 FreeRTOS基礎及其應用
FreeRTOS基礎及其應用
嵌入式系統不只是ARM+Linux,不是只有安卓,凡是電子產品都可稱為嵌入式系統。物聯網行業的興起,也提升了FreeRTOS市場占有率。本文就是介紹FreeRTOS基礎及其應用,只是個人整理,可能存在問題,其目的只是簡要介紹系統的基礎,只能作為入門資料。
一、 為什么要學習 RTOS
進入嵌入式這個領域,入門首先接觸的是單片機編程,尤其是C51 單片機來,基礎的單片機編程通常都是指裸機編程,即不加入任何 RTOS(Real Time Operating System 實時操作系統)。常用的有國外的FreeRTOS、μC/OS、RTX 和國內的 RT-thread、Huawei LiteOS 和 AliOS-Things 等,其中開源且免費的 FreeRTOS 的市場占有率較高。
1.1前后臺系統
在裸機系統中,所有的操作都是在一個無限的大循環里面實現,支持中斷檢測。外部中斷緊急事件在中斷里面標記或者響應,中斷服務稱為前臺,main 函數里面的while(1)無限循環稱為后臺,按順序處理業務功能,以及中斷標記的可執行的事件。小型的電子產品用的都是裸機系統,而且也能夠滿足需求。
1.2多任務系統
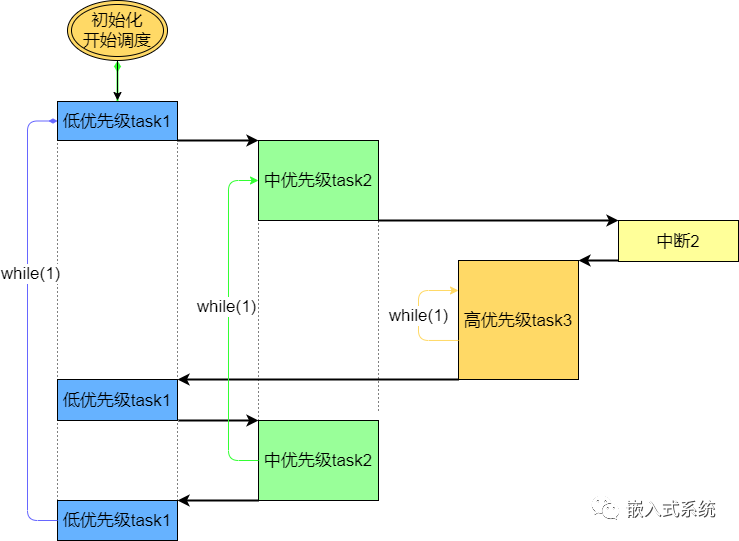
多任務系統的事件響應也是在中斷中完成的,但是事件的處理是在任務中完成的。如果事件對應的任務的優先級足夠高,中斷對應的事件會立刻執行。相比前后臺系統,多任務系統的實時性又被提高了。
在多任務系統中,根據程序的功能,把這個程序主體分割成一個個獨立的,無限循環且不能返回的子程序,稱之為任務。每個任務都是獨立的,互不干擾的,且具備自身的優先級,它由操作系統調度管理。加入操作系統后,開發人員不需要關注每個功能模塊之間的沖突,重心放在子程序的實現。缺點是整個系統隨之帶來的額外RAM開銷,但對目前的單片機的來影響不大。
1.3學習RTOS的意義
學習 RTOS,一是項目需要,隨著產品要實現的功能越來越多,單純的裸機系統已經不能完美地解決問題,反而會使編程變得更加復雜,如果想降低編程的難度,就必須引入 RTOS實現多任務管理。二是技能需要,掌握操作系統,和基于RTOS的編程,實現更好的職業規劃,對個人發展尤其是錢途是必不可少的。
以前一直覺得學操作系統就必須是linux,實際每個系統都有其應用場景,對于物聯網行業,殺雞焉用牛刀,小而美,且應用廣泛的FreeRTOS 是首選。有一個操作系統的基礎,即使后續基于其他系統開發軟件,也可觸類旁通,對新技術快速入門。目前接觸的幾款芯片都是基于FreeRTOS。
如何學習RTOS?最簡單的就是在別人移植好的系統之上,看看 RTOS 里面的 API 使用說明,然后調用這些 API 實現自己想要的功能即可。完全不用關心底層的移植,這是最簡單快速的入門方法。這種學習方式,如果是做產品,可以快速的實現功能,弊端是當程序出現問題的時候,如果對RTOS不夠了解,會導致調試困難,無從下手。
各種RTOS內核實現方式都差不多,我們只需要深入學習其中一款就行。萬變不離其宗,正如掌握了C51基礎,后續換其他型號或者更高級的ARM單片機,在原理和方法上,都是有借鑒意義,可以比較快的熟悉并掌握新單片機的使用。
二、 操作系統基礎
2.1鏈表
鏈表作為 C 語言中一種基礎的數據結構,在平時寫程序的時候用的并不多,但在操作系統里面使用的非常多。FreeRTOS 中存在著大量的基礎數據結構鏈表和鏈表項的操作(list 和 list item)。FreeRTOS 中與鏈表相關的操作均在 list.h 和 list.c 這兩個文件中實現。

鏈表比數組,最大優勢是占用的內存空間可以隨著需求擴大或縮小,動態調整。實際FreeRTOS中各種任務的記錄都是依靠鏈表動態管理,具體的可以參考源碼的任務控制塊tskTCB。任務切換狀態,就是將對應的鏈表進行操作,鏈表操作涉及創建和插入、刪除和查找。
2.2隊列
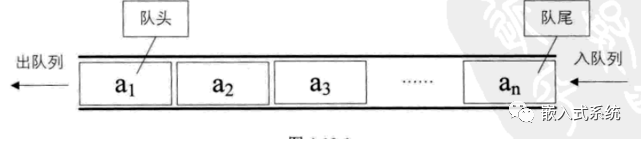
隊列是一種只允許在表的前端(front)進行刪除操作,而在表的后端(rear)進行插入操作。隊尾放入數據,對頭擠出。先進先出,稱為FIFO
2.3任務
在裸機系統中,系統的主體就是 main 函數里面順序執行的無限循環,這個無限循環里面 CPU 按照順序完成各種事情。在多任務系統中,根據功能的不同,把整個系統分割成一個個獨立的且無法返回的函數,這個函數我們稱為任務。系統中的每一任務都有多種運行狀態。系統初始化完成后,創建的任務就可以在系統中競爭一定的資源,由內核進行調度。
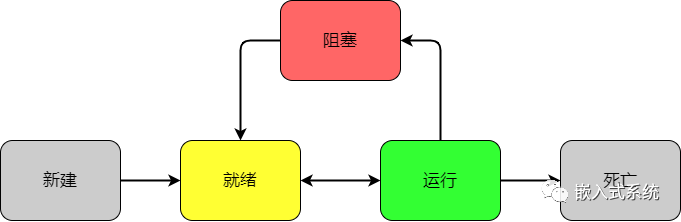
?就緒(Ready):該任務在就緒列表中,就緒的任務已經具備執行的能力,只等待調度器進行調度,新創建的任務會初始化為就緒態。
?運行(Running):該狀態表明任務正在執行,此時它占用處理器,調度器選擇運行的永遠是處于最高優先級的就緒態任務。
?阻塞(Blocked):任務當前正在等待某個事件,比如信號量或外部中斷。
?掛起態(Suspended):處于掛起態的任務對調度器而言是不可見的。
掛起態與阻塞態的區別,當任務有較長的時間不允許運行的時候,我們可以掛起任務,這樣子調度器就不會管這個任務的任何信息,直到調用恢復任務的 接口;而任務處于阻塞態的時候,系統還需要判斷阻塞態的任務是否超時,是否可以解除阻塞。
各任務運行時使用消息、信號量等方式進行通信,不能是全局變量。任務通常會運行在一個死循環中,不會退出,如果不再需要,可以調用刪除任務。
2.4臨界區
臨界區就是一段在執行的時候不能被中斷的代碼段。在多任務操作系統里面,對全局變量的操作不能被打斷,不能執行到一半就被其他任務再次操作。一般被打斷,原因就是系統調度或外部中斷。對臨界區的保護控制,歸根到底就是對系統中斷的使能控制。在使用臨界區時,關閉中斷響應,對部分優先級的中斷進行屏蔽,因此臨界區不允許運行時間過長。為了對臨界區進行控制,就需要使用信號量通信,實現同步或互斥操作。
三、初識 FreeRTOS
3.1FreeRTOS源碼
FreeRTOS 由美國的 Richard Barry 于 2003 年發布, 2018 年被亞馬遜收購,改名為 AWS FreeRTOS,版本號升級為 V10,支持MIT開源協議,亞馬遜收購 FreeRTOS 也是為了進入物聯網和人工智能,新版本增加了物聯網行業的網絡協議等功能。
FreeRTOS 是開源免費的,可從官網 www.freertos.org 下載源碼和說明手冊。例如展銳的UIS8910使用的是V10。以FreeRTOSv10.4.1為例,包含 Demo 例程,Source內核的源碼,License許可文件。
3.1.1Source 文件夾
FreeRTOS/ Source 文件夾下的文件:
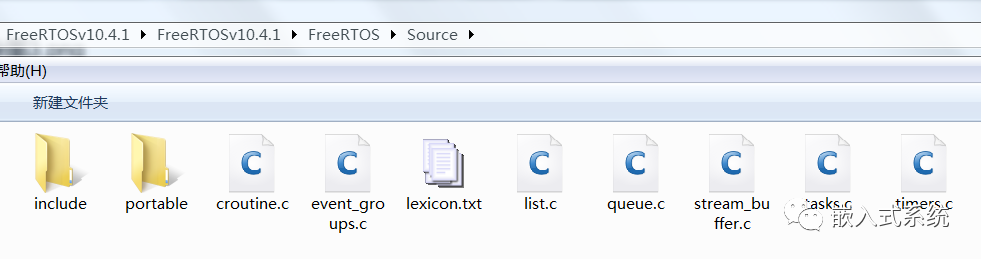
包括FreeRTOS 的通用的頭文件include和 C 文件,包括任務、隊列、定時器等,適用于各種編譯器和處理器,是通用的。
需要特殊處理適配的在portblle文件夾,其下內容與編譯器和處理器相關, FreeRTOS 要想運行在一個單片機上面,它們就必須關聯在一起,通常由匯編和 C 聯合編寫。通常難度比較高,不過一般芯片原廠提供移植好的接口文件。這里不介紹移植的方法,因為自己也不明白。
Portblle/MemMang 文件夾下存放的是跟內存管理相關的,總共有五個 heap 文件,有5種內存動態分配方式,一般物聯網產品選用 heap4.c 。
3.1.2Demo 文件夾
