 FPGA:狀態機簡述
FPGA:狀態機簡述
本文目錄
前言
狀態機簡介
狀態機分類
Mealy 型狀態機
Moore 型狀態機
狀態機描述
一段式狀態機
二段式狀態機
三段式狀態機
狀態機優缺點
總結
擴展-四段式狀態機
01. 前言
狀態機是FPGA設計中一種非常重要、非常根基的設計思想,堪稱FPGA的靈魂,貫穿FPGA設計的始終。
02. 狀態機簡介
什么是狀態機:狀態機通過不同的狀態遷移來完成特定的邏輯操作(時序操作)狀態機是許多數字系統的核心部件, 是一類重要的時序邏輯電路。通常包括三個部分:
下一個狀態的邏輯電路
存儲狀態機當前狀態的時序邏輯電路
輸出組合邏輯電路
03. 狀態機分類
通常, 狀態機的狀態數量有限, 稱為有限狀態機(FSM) 。由于狀態機所有觸發器的時鐘由同一脈沖邊沿觸發, 故也稱之為同步狀態機。
根據狀態機的輸出信號是否與電路的輸入有關分為 Mealy 型狀態機和 Moore 型狀態機
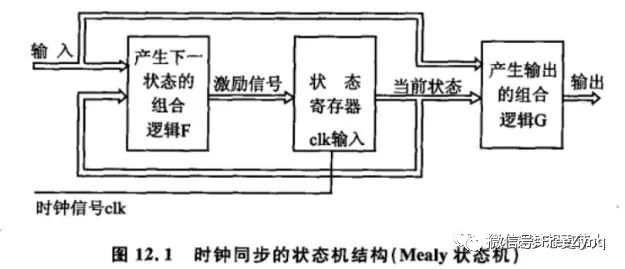
3.1,Mealy 型狀態機
電路的輸出信號不僅與電路當前狀態有關, 還與電路的輸入有關
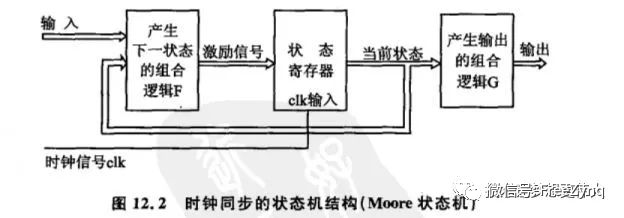
3.2,Moore 型狀態機
電路的輸出僅僅與各觸發器的狀態, 不受電路輸入信號影響或無輸入
狀態機的狀態轉移圖, 通常也可根據輸入和內部條件畫出。一般來說, 狀態機的設計包含下列設計步驟:
根據需求和設計原則, 確定是 Moore 型還是 Mealy 型狀態機;
分析狀態機的所有狀態, 對每一狀態選擇合適的編碼方式, 進行編碼;
根據狀態轉移關系和輸出繪出狀態轉移圖;
構建合適的狀態機結構, 對狀態機進行硬件描述。
04. 狀態機描述
狀態機的描述通常有三種方法, 稱為一段式狀態機, 二段式狀態機和三段式狀態機。
狀態機的描述通常包含以下四部分:
利用參數定義語句 parameter 描述狀態機各個狀態名稱, 即狀態編碼。狀態編碼通常有很多方法包含自然二進制編碼, One-hot 編碼,格雷編碼碼等;
用時序的 always 塊描述狀態觸發器實現狀態存儲;
使用敏感表和 case 語句(也采用 if-else 等價語句) 描述狀態轉換邏輯;
描述狀態機的輸出邏輯。
下面根據狀態機的三種方法來具體說明
4.1,一段式狀態機
1moduledetect_1( 2inputclk_i, 3inputrst_n_i, 4outputout_o 5); 6regout_r; 7//狀態聲明和狀態編碼 8reg[1:0]state; 9parameter[1:0]S0=2'b00; 10parameter[1:0]S1=2'b01; 11parameter[1:0]S2=2'b10; 12parameter[1:0]S3=2'b11; 13always@(posedgeclk_i) 14begin 15if(!rst_n_i)begin 16state<=0; 17????out_r<=1'b0; 18??end 19??else 20????case(state) 21??????S0?: 22??????begin 23????????out_r<=1'b0; 24????????state<=?S1; 25??????end 26??????S1?: 27??????begin 28????????out_r<=1'b1; 29????????state<=?S2; 30??????end 31??????S2?: 32??????begin 33????????out_r<=1'b0; 34????????state<=?S3; 35??????end 36??????S3?: 37????????begin 38????????out_r<=1'b1; 39??????end 40????endcase 41end 42assign?out_o=out_r; 43endmodul 44
一段式狀態機是應該避免使用的, 該寫法僅僅適用于非常簡單的狀態機設計。
4.2,兩段式狀態機
