 嵌入式軟件底層開發的框架陳述
嵌入式軟件底層開發的框架陳述

在底層代碼編寫中,初始的框架設計總會面臨選擇,針對實際的硬件使用環境,大家對于使用的軟件框架有很多選擇,今天我簡單描述一些比較常用的架構,讓大家能夠理解并選擇合適的架構。
總述
1. 簡單的順序執行程序:這類寫法是大多數人使用的方法,不需用思考程序的具體架構,直接按照執行順序編寫應用程序即可。
2.前后臺執行程序:在順序執行的情況上增添中斷前臺處理機制,配置順序執行的后臺大循環程序,組合成可以實時響應的程序。
3. 時間片輪循法:在前后臺的執行架構上,通過計數器進一步規劃程序,定時執行特定的片段。
4. 實時操作系統:實時操作系統又叫RTOS,實時性,RTOS的內核負責管理所有的任務,內核決定了運行哪個任務,何時停止當前任務切換到其 他任務,這個是內核的多任務管理能力。多任務 管理給人的感覺就好像芯片有多個CPU,多任務管理實現了CPU資源的最大化利用,多任務管理有助于實現程序的模塊化開發,能夠實現復雜的實時應用。
除了實時性,還有可剝奪內核,顧名思義就是可以剝奪其他任務的CPU使用權,它總是運行就緒任務中的優先級最高的那個任務。
1.簡單的順序執行程序
這種應用程序比較簡單,一般作為初階簡單使用,實時性以及要求不太高的情況下,可以使用。程序的設計比較簡單,思路比較清晰。但是主循環的邏輯比較復雜的時候,如果沒有完整的流程圖指導,其他人很難看懂程序運行邏輯。
下面寫一個順序執行的程序模型
int main(void) { uint8 TaskValue; InitSys(); // 初始化 while (1) { TaskValue= GetTaskValue(); switch (TaskValue) { case x: TaskDispStatus(); break; 。。. default: break; } } }
2.前后臺執行程序
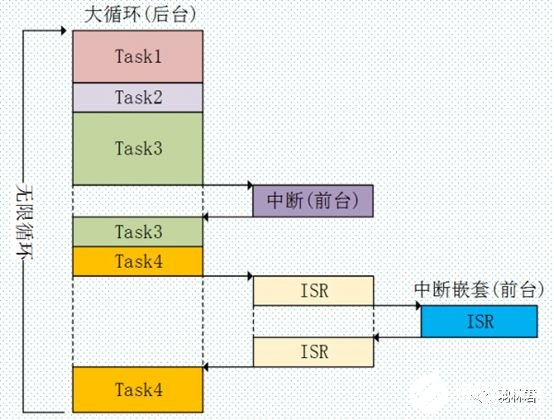
這種程序特點是,后臺大循環中一直執行默認的程序,中斷服務程序(ISR)產生相應中斷標記,主程序運行與中斷標記相關聯的任務程序。一般實現有如下思路:
通過設置標志變量,然后在前臺響應中斷的時候進行對標志變量的置位或者復位,實現事件的信號獲取,再在后臺主循環進行中斷所對應事物或者數據的處理,將程序流程轉移到主程序。
前后臺執行的程序
void IRQHandler(void){ if(GetITStatus == 1) { SysFlag = 1; GetITStatus = 0; }}int main(void) { uint8 TaskValue; InitSys(); // 初始化 while (1) { TaskValue= GetTaskValue(); switch (TaskValue) { case x: if(SysFlag == 1) { TaskDispStatus(); SysFlag == 0; } break; 。。. default: break; } } }
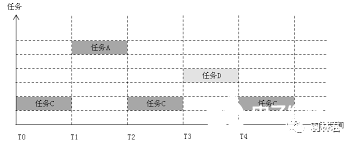
3.時間片輪循架構