里面包含了 FreeRTOS 官方為各個單片機移植好的工程代碼,FreeRTOS 為了推廣自己,會給針對不同半導體廠商的評估板實現基礎功能范例, Demo下就是參考范例。
3.1.3FreeRTOSConfig.h配置
FreeRTOSConfig.h頭文件對FreeRTOS 所需的功能的宏均做了定義,需要根據應用情況配置合適的參數,其作用類似MTK功能機平臺的主mak文件,部分定義如下:
1.#defineconfigUSE_PREEMPTION1 2.#defineconfigUSE_IDLE_HOOK0 3.#defineconfigUSE_TICK_HOOK0 4.#defineconfigCPU_CLOCK_HZ(SystemCoreClock) 5.#defineconfigTICK_RATE_HZ((TickType_t)1000)
例如系統時鐘tick等參數在就這個文件配置,具體作用可以看注釋。一般情況下使用SDK不需要改動,特殊情況下咨詢原廠再調整。
3.2FreeRTOS 編碼規范
接觸一個新平臺或者SDK,明白它的編碼規范,文件作用,可以提高源碼閱讀效率,快速熟悉其內部實現。
3.2.1數據類型
FreeRTOS針對不同的處理器,對標準C的數據類型進行了重定義。
1.#defineportCHARchar 2.#defineportFLOATfloat 3.#defineportDOUBLEdouble 4.#defineportLONGlong 5.#defineportSHORTshort 6.#defineportSTACK_TYPEuint32_t 7.#defineportBASE_TYPElong
應用編碼中,推薦使用的是下面這種風格。
1.typedefintint32_t; 2.typedefshortint16_t; 3.typedefcharint8_t; 4.typedefunsignedintuint32_t; 5.typedefunsignedshortuint16_t; 6.typedefunsignedcharuint8_t;
3.2.2變量名
FreeRTOS 中,定義變量的時候往往會把變量的類型當作前綴,好處看到就知道其類型。
char 型變量的前綴是 c
short 型變量的前綴是 s
long 型變量的前綴是 l
復雜的結構體,句柄等定義的變量名的前綴是 x
變量是無符號型的再加前綴 u,是指針變量則加前綴 p
3.2.3函數名
函數名包含了函數返回值的類型、函數所在的文件名和函數的功能,如果是私有的函數則會加一個 prv(private)的前綴。
例如vTaskPrioritySet()函數的返回值為 void 型,在 task.c 這個文件中定義。
3.2.4宏
宏內容是由大寫字母表示,前綴是小寫字母,表示該宏在哪個頭文件定義,如:
1.#definetaskYIELD()portYIELD()
表示該宏是在task.h。
3.2.5個人解讀
1、編碼不缺編碼規范,但是實際使用中很難完全依照標準執行,即使freeRTOS源碼也是如此。
2、關于函數或者宏定義中帶文件名的作用,使用Source Insight 編輯代碼,該前綴的意義不大。
3、規則是活的,只要所有人都按一個規則執行,它就是標準。
3.3FreeRTOS應用開發
關于freeRTOS的應用開發,主要是任務的創建和調度,任務間的通信與同步,涉及隊列、信號量等操作系統通用接口。結合應用需求,涉及定時器、延時、中斷控制等接口。
特別說明,有些功能的實現方式有多種形式,只針對常用方式進行說明,例如task的創建,只說明動態創建方式,因為很少使用靜態方式。
四、任務
4.1創建任務
xTaskCreate()使用動態內存的方式創建一個任務。
1.ret=xTaskCreate((TaskFunction_t)master_task_main,/*任務入口函數*/(1) 2.“MASTER”,/*任務名字*/(2) 3.64*1024,/*任務棧大小*/(3) 4.NULL,,/*任務入口函數參數*/(4) 5.TASK_PRIORITY_NORMAL,/*任務的優先級*/(5) 6.&task_master_handler);/*任務控制塊指針*/(6)
創建任務就是軟件運行時的一個while(1)的入口,一般閱讀其他代碼,找到這個函數,再跟蹤到任務入口函數,學習基于freeRTOS系統的代碼,首先就是找到main和這個接口。
(1):任務入口函數,即任務函數的名稱,需要我們自己定義并且實現。
(2):任務名字,字符串形式,最大長度由FreeRTOSConfig.h 中定義的 configMAX_TASK_NAME_LEN 宏指定,多余部分會被自動截掉,只是方便調試。
(3):任務堆棧大小,單位為字, 4 個字節,這個要注意,否則系統內存緊缺。
(4):任務入口函數形參,不用的時候配置為 0 或者NULL 即可。
(5) :任務的優先級,在 FreeRTOS 中,數值越大優先級越高,0代表最低優先級。基于其SDK開發,可將自定義的所有業務功能task設為同一個優先級,按時間片輪詢調度。
(6):任務控制塊指針,使用動態內存的時候,任務創建函數xTaskCreate()會返回一個指針指向任務控制塊,也可以設為NULL,因為任務句柄后期可以不使用。
4.2開啟調度
當任務創建成功后處于就緒狀態(Ready),在就緒態的任務可以參與操作系統的調度。操作系統任務調度器只啟動一次,之后就不會再次執行了,FreeRTOS 中啟動任務調度器的函數是 vTaskStartScheduler(),并且啟動任務調度器的時候就不會返回,從此任務管理都由FreeRTOS 管理,此時才是真正進入實時操作系統中的第一步。
vTaskStartScheduler開啟調度時,順便會創建空閑任務和定時器任務。
FreeRTOS 為了任務啟動和任務切換使用了三個異常:SVC、PendSV 和SysTick。
SVC(系統服務調用,亦簡稱系統調用)用于任務啟動。
PendSV(可掛起系統調用)用于完成任務切換,它是可以像普通的中斷一樣被掛起的,它的最大特性是如果當前有優先級比它高的中斷在運行,PendSV會延遲執行,直到高優先級中斷執行完畢,這樣產生的PendSV 中斷就不會打斷其他中斷的運行。
SysTick 用于產生系統節拍時鐘,提供一個時間片,如果多個任務共享同一個優先級,則每次 SysTick 中斷,下一個任務將獲得一個時間片。
FreeRTOS 中的任務是搶占式調度機制,高優先級的任務可打斷低優先級任務,低優先級任務必須在高優先級任務阻塞或結束后才能得到調度。相同優先級的任務采用時間片輪轉方式進行調度(也就是分時調度),時間片輪轉調度僅在當前系統中無更高優先級就緒任務存在的情況下才有效。
4.3啟動方式
FreeRTOS有兩種啟動方式,效果一樣,看個人喜好。
第一種:main 函數中將硬件初始化, RTOS 系統初始化,所有任務的創建完成,最后一步開啟調度。目前看到的幾個芯片SDK都是這種方式。
第二種:main 函數中將硬件和 RTOS 系統先初始化好,只創建一個任務后就啟動調度器,然后在這個任務里面創建其它應用任務,當所有任務都創建成功后,啟動任務再把自己刪除。
4.4任務創建源碼分析
xTaskCreate()創建任務。
