") 魚塘控制系統(tǒng)總體設(shè)計(jì)
魚塘控制系統(tǒng)總體設(shè)計(jì)

本設(shè)計(jì)由開發(fā)者針對(duì)傳統(tǒng)魚塘的養(yǎng)殖和管理現(xiàn)狀,面向中小型魚塘養(yǎng)殖戶設(shè)計(jì)開發(fā)了一套魚塘智能控制系統(tǒng),滿足魚塘養(yǎng)殖環(huán)境的數(shù)據(jù)采集、無(wú)線傳輸、實(shí)時(shí)顯示、遠(yuǎn)近程手動(dòng)控制和自動(dòng)控制等功能上的需求,可及時(shí)檢測(cè)和控制影響魚類生存生長(zhǎng)的環(huán)境因素,避免人工判斷觀察失誤或者操作的不及時(shí)造成大量魚類死亡,有效減少人工成本消耗,而且還能降低系統(tǒng)運(yùn)行維護(hù)成本,以適應(yīng)中小型魚塘養(yǎng)殖戶節(jié)約成本的問(wèn)題。
一、系統(tǒng)總體設(shè)計(jì)
本魚塘控制系統(tǒng)主要由下位機(jī)設(shè)備控制端、云平臺(tái)以及 APP 端組成。
下位機(jī)
下位機(jī)是整個(gè)系統(tǒng)的控制執(zhí)行部分,通過(guò)傳感器對(duì)魚塘環(huán)境因子進(jìn)行檢測(cè)以及控制通過(guò)控制設(shè)備調(diào)節(jié)魚塘環(huán)境因子,通過(guò)本地顯示面板實(shí)現(xiàn)近程控制。通過(guò) APP端,可以遠(yuǎn)程觀測(cè)魚塘環(huán)境因子情況,并實(shí)現(xiàn)對(duì)魚塘的遠(yuǎn)程控制。云平臺(tái)作為數(shù)據(jù)中轉(zhuǎn)站,APP通過(guò)云平臺(tái)接收下位機(jī)上傳的數(shù)據(jù)以及向下位機(jī)的控制設(shè)備發(fā)送控制命令。
本系統(tǒng)在運(yùn)行時(shí),下位機(jī)設(shè)備控制端利用串口通過(guò) WiFi 模塊與外界通信,云平臺(tái)作為數(shù)據(jù)中轉(zhuǎn)中心,WiFi 和云平臺(tái)利用廣域網(wǎng)通過(guò)云端平臺(tái)進(jìn)行通信。
云平臺(tái)選擇
本系統(tǒng)設(shè)計(jì)選用機(jī)智云物聯(lián)網(wǎng)云平臺(tái),為物聯(lián)網(wǎng)開發(fā)者提供方便,機(jī)智云平臺(tái)搭建好后,平臺(tái)可直接提供相應(yīng)的 API 和 SDK,在開發(fā) APP 時(shí)無(wú)需考慮繁雜的通訊協(xié)議,只需要考慮功能開發(fā)便可,降低了開發(fā)者的開發(fā)難度,也提高了開發(fā)效率。
為了更清晰地了解機(jī)智云,下面簡(jiǎn)單地總結(jié)了機(jī)智云平臺(tái)的幾個(gè)特點(diǎn):
(1)靈活穩(wěn)定。它的接入能力非常強(qiáng),峰值時(shí)期可以允許上億臺(tái)設(shè)備同時(shí)接入。而且連接穩(wěn)定可靠,機(jī)智云物聯(lián)網(wǎng)云平臺(tái)可以在短時(shí)間里處理上一條數(shù)據(jù)。
(2)使用簡(jiǎn)單。機(jī)智云平臺(tái)提供了許多的技術(shù)資料,擁有完整的開發(fā)流程,極大地降低了開發(fā)難度。
(3)功能豐富。在機(jī)智云上開發(fā)項(xiàng)目的時(shí)候,用戶可以按照自己的實(shí)際需求,可以把多個(gè)應(yīng)用模塊組合在一起,開發(fā)者也可以更加方便地對(duì)這些項(xiàng)目進(jìn)行管理。
