") 深度解讀長度可變連桿操縱方案
深度解讀長度可變連桿操縱方案
先進的混合動力總成管理控制系統(tǒng)通常面臨著高度復雜的需求,本文評述了新材料解決方案和互聯(lián)技術(shù)將如何提升系統(tǒng)效率,以及如何實現(xiàn)具有較強預測功能的管理過程。
0 前言
發(fā)動機的集成工作主要由其操縱系統(tǒng)完成。以前的解決方案通常基于機械操縱單元的改進,但機械操縱單元必須集成在靠近曲軸的底端結(jié)構(gòu)中。這對于不同類型的發(fā)動機而言,就會涉及到較大的結(jié)構(gòu)性調(diào)整。
因此,研究人員開發(fā)了1種液壓操縱方案替代機械操作方案,這種操縱適用于各類型的發(fā)動機而無須作任何結(jié)構(gòu)調(diào)整,并且也不需要對潤滑系統(tǒng)作調(diào)整。研發(fā)人員目前進行的第2個方案開發(fā)則是基于電磁操縱,可實現(xiàn)發(fā)動機壓縮比的無級變化。
1 挑戰(zhàn)
相關(guān)文獻已介紹了以下2種可變壓縮比(VCR)連桿方案。在第1種方案中,連桿長度變化是通過偏心活塞銷軸承來實現(xiàn)的,由該軸承承受2個液壓缸上的力矩。目前,這種方案的工業(yè)化進程正在推進。第2種方案則是基于可伸縮連桿,并由1個雙向作用的液壓缸來支撐2個力,對于批量生產(chǎn),這種方案還要進行優(yōu)化。
在這2種系統(tǒng)中,液壓缸的排空過程都是通過連桿中的1個雙通換向閥(以下稱為主換向閥)來實現(xiàn)的。由于要截斷機油的高壓力,特別是在可伸縮連桿情況下,主換向閥必須布置在連桿中。
因此,這2種方案所面臨的挑戰(zhàn)在于對主換向閥的操縱過程,并且要求主換向閥在所有運行條件下都能可靠,且能夠迅速被操縱,同時應盡量減少主換向閥的集成費用和附加零件成本。理想的操縱方式是采用無接觸的方案,實現(xiàn)完全可變的連桿操作。
2 液壓操縱系統(tǒng)
在液壓操縱系統(tǒng)中,主換向閥與操縱機油壓力的液壓執(zhí)行器是相互連通的。在最簡單的情況下,這種執(zhí)行器由1個加載彈簧力的活塞構(gòu)成,該活塞承受著連桿軸承潤滑油供油槽中的機油壓力。
因此,研究人員可以通過改變主油道中的機油壓力來操縱主換向閥,可使用可調(diào)式機油泵。在試驗過程中,研究人員通過“直接”液壓操縱功能來改變機油壓力,使其僅能在1個有限的運行范圍內(nèi)運作。研發(fā)人員在實際應用中增加了1個附加電動機油泵為連桿軸承提供相應的高油壓,而不再依賴發(fā)動機潤滑系統(tǒng)。
在分離式控制油壓管道的液壓操縱系統(tǒng)方案中,曲軸內(nèi)布設(shè)有獨立的分離式控制油壓管道。控制油壓的管道與位于曲軸中的3/2通閥(先導閥)相通,流體可與曲軸箱相連,也可與機油供應側(cè)相連。