1.BaseType_txTaskCreate(TaskFunction_tpxTaskCode, 2.constchar*constpcName,/*lint!e971Unqualifiedchartypesareallowedforstringsandsinglecharactersonly.*/ 3.constconfigSTACK_DEPTH_TYPEusStackDepth, 4.void*constpvParameters, 5.UBaseType_tuxPriority, 6.TaskHandle_t*constpxCreatedTask) 7.{ 8.TCB_t*pxNewTCB; 9.BaseType_txReturn; 10. 11./*IfthestackgrowsdownthenallocatethestackthentheTCBsothestack 12.*doesnotgrowintotheTCB.Likewiseifthestackgrowsupthenallocate 13.*theTCBthenthestack.*/ 14.#if(portSTACK_GROWTH>0) 15.{ 16./**/ 17.} 18.#else/*portSTACK_GROWTH*/ 19.{ 20.StackType_t*pxStack; 21. 22./*Allocatespaceforthestackusedbythetaskbeingcreated.*/ 23.pxStack=pvPortMalloc((((size_t)usStackDepth)*sizeof(StackType_t)));/*lint!e9079AllvaluesreturnedbypvPortMalloc()haveatleastthealignmentrequiredbytheMCU'sstackandthisallocationisthestack.*/ 24. 25.if(pxStack!=NULL) 26.{ 27./*AllocatespacefortheTCB.*/ 28.pxNewTCB=(TCB_t*)pvPortMalloc(sizeof(TCB_t));/*lint!e9087!e9079AllvaluesreturnedbypvPortMalloc()haveatleastthealignmentrequiredbytheMCU'sstack,andthefirstmemberofTCB_tisalwaysapointertothetask'sstack.*/ 29. 30.if(pxNewTCB!=NULL) 31.{ 32./*StorethestacklocationintheTCB.*/ 33.pxNewTCB->pxStack=pxStack; 34.} 35.else 36.{ 37./*ThestackcannotbeusedastheTCBwasnotcreated.Free 38.*itagain.*/ 39.vPortFree(pxStack); 40.} 41.} 42.else 43.{ 44.pxNewTCB=NULL; 45.} 46.} 47.#endif/*portSTACK_GROWTH*/ 48. 49.if(pxNewTCB!=NULL) 50.{ 51.#if(tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE!=0)/*lint!e9029!e731Macrohasbeenconsolidatedforreadabilityreasons.*/ 52.{ 53./*Taskscanbecreatedstaticallyordynamically,sonotethis 54.*taskwascreateddynamicallyincaseitislaterdeleted.*/ 55.pxNewTCB->ucStaticallyAllocated=tskDYNAMICALLY_ALLOCATED_STACK_AND_TCB; 56.} 57.#endif/*tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE*/ 58. 59.prvInitialiseNewTask(pxTaskCode,pcName,(uint32_t)usStackDepth,pvParameters,uxPriority,pxCreatedTask,pxNewTCB,NULL); 60.prvAddNewTaskToReadyList(pxNewTCB);//將新任務加入到就緒鏈表候著 61.xReturn=pdPASS; 62.} 63.else 64.{ 65.xReturn=errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY; 66.} 67. 68.returnxReturn; 69.}
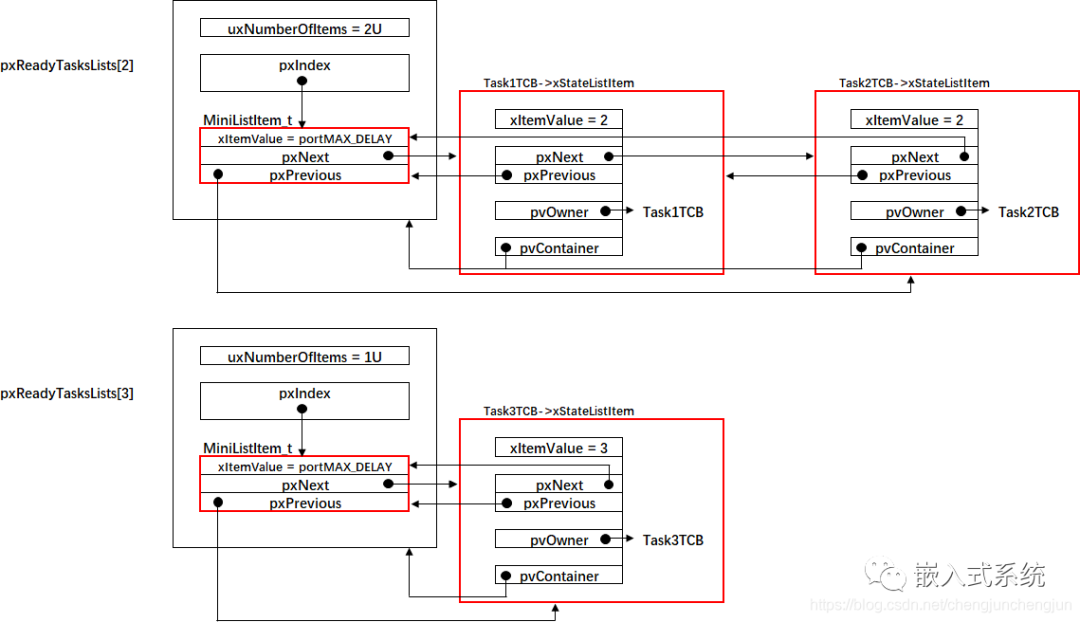
申請任務控制塊內存,檢查配置參數,初始化,將任務信息加入到就緒鏈表,等待調度。前面鏈表部分提到,freeRTOS的任務信息都是使用鏈表記錄,在task.c有
1.PRIVILEGED_DATAstaticList_tpxReadyTasksLists[configMAX_PRIORITIES];//就緒 2.PRIVILEGED_DATAstaticList_txDelayedTaskList1;//延時 3.PRIVILEGED_DATAstaticList_txDelayedTaskList2; 4.PRIVILEGED_DATAstaticList_txPendingReadyList;//掛起 5.PRIVILEGED_DATAstaticList_txSuspendedTaskList;//阻塞
分別記錄就緒態、阻塞態和掛起的任務,其中阻塞態有2個,是因為特殊考慮,時間溢出 的問題,實際開發單片機項目計時超過24h的可以借鑒。其中pxReadyTasksLists鏈表數組,其下標就是任務的優先級。
4.5任務調度源碼分析
創建完任務的時候,vTaskStartScheduler開啟調度器,空閑任務、定時器任務也是在開啟調度函數中實現的。
為什么要空閑任務?因為 FreeRTOS一旦啟動,就必須要保證系統中每時每刻都有一個任務處于運行態(Runing),并且空閑任務不可以被掛起與刪除,空閑任務的優先級是最低的,以便系統中其他任務能隨時搶占空閑任務的 CPU 使用權。這些都是系統必要的東西,也無需自己實現。
1.voidvTaskStartScheduler(void) 2.{ 3.BaseType_txReturn; 4. 5./*Addtheidletaskatthelowestpriority.*/ 6.#if(configSUPPORT_STATIC_ALLOCATION==1) 7.{ 8./***/ 9.} 10.#else/*if(configSUPPORT_STATIC_ALLOCATION==1)*/ 11.{ 12./*創建空閑任務*/ 13.xReturn=xTaskCreate(prvIdleTask, 14.configIDLE_TASK_NAME, 15.configMINIMAL_STACK_SIZE, 16.(void*)NULL, 17.portPRIVILEGE_BIT,//優先級為0 18.&xIdleTaskHandle); 19.} 20.#endif/*configSUPPORT_STATIC_ALLOCATION*/ 21. 22.#if(configUSE_TIMERS==1) 23.{ 24.if(xReturn==pdPASS) 25.{ 26.//創建定時器task,接收開始、結束定時器等命令 27.xReturn=xTimerCreateTimerTask(); 28.