1moduledetect_2( 2inputclk_i, 3inputrst_n_i, 4outputout_o 5); 6regout_r; 7//狀態聲明和狀態編碼 8reg[1:0]Current_state; 9reg[1:0]Next_state; 10parameter[1:0]S0=2'b00; 11parameter[1:0]S1=2'b01; 12parameter[1:0]S2=2'b10; 13parameter[1:0]S3=2'b11; 14//時序邏輯:描述狀態轉換 15always@(posedgeclk_i) 16begin 17if(!rst_n_i) 18Current_state<=0; 19????else 20??????Current_state<=Next_state; 21??end 22??//組合邏輯:描述下一狀態和輸出 23??always@(*) 24??begin 25????out_r=1'b0; 26????case(Current_state) 27??????S0?: 28????????begin 29??????????out_r=1'b0; 30??????????Next_state=?S1; 31????????end 32??????S1?: 33????????begin 34??????????out_r=1'b1; 35??????????Next_state=?S2; 36????????end 37??????S2?: 38????????begin 39??????????out_r=1'b0; 40??????????Next_state=?S3; 41????????end 42??????S3?: 43????????begin 44??????????out_r=1'b1; 45??????????Next_state=Next_state; 46????????end 47????endcase 48??end 49??assign?out_o?=?out_r; 50endmodule 51
兩段式狀態機采用兩個 always 模塊實現狀態機的功能, 其中一個 always 采用同步時序邏輯描述狀態轉移, 另一個 always 采用組合邏輯來判斷狀態條件轉移。
4.3,三段式狀態機
1moduledetect_3( 2inputclk_i, 3inputrst_n_i, 4outputout_o 5); 6regout_r; 7//狀態聲明和狀態編碼 8reg[1:0]Current_state; 9reg[1:0]Next_state; 10parameter[1:0]S0=2'b00; 11parameter[1:0]S1=2'b01; 12parameter[1:0]S2=2'b10; 13parameter[1:0]S3=2'b11; 14//時序邏輯:描述狀態轉換 15always@(posedgeclk_i) 16begin 17if(!rst_n_i) 18Current_state<=0; 19????else 20??????Current_state<=Next_state; 21??end 22??//組合邏輯:?描述下一狀態 23??always@(*) 24??begin 25????case(Current_state) 26??????S0: 27????????Next_state?=?S1; 28??????S1: 29????????Next_state?=?S2; 30??????S2: 31????????Next_state?=?S3; 32??????S3: 33????????begin 34??????????Next_state?=?Next_state; 35????????end 36??????default?: 37??????Next_state?=?S0; 38????endcase 39??end 40??//輸出邏輯:?讓輸出 out,?經過寄存器 out_r 鎖存后輸出,?