") 基于STM32的手勢(shì)控制小車設(shè)計(jì)
基于STM32的手勢(shì)控制小車設(shè)計(jì)

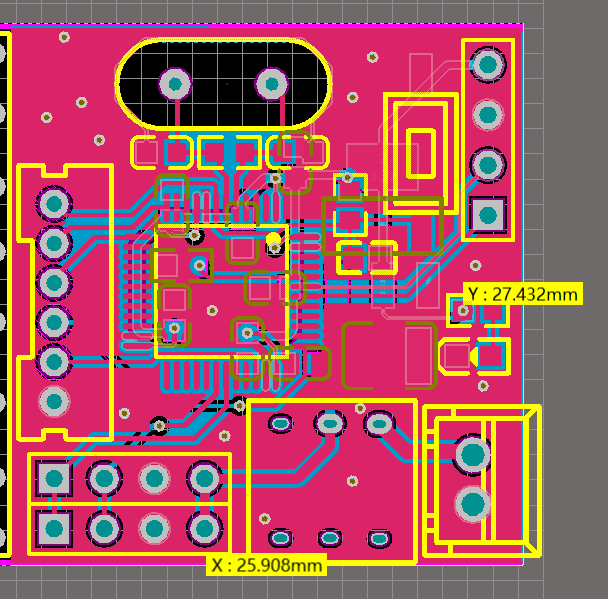
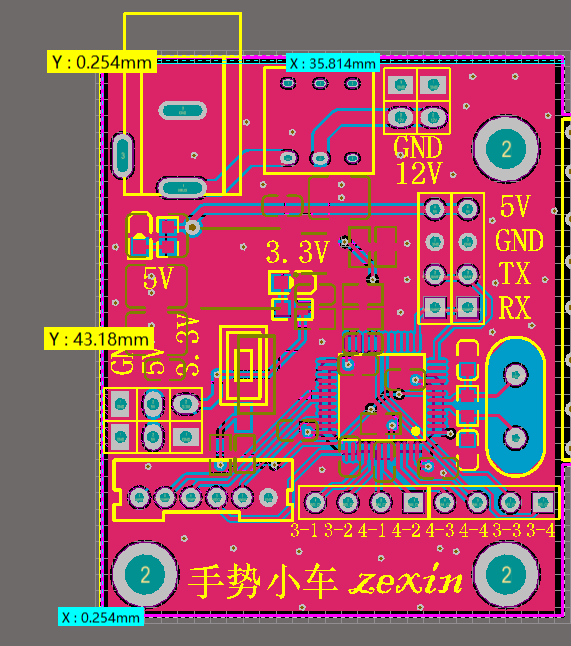
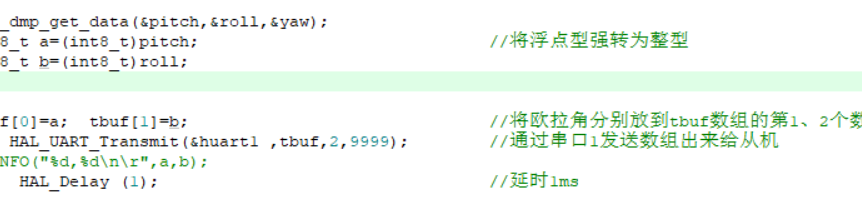
最近要做課設(shè),所以直接做了個(gè)手勢(shì)控制小車。手上有陀螺儀模塊,通過讀取手上模塊的姿態(tài)角變化,再通過無線傳輸給小車上的主控做處理控制車子的移動(dòng)。
責(zé)任編輯:xj
原文標(biāo)題:基于STM32的手勢(shì)控制小車
文章出處:【微信公眾號(hào):電路設(shè)計(jì)技能】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
陀螺儀
+關(guān)注
關(guān)注
44文章
847瀏覽量
100007 -
STM32
+關(guān)注
關(guān)注
2293文章
11032瀏覽量
364786 -
無線傳輸
+關(guān)注
關(guān)注
3文章
592瀏覽量
41704
原文標(biāo)題:基于STM32的手勢(shì)控制小車
文章出處:【微信號(hào):cirmall,微信公眾號(hào):電路設(shè)計(jì)技能】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
基于STM32藍(lán)牙控制小車系統(tǒng)設(shè)計(jì)(硬件+源代碼+論文)下載
基于STM32藍(lán)牙控制小車系統(tǒng)設(shè)計(jì)(硬件+源代碼+論文)推薦下載!