同時,根據(jù)該系統(tǒng)的情況,研究人員在2個軸承軸瓦上分別設(shè)置1個供油槽,以便使VCR連桿與曲軸之間建立獨立的流體連接,先導閥則由1個行程電磁執(zhí)行器來操縱。
未通電時的接通位置,控制油壓與環(huán)境壓力相對應,此時的主換向閥不工作,系統(tǒng)高壓縮比(εHigh)被激活。當然,研究人員也可以把主換向閥設(shè)計成在非控制油壓情況下,系統(tǒng)低壓縮比(εLow)被激活。
配備有獨立分離式控制油壓管道的液壓操縱系統(tǒng)的結(jié)構(gòu)。先導閥位于曲軸前端旋轉(zhuǎn)軸中心第1曲柄臂側(cè),通過電磁執(zhí)行器來操縱。操縱力由穿過中心螺栓的壓桿進行傳遞。控制油壓從先導閥出發(fā),經(jīng)過孔和管道直至最終傳遞到連桿軸頸。
每個連桿軸承的液壓系統(tǒng)都是獨立的,由相鄰的主軸承額外供應機油。研究人員在每個連桿軸頸的3個平面上均設(shè)置了輸出孔:在第1個平面上90 °交叉處布置了2個輸出孔,用于傳遞控制油壓;在位于軸頸中間的第2個平面上,徑向布置了2個輸出孔,用于潤滑軸承;
在第3個平面上90 °交叉處布置了2個輸出孔,用于為VCR液壓系統(tǒng)傳輸機油。另外,研究人員還在連桿軸瓦上分段加工了出油槽,該油槽對稱于軸瓦剖分面伸展略大于90 °,這樣就能實現(xiàn)主軸承與連桿之間永久性的機油傳輸。
采用這種油槽設(shè)計方案的優(yōu)點是不會削弱軸承的主要承載區(qū)域。主換向閥由1個帶有控制邊緣的彈簧加載滑閥組成,在受非控制油壓作用的情況下,VCR連桿的GKS支撐油腔出口管道關(guān)閉,MKS支撐油腔打開,意味著主換向閥在接通位置時,系統(tǒng)會以εHigh運行。
3 試驗車輛
為了驗證獨立分離式控制油壓管道的液壓操縱系統(tǒng)的轉(zhuǎn)換特性,研究人員選取了福特嘉年華(Ford Fiesta)作為試驗車輛,并在真實環(huán)境行駛狀況下進行了試驗。該試驗汽車搭載了1款3缸1.0 L增壓直噴式發(fā)動機。
其中專門設(shè)計的VCR連桿與樣品活塞組合,能獲得2種壓縮比,高壓縮比εHigh為12.11,低壓縮比εLow為9.56。為了安裝電磁執(zhí)行器,研究人員在曲軸扭振減振器前設(shè)置了1塊支承板(圖3),該執(zhí)行器連接在發(fā)動機凸輪軸相位調(diào)節(jié)器上。
為了采集實時連桿長度(即瞬時壓縮比ε)數(shù)據(jù),研究人員在氣缸體曲軸上安裝了霍爾傳感器(ε 傳感器)。此外,研究人員未對試驗車輛的發(fā)動機進行其他方面的修改,同時為發(fā)動機添加了由國際自動機工程師學會(SAE)認證的粘度等級為0W40的全合成機油。