} 29.else 30.{ 31.mtCOVERAGE_TEST_MARKER(); 32.} 33.} 34.#endif/*configUSE_TIMERS*/ 35. 36.if(xReturn==pdPASS) 37.{ 38./*freertos_tasks_c_additions_init()shouldonlybecallediftheuser 39.*definablemacroFREERTOS_TASKS_C_ADDITIONS_INIT()isdefined,asthatis 40.*theonlymacrocalledbythefunction.*/ 41.#ifdefFREERTOS_TASKS_C_ADDITIONS_INIT 42.{ 43.freertos_tasks_c_additions_init(); 44.} 45.#endif 46. 47.portDISABLE_INTERRUPTS(); 48. 49.#if(configUSE_NEWLIB_REENTRANT==1) 50.{ 51._impure_ptr=&(pxCurrentTCB->xNewLib_reent); 52.} 53.#endif/*configUSE_NEWLIB_REENTRANT*/ 54. 55.xNextTaskUnblockTime=portMAX_DELAY; 56.xSchedulerRunning=pdTRUE; 57.xTickCount=(TickType_t)configINITIAL_TICK_COUNT; 58. 59.portCONFIGURE_TIMER_FOR_RUN_TIME_STATS(); 60. 61.traceTASK_SWITCHED_IN(); 62. 63./*Settingupthetimertickishardwarespecificandthusinthe 64.*portableinterface.*/ 65.if(xPortStartScheduler()!=pdFALSE) 66.{ 67./*系統開始運行*/ 68.} 69.else 70.{ 71./*ShouldonlyreachhereifataskcallsxTaskEndScheduler().*/ 72.} 73.} 74.else 75.{ 76./*****/ 77.}
4.6任務狀態切換
FreeRTOS 系統中的每一個任務都有多種運行狀態,具體如下:
?任務掛起函數
vTaskSuspend()
掛起指定任務,被掛起的任務絕不會得到 CPU 的使用權
vTaskSuspendAll()
將所有的任務都掛起?任務恢復函數
vTaskResume() vTaskResume() xTaskResumeFromISR()
任務恢復就是讓掛起的任務重新進入就緒狀態,恢復的任務會保留掛起前的狀態信息,在恢復的時候根據掛起時的狀態繼續運行。xTaskResumeFromISR() 專門用在中斷服務程序中。無論通過調用一次或多次vTaskSuspend()函數而被掛起的任務,也只需調用一次恢復即可解掛 。
?任務刪除函數vTaskDelete()用于刪除任務。當一個任務可以刪除另外一個任務,形參為要刪除任 務創建時返回的任務句柄,如果是刪除自身, 則形參為 NULL。
4.7任務使用注意點
1、中斷服務函數是不允許調用任何會阻塞運行的接口。一般在中斷服務函數中只做標記事件的發生,然后通知任務,讓對應任務去執行相關處理 。
2、將緊急的處理事件的任務優先級設置偏高一些。
3、空閑任務(idle 任務)是 FreeRTOS 系統中沒有其他工作進行時自動進入的系統任務,永遠不會掛起空閑任務,不應該陷入死循環。
4、創建任務使用的內存不要過多,按需申請。如果浪費太多,后續應用申請大空間可能提示內存不足。
五、隊列
5.1隊列的概念
隊列用于任務間通信的數據結構,通過消息隊列服務,任務或中斷服務將消息放入消息隊列中。其他任務或者自身從消息隊列中獲得消息。實現隊列可以在任務與任務間、中斷和任務間傳遞信息。隊列操作支持阻塞等待,向已經填滿的隊列發送數據或者從空隊列讀出數據,都會導致阻塞,時間自定義。消息隊列的運作過程具如下:
5.2隊列創建
xQueueCreate()用于創建一個新的隊列并返回可用于訪問這個隊列的句柄。隊列句柄其實就是一個指向隊列數據結構類型的指針。
1.master_queue=xQueueCreate(50,sizeof(task_message_struct_t));
創建隊列,占用50個單元,每個單元為sizeof(task_message_struct_t)字節,和 malloc比較類似。其最終使用的函數是 xQueueGenericCreate(),后續信號量等也是使用它創建,只是最后的隊列類型不同。
申請內存后,xQueueGenericReset再對其進行初始化,隊列的結構體xQUEUE成員:
1.typedefstructQueueDefinition/*Theoldnamingconventionisusedtopreventbreakingkernelawaredebuggers.*/ 2.{ 3.int8_t*pcHead;/*
5.3隊列刪除
隊列刪除函數 vQueueDelete()需傳入要刪除的消息隊列的句柄即可,刪除之后這個消息隊列的所有信息都會被系統回收清空,而且不能再次使用這個消息隊列了。實際應用中很少使用。
5.4向隊列發送消息
任務或者中斷服務程序都可以給消息隊列發送消息,當發送消息時,如果隊列未滿或者允許覆蓋入隊,FreeRTOS 會將消息拷貝到消息隊列隊尾,否則,會根據用戶指定的超時時間進行阻塞,消息發送接口很多,最簡單的是 xQueueSend(),用于向隊列尾部發送一個隊列消息。消息以拷貝的形式入隊,該函數絕對不能在中斷服務程序里面被調用,中斷中必須使用帶有中斷保護功能的 xQueueSendFromISR()來代替。
BaseType_txQueueSend(QueueHandle_txQueue,constvoid*pvItemToQueue,TickType_txTicksToWait);
用于向隊列尾部發送一個隊列消息。
參數
xQueue隊列句柄
pvItemToQueue指針,指向要發送到隊列尾部的隊列消息。
xTicksToWait隊列滿時,等待隊列空閑的最大超時時間。如果隊列滿并且xTicksToWait 被設置成 0,函數立刻返回。超時時間的單位為系統節拍周期 tick,延時為 portMAX_DELAY 將導致任務掛起(沒有超時)。
返回值
消息發送成功成功返回 pdTRUE,否則返回 errQUEUE_FULL。
xQueueSendToBack與xQueueSend完全相同, xQueueSendFromISR()與 xQueueSendToBackFromISR(),帶FromISR表示只能在中斷中使用,freeRTOS所以帶這個后綴的都是這個含義。xQueueSendToFront()和QueueSendToFrontFromISR()用于向隊列隊首發送一個消息。這些在任務中發送消息的函數都是 xQueueGenericSend()展開的宏定義。
1.BaseType_txQueueGenericSend(QueueHandle_txQueue, 2.constvoid*constpvItemToQueue, 3.TickType_txTicksToWait, 4.constBaseType_txCopyPosition)//發送數據到消息隊列的位置