(4)方案豐富。機(jī)智云的市場(chǎng)調(diào)研團(tuán)隊(duì)非常強(qiáng)大,結(jié)合全世界各種類型的業(yè)務(wù),盡可能地給各個(gè)行業(yè)提供了解決方案,而且方案庫(kù)還在繼續(xù)完善和增加。
APP端
使用機(jī)智云提供的 APP開源框架設(shè)計(jì)一款魚塘控制APP進(jìn)行遠(yuǎn)程控制,并選用機(jī)智云官方提供的終端進(jìn)行調(diào)試。
二、系統(tǒng)硬件實(shí)現(xiàn)
系統(tǒng)的硬件決定了系統(tǒng)具體能夠?qū)崿F(xiàn)的場(chǎng)景功能,一個(gè)良好的硬件設(shè)計(jì)直接關(guān)系到系統(tǒng)的穩(wěn)定性以及性能的優(yōu)勢(shì)。
2.1、硬件端的整體結(jié)構(gòu)
根據(jù)用戶的需求和設(shè)計(jì)的要求,本系統(tǒng)的硬件部分由主控單元、WiFi通訊模塊、傳感器模塊、控制模塊、顯示模塊及電源模塊等多個(gè)模塊構(gòu)成,硬件端框架圖如下所示:
2.2、硬件模塊組成
本文設(shè)計(jì)的智能水產(chǎn)養(yǎng)殖之魚塘控制系統(tǒng)全部由模塊化設(shè)計(jì)
由根據(jù)上面的模塊組成圖可以看出,主控芯片模塊在中心的位置,它的作用是對(duì)所有模塊和設(shè)備進(jìn)行控制,使這些外圍模塊相互協(xié)作形成一個(gè)完整的硬件控制系統(tǒng),其利用本身的 I/O 接口或串口與傳感器模塊進(jìn)行通信,獲得傳感器的監(jiān)測(cè)數(shù)據(jù);以及對(duì)控制模塊進(jìn)行控制,使相應(yīng)的環(huán)境調(diào)節(jié)設(shè)備做出動(dòng)作;通過(guò) UART 與 WIFI 模塊進(jìn)行數(shù)據(jù)交換;以及與顯示模塊進(jìn)行通信,及時(shí)地將監(jiān)測(cè)傳感器上傳的數(shù)據(jù)以及控制動(dòng)作顯示在屏幕上。
2.3、硬件模塊實(shí)現(xiàn)
根據(jù)模塊組成圖,下面分別對(duì)各大模塊進(jìn)行介紹。
主控芯片
在魚塘智能控制系統(tǒng)中選擇STM32F103ZET6微處理器作為主控芯片,為了確保系統(tǒng)對(duì)數(shù)據(jù)的快速處理、數(shù)據(jù)交換和傳輸過(guò)程中速率的精確性,因此采用STM32 最小開發(fā)板
顯示模塊
顯示面板采用SDWa050T04屏幕,具有電容觸摸、電阻觸摸和不帶觸摸三種類型,用于對(duì)魚塘數(shù)據(jù)顯示和觸摸控制。
控制輸出模塊
本文采用繼電器控制模塊來(lái)進(jìn)行對(duì)外圍設(shè)備,如進(jìn)水泵、排水泵、酸堿液體泵、熱水泵、充氧機(jī)的驅(qū)動(dòng)控制
系統(tǒng)設(shè)計(jì)檢測(cè)溫度選擇防水封裝類型的 DS18B20 溫度傳感器。
水位傳感模塊
本系統(tǒng)的水位傳感器選用的是 HC-SR04 超聲波傳感器。
由上圖可以看出,該模塊有四個(gè)引腳,分別是:VCC、TRAG、ECHO、GND,其中 VCC 接 5V 電源;TRAG 控制端口,單片機(jī)通過(guò)該端口控制該模塊發(fā)送超聲波,ECHO 是接收端,單片機(jī)通過(guò)該端口接收返回的監(jiān)測(cè)信號(hào),GND 連接地線。我們?cè)谠O(shè)計(jì)時(shí)只需要將 TRAG 和 ECHO 兩個(gè)引腳與單片機(jī)連接即可。
