") 什么是上位機(jī),什么是下位機(jī)?
什么是上位機(jī),什么是下位機(jī)?
關(guān)于啟程
啟程自動(dòng)化成立于2012年,培訓(xùn)項(xiàng)目主打西門(mén)子PLC編程系統(tǒng)集成、工業(yè)機(jī)器人編程、EPLAN電氣設(shè)計(jì)、視覺(jué)等培訓(xùn)與技術(shù)服務(wù)的機(jī)構(gòu)。
上位機(jī)是指可以直接發(fā)出操控命令的計(jì)算機(jī),
一般是PC/host computer/master computer/upper computer,
屏幕上顯示各種信號(hào)變化(液壓,水位,溫度等)。
下位機(jī)
下位機(jī)是直接控制設(shè)備獲取設(shè)備狀況的計(jì)算機(jī),
一般是PLC/單片機(jī)single chip microcomputer/slave computer/lower computer之類(lèi)的。
工具/原料
計(jì)算機(jī)一臺(tái)
組態(tài)王,PLC
方法/步驟
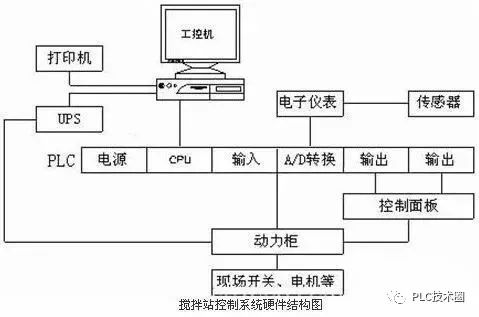
概述:上位機(jī)發(fā)出的命令首先給下位機(jī),下位機(jī)再根據(jù)此命令解釋成相應(yīng)時(shí)序信號(hào)直接控制相應(yīng)設(shè)備。下位機(jī)不時(shí)讀取設(shè)備狀態(tài)數(shù)據(jù)(一般為模擬量),轉(zhuǎn)換成數(shù)字信號(hào)反饋給上位機(jī)。
上下位機(jī)都需要編程,都有專門(mén)的開(kāi)發(fā)系統(tǒng)。
在概念上,控制者和提供服務(wù)者是上位機(jī),被控制者和被服務(wù)者是下位機(jī),也可以理解為主機(jī)和從機(jī)的關(guān)系,但上位機(jī)和下位機(jī)是可以轉(zhuǎn)換的。
工作原理:
兩機(jī)如何通訊,一般取決于下位機(jī),下位機(jī)一般具有更可靠的獨(dú)有通訊協(xié)議;
使用一些新的API(API(Application Programming Interface,應(yīng)用程序編程接口)是一些預(yù)先定義的函數(shù),目的是提供應(yīng)用程序與開(kāi)發(fā)人員基于某軟件或硬件的以訪問(wèn)一組例程的能力;
多語(yǔ)言支持功能模塊,一般同時(shí)支持?jǐn)?shù)種高級(jí)語(yǔ)言為上位機(jī)編程。
通常上位機(jī)和下位機(jī)通訊可以采用不同的通訊協(xié)議,有RS232的串口通訊或者RS485串行通訊。
當(dāng)用計(jì)算機(jī)和PLC通訊的時(shí)候,不但可以采用傳統(tǒng)的D形式的串行通訊,還可以采用更適合工業(yè)控制的雙線的PROFIBUS-DP通訊。采用封裝好的程序開(kāi)發(fā)工具就可以實(shí)現(xiàn)PLC和上位機(jī)的通訊,當(dāng)然可以自己編寫(xiě)驅(qū)動(dòng)類(lèi)的接口協(xié)議控制上位機(jī)和下位機(jī)的通訊。
經(jīng)驗(yàn):
通常工控機(jī),工作站,觸摸屏作為上位機(jī),
通信控制PLC,單片機(jī)等作為下位機(jī),從而控制相關(guān)設(shè)備元件和驅(qū)動(dòng)裝置。
注意事項(xiàng)
上位機(jī)是指可以直接發(fā)出操控命令的計(jì)算機(jī)
下位機(jī)是直接控制設(shè)備獲取設(shè)備狀況的計(jì)算機(jī)
工控機(jī),工作站,觸摸屏作為上位機(jī), 通信控制PLC,單片機(jī)等作為下位機(jī)
責(zé)任編輯:lq
-
編程
+關(guān)注
關(guān)注
88文章
3678瀏覽量
94819 -
自動(dòng)化
+關(guān)注
關(guān)注
29文章
5735瀏覽量
81488 -
上位機(jī)
+關(guān)注
關(guān)注
27文章
957瀏覽量
55539
原文標(biāo)題:搞工控自動(dòng)化的要知道到底什么是上位機(jī),什么是下位機(jī)?
文章出處:【微信號(hào):xue_PLC,微信公眾號(hào):PLC技術(shù)圈】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
英特爾技術(shù)助力Acontis虛擬化負(fù)載整合解決方案
上位機(jī)通信協(xié)議詳解 嵌入式上位機(jī)設(shè)計(jì)流程
上位機(jī)系統(tǒng)架構(gòu)分析 上位機(jī)與下位機(jī)的區(qū)別
上位機(jī)與下位機(jī)實(shí)時(shí)通信的實(shí)現(xiàn)
上位機(jī)與下位機(jī)通信協(xié)議的優(yōu)化策略
ADC靜態(tài)測(cè)試全流程:以斜坡測(cè)試為例(二)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論