發(fā)表于 05-29 21:45
【每周推薦】基于STM32開發(fā)項(xiàng)目實(shí)例下載(含PCB、原理圖、源碼等)
1、手機(jī)APP遠(yuǎn)程控制,智能家居監(jiān)測(cè)、智能控制系統(tǒng)(含源碼)手機(jī)APP遠(yuǎn)程控制,智能家居監(jiān)測(cè)、智能控制系統(tǒng)(STM32L4、服務(wù)器、安卓源碼

基于STM32藍(lán)牙控制小車系統(tǒng)設(shè)計(jì)(硬件+源代碼+論文) 項(xiàng)目實(shí)例下載
基于STM32藍(lán)牙控制小車系統(tǒng)設(shè)計(jì)(硬件+源代碼+論文) 項(xiàng)目實(shí)例下載!
純分享帖,需要者可點(diǎn)擊附件免費(fèi)獲取完整資料~~~【免責(zé)聲明】本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請(qǐng)第一時(shí)間告知
發(fā)表于 05-23 20:55
【硬核項(xiàng)目】STM32F103 智能小車全棧開發(fā):紅外循跡 / 避障算法 + WiFi 遠(yuǎn)程控制,附原理圖與代碼
今天為大家推薦一款功能強(qiáng)大的STM32多功能智能小車——華清遠(yuǎn)見STM32F103智能云控小車。這款小車集紅外遙控、遠(yuǎn)程物聯(lián)
【零基礎(chǔ)逆襲軟硬件工程師】華清遠(yuǎn)見STM32F103智能小車開發(fā)實(shí)戰(zhàn),手把手帶你從硬件組裝到WiFi遠(yuǎn)程控制,解鎖
STM32F103智能云控小車是由華清遠(yuǎn)見傾力打造的一款多功能智能小車,專為高校教學(xué)、學(xué)生畢業(yè)設(shè)計(jì)、創(chuàng)新競(jìng)賽、單片機(jī)入門學(xué)習(xí)及項(xiàng)目實(shí)踐量身定制。這款小車集紅外遙控、遠(yuǎn)程物聯(lián)網(wǎng)

AGV小車的工作原理是什么?
AGV小車通過導(dǎo)航定位、路徑規(guī)劃、任務(wù)接收與執(zhí)行、運(yùn)動(dòng)控制、安全監(jiān)測(cè)、狀態(tài)監(jiān)測(cè)和電池管理等系統(tǒng)協(xié)同工作,以實(shí)現(xiàn)高效、準(zhǔn)確的物流搬運(yùn)。 1. 導(dǎo)航與定位? AGV小車采用多種導(dǎo)航方式,如磁條導(dǎo)航
