") 使用UART協(xié)議與計算機進行通信
使用UART協(xié)議與計算機進行通信
還記得當年的打印機,鼠標和調(diào)制解調(diào)器嗎?他們都有巨大笨重的連接器和粗電纜,并且必須擰到你的電腦上。這些設備正是使用UART協(xié)議與計算機進行通信。
雖然USB幾乎完全取代了舊的電纜和連接器,但UART絕對沒有過時。你會發(fā)現(xiàn)目前許多項目中使用UART的GPS模塊、藍牙模塊和RFID讀卡器模塊等連接到Raspberry Pi,Arduino或其他微控制器上。
通用異步收發(fā)傳輸器(Universal Asynchronous Receiver/Transmitter),通常稱作UART。它將要傳輸?shù)馁Y料在串行通信與并行通信之間加以轉(zhuǎn)換。作為把并行輸入信號轉(zhuǎn)成串行輸出信號的芯片,UART通常被集成于其他通訊接口的連接上。
它不是像SPI和I2C這樣的通信協(xié)議,而是微控制器中獨立的物理電路或獨立的IC。
UART最好的一點是它只使用兩根線就可以在設備之間傳輸數(shù)據(jù),UART背后的原理很容易理解。
UART通信簡介
在UART通信中,兩個UART直接相互通信。發(fā)送UART將來自CPU等控制設備的并行數(shù)據(jù)轉(zhuǎn)換為串行形式,并將其串行發(fā)送到接收UART,接收UART然后將串行數(shù)據(jù)轉(zhuǎn)換回接收設備的并行數(shù)據(jù)。在兩個UART之間傳輸數(shù)據(jù)只需要兩根線。數(shù)據(jù)從發(fā)送UART的Tx引腳流向接收UART的Rx引腳:
UART以異步方式發(fā)送數(shù)據(jù),這意味著沒有時鐘信號將發(fā)送UART的位輸出與接收UART的位采樣同步。發(fā)送UART不是時鐘信號,而是將開始和停止位添加到正在傳輸?shù)臄?shù)據(jù)包中。這些位定義數(shù)據(jù)包的開始和結(jié)束,因此接收UART知道何時開始讀取位。
當接收UART檢測到起始位時,它開始以稱為波特率的特定頻率讀取輸入位。波特率是數(shù)據(jù)傳輸速度的度量,以每秒位數(shù)(bps)表示。兩個UART必須以大致相同的波特率運行。發(fā)送和接收UART之間的波特率只能相差10%左右。
兩個UART還必須配置為發(fā)送和接收相同的數(shù)據(jù)包結(jié)構(gòu)。
UART如何工作
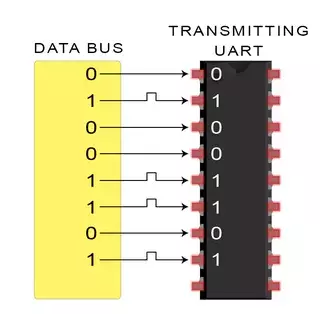
UART傳輸數(shù)據(jù)依靠的是UART總線,數(shù)據(jù)總線用于通過CPU、存儲器或微控制器等其他設備將數(shù)據(jù)發(fā)送到UART。數(shù)據(jù)以并行形式從數(shù)據(jù)總線傳輸發(fā)送到UART。UART從數(shù)據(jù)總線獲得并行數(shù)據(jù)之后,它將添加起始位,奇偶校驗位和停止位,從而創(chuàng)建數(shù)據(jù)包。接下來,數(shù)據(jù)包在Tx引腳上逐位串行輸出。UART接收端則在其Rx引腳上逐位讀取數(shù)據(jù)包。然后,接收UART將數(shù)據(jù)轉(zhuǎn)換回并行形式,并刪除起始位,奇偶校驗位和停止位。最后,接收UART將數(shù)據(jù)包并行傳輸?shù)浇邮斩说臄?shù)據(jù)總線:
UART傳輸?shù)臄?shù)據(jù)被組織成數(shù)據(jù)包。每個數(shù)據(jù)包包含1個起始位,5到9個數(shù)據(jù)位(取決于UART),可選的奇偶校驗位以及1或2個停止位:
1
開始位
當UART數(shù)據(jù)傳輸線不傳輸數(shù)據(jù)時,它通常保持在高電壓電平。為了開始數(shù)據(jù)傳輸,發(fā)送UART將傳輸線從高電平拉至低電平一個時鐘周期。當接收UART檢測到高電壓到低電壓轉(zhuǎn)換時,它開始以波特率的頻率讀取數(shù)據(jù)幀中的位。