消除毛刺 41??always@(posedge?clk_i) 42??begin 43????if(!rst_n_i) 44??????out_r<=1'b0; 45????else 46??????begin 47????????case(Current_state) 48??????????S0,S2: 49????????????out_r<=1'b0; 50??????????S1,S3: 51????????????out_r<=1'b1; 52??????????default?: 53????????????out_r<=out_r; 54????????endcase 55??????end 56??end 57 58??assign?out_o=out_r; 59endmodule 60
三段式狀態機在第一個 always 模塊采用同步時序邏輯方式描述狀態轉移, 第二個always 模塊采用組合邏輯方式描述狀態轉移規律, 第三個 always 描述電路的輸出。通常讓輸出信號經過寄存器緩存之后再輸出, 消除電路毛刺。
05. 狀態機優缺點
1、一段式狀態機
只涉及時序電路,沒有競爭與冒險,同時消耗邏輯比較少。
但是如果狀態非常多,一段式狀態機顯得比較臃腫,不利于維護。
2、兩段式狀態機
當一個模塊采用時序(狀態轉移),一個模塊采用組合時候(狀態機輸出),組合邏輯電路容易造成競爭與冒險;當兩個模塊都采用時序,可以避免競爭與冒險的存在,但是整個狀態機的時序上會延時一個周期。
兩段式狀態機是推薦的狀態機設計方法。
3、三段式狀態機
三段式狀態機在狀態轉移時采用組合邏輯電路+格雷碼,避免了組合邏輯的競爭與冒險;狀態機輸出采用了同步寄存器輸出,也可以避免組合邏輯電路的競爭與冒險;采用這兩種方法極大的降低了競爭冒險。并且在狀態機的采用這種組合邏輯電路+次態寄存器輸出,避免了兩段式狀態機的延時一個周期(三段式狀態機在上一狀態中根據輸入條件判斷當前狀態的輸出,從而在不插入額外時鐘節拍的前提下,實現寄存器的輸出)。
三段式狀態機也是比較推崇的,主要是由于維護方便, 組合邏輯與時序邏輯完全獨立。
06. 總結
靈活選擇狀態機,不一定要拘泥理論,怎樣方便怎樣來
07.擴展
四段式不是指三個always代碼,而是四段程序。使用四段式的寫法,可參照明德揚GVIM特色指令Ztj產生的狀態機模板。
明·德·揚四段式狀態機符合一次只考慮一個因素的設計理念。
第一段代碼,照抄格式,完全不用想其他的。
第二段代碼,只考慮狀態之間的跳轉,也就是說各個狀態機之間跳轉關系。
第三段代碼,只考慮跳轉條件。
第四段,每個信號逐個設計。
有興趣的話可以自己去學習一下,或者http://www.mdyedu.com/product/299.html自行看視頻。
責任編輯:xj
原文標題:FPGA 高手養成記-淺談狀態機
文章出處:【微信公眾號:FPGA開源工作室】歡迎添加關注!文章轉載請注明出處。
-
FPGA
+關注
關注
1643文章
21954瀏覽量
613847 -
時鐘
+關注
關注
11文章
1879瀏覽量
132818 -
狀態機
+關注
關注
2文章
493瀏覽量
28060
原文標題:FPGA 高手養成記-淺談狀態機
文章出處:【微信號:leezym0317,微信公眾號:FPGA開源工作室】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
有可能在 FX3 GPIF2 中創建兩個獨立的狀態機嗎?
CX3 GPIF II狀態機獲取錯誤狀態并且無法顯示視頻流怎么解決?
求助,關于srammaster.cydsn中狀態機的問題求解
高速ssd存儲系統中數據緩存控制器流程控制設計
基于FPGA的DS18B20數字溫度傳感器測溫實例
Simulink中的狀態機建模方法 Simulink數據可視化與分析功能
基于狀態機和面向對象的思想設計按鍵檢測模塊

FPGA中有狀態表項的存儲與管理

FPGA算法工程師、邏輯工程師、原型驗證工程師有什么區別?
如何在FPGA中實現狀態機
如何使用FX3同步從屬fifo模式通過FPGA傳輸傳感器數據?
玩轉Spring狀態機





 工商網監
工商網監
評論