一般使用xQueueSend和xQueueSendFromISR,如不確定當前運行的是系統服務,還是中斷服務,一般ARM都支持查詢中斷狀態寄存器判斷,可以封裝一層接口,只管發消息,內部判斷是否使用支持中斷嵌套的版本,UIS8910就是如此。特殊情況下,如發送網絡數據包未收到服務器響應,期望立刻入隊再次發送它,可以xQueueSendToFront向隊頭發消息。
5.5從隊列讀取消息
當任務試圖讀隊列中的消息時,可以指定一個阻塞超時時間,當且僅當消息隊列中有消息的時候,任務才能讀取到消息。如果隊列為空,該任務將保持阻塞狀態以等待隊列數據有效。當其它任務或中斷服務程序往其等待的隊列中寫入了數據,該任務將自動由阻塞態轉為就緒態。當任務等待的時間超過了指定的阻塞時間,即使隊列中尚無有效數據,任務也會自動從阻塞態轉移為就緒態。所有的task主入口while循環體都是按這個執行。例如:
1.staticvoidtrack_master_task_main() 2.{ 3.track_task_message_struct_tqueue_item={0}; 4./****/ 5. 6.while(1) 7.{ 8.if(xQueueReceive(master_queue,&queue_item,portMAX_DELAY))//阻塞等待 9.{ 10.track_master_task_msg_handler(&queue_item); 11.} 12.} 13.}
xQueueReceive()用于從一個隊列中接收消息并把消息從隊列中刪除。如果不想刪除消息的話,就調用 xQueuePeek()函數。xQueueReceiveFromISR()與xQueuePeekFromISR()是中斷版本,用于在中斷服務程序中接收一個隊列消息并把消息。這兩個函數只能用于中斷,是不帶有阻塞機制的,實際項目沒有使用。
5.6查詢隊列使用情況
uxQueueMessagesWaiting()查詢隊列中存儲的信息數目,具有中斷保護的版本為uxQueueMessagesWaitingFromISR()。查詢隊列的空閑數目uxQueueSpacesAvailable()。
5.7隊列使用注意點
使用隊列函數需要注意以下幾點:
1、中斷中必須使用帶FromISR后綴的接口;
2、發送或者是接收消息都是以拷貝的方式進行,如果消息內容過于龐大,可以將消息的地址作為消息進行發送、接收。
1.typedefstruct 2.{ 3.TaskHandle_tsrc_mod_id; 4.intmessage_id; 5.int32_tparam; 6.union 7.{ 8.int32_tresult; 9.int32_tsocket_id; 10.}; 11.void*pvdata;//大數據使用動態申請內存保存,隊列只傳遞指針 12.}track_task_message_struct_t;
3、隊列并不屬于任何任務,所有任務都可以向同一隊列寫入和讀出,一個隊列可以由多任務或中斷讀寫。
4、隊列的深度要結合實際,可以多申請點,前提是每個隊列單元盡可能小。
5、隊列存在一定限制,在隊頭沒有取出來之前,是無法取出第二個,和STL鏈表存在差異。
六、軟件定時器
6.1軟件定時器的概念
定時器有硬件定時器和軟件定時器之分,硬件定時器是芯片本身提供的定時功能精度高,并且是中斷觸發方式。軟件定時器是由操作系統封裝的接口,它構建在硬件定時器基礎之上,使系統能夠提供不受硬件定時器資源限制,其實現的功能與硬件定時器也是類似的。
在操作系統中,通常軟件定時器以系統節拍周期為計時單位。系統節拍配置為configTICK_RATE_HZ,該宏在 FreeRTOSConfig.h 中,一般是100或者1000。根據實際系統 CPU 的處理能力和實時性需求設置合適的數值,系統節拍周期的值越小,精度越高,但是系統開銷也將越大,因為這代表在 1 秒中系統進入時鐘中斷的次數也就越多。
6.2軟件定時器創建
軟件定時器需先創建才允許使用,動態創建方式是xTimerCreate(),返回一個句柄。軟件定時器在創建成功后是處于休眠狀態的,沒有開始計時運行。FreeRTOS的軟件定時器支持單次模式和周期模式。
單次模式:當用戶創建了定時器并啟動了定時器后,定時時間到了,只執行一次回調函數,之后不再執行。周期模式:定時器會按照設置的定時時間循環執行回調函數,直到用戶將定時器停止或刪除。
實際項目中使用這種模式對單片機喂狗就比較省事。
1.TimerHandle_txTimerCreate(constchar*constpcTimerName,//定時器名稱 2.constTickType_txTimerPeriodInTicks,//定時時間 3.constUBaseType_tuxAutoReload,//是否自動重載 4.void*constpvTimerID,//回調函數的參數 5.TimerCallbackFunction_tpxCallbackFunction)//回調函數
6.3軟件定時器開啟
新創建的定時器沒有開始計時啟動,可以使用
xTimerStart()、 xTimerReset()、 xTimerStartFromISR()、xTimerResetFromISR() xTimerChangePeriod()、xTimerChangePeriodFromISR()
這些函數將其狀態轉換為活躍態,開始運行。區別:如果定時器設定60秒間隔,已經運行了30秒,reset是將定時器重置為原來設定的時間間隔,也就是重新開始延時60秒。ChangePeriod重新設置計時周期。
6.4軟件定時器停止
xTimerStop() 用于停止一個已經啟動的軟件定時器,xTimerStopFromISR()是中斷版本。
6.5軟件定時器刪除
xTimerDelete()用于刪除一個已經被創建成功的軟件定時器,釋放資源,刪除之后不能再使用。實際項目中,任務和隊列都是按需創建,一直使用,但是定時器不使用的就應該刪除,并且刪除后一定要將句柄置為NULL。
6.6軟件定時器源碼分析
軟件定時器任務是在系統開始調度的時候就被創建:vTaskStartScheduler()—xTimerCreateTimerTask。
1.BaseType_txTimerCreateTimerTask(void) 2.{ 3.BaseType_txReturn=pdFAIL; 4. 5.prvCheckForValidListAndQueue();//創建定時器任務的隊列 6. 7.if(xTimerQueue!=NULL) 8.{ 9.#if(configSUPPORT_STATIC_ALLOCATION==1) 10.{ 11./**/ 12.} 13.#else/*if(configSUPPORT_STATIC_ALLOCATION==1)*/ 14.{ 15.//創建定時器任務 16.xReturn=xTaskCreate(prvTimerTask, 17.configTIMER_SERVICE_TASK_NAME, 18.configTIMER_TASK_STACK_DEPTH, 19.NULL, 20.((UBaseType_t)configTIMER_TASK_PRIORITY)|portPRIVILEGE_BIT, 21.&xTimerTaskHandle); 22.} 23.#endif/*configSUPPORT_STATIC_ALLOCATION*/ 24.} 25./**/ 26.returnxReturn; 27.}
任務創建后,等候命令執行