溶解氧/溫度氣壓傳感模塊
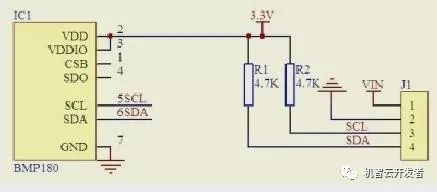
由于水中的溶氧量與當(dāng)?shù)貧鉁睾痛髿鈮河兄芮械年P(guān)系,只要測(cè)量出空氣中的氣溫和氣壓后可以間接地計(jì)算出水中的溶解氧的含量。考慮到溶解電極昂貴的價(jià)格,因此可用溫度氣壓模塊替代溶解氧傳感模塊,進(jìn)而間接地測(cè)量當(dāng)?shù)厮械娜芙庋酰瑴囟葰鈮耗K選用BMP180 繼承模塊,實(shí)物圖如下所示。
該模塊的電路原理圖如下:
PH傳感模塊
PH 傳感器模塊由PH傳感器和放大電路組成,PH傳感器采用 E201-C-9傳感器,是用兩種電極結(jié)合的組成的復(fù)合電極,可測(cè)量的PH范圍為0-14,零點(diǎn)電位PH為 7±0.25,測(cè)量水溫的范圍為0-80℃,PH傳感器實(shí)物如下所示。
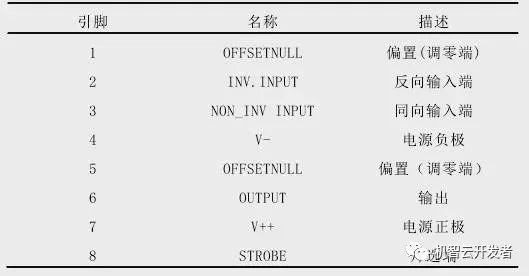
由于E201-C-9 探頭在實(shí)際使用過(guò)程中需要對(duì)輸出的電流進(jìn)行放大,為此還需外加 CA3140運(yùn)算放大器。
CA3140封裝圖:
CA3140引腳說(shuō)明:
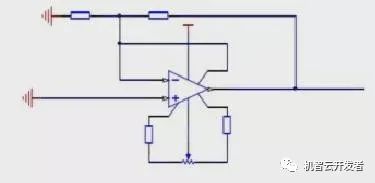
本放大電路的電路圖如下所示,通過(guò)CA3140將 PH傳感探頭輸出的信號(hào)放大,然后單片機(jī)對(duì)該信號(hào)進(jìn)行 AD 轉(zhuǎn)換,最終得出 PH 的值。
WiFi模塊
采用ESP8266的WiFi透?jìng)髂K,在系統(tǒng)中起著連接下位機(jī)和云平臺(tái)的作用。
電源模塊
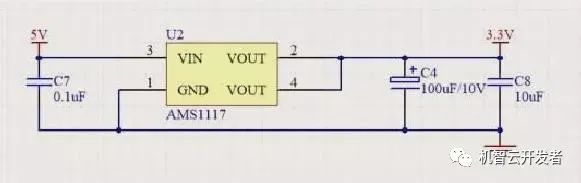
為了保證系統(tǒng)各個(gè)模塊能穩(wěn)定持續(xù)地工作,需要為各個(gè)模塊提供相應(yīng)的工作電源,本系統(tǒng)需要的支持電源分為 5V 和 3.3V 兩類,因此在本系統(tǒng)中,利用 AMS1117 芯片來(lái)進(jìn)行從 5V 到 3.3V 的轉(zhuǎn)換。
AMS1117的電路圖:
三、系統(tǒng)軟件設(shè)計(jì)
3.1、下位機(jī)顯示面板設(shè)計(jì)
使用VGUS 軟件在對(duì)串口屏界面進(jìn)行設(shè)計(jì)時(shí),根據(jù)本系統(tǒng)的實(shí)際情況,完成四個(gè)功能界面設(shè)計(jì),分別是主界面、環(huán)境監(jiān)控、環(huán)境控制以及閥值設(shè)置界面。
主界面主要是為用戶提供一個(gè)功能導(dǎo)航頁(yè)面,根據(jù)用戶當(dāng)時(shí)的需要來(lái)選擇要進(jìn)入的界面,可用作設(shè)備異常時(shí)進(jìn)行顯示和報(bào)警,還可通過(guò)實(shí)時(shí)監(jiān)控界面查看當(dāng)前魚塘環(huán)境的實(shí)時(shí)參數(shù);控制界面可以對(duì)外圍設(shè)備進(jìn)行直接控制。
3.2、串口屏界面控制
系統(tǒng)開機(jī)時(shí)默認(rèn)首先進(jìn)入到主界面,我們可以在主界面進(jìn)入對(duì)應(yīng)的配置環(huán)境,以便于我們查看魚塘的環(huán)境參數(shù),主界面顯示如圖所示。