研究人員采用了1個可自由編程的發(fā)動機電控單元(Motec M800)作為獨立的VCR 電控單元,用于處理ε傳感器信號和控制執(zhí)行器所產(chǎn)生的數(shù)據(jù)。對發(fā)動機的管理是通過具有量產(chǎn)數(shù)據(jù)狀態(tài)的量產(chǎn)發(fā)動機電控器來實現(xiàn)的。每個瞬時ε和其他測量值都被記錄下來,并在汽車中控的顯示屏上得以顯示。
4 在汽車上的試驗
試驗驗證了壓縮比能精確、可靠地轉(zhuǎn)換,并且對發(fā)動機的機油用量不會造成明顯的干擾。該值以100 Hz測試速率為標準進行記錄。研究人員將進氣管壓力作為負荷參數(shù),當進氣管壓力超過依據(jù)轉(zhuǎn)速的轉(zhuǎn)換閾值時,壓縮比就開始向εLow轉(zhuǎn)換;
當進氣管壓力低于轉(zhuǎn)換閾值并持續(xù)3 s后,壓縮比就開始向εHigh反向轉(zhuǎn)換。向εLow轉(zhuǎn)換和隨后向εHigh反向轉(zhuǎn)換的過程,其中t=0 s的時間點相當于執(zhí)行器電流被切斷的時刻。
通過試驗,研究人員得出如下結(jié)論:(1)在向εLow轉(zhuǎn)換過程中,第1氣缸連桿在約0.1 s后首先開始動作,其他氣缸連桿緊跟其后,連桿的最小時間偏差是由點火偏差造成的,而非控制油壓在曲軸中的傳播造成;
(2)在t=0.5 s時,所有連桿都達到了最終的εLow狀態(tài),向εHigh反向轉(zhuǎn)換有約0.1 s的偏差;(3)在t=0.8 s時,所有連桿都達到了最終εHigh狀態(tài)。在試驗中,研究人員發(fā)現(xiàn)機油壓力p機油信號曲線并沒有因試驗轉(zhuǎn)換過程而出現(xiàn)明顯的變化。此外,所顯示的轉(zhuǎn)換過程也沒有出現(xiàn)完全相似的曲線。
5 電磁操縱
液壓支持的VCR連桿的全可變運行可通過2點調(diào)節(jié)和選擇氣缸操縱來進行。若VCR 連桿采用2點調(diào)節(jié)方式,則須對連桿長度進行調(diào)節(jié),其調(diào)節(jié)量即連桿的長度,但連桿長度在曲軸每1轉(zhuǎn)后都需要重新檢測1次。
若VCR連桿選擇氣缸操縱方式,就可在開始時縮短或增大連桿的長度。為了盡可能精確校準連桿長度額定值,主換向閥必須較為頻繁地實現(xiàn)來回轉(zhuǎn)換。無接觸的電磁操縱已被證實是最有技術(shù)潛力的操縱方式,研究人員已通過采用該方式,制成了功能性演示裝置。
VCR連桿及所旋入的閥結(jié)構(gòu)組件應與安裝在試驗汽車上的VCR裝配桿結(jié)構(gòu)相同。閥結(jié)構(gòu)組件包括1個主換向閥(由液壓操縱的3/2通閥組成)和1個先導閥(由電磁操縱的4/2通閥組成)。
其中,先導閥的滑閥起著磁回路中銜鐵的作用,它與固定發(fā)動機結(jié)構(gòu)相連的電磁鐵有2個線圈,并在滑動時使銜鐵偏移1 mm。圖5示出了借助于磁通模擬以優(yōu)化瞬態(tài)磁場建立和操縱力曲線的示意圖。