2
數(shù)據(jù)框
數(shù)據(jù)框包含要傳輸?shù)膶嶋H數(shù)據(jù)。如果使用奇偶校驗位,則它可以是5位到8位長。如果不使用奇偶校驗位,則數(shù)據(jù)幀可以是9位長。在大多數(shù)情況下,數(shù)據(jù)首先以最低有效位發(fā)送。
3
奇偶校驗位
奇偶校驗描述數(shù)字的均勻性或奇數(shù)。奇偶校驗位是接收UART在傳輸過程中判斷是否有任何數(shù)據(jù)發(fā)生變化的一種方法。電磁輻射、不匹配的波特率或長距離傳輸時,數(shù)據(jù)都有可能發(fā)生變化。接收UART讀取數(shù)據(jù)幀后,它會計算值為1的位數(shù),并檢查總數(shù)是偶數(shù)還是奇數(shù)。
如果奇偶校驗位為0(偶校驗),則數(shù)據(jù)幀中的1位應總計為偶數(shù)。如果奇偶校驗位是1(奇校驗),則數(shù)據(jù)幀中的1位應總計為奇數(shù)。當奇偶校驗位與數(shù)據(jù)匹配時,UART知道傳輸沒有錯誤。但如果奇偶校驗位為0,然而1位應總計為奇數(shù);或者奇偶校驗位是1,并且1位應總計是偶數(shù),則數(shù)據(jù)幀中的位已經(jīng)改變。
4
停止位
為了通知傳輸數(shù)據(jù)包的結(jié)束,UART發(fā)送端會將數(shù)據(jù)傳輸線從低電壓驅(qū)動至高電壓至少兩位持續(xù)時間。
UART傳輸步驟
1)發(fā)送UART從數(shù)據(jù)總線并行接收數(shù)據(jù)↓↓
2)發(fā)送UART將起始位,奇偶校驗位和停止位添加到數(shù)據(jù)幀↓↓
3)整個數(shù)據(jù)包從發(fā)送UART串行發(fā)送到接收UART。接收UART以預先配置的波特率對數(shù)據(jù)線進行采樣↓↓
4)接收UART丟棄數(shù)據(jù)幀中的起始位,奇偶校驗位和停止位↓↓
5)接收UART將串行數(shù)據(jù)轉(zhuǎn)換回并行并將其傳輸?shù)浇邮斩说臄?shù)據(jù)總線↓↓
UART的優(yōu)缺點
優(yōu)點:只使用兩根電線;不需要時鐘信號;有一個奇偶校驗位;只要雙方設置后,就可以改變數(shù)據(jù)包的結(jié)構(gòu);有完整的文檔并且具有廣泛的使用。
缺點:數(shù)據(jù)幀的大小限制為最多9位;不支持多個從屬或多個主系統(tǒng);每個UART的波特率必須在10%之內(nèi)。
責任編輯:lq
-
連接器
+關(guān)注
關(guān)注
99文章
15209瀏覽量
139222 -
調(diào)制解調(diào)器
+關(guān)注
關(guān)注
3文章
872瀏覽量
39424 -
串口通信
+關(guān)注
關(guān)注
34文章
1635瀏覽量
56522
原文標題:還沒搞懂串口通信?一文帶你讀懂
文章出處:【微信號:zhuyandz,微信公眾號:FPGA之家】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
計算機網(wǎng)絡入門指南

刀片計算機設計方案:192-6U VPX i7 刀片計算機
量子計算機與普通計算機工作原理的區(qū)別
工業(yè)計算機類型介紹

計算機接口位于什么之間
簡述計算機總線的分類
UART協(xié)議的工作原理和應用場景
晶體管計算機和電子管計算機有什么區(qū)別
簡單認識UART通信協(xié)議
計算機系統(tǒng)的組成和功能
計算機視覺的工作原理和應用
什么是工業(yè)計算機(IPC)?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論