通過(guò)主界面可選擇進(jìn)入環(huán)境監(jiān)測(cè)這個(gè)界面,可以看到魚塘環(huán)境各種參數(shù)的實(shí)時(shí)信息,包括被控制設(shè)備的狀態(tài),方便魚塘工作人員進(jìn)行管理,結(jié)合底層傳感器上傳的數(shù)據(jù),直觀地觀察到當(dāng)前魚塘環(huán)境參數(shù)以及各種設(shè)備的控制狀態(tài),該實(shí)時(shí)監(jiān)測(cè)界面如圖所示。
從主界面進(jìn)入到控制界面,在控制界面可以對(duì)調(diào)節(jié)環(huán)境的外圍硬件設(shè)備進(jìn)行手動(dòng)的方式控制或者設(shè)置自動(dòng)控制,控制界面如圖所示。
同時(shí)可以聯(lián)合閾值設(shè)定,對(duì)各種環(huán)境變量進(jìn)行控制,更加方便快捷的對(duì)魚塘環(huán)境因子做出最敏捷的反饋,實(shí)現(xiàn)魚塘環(huán)境控制的自動(dòng)化,閾值設(shè)定界面如圖所示。
3.3、下位機(jī)軟件設(shè)計(jì)
本設(shè)計(jì)下位機(jī)采用 STM32F103 作為核心控制器,在下位機(jī)的軟件設(shè)計(jì)上采用模塊化的編程思想,將外設(shè)驅(qū)動(dòng)以及各功能子程序模塊化。主程序當(dāng)中首先進(jìn)行系統(tǒng)初始化,配置并使能系統(tǒng)時(shí)鐘,初始化中斷向量表,然后依次配置各外設(shè)引腳以及對(duì)外設(shè)的初始化。
接著對(duì)各個(gè)傳感器模塊以及 ESP8266 WiFi模塊等外圍設(shè)備進(jìn)行初始化,然后上傳和下載云端保存的魚塘控制數(shù)據(jù)以及獲取用戶通過(guò)串口屏操作的控制數(shù)據(jù),接下來(lái)就是運(yùn)行水溫、水位、溶解氧以及 PH值的控制子程序。通過(guò)這個(gè)控制子程序來(lái)實(shí)現(xiàn)對(duì)魚塘環(huán)境的控制,接下來(lái)就重點(diǎn)講解這幾個(gè)控制子程序。
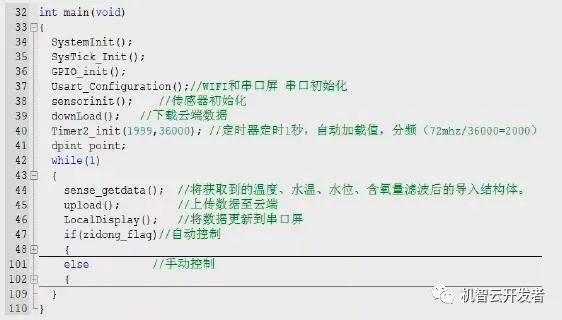
由于主程序代碼太長(zhǎng),下面僅展示主程序配置部分,主程序配置部分程序如圖所示:
水溫控制子程序
魚塘水溫由DS18B20傳感器進(jìn)行監(jiān)測(cè),當(dāng)前溫度低于預(yù)設(shè)水溫閥值下限,那么打開熱水進(jìn)水閥;當(dāng)溫度高于預(yù)設(shè)水溫閥值上限時(shí)打開冷水進(jìn)水閥來(lái)綜合魚塘的溫度。如果監(jiān)測(cè)到的水溫在預(yù)設(shè)閥值以內(nèi),那么關(guān)閉冷水和熱水的進(jìn)水閥。溫度控制子程序流程圖如圖所示:
水位控制子程序
水位傳感器是利用超聲波模塊來(lái)監(jiān)測(cè)水面到地面的距離,獲取魚塘底到地面的距離,可計(jì)算出魚塘中水位高度。如果實(shí)際水位高度高于預(yù)設(shè)閥值上限,那么打開排水泵進(jìn)行泄洪。當(dāng)實(shí)際水位低于預(yù)設(shè)閥值下限,此時(shí)打開進(jìn)水泵增加魚塘的水量,保證魚類的生存區(qū)域。
溶解氧/溫度氣壓控制子程序