電磁操縱方案的功能檢驗是在1個氣缸單元的倒拖模擬裝置上進行的。圖5中的曲線圖示出了在轉(zhuǎn)速為2 000 r/min時的實時壓縮比變化曲線及線圈電流變化曲線。為實現(xiàn)轉(zhuǎn)速的調(diào)整,試驗在實時值環(huán)繞額定值為±10%的窗口中以波動方式進行。
在選定裝備及運行工況點的情況下,發(fā)動機平均每14轉(zhuǎn)就需要實施1次調(diào)節(jié)。目前,該試驗已在轉(zhuǎn)速3 000 r/min以下的范圍內(nèi)證實,可以實現(xiàn)功能的轉(zhuǎn)換。
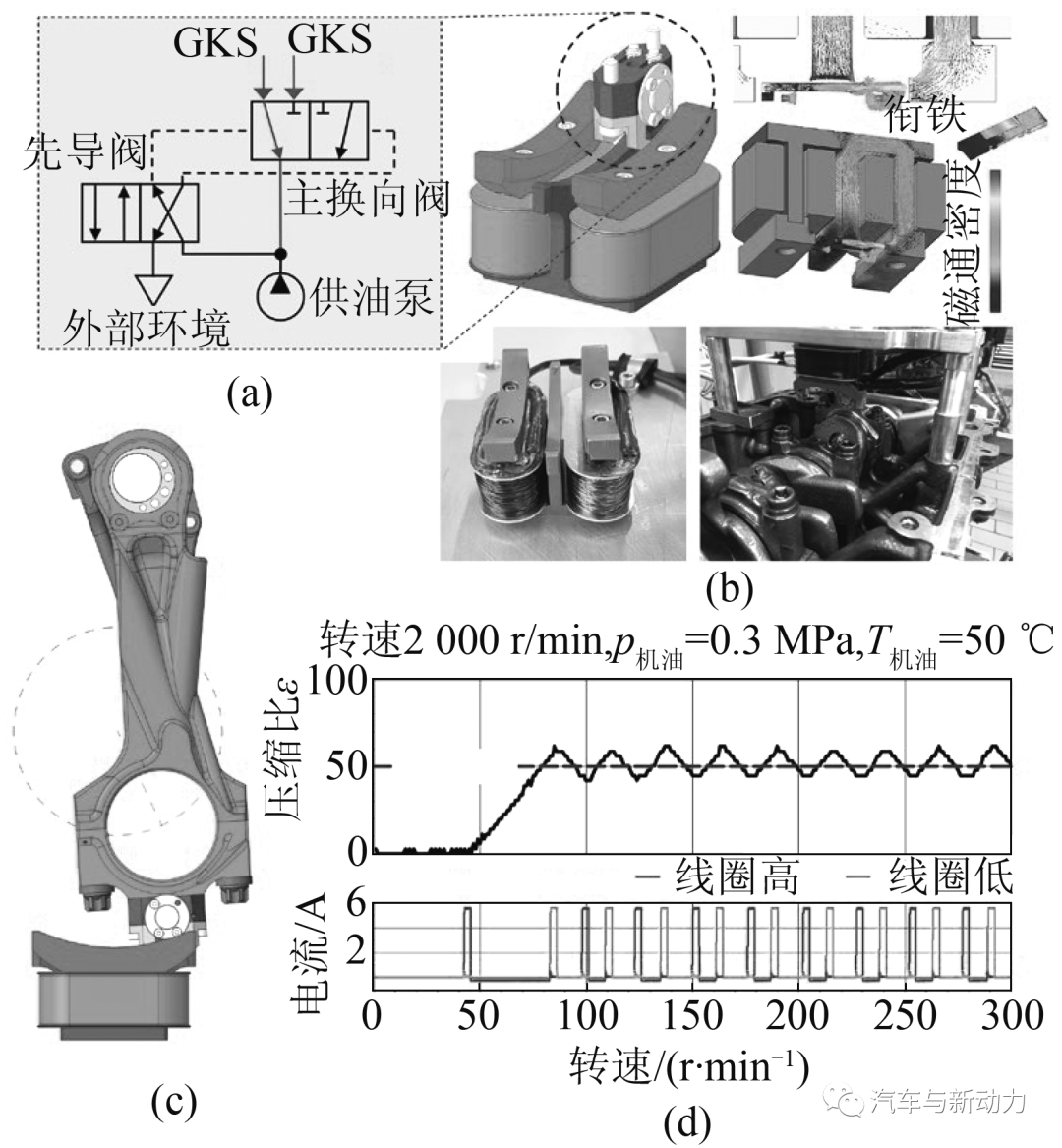
圖5 借助于電磁操縱調(diào)準中間位置
6 結(jié)語
本文介紹了2種VCR連桿無接觸式操縱方案。第1種方案減少了在安裝行程電磁執(zhí)行器和氣缸體曲軸箱上ε傳感器方面的集成工作。因VCR曲柄連桿的部件與傳統(tǒng)的部件無關(guān),可以完全以相同的方式安裝在發(fā)動機上。
該方案已在超過1 000 km的實際行駛條件下進行了試驗,并已證實是可靠和穩(wěn)定的。第2種電磁操縱方案可采用氣缸或無接觸操縱方式,這使得受液壓系統(tǒng)支持的VCR連桿能具有較好的連續(xù)可調(diào)節(jié)性。該功能在倒拖運行試驗中也已得到了驗證。未來,研究人員將致力于對轉(zhuǎn)換閥結(jié)構(gòu)組件的進一步優(yōu)化。
編輯:jq
-
發(fā)動機
+關(guān)注
關(guān)注
33文章
2529瀏覽量
70578 -
液壓
+關(guān)注
關(guān)注
3文章
209瀏覽量
21007 -
執(zhí)行器
+關(guān)注
關(guān)注
5文章
382瀏覽量
19738 -
VCR
+關(guān)注
關(guān)注
0文章
12瀏覽量
7845
原文標題:干貨 | 創(chuàng)新的長度可變連桿操縱方案
文章出處:【微信號:RichtekTechnology,微信公眾號:立錡科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
深度解析安森美iToF方案

兆易創(chuàng)新人形機器人方案 深度解讀
泰克MDO3014示波器存儲深度詳解

英偉達Cosmos-Reason1 模型深度解讀
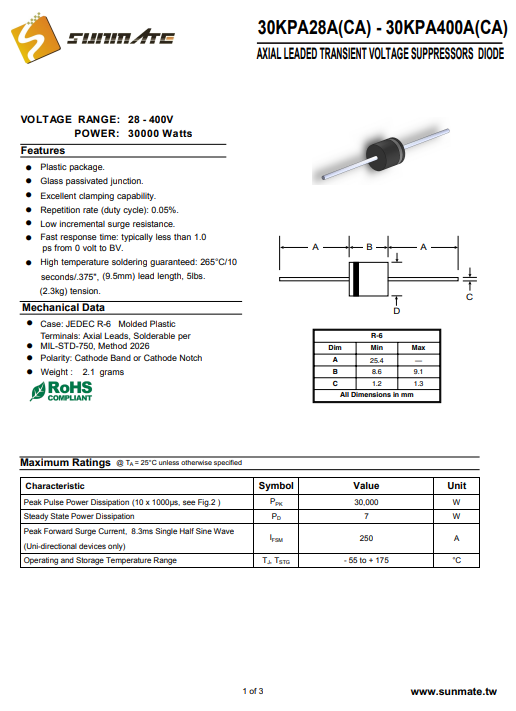
深度解讀 30KPA64A 單向 TVS:64V 擊穿機制與高效防護策略
連桿鍛造中感應加熱及溫料自動分選系統(tǒng)怎么設(shè)計



京準電鐘解讀:子母鐘系統(tǒng)(時鐘系統(tǒng))技術(shù)方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論