1.staticportTASK_FUNCTION(prvTimerTask,pvParameters) 2.{ 3./**/ 4. 5.for(;;) 6.{ 7.//最近即將超時的定時器還有多長時間溢出 8.xNextExpireTime=prvGetNextExpireTime(&xListWasEmpty); 9. 10.//阻塞等待,定時器溢出或受到命令,進入下一步(原因不明) 11.prvProcessTimerOrBlockTask(xNextExpireTime,xListWasEmpty); 12. 13.//接收命令并處理,見下面 14.prvProcessReceivedCommands(); 15.} 16.}
所有定時器接口,都是使用xTimerGenericCommand向隊列發送控制命令,命令如下:
1.#definetmrCOMMAND_START_DONT_TRACE((BaseType_t)0) 2.#definetmrCOMMAND_START((BaseType_t)1) 3.#definetmrCOMMAND_RESET((BaseType_t)2) 4.#definetmrCOMMAND_STOP((BaseType_t)3) 5.#definetmrCOMMAND_CHANGE_PERIOD((BaseType_t)4) 6.#definetmrCOMMAND_DELETE((BaseType_t)5)
6.7軟件定時器使用注意點
1、查看其他開源代碼,對定時器的使用并不多,但實際項目中過多依賴定時器,導致應用邏輯混亂。
2、freeRTOS 的定時器不是無限制的,其根源是接收定時器控制命令消息的隊列,默認只有10個單元。
1.xTimerQueue=xQueueCreate((UBaseType_t)configTIMER_QUEUE_LENGTH,sizeof(DaemonTaskMessage_t));
定時器過多,可能出現發起定時器命令失敗,原因是隊列已滿。可以將默認的10擴大為15,后續盡量使用信號量來優化代碼。
4、軟件定時器的回調函數要快進快出,而且不能有任何阻塞任務運行的情況,不能有vTaskDelay() 以及其它能阻塞任務運行的函數。特別說明,其回調函數是在定時器任務執行的,并不是開啟定時器的任務。
七、信號量
7.1信號量的概念
信號量(Semaphore)是一種實現任務間通信的機制,可以實現任務之間同步或臨界資源的互斥訪問,常用于協助一組相互競爭的任務來訪問臨界資源。在多任務系統中,各任務之間需要同步或互斥實現臨界資源的保護,信號量功能可以為用戶提供這方面的支持。可以簡單認為是為支持多任務同時操作的全局變量(個人理解)。
7.1.1二值信號量
比如有一個停車位,多個人都想占用停車,這種情況就可以使用一個變量標記車位狀態,它只有兩種情況,被占用或者沒被占用。在多任務中使用二值信號量表示,用于任務與任務、任務與中斷的同步。在freeRTOS中,二值信號量看作只有一個消息的隊列,因此這個隊列只能為空或滿。
7.1.2計數信號量
如果有100個停車位,可以停100輛車,每進去一輛車,車位的數量就要減一,當停車場停滿了 100 輛車的時候,再來的車就不能停進去了。這種場景就需要計數信號量來表示多個狀態。二進制信號量可以被認為是長度為 1 的隊列,而計數信號量則可以被認為長度大于 1 的隊列,信號量使用者依然不必關心存儲在隊列中的消息,只需關心隊列是否有消息即可。
7.1.3互斥信號量
還是前面車位問題,只剩一個空車位,雖然員工車離得近,但是領導車來了,要優先安排給領導使用,這就是由地位決定。互斥信號量其實是特殊的二值信號量,由于其特有的優先級繼承機制從而使它更適用于簡單互鎖,也就是保護臨界資源。
優先級翻轉問題:假設有任務H,任務M和任務L三個任務,優先級逐次降低。低優先級的任務L搶先占有資源,導致高優先級的任務H阻塞等待,此時再有中等優先級的任務M,它不需要該資源,且優先級高于任務L,它優先執行;之后再執行任務L,最后才執行任務H。看起來就是高優先級的任務反而不如低優先級的任務,即優先級翻轉。
改進型的互斥信號量具有優先級繼承機制,操作系統對獲取到臨界資源的任務提高其優先級為所有等待該資源的任務中的最高優先級。一旦任務釋放了該資源,就恢復到原來的優先級。
任務L先占用資源,任務H申請不到資源會進入阻塞態,同時系統就會把當前正在使用資源的任務L的優先級臨時提高到與任務H優先級相同,即使任務M被喚醒了,因為它的優先級比任務H低,所以無法打斷任務L,因為任務L的優先級被臨時提升到 H;任務L使用完該資源,任務H優先級最高,將接著搶占 CPU 的使用權,這樣保證任務H在任務M前優先執行。
上面的這些就是為了說明,二值信號量因為優先級翻轉,不能用于對臨界區的訪問。
7.1.4遞歸互斥信號量
信號量是每獲取一次,可用信號量個數就會減少一個,釋放一次就增加一個。但是遞歸信號量則不同。對于已經獲取遞歸互斥量的任務可以重復獲取該遞歸互斥量,該任務擁有遞歸信號量的所有權。任務成功獲取幾次遞歸互斥量,就要返還幾次,在此之前遞歸互斥量都處于無效狀態,其他任務無法獲取,只有持有遞歸信號量的任務才能獲取與釋放。類似棧的效果。
7.2二值信號量的應用
二值信號量是任務與任務間、任務與中斷間同步的重要手段。例如,任務A使用串口發出AT數據后,獲取二值信號量無效進入阻塞;
某個時間后,任務B中串口收到正確的回復,釋放二值信號量。
任務A就立即從阻塞態中解除,進入就緒態,等待運行。這種機制用在模塊AT交互很合適。
7.3計數信號量的應用
計數信號量可以用于資源管理,允許多個任務獲取信號量訪問共享資源。例如有公共資源車位3個,但是有多個任務要使用,這種場景就必須使用計數信號量。三個資源最多支持 3 個任務訪問,那么第 4 個任務訪問的時候,會因為獲取不到信號量而進入阻塞。也就是第4個人無法占用車位,必須前面有車離開。等到其中一個有任務(比如任務 1) 釋放掉該資源的時候,第 4 個任務才能獲取到信號量從而進行資源的訪問。其運作的機制類似下圖。
在這里插入圖片描述
7.4互斥信號量的應用
多任務環境下往往存在多個任務競爭同一臨界資源的應用場景,互斥量可被用于對臨界資源的保護從而實現獨占式訪問。互斥量可以降低信號量存在的優先級翻轉問題帶來的影響。
比如有兩個任務需要對串口進行發送數據,其硬件資源只有一個,那么兩個任務肯定不能同時發送,不然導致數據錯誤,那么就可以用互斥量對串口資源進行保護,當一個任務正在使用串口的時候,另一個任務則無法使用串口,等到前一個任務使用串口完成后, 另外一個任務才能獲得串口的使用權。
另外需要注意的是互斥量不能在中斷服務函數中使用,因為其特有的優先級繼承機制只在任務起作用,在中斷的上下文環境毫無意義。
互斥信號量可以在多個任務之間進行資源保護,而臨界區只能是在同一個任務進行,但是其速度快。(個人理解)
7.5信號量接口
所有信號量semaphore使用套路相近,都是創建creat、刪除delete、釋放give和獲取take四種;釋放和獲取支持任務級和中斷級FromISR,其中互斥量和遞歸互斥量不支持中斷。使用對應的信號量,需要在FreeRTOSConfig.h開啟對應的功能。
7.5.1信號量創建
xSemaphoreCreateBinary()用于創建一個二值信號量,并返回一個句柄,默認二值信號量為空,在使用函數 xSemaphoreTake()獲取之前必須 先 調 用 函 數 xSemaphoreGive() 釋放后才可以獲取。
xSemaphoreCreateCounting()創建計數信號量。
1.#definexSemaphoreCreateCounting(uxMaxCount,uxInitialCount)
