 傳感器技術在人機協作安全的的應用和研究有哪些?
傳感器技術在人機協作安全的的應用和研究有哪些?
工業4.0的制造前景包括從自動化制造向智能制造概念的轉變。工業4.0發展中的一大期望是在小批量生產中滿足客戶對產品變化的需求,從而不會浪費重新配置組裝線等時間。智能制造的實現將通過物聯網的概念進行,其中每個參與組件都有其已知的IP地址。在這種情況下,智能制造生產系統不僅要以小批量的生產產品來滿足客戶的需求,還必須具有更好的預測性維護,產品設計的穩健性和適應性生產等特點。為了使智能機器人工廠能夠在工業4.0和物聯網的環境中工作,因此機器人將在未來的制造業中承擔大部分工作,但是人類工人必須留在工作區域中,擔任監督角色或從事未經機器人培訓的工作。在機器人工作區域內或附近,人類不斷出現,這改變了人們對機器人工作區域的柵欄和禁止方式,需要機器人和人類可以安全地共存和協作。
在這種情況下,機器人與人類共享相同的工作空間,并進行工業活動,例如原材料處理,組裝和工業產品轉移。傳統的方法是使人類在有限的范圍內接觸機器人,并采用適當的安全控制措施,以防工人進入機器人的工作區而導致機器完全停止,一旦進入,會導致中斷和重置程序被激活,延長生產時間。隨之出現了新提議的方法,即安全的人機協作(HRC),沒有任何圍欄。為了實現這一點,需要采用協作式機器人網絡物理系統(CPS)實施額外的安全和保護措施,這要求基于人與機器人之間的交互程度,確保安全性,并提高生產率。實際上,協作機器人網絡物理系統的設計方法是將安全性和安全性問題進行合并,就像設計同時考慮這兩個方面的工業設施,下圖是協作型機器人的幾種應用類型。
協作機器人網絡物理系統是一種智能系統,其中集成了計算和物理系統,以控制和感知現實世界變量的變化狀態。這種CPS的成功取決于可靠,安全和可靠的傳感器網絡和通信技術。CPS平臺不斷發展其架構,以跨越數字物理鴻溝進行工程設計,并消除了關鍵技術之間的界限。特別是,其中包括電子,計算,通信,傳感,驅動,嵌入式系統和傳感器網絡等。CPS模型中主要包括三個組成部分,人為成分,物理成分和計算成分。
這三者是集成在一起的三個模塊。隨著使能技術的發展,這三個組成部分之間的互動越來越多,彼此之間通過不同的技術連接在一起,例如,人體位置跟蹤和安全距離參數是機器人CPS中工作人員安全的重要考慮因素。機器人系統是高度自動化的系統,消除了元素之間的邊界,通過交互加以彼此連接。有多種基于人的視覺,聽覺和觸覺的人機交互技術。機器人CPS可以使用視覺系統來檢測,跟蹤和手勢識別人類,也可以使用來自人類的音頻信號命令機器人。各類傳感器和執行器可以使三者之間產生多種不同的交互方式。
在人機協作中,會在CPS中應用多種傳感器,以確保安全性。傳統方法是手動提供指導或根據要求降低機器人速度,該類方法多為開環的,其人機協作的水平取決于應用現場的風險評估,而且局限于小型機器人的應用。第二種安全方法是指定一個工作區,該工作區被激光掃描儀或接近傳感器之類的傳感器覆蓋。在這種情況下,機器人必須在人員進入工作區域時停下來。該系統是傳感器相關的閉環系統,但是幾乎沒有達到人機協作的操作目的,如下圖所示。第三種方法是通過基于視覺的系統或其他可能的技術進行速度或距離監視。如果工人進入危險區域,機器人可能會減速甚至停機,其中使用了多種集成傳感器和傳感器融合技術,極有可能達到較高的人機協作水平,但是如果監視功能失敗,則也會帶來一定的風險。最后一種方法是通過使用力傳感器進行力監控。機器人的速度和加速度的降低將根據允許撞擊工人身體部位的力的大小來進行。力大小會因身體不同部位而異。該方案提供了最高水平的人機協作程度,但是還要求集成多種類型的傳感器,融合傳感器,并在監視功能失敗的情況下對風險評估提出挑戰。
通過上述幾種不同的協作技術和相應的人機協作水平,研究人員正式確定人機協作評分方案和衡量標注。其一是計算安裝在CPS系統中的傳感器數量。其二是單個傳感器或同一類型傳感器組的數據速率,因為每個傳感器的延遲時間都取決于整個系統的響應時間。因此,系統的總體延遲時間是關鍵性能指標,使機器人能夠及時啟動安全協議以應對任何危險,較大的延遲時間會對機器人的反應時間產生不利影響,從而降低人機協作的水平。下圖是人機協作安全的等級圖。