時間片輪循法,大家看到它的時候,一般會將它與操作系統進行比較。不是說操作系統包含這種方法,而是在前后臺程序中配合時間管理形成時間片輪循架構。
這種架構已經最大限度接近RTOS,時間管理,中斷管理,任務管理,已經都有了,只不過RTOS會對內核進行更深入的修改,有針對delay延時的線程切換,搶占式任務切換這些更為復雜一些的功能等。
時間片輪循程序
時間片管理主要是通過對定時多處復用,在定時器計數,定時進行標志位的變化,繼而主程序對標志真假的判斷,實現不同時間不同任務狀態執行。
因為此架構代碼比較好,我適當進行詳細描述。
step
1:初始化相應的定時器:注意設置定時器的間隔頻率,可以按照芯片的性能設置。例如,設置定時中斷為1ms,也可以設置為10ms,輪循架構中的定時器部分與操作系統的定時器部分具有一樣的功能,中斷過于頻繁,影響主程的序執行效率;中斷間隔過長,實時響應效果差。
2:針對定時器運行的任務設置一個函數結構體標志,用來在定時程序進行時間計數以及標志操作。
#define TaskTAB_NUM 6 //任務數量__packed typedef struct{ u8 flag; //定時標志 u32 numcount;//按照定時中斷進行計數 u32 target; //設置的定時目標數值 int(*fun)(void);//設置定時執行的目標任務函數}TaskTimTypeDef
step
3:建立一個任務表,通過結構體表的設置,確定任務執行的時間表。
在定義變量時,我們已經初始化了值,這些值的初始化,非常重要,跟具體的執行時間優先級等都有關系,這個需要自己掌握。
/*MdmSendTimTab任務函數默認周期,單位5ms,TIM7*/static TaskTimTypeDef TaskTimTab[TaskTAB_NUM] ={ {1, 0, 30000, *Task00}, //Task00 3000數值是設置的定時目標值,如果覺得反應過慢,可以將此值設置小 {1, 0, 3000, *Task01}, //Task01 {1, 0, 300, *Task02}, //Task02 {1, 0, 30, *Task03}, //Task03 {1, 0, 3, *Task04}, //Task04 {1, 0, 0xFFFFFFFF, *Task05}, //Task05 //可以按照TaskTAB_NUM數量添加任務};int Task00(void)//按照結構體的函數模板(int(*fun)(void);)寫任務函數{。。.}//假設執行按鍵操作int Task01(void){。。.}//假設執行USART發送任務int Task02(void){。。.}//假設執行CAN通訊int Task03(void){。。.}//假設執行繼電器控制int Task04(void){。。.}//假設執行網絡解析int Task06(void){。。.}//假設執行空
step
4:定時中斷服務函數,按照我們需要的時間以及標志操作進行計時。