自適應(yīng)藍(lán)牙控制智能小車
基于野火Renesas R7FA8D1BH (Cortex?-M85)開發(fā)板,設(shè)計(jì)的一款智能控制小車。其可實(shí)現(xiàn)采集現(xiàn)場(chǎng)環(huán)境的溫度、濕度、光照強(qiáng)度,同時(shí)使用超聲波雷達(dá)掃描環(huán)境的參數(shù),以了解特殊環(huán)境的地形特性
發(fā)表于 10-07 23:08
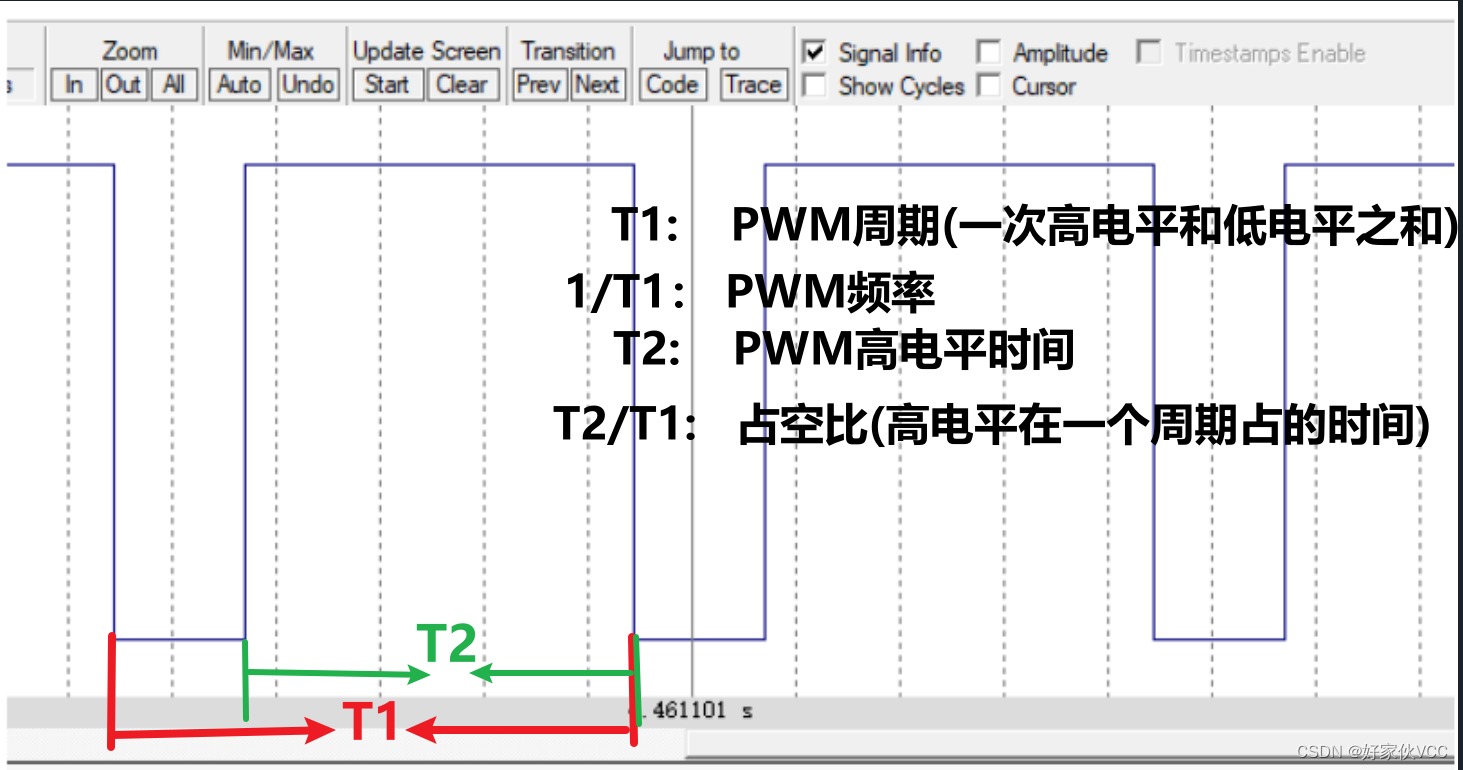
第五章-PWM控制電機(jī) 開源stm32循跡小車詳細(xì)制作過程(附加完全版代碼)
萬字筆記、12多個(gè)小時(shí)視頻、20多章節(jié)代碼手把手教會(huì)你如何開發(fā)和調(diào)試。讓你更快掌握嵌入式系統(tǒng)開發(fā)。**
V3.3.0-STM32智能小車
視頻: https
第13章-循跡功能 STM32智能小車循跡教程 PID循跡算法分析
第13章-循跡功能 循跡小車講解 原理分析 STM32智能小車循跡教程 紅外對(duì)管使用 PID循跡算法分析V3:HAL庫開發(fā)、功能:PID速度控制、PID循跡、PID跟隨、遙控、避障、P