uxMaxCount計數信號量的最大值,當達到這個值的時候,信號量不能再被釋放。uxInitialCount創建計數信號量的初始值。
xSemaphoreCreateMutex()用于創建一個互斥量,并返回一個互斥量句柄,只能被同一個任務獲取一次,如果同一個任務想再次獲取則會失敗。
xSemaphoreCreateRecursiveMutex()用于創建一個遞歸互斥量,遞歸信號量可以被同一個任務獲取很多次,獲取多少次就需要釋放多少次。遞歸信號量與互斥量一樣,都實現了優先級繼承機制,可以減少優先級反轉的反生。
7.5.2信號量刪除
vSemaphoreDelete()用于刪除一個信號量,包括二值信號量,計數信號量,互斥量和遞 歸互斥量。如果有任務阻塞在該信號量上,暫時不要刪除該信號量。傳入的參數為創建時返回的句柄。
7.5.3信號量釋放
當信號量有效的時候,任務才能獲取信號量,信號量變得有效就是釋放信號量。每調用一次該函數就釋放一個信號量,注意釋放的次數,尤其是計數信號量。
xSemaphoreGive()是任務中釋放信號量的宏,可以用于二值信號量、計數信號量、互斥量的釋放,但不能釋放由函數xSemaphoreCreateRecursiveMutex()創建的遞歸互斥量,遞歸互斥信號量用xSemaphoreGiveRecursive()釋放。xSemaphoreGiveFromISR()帶中斷保護釋放一個信號量,被釋放的信號量可以是二值信號量和計數信號量,不能釋放互斥量和遞歸互斥量,因為互斥量和遞歸互斥量不可在中斷中使用,互斥量的優先級繼承機制只能在任務中起作用。
7.5.4信號量獲取
與釋放信號量對應的是獲取信號量,當信號量有效的時候,任務才能獲取信號量,當任務獲取了某個信號量的時候,該信號量的可用個數就減一,當它減到0 的時候,任務就無法再獲取了,并且獲取的任務會進入阻塞態(如果設定了阻塞超時時間)。
xSemaphoreTake()函數用于獲取信號量,不帶中斷保護。獲取的信號量對象可以是二值信號量、計數信號量和互斥量,但是遞歸互斥量并不能使用它。
1.#definexSemaphoreTake(xSemaphore,xBlockTime)
xSemaphore信號量句柄
xBlockTime等待信號量可用的最大超時時間,單位為 tick
獲取 成 功 則 返 回 pdTRUE ,在 指定的 超時 時間 中 沒 有 獲 取 成 功 則 返 回errQUEUE_EMPTY。
使用xSemaphoreTakeRecursive()獲取遞歸互斥量。xSemaphoreTakeFromISR()是獲取信號量的中斷版本,是一個不帶阻塞機制獲取信號量的函數,獲取對象必須由是已經創建的信號量,信號量類型可以是二值信號量和計數信號量,它與 xSemaphoreTake()函數不同,它不能用于獲取互斥量,因為互斥量不可以在中斷中使用,并且互斥量特有的優先級繼承機制只能在任務中起作用,而在中斷中毫無意義。
7.6信號量使用注意點
1、建議合理使用信號量進行事件同步處理,減少對定時器的依賴。
2、使用前合理設定超時時間和依賴關系,避免多個任務互相等待對方釋放的信號量而死鎖。
八、事件
8.1事件的概念
信號量用于單個任務與任務或任務與中斷之間的同步,但有些任務可能與多個任務由關聯,此時信號量實現就比較麻煩,可以使用事件機制。
事件是一種實現任務間通信的機制,多任務環境下,任務、中斷之間往往需要同步操作,一個事件發生會告知等待中的任務,即形成一個任務與任務、中斷與任務間的同步。事件可以提供一對多、多對多的同步操作。一對多同步模型:一個任務等待多個事件的觸發,這種情況是比較常見的。
任務可以通過設置事件位來實現事件的觸發和等待操作。FreeRTOS 的事件僅用于同步,不提供數據傳輸功能。
8.2事件的應用
在某些場合,可能需要多個事件發生了才能進行下一步操作。各個事件可分別發送或一起操作事件標志組,而任務可以等待多個事件,任務僅對感興趣的事件進行關注。當有感興趣的事件發生時并且符合感興趣的條件,任務將被喚醒并進行后續的處理動作。
其機制類似一個全局變量,子任務使用特殊的接口函數對指定的位進行寫1或者清零,主任務阻塞等待該變量滿足設定的規則,則返回運行。
例如項目中的喂狗機制,多個任務,只要有一個任務發生異常,則主任務停止喂狗,等待被重啟。
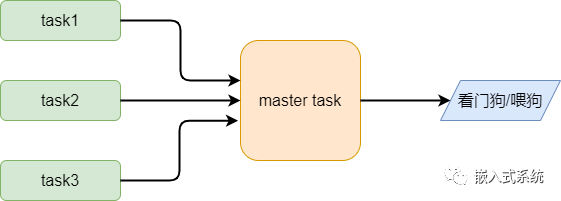
不使用事件機制,則3個任務定時向主master task發送消息,表明自身任務運行正常;同時master task定時查詢,是否收到3個任務的消息,如果全都收到表示正常,清除進入下一個定時檢查周期;如果其中一個未收到則表示對應任務異常,故意停止喂狗等待被重啟。
使用事件機制,則相對容易,3個任務定時設置對應的標志位,master task只需要等待指定的事件位,超時就表示異常;不需要自身定時查詢,也省去了定時發消息。當然缺點是master task只能阻塞等待事件不能執行其他業務邏輯。
8.3事件接口
xEventGroupCreate()用于創建一個事件組,vEventGroupDelete()刪除事件對象控制塊來釋放系統資源。
事件組置位,任務中使用 xEventGroupSetBits(),中斷中使用xEventGroupSetBitsFromISR();
xEventGroup事件句柄。uxBitsToSet指定事件中的事件標志位。如設置 uxBitsToSet 為 0x09 則位 3和位 0 都需要被置位。返回調用 xEventGroupSetBits() 時事件組中的值。
事件組清除位,任務中使用xEventGroupClearBits(),中斷中使用 xEventGroupClearBitsFromISR(),都是用于清除事件組指定的位,如果在獲取事件的時候沒有將對應的標志位清除,那么就需要用這個函數來進行顯式清除。
xEventGroup事件句柄。uxBitsToClear指定事件組中的哪個位需要清除。如設置 uxBitsToSet 為 0x09則位 3和位 0 都需要被清除。
讀取事件標志,任務中使用 xEventGroupGetBits(),中斷中使用xEventGroupGetBitsFromISR()。
重點是等待事件函數xEventGroupWaitBits(),獲取任務感興趣的事件且支持等待超時機制,當且僅當任務等待的事件發生時,任務才能獲取到事件信息。否則任務將保持阻塞狀態以等待事件發生。當其它任務或中斷服務程序往其等待的事件設置對應的標志位,該任務將自動由阻塞態轉為就緒態。
EventGroupWaitBits()用于獲取事件組中的一個或多個事件發生標志,當要讀取的事件標志位沒有被置位時,任務將進入阻塞等待狀態。要想使用該函數必 須 把FreeRTOS/source/event_groups.c 這個 C 文件添加到工程中。
1.EventBits_txEventGroupWaitBits(EventGroupHandle_txEventGroup, 2.constEventBits_tuxBitsToWaitFor, 3.constBaseType_txClearOnExit, 4.constBaseType_txWaitForAllBits, 5.TickType_txTicksToWait)
參數
xEventGroup事件句柄。
uxBitsToWaitFor一個按位或的值,指定需要等待事件組中的哪些位置1。如需要等待 bits 0 and/or bit 1 and/or bit 2則 uxBitsToWaitFor 配置為 0x07(0111b)。