由BMP180傳感器檢測(cè)出當(dāng)?shù)貧鉁睾蜌鈮汉螅苯佑?jì)算氣溫和氣壓與水中溶氧量的計(jì)算關(guān)系得出水中的溶氧量,通過(guò)打開充氧機(jī)充氧的方式來(lái)控制水中的含氧量,而水中含氧量的飽和不會(huì)影響魚類生長(zhǎng),因此,我們只需要在水中溶氧量不足時(shí)打開充氧機(jī)即可。溶氧量控制子程序流程圖如圖所示:
3.4、上位機(jī)軟件設(shè)計(jì)
WiFi模塊軟件設(shè)計(jì)
本系統(tǒng)是選用的 ESP8266 WiFi模塊與機(jī)智云的云端建立連接關(guān)系,先在WiFi 模塊里燒錄機(jī)智云GAgent 固件,然后利用 GizWits 協(xié)議接入到機(jī)智云云端,下位機(jī)每 30 秒將會(huì)和云端通信一次,進(jìn)行上報(bào)數(shù)據(jù)以及下載控制變動(dòng)。ESP8266 使用指令互相發(fā)送請(qǐng)求與應(yīng)答的方法與 STM32 建立通信,兩者之間使用串口進(jìn)行通信。
ESP8266 有 AirLink 和 Soft AP 兩種入網(wǎng)模式,下位機(jī)在初始化時(shí)將其配置成 AirLink方式入網(wǎng);STM32 主要是向 ESP8266 發(fā)送查詢指令和控制指令。而 ESP8266 則通過(guò)向 STM32 發(fā)送查詢指令來(lái)獲取 STM32 的狀態(tài);通過(guò)發(fā)送控制命令是將 APP 端上傳到機(jī)智云的控制數(shù)據(jù)發(fā)送至下位機(jī)。
接入機(jī)智云軟件設(shè)計(jì)
在設(shè)備接通電源以后,在 ESP8266 WiFi模塊第一次接入機(jī)智云云端之前,需將 ESP8266 設(shè)置為 AirLink 模式。
本文采用的 ESP8266 在完成燒錄機(jī)智云GAgent 固件之后便內(nèi)置了此模式。WiFi模塊使用 GitWits 協(xié)議和機(jī)智云建立連接,在連接成功后,會(huì)不斷地向主控芯片發(fā)送獲取設(shè)備狀態(tài)的請(qǐng)求,STM32 每過(guò)一段時(shí)間都會(huì)上報(bào)設(shè)備信息給 ESP8266。接入機(jī)智云平臺(tái)流程圖如圖所示:
機(jī)智云IoT云平臺(tái)接入開發(fā)
下面來(lái)了解一下使用機(jī)智云開發(fā)產(chǎn)品的步驟流程:
◆ 在機(jī)智云官網(wǎng)注冊(cè)一個(gè)屬于自己的賬號(hào),以后在上面創(chuàng)建的項(xiàng)目也是通過(guò)個(gè)人賬號(hào)來(lái)管理。
◆ 賬號(hào)登錄后,進(jìn)入到機(jī)智云地開發(fā)者中心,點(diǎn)擊開發(fā)一個(gè)新的產(chǎn)品,在里面根據(jù)自己項(xiàng)目需要新建數(shù)據(jù)點(diǎn),項(xiàng)目的云平臺(tái)數(shù)據(jù)點(diǎn)如圖所示。
◆ 我們使用機(jī)智云提供的 APP 進(jìn)行遠(yuǎn)程控制,選用機(jī)智云官方提供的終端進(jìn)行調(diào)試。
◆ 利用機(jī)智云IoT云平臺(tái)提供的虛擬設(shè)備進(jìn)行虛擬調(diào)試,虛擬設(shè)備調(diào)試通過(guò)后點(diǎn)擊生成 MCU 代碼,將其移植到自己的處理器當(dāng)中。
◆ 下載機(jī)智云的GAgent 固件并燒錄到 ESP8266 WiFi 模塊內(nèi)。