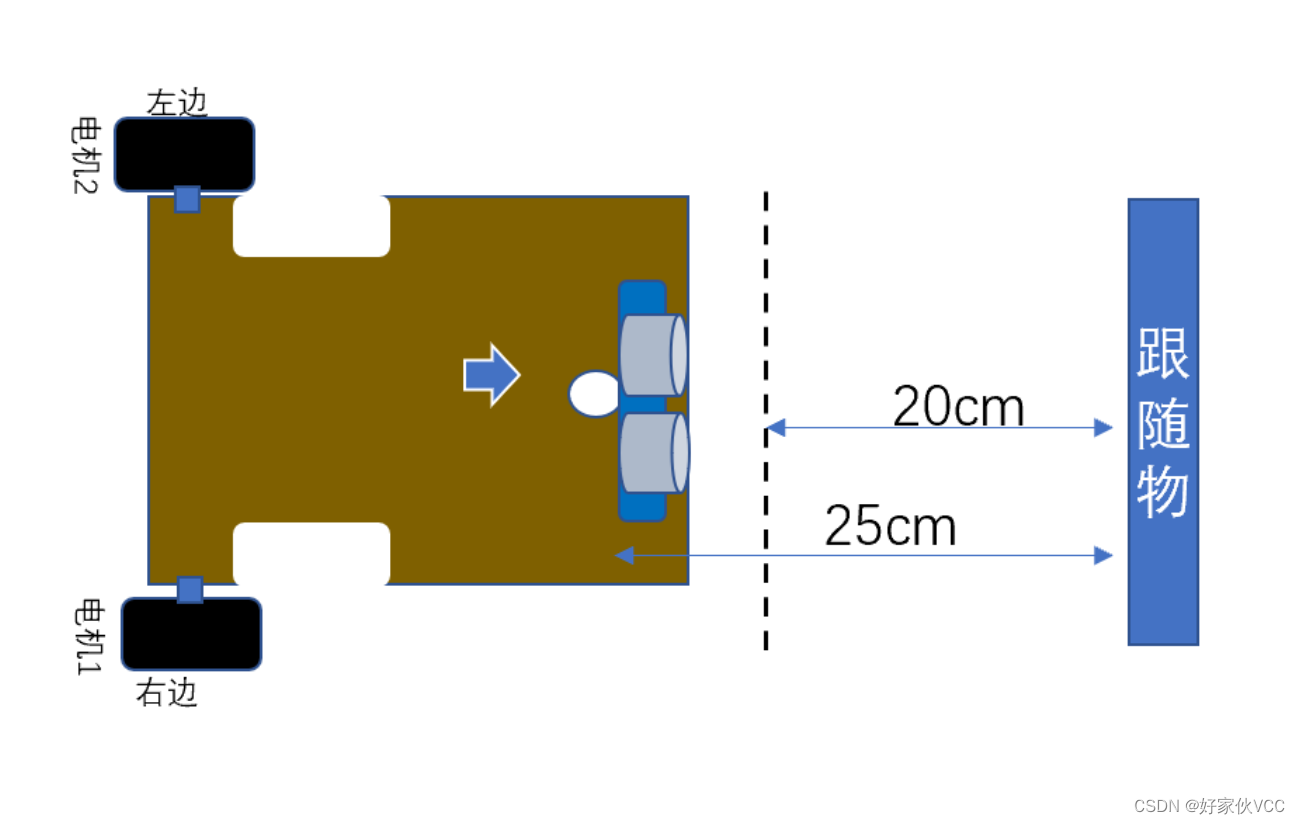
第16章-超聲波跟隨功能 基于STM32的三路超聲波自動(dòng)跟隨小車 畢業(yè)設(shè)計(jì) 課程設(shè)計(jì)
第16章-超聲波跟隨功能 基于STM32的三路超聲波自動(dòng)跟隨小車 畢業(yè)設(shè)計(jì) 課程設(shè)計(jì)
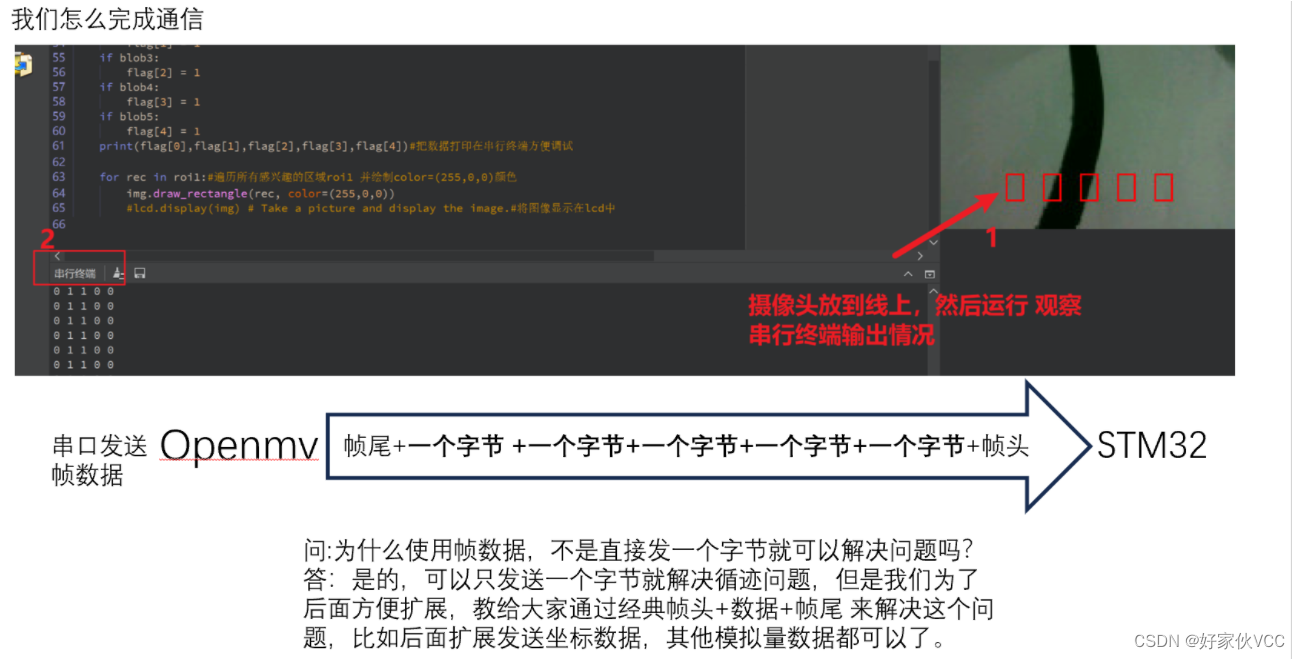
19.3-星曈科技 openmv Hopenmv發(fā)送五個(gè)uchar Openmv+STM32F103C8T6視覺巡線小車 STM32循跡小車系列教程
19.3-【星曈科技】openmv Hopenmv發(fā)送五個(gè)uchar Openmv+STM32F103C8T6視覺巡線小車 STM32循跡小車系列教程 使用OpenMV循跡 openM
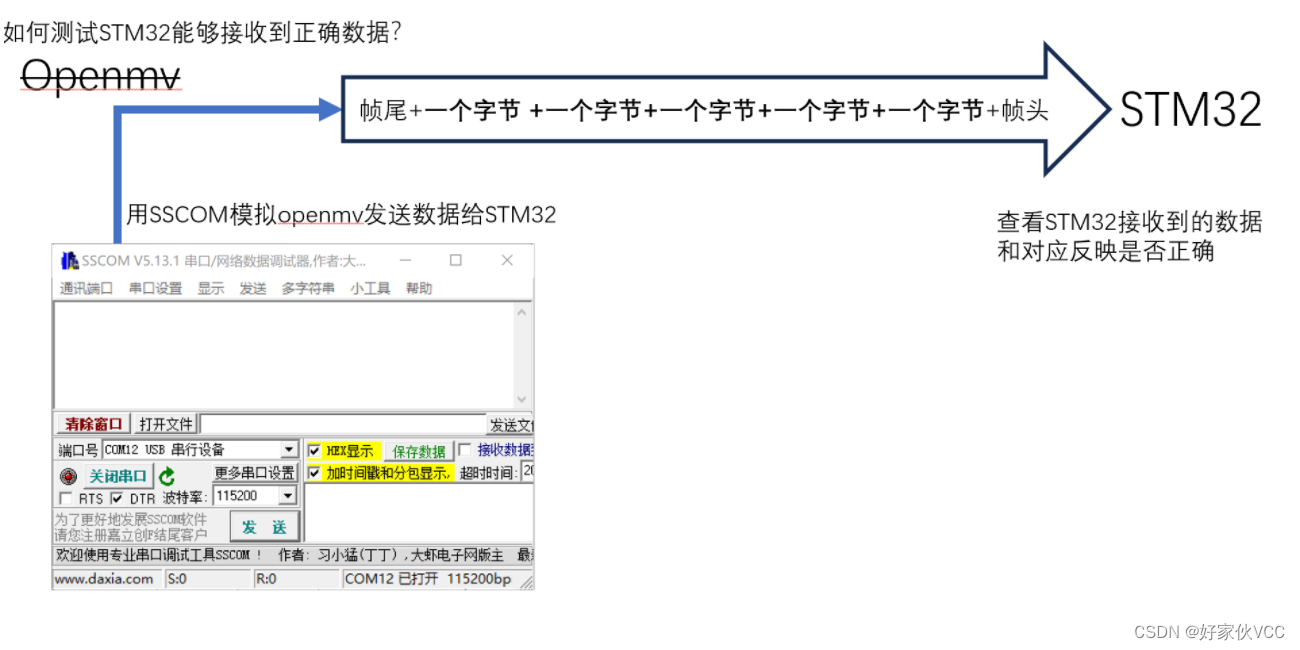
19.4-STM32接收數(shù)據(jù)-狀態(tài)顯示在屏幕 openMV尋跡與小車控制 Openmv+STM32F103C8T6視覺巡線小車
19.4-STM32接收數(shù)據(jù)-狀態(tài)顯示在屏幕 openMV尋跡與小車控制 Openmv+STM32F103C8T6視覺巡線小車
20.3-使用兩個(gè)通道進(jìn)行電磁循跡 智能車競(jìng)賽 電磁桿原理圖 電磁循跡小車 STM32電磁小車 電磁循跡算法
20.3-使用兩個(gè)通道進(jìn)行電磁循跡 智能車競(jìng)賽 電磁桿原理圖 電磁循跡小車 智能車電磁組 STM32電磁小車 電磁循跡小車 電磁循跡算法 智能車環(huán)島 智能車比賽規(guī)則 歸一化處理 差比和

20.2-電磁桿在磁軌道的測(cè)試 零基礎(chǔ)入門智能車競(jìng)賽 STM32電磁小車
20.2-電磁桿在磁軌道的測(cè)試 零基礎(chǔ)入門智能車競(jìng)賽 智能車競(jìng)賽 電磁桿原理圖 電磁循跡小車 智能車電磁組 STM32電磁小車 電磁循跡小車 電磁循跡算法 智能車環(huán)島 智能車比賽規(guī)則

第七章-V1.5 STM32超聲波測(cè)距STM32F103C8t6超聲波避障小車 超聲波避障模塊 STM32超聲波測(cè)距
5STM32超聲波測(cè)距STM32F103C8t6超聲波避障小車






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論