xClearOnExitpdTRUE:xEventGroupWaitBits() 等待到滿足任務喚醒的事件時,系統將清除由形參uxBitsToWaitFor 指定的事件標志位。pdFALSE:不會清除由形參 uxBitsToWaitFor 指定的事件標志位。
xWaitForAllBitspdTRUE :當形參 uxBitsToWaitFor 指定的位都置位的時候,xEventGroupWaitBits()才滿足任務喚醒的條件,這也是“邏輯與”等待事件,并且在沒有超時的情況下返回對應的事件標志位的值。pdFALSE:當形參 uxBitsToWaitFor 指定的位有其中任意一個置位的時候,這也是常說的“邏輯或”等待事件,在沒有超時的情況下 函數返回對應的事件標志位的值。xTicksToWait最大超時時間,單位為系統節拍周期
返回值
返回事件中的哪些事件標志位被置位,返回值很可能并不是用戶指定的事件位,需要對返回值進行判斷再處理 。
其應用類似某個全局變量,等待事件的任務在設定的時間內,監控該變量某些位的值;該值由其他任務或中斷修改。
九、任務通知
FreeRTOS 從 V8.2.0 版本開始提供任務通知這個功能,可以在一定場合下替代 FreeRTOS 的信號量,隊列、事件組等,但是使用也有局限性。將宏定義 configUSE_TASK_NOTIFICATIONS 設置為 1才能開啟開功能。但該功能并不常用。
十、內存管理
10.1內存管理的概念
FreeRTOS 內存管理模塊管理用于系統中內存資源,它是操作系統的核心模塊之一。主要包括內存的初始化、分配以及釋放。一般不同的平臺移植代碼,內存的動態申請和釋放接口需要替換。嵌入式實時操作系統中,一般不支持標準C庫中的 malloc()和 free(),其內存有限,隨著內存不斷被分配和釋放,整個系統內存區域會產生越來越多的碎片。
FreeRTOS提供了 5 種內存管理算法,源文件在SourceportableMemMang 路徑下,使用的時候選擇其中一個。heap_1.c、heap_2.c 和 heap_4.c 這三種內存管理方案,內存堆實際上是一個很大的 數 組ucHeap。
heap_1.c內存管理方案簡單,它只能申請內存而不能進行內存釋放。有些嵌入式系統并不會經常動態申請與釋放內存,一般都是在系統啟動后就一直使用下去,永不刪除,適合這種方式。
heap_2.c 方案支持釋放申請的內存,但是它不能把相鄰的兩個小的內存塊合成一個大的內存塊,對于每次申請內存大小都比較固定的;但每次申請并不是固定內存大小的則會造成內存碎片。如下圖,隨著不斷的申請釋放,空閑空間會變成很多小片段。
heap_3.c 方案只是封裝了標準 C 庫中的 malloc()和 free()函數,由編譯器提供,需要通過編譯器或者啟動文件設置堆空間。
heap_4.c 方案是在heap_2.c 基礎上,對內存碎片進行了改進,能把相鄰的空閑的內存塊合并成一個更大的塊,這樣可以減少內存碎片。
heap_5.c 方案在實現動態內存分配時與 heap4.c 方案一樣,采用最佳匹配算法和合并算法,并且允許內存堆跨越多個非連續的內存區,也就是允許在不連續的內存堆中實現內存分配,比如做圖形顯示,可能芯片內部的 RAM 不足,額外擴展SDRAM,那這種內存管理方案則比較合適。
一般物聯網平臺使用的是heap_4.c。
10.2內存管理接口
不管其內部的管理如何實現的,對上層應用層的接口都是一樣的。
1.void*pvPortMalloc(size_txSize);//內存申請函數 2.voidvPortFree(void*pv);//內存釋放函數 3.voidvPortInitialiseBlocks(void);//初始化內存堆函數 4.size_txPortGetFreeHeapSize(void);//獲取當前未分配的內存堆大小 5.size_txPortGetMinimumEverFreeHeapSize(void);//獲取未分配的內存堆歷史最小值
一般主要是使用內存申請和釋放兩個接口,用法和注意事項同malloc/free一樣,成對使用。內存釋放后盡量將指針設為NULL。
十一、通用接口
一些常用接口進行說明。
11.1臨界段
進入和退出臨界段的宏在 task.h 中定義,進入和退出臨界段的宏分中斷保護版本和非中斷版本,但最終都是通過開/關中斷來實現。主要用于對全局變量的控制,系統使用非常多,但實際項目中沒使用,因為全局變量的異常訪問時小概率問題,只是測試沒發現,理論上是存在問題的。
1./*在中斷場合*/{ 2.uint32_tulReturn; 3. 4.ulReturn=taskENTER_CRITICAL_FROM_ISR();/*進入臨界段,臨界段可以嵌套*/ 5. 6./*臨界段代碼*/ 7. 8.taskEXIT_CRITICAL_FROM_ISR(ulReturn);}/*退出臨界段*/1./*在非中斷場合*/{ 2. 3.taskENTER_CRITICAL();/*進入臨界段*/ 4. 5./*臨界段代碼*/ 6. 7.taskEXIT_CRITICAL();}/*退出臨界段*/
11.2任務阻塞延時
vTaskDelay ()阻塞延時,任務調用該延時函數后會被剝離 CPU 使用權,進入阻塞狀態,直到延時結束。但是該函數不能用在中斷服務和定時回調函數。延時單位是tick。
11.3獲取系統時鐘計數值
1.TickType_txTaskGetTickCount(void) 2.TickType_txTaskGetTickCountFromISR(void)
注意該接口分任務版和中斷版,該接口獲取的是tick計數值,需要結合系統時鐘頻率轉換成時間。
11.4中斷回調函數
和其它平臺不同,中斷回調中釋放中斷標記即可,freeRTOS中,中斷觸發后,可能某些阻塞的任務獲取了相關信號,需要立刻執行,因此中斷服務發送消息后,需要主動查詢阻塞任務的情況,執行任務切換動作。
1.staticuint32_tulExampleInterruptHandler(void) 2.{ 3.BaseType_txHigherPriorityTaskWoken; 4. 5.xQueueSendToBackFromISR(xQueueRx,&cChar,&xHigherPriorityTaskWoken); 6.portYIELD_FROM_ISR(xHigherPriorityTaskWoken); 7.}
責任編輯:lq
-
操作系統
+關注
關注
37文章
7077瀏覽量
124933 -
RTOS
+關注
關注
24文章
840瀏覽量
120743 -
單片機編程
+關注
關注
10文章
49瀏覽量
26138
原文標題:FreeRTOS及其應用,萬字長文,基礎入門
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
cubemx生成的freertos代碼在keil ac6下不能編譯,怎么解決?
移植LWIP+FREERTOS時遇到的問題怎么解決?
STM32CubeMX生成的FreeRTOS源碼格式如何優化?
在TM4C MCU上用FreeRTOS開發通用應用程序應用說明

STM32CUBEMX生成freeRTOS代碼的時候出現警告
freertos最多支持多少個任務
freertos和rtos區別是什么
freertos中斷優先級在哪設置
freertos和裸機有什么區別
freertos和rtthread哪一個更好
使用freeRTOS開發工具包時,在哪里可以找到freeRTOS的版本?
HPM SDK 1.6.0 FreeRTOS LTS更改及適配指南






 工商網監
工商網監
評論