◆ 直接使用機(jī)智云官方提供的代碼,移植到本系統(tǒng)里。在 MCU 開發(fā)方案那里,選擇 STMM32F103ZET6 硬件平臺(tái)的開發(fā),然后填入 Products secret,這個(gè)可以在產(chǎn)品基本信息里查看,然后點(diǎn)擊生成代碼包,最后,在 MCU 開發(fā)里下載根據(jù)自己項(xiàng)目生成的相應(yīng)的代碼包,將其移植進(jìn)來(lái)。
下面就重點(diǎn)介紹代碼的移植和修改過(guò)程。在移植代碼時(shí),非常關(guān)鍵的一步便是移植 GizWits 文件夾,其中主要包含了四個(gè)文件:gizwits_product.c 是處理和功能有關(guān)的文件;gizwits_product.h 是.c 文件的頭文件,不需要去修改它;gizwits_protocol.c 主要功能是處理相關(guān)的協(xié)議;gizwits_protocol.h 里定義了通信密匙以及一些變量和結(jié)構(gòu)體等。
GizWits 文件夾的移植分為五個(gè)步驟:
◆ 利用機(jī)智云Gizwits提供的 gizputdaat()和 uartwrite()函數(shù)通過(guò)串口進(jìn)行數(shù)據(jù)的收發(fā),以實(shí)現(xiàn)WiFi模塊與主控芯片之間的通信。
◆ 程序在運(yùn)行時(shí)在一些必要的時(shí)候需要復(fù)位,這里就需要用到復(fù)位函數(shù)。ESP8266 在和主控通信時(shí)便是如此,mcurestart()便是這個(gè)函數(shù),對(duì)WiFi模塊進(jìn)行軟件復(fù)位。
◆ 通過(guò)使用 GizWitsSetMode()函數(shù),以選擇通過(guò)什么樣子的方式入網(wǎng),可以進(jìn)行復(fù)位、Soft AP、AirLink 以及綁定設(shè)備這五種模式進(jìn)行配置。
◆ 通過(guò)結(jié)構(gòu)體 dpint 把采集到的各項(xiàng)數(shù)據(jù)上傳到云端,結(jié)構(gòu)體內(nèi)容如下:
typedef struct{
bool coldin; //冷水進(jìn)水泵
bool waterout; //出水泵
bool warmIn; //熱水進(jìn)水泵
bool jiasuan; //加酸水泵
bool jiajian; //加酸水泵
int watertemp; //水溫
int watertempup; //水溫上限
int watertempdown; //水溫下限
float ph; //PH 值
float phup; //PH 上限
float phdown; //PH 下限
int o2; //溶解氧
int o2down; //溶解氧下限
int watrlevel; //水位
int waterlevelup; //水位上限
int waterleveldown;//水位下限
}dpint; //數(shù)據(jù)點(diǎn)
◆ 實(shí)現(xiàn)系統(tǒng)內(nèi)設(shè)備的控制功能。在 gizwitsEventProcess()事件處理函數(shù)中添加需要處理數(shù)據(jù)點(diǎn)的事件,當(dāng)設(shè)備收到云端下發(fā)的信息時(shí),將會(huì)根據(jù)具體情況選擇如何執(zhí)行何種控制動(dòng)作。
四、系統(tǒng)總結(jié)