因此,在CPS中要評估可以達到的人機協作的水平,有必要在給定的協作環境中計算指標。在應用各類傳感器,需要明確CPS中人員和機器人的位置,以及相應的應用場景。例如,可以用于與其他傳感器關聯的位置信息的視覺傳感器必須在足夠的照明條件下工作。此外,為了更快,更準確地響應機器人,通信必須更快,最好通過短距離,安全的無線網絡進行。總體而言,系統必須符合相關的安全標準。對于速度和距離監視情況,除了基本區域和位置監視傳感器系統外,還使用慣性測量單元(IMU)。同樣,對于基于力監控的人機協作系統,除了力傳感器之外,基本區域和位置監控對于實現人機協作也是必需的。在力監控中,可以使用不同類型的幾何形狀適合的觸覺傳感器來安裝在機器人上或機器人關節中,這些傳感器具有減震特性,可以安全地進行碰撞檢測和基于觸摸的交互。也可以使用不同區間的力傳感器來評估單獨人體部位的受力極限。
人機協作中除了特定解決方案中所采用的傳感器技術外,還可能存在多個可以建立通用解決方案或指南的工業場景。這些工業場景范圍包括從單個機器人到與多個人工一起工作的多個機器人構成人機協作系統。這其中可能包括使用慣性傳感器,視覺,雷達或用于人類位置監測的任何混合方法。混合方法可以結合使用兩種及以上方法,可以高精度地執行任務,因為來自多個單獨的傳感器系統的定位信息將相互配合并補償錯誤。此外,在給定的情況下,不同的傳感器在某些技術領域可能更實用,例如攝像機遇到視覺障礙時將無法運行。在這種情況下,其他技術傳感器將保持系統功能。
隨著機器人逐漸向著開放性空間發展,越來越多的機器人采用視覺信息處理及技術。例如,相關研究人員結合多傳感器信息融合技術,基于立體攝像機采集工作單元數據,系統檢測環境中的人員與機器人,并根據本體位置和軌跡生成動態危險區域。有研究基于深度傳感器建立深度空間方法,通過估計機器人與靜態和移動障礙物間的距離,進而將這種實時距離測量及障礙物速度估計信息與基于排斥力矢量的控制器一起用作防撞技術。此外,也有研究基于行為預測和圖像數據信息,通過RGB輸入的數據和標準化活動描述矢量來消除對定時或時間序列信息的需要,進而預測人體活動行為,避免碰撞。針對視覺采集過程中可能存在的物體遮掩問題,有研究人員基于機載傳感方法,開發了一種分布式距離傳感器,并優化了機器人本體傳感器最佳裝配位置,一定程度上降低了非結構環境下碰撞事件的發生。
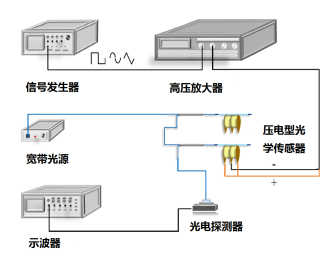
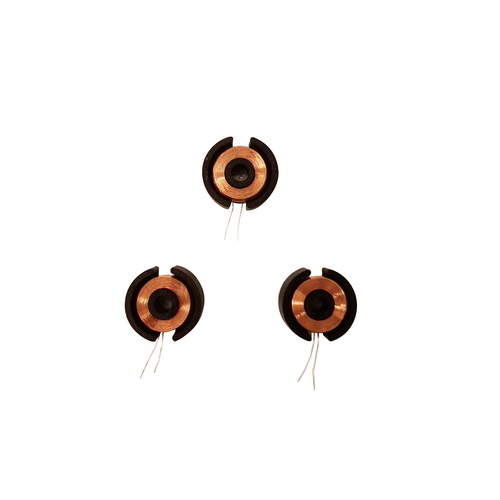
機器人皮膚是基于傳感原理和設計技術(如電阻,電容,壓電,聲學等)對傳感技術進行不同的分類,可以通過關注觸覺信息處理來進行不同的設計,如下圖所示。一個有趣且有用的發展方向是機器人的皮膚,可以提供豐富而直接的反饋,使機器人系統能夠通過多個接觸點識別物體。1)。基于皮膚的光學傳感器:基于皮膚的光學傳感器的總體思路是開發一種能夠提供觸覺和視覺信息的多模式傳感器。有鑒于此,一些研究人員提議用不透明的材料覆蓋傳感器的皮膚表面,以阻止外界光線進入傳感器。但是,使用不透明的材料會限制視覺傳感器提供的信息,因此使他們只專注于觸覺信息。為了解決這個問題,有研究人員提出了一個由透明皮膚,照相機和彩色標記組成的原型,可提供高分辨率的接觸力和近距離視覺。2)。基于皮膚的軟傳感器:各種常規的柔性傳感器都面臨著降低傳感器靈敏度的技術問題。例如,
老化和機械應力會導致磁滯現象并降低傳感器的靈敏度。為了應對這一挑戰,有人提出了一種磁流變觸覺傳感器,該傳感器由柔性的上層和下層彈性體組成。彈性片上的變形會引起磁通量的變化,從而影響傳感器的空間響應。
安全交互問題作為機器人交互融入大眾日常生活的基本要求,而傳感技術作為人機協作研究中的一部分,其研究和應用意義重大,為實現“中國制造2025”,構建新型工業體系和智能家園藍圖,人機協作安全和傳感器技術的研究需要進一步完善相關的學科研究和產業技術。
責任編輯:haq
-
傳感器
+關注
關注
2562文章
52524瀏覽量
763572 -
人機交互
+關注
關注
12文章
1236瀏覽量
56204 -
機器人
+關注
關注
213文章
29463瀏覽量
211516
發布評論請先 登錄
傳感器有哪些類型?有哪些接口?
安泰高壓放大器在傳感器基本傳感特性研究中的應用
愛普生XV7021BB陀螺儀傳感器在人機交互中的應用

干簧管傳感器屬于什么傳感器
位移傳感器在機器人中的角色
漢陽大學:研發自供電、原材料基傳感器,開啟人機交互新篇章

傳感器在低空經濟中的應用

霍爾傳感器在無人機中的應用

mems傳感器在汽車電子上的應用有哪些
高壓放大器在傳感器基本傳感特性研究中的應用





 工商網監
工商網監
評論