//定時中斷服務函數 void TimerInterrupt(void) { for(char i=0; i《TaskTAB_NUM; i++) { if(TaskTimTab[i].flag == 1) { (TaskTimTab[i].numcount《 TaskTimTab[i].target)//比較目前定時計數與目標時間 ?(TaskTimTab[i].numcount++):(TaskTimTab[i].flag = 0); } } }
step
5:主函數進行任務函數執行。
int main(void) { InitSys(); // 初始化 while (1) { for(char i=0; i《TaskTAB_NUM; i++)//// 任務處理 { if(TaskTimTab[i].flag == 0) { if(TaskTimTab.flag == 0) { TaskTimTab[i].flag = 1; TaskTimTab[i].numcount= 0; TaskTimTab[i].fun(); } } } }
4.操作系統RTOS
嵌入式操作系統是更加優化的執行框架,針對多任務,功能復雜,擴展性要求強項目的代碼有非常好的使用。RTOS是針對不同處理器優化設計的高效率實時多任務內核,RTOS可以面對幾十個系列的嵌入式處理器MPU、MCU、DSP、SOC等提供類同的API接口,這是RTOS基于設備獨立的應用程序開發基礎。因此,基于RTOS的C語言程序具有極大的可移植性。目前針對微嵌入式或者單片機的操作系統有VxWorks、UCOS、Free RTOS、國產的RTT,這些操作系統大同小異,基本的功能都類似:任務管理、任務間同步和通信、內存管理、實時時鐘服務、中斷管理服務。
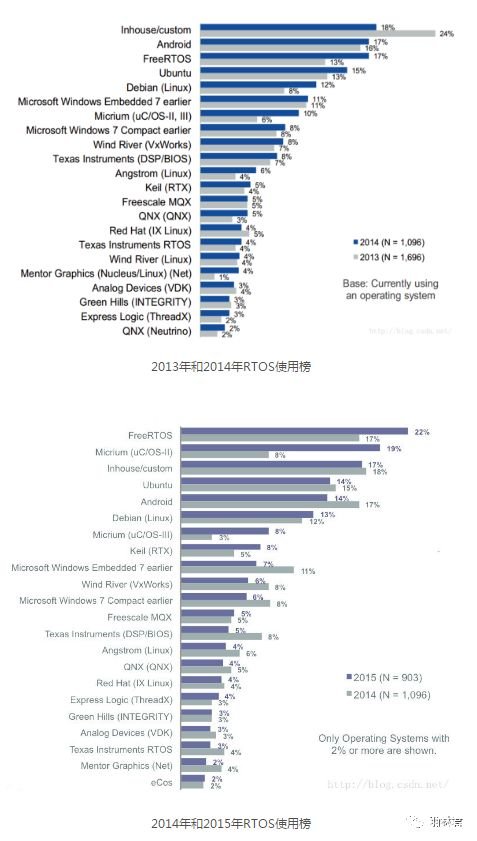
(圖片來源博客)
RTOS在時間輪循的架構上繼續增加了任務掛起以及恢復,阻塞切換線程等,屬于功能累加,進一步的優化。由于本次不是對RTOS的講解,本人學習應用有UCOS、RTT、Free RTOS幾個操作系統,因為篇幅有限,時間有限,我抽時間再進行詳細的RTOS系統架構學習等的介紹。
目前RTOS系統有很多,很多項目都傾向于使用RTOS,但是通過幾種架構的分析明白不同的項目需要不同的架構,并不是所有項目都需要,也都適合使用RTOS,例如項目中各個任務耦合性過大,如果用RTOS需要很多的任務同步,甚至都無法進行線程的規劃。這樣就完全失去RTOS意義,此時用某些裸機的架構反而更合適。
責任編輯:haq
-
嵌入式
+關注
關注
5150文章
19660瀏覽量
317405 -
軟件
+關注
關注
69文章
5152瀏覽量
89207
發布評論請先 登錄
嵌入式軟件開發常用的軟件有哪些?
硬核升級!華清遠見STM32MP157驅動開發課程助力嵌入式Linux底層開發入門進階
嵌入式主板開發詳細指南

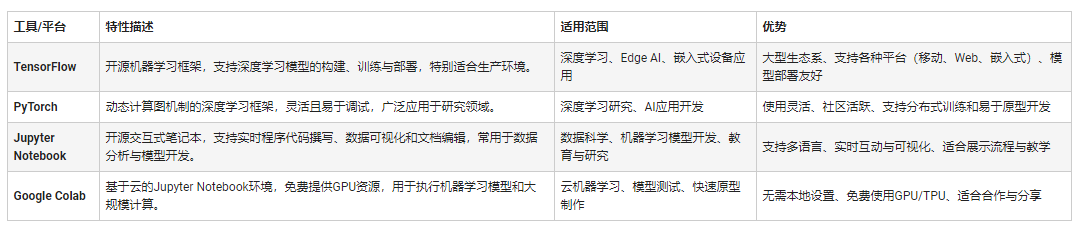
嵌入式機器學習的應用特性與軟件開發環境
嵌入式系統開發與硬件的關系 嵌入式系統開發常見問題解決
一文了解嵌入式軟件開發的對象
七大嵌入式GUI盤點
嵌入式linux開發的基本步驟有哪些?
嵌入式linux開發板芯片的工作原理
AWFlow:內置豐富的功能節點,簡化嵌入式開發流程

嵌入式軟件開發與AI整合






 工商網監
工商網監
評論