本文設(shè)計(jì)的魚塘控制原型系統(tǒng)主要介紹了系統(tǒng)的下位機(jī)的軟硬件實(shí)現(xiàn)、以及上位機(jī)云平臺(tái)的接入等部分。在確保云平臺(tái)與 APP 端之間是否能正常通信,這可以利用機(jī)智云官方提供的虛擬設(shè)備,它模擬設(shè)備進(jìn)行數(shù)據(jù)推送,手機(jī) APP 通過(guò)掃云端二維碼綁定云端虛擬設(shè)備,接著就進(jìn)行驗(yàn)證云端和 APP 之間的數(shù)據(jù)收發(fā)。
在云端虛擬設(shè)備中分別填入要下發(fā)的數(shù)據(jù)點(diǎn)的值,然后點(diǎn)“推送”按鈕,將數(shù)據(jù)下發(fā)給 APP,APP 端能夠收到數(shù)據(jù)并顯示;接著在 APP 端設(shè)置數(shù)據(jù)的值,然后可看到云端虛擬設(shè)備能夠同步響應(yīng),則成功實(shí)現(xiàn)通信。
本魚塘智能控制系統(tǒng)設(shè)計(jì)操作簡(jiǎn)單,界面簡(jiǎn)潔直觀,簡(jiǎn)單易上手,可實(shí)時(shí)監(jiān)控,控制反應(yīng)快,使魚塘養(yǎng)殖變得更加簡(jiǎn)單,可以極大地降低勞動(dòng)強(qiáng)度,節(jié)省勞動(dòng)成本的同時(shí)也提高了養(yǎng)殖效率,系統(tǒng)整體實(shí)物效果圖如下所示。
責(zé)任編輯:haq
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6780瀏覽量
112149 -
機(jī)智云
+關(guān)注
關(guān)注
3文章
617瀏覽量
26841
原文標(biāo)題:基于機(jī)智云自助開發(fā)平臺(tái)的智能水產(chǎn)養(yǎng)殖之魚塘控制系統(tǒng)設(shè)計(jì)
文章出處:【微信號(hào):IoTMaker,微信公眾號(hào):機(jī)智云開發(fā)者】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
雙電機(jī)比值聯(lián)動(dòng)控制系統(tǒng)
智慧閘門遠(yuǎn)程控制系統(tǒng)的主要功能有哪些?


大棚聯(lián)網(wǎng)與智能控制系統(tǒng)如何改變農(nóng)業(yè)生態(tài)?
電機(jī)微機(jī)控制系統(tǒng)可靠性分析
DCS控制系統(tǒng)的配置與實(shí)施流程
智能魚塘物聯(lián)網(wǎng)系統(tǒng)
自動(dòng)控制系統(tǒng)與物聯(lián)網(wǎng)的結(jié)合 自動(dòng)控制系統(tǒng)的實(shí)時(shí)監(jiān)測(cè)技術(shù)
自動(dòng)控制系統(tǒng)的調(diào)試方法 自動(dòng)控制系統(tǒng)與傳統(tǒng)控制系統(tǒng)的比較
自動(dòng)控制系統(tǒng)的基本原理 自動(dòng)控制系統(tǒng)在工業(yè)中的應(yīng)用
基于PWM的溫度控制系統(tǒng)設(shè)計(jì)
步進(jìn)電機(jī)伺服控制系統(tǒng)的作用
控制系統(tǒng)整定的方法和步驟
為什么要對(duì)控制系統(tǒng)進(jìn)行整定
伺服控制系統(tǒng)的分類方式和常見伺服控制系統(tǒng)介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論