") 基于圖卷積的層級(jí)圖網(wǎng)絡(luò)用于基于點(diǎn)云的3D目標(biāo)檢測
基于圖卷積的層級(jí)圖網(wǎng)絡(luò)用于基于點(diǎn)云的3D目標(biāo)檢測

論文:A Hierarchical Graph Network for 3D Object Detection on Point Clouds
由于大多數(shù)現(xiàn)有的點(diǎn)云對(duì)象檢測方法不能充分適應(yīng)點(diǎn)云的特征(例如稀疏性),所以一些關(guān)鍵的語義信息(如物體形狀)不能被很好的捕捉到。本文提出了一種基于層級(jí)圖網(wǎng)絡(luò)(HGNet)的圖卷積(GConv),可以直接將點(diǎn)云作為輸入來預(yù)測 3D 的邊界框。形狀注意圖卷積(SA-GConv)可以通過劍魔點(diǎn)的位置星系來描述物體形狀,基于 SA-GConv 的 U 形網(wǎng)絡(luò)可以通過改進(jìn)的 voting 模塊獲取多層級(jí)的特征進(jìn)而生成候選,然后一個(gè)基于圖卷積的候選推理模塊考慮全局的場景語義來對(duì)邊界框進(jìn)行預(yù)測。該框架在兩個(gè)大規(guī)模點(diǎn)云數(shù)據(jù)上的表現(xiàn)超過了目前最先進(jìn)的模型。
論文背景
由于點(diǎn)云的稀疏性,一些已有的為網(wǎng)格形式數(shù)據(jù)設(shè)計(jì)的方法(如 CNN)在點(diǎn)云上的表現(xiàn)并不好,為解決這一問題,最近有一些對(duì)點(diǎn)云數(shù)據(jù)的方法被提出,例如基于投影的方法、基于體卷積的方法和基于 PointNet 的方法。前兩種試圖將點(diǎn)云數(shù)據(jù)嚴(yán)格轉(zhuǎn)換為網(wǎng)格結(jié)構(gòu)數(shù)據(jù),而后一種則在不明確考慮點(diǎn)的幾何位置的情況下聚合特征。
其他方法相比,PointNet++ 可以保留點(diǎn)的稀疏特點(diǎn),因此被廣泛作為框架的骨架。當(dāng)目前仍有一些未能很好解決的挑戰(zhàn),首先由于沒有考慮點(diǎn)的相對(duì)幾何位置,因此使用 PointNet++ 作為主干忽略了一些局部形狀信息。其次,框架的結(jié)構(gòu)沒有充分利用多級(jí)語義,這可能會(huì)忽略一些有助于目標(biāo)檢測的信息。
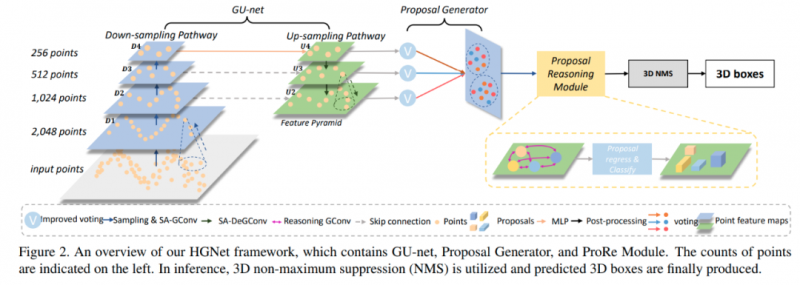
本文提出了一個(gè)基于圖卷積(GCONV)的層級(jí)圖網(wǎng)絡(luò)(HGNet)用于基于點(diǎn)云的 3D 目標(biāo)檢測。HGNet 包含三部分:一個(gè)基于圖卷積的 U 形網(wǎng)絡(luò)(GUnet)、一個(gè)候選生成器以及一個(gè)候選推理模塊(ProRe Module)。基于層級(jí)圖網(wǎng)絡(luò)(HGNet)的圖卷積
整個(gè) HGNet 以端到端的方式進(jìn)行培訓(xùn)。在本文的框架中,點(diǎn)云的局部形狀信息、多級(jí)語義和全局場景信息(候選的特征)已被層級(jí)圖模型充分捕獲、聚合和合并,充分考慮了點(diǎn)云數(shù)據(jù)的特征。
本文的主要貢獻(xiàn)如下:
(A)開發(fā)了一種新的層級(jí)圖網(wǎng)絡(luò)(HGNet),用于在點(diǎn)云上進(jìn)行 3D 對(duì)象檢測,其表現(xiàn)好于已有方法。
(B)提出了一種新穎的 SA-(De)GConv,它可以有效地聚合特征并捕獲點(diǎn)云中對(duì)象的形狀信息。
(C)構(gòu)建了一個(gè)新的 GU-net,用于生成多級(jí)特征,這對(duì)于 3D 對(duì)象檢測至關(guān)重要。
(D)利用全局信息,ProRe 模塊通過對(duì)候選進(jìn)行推理來提高效果。
論文模型
融合采樣
3D 目標(biāo)檢測有基于點(diǎn)和基于體素兩種框架,前者更加耗時(shí),由候選生成與預(yù)測細(xì)化兩個(gè)階段組成。
在第一個(gè)階段,SA 用于降采樣以獲得更高的效率以及擴(kuò)大感受野,F(xiàn)P 用來為降采樣過程中丟掉的點(diǎn)傳播特征。在第二階段,一個(gè)優(yōu)化模塊最優(yōu)化 RPN 的結(jié)果以獲得更準(zhǔn)確的預(yù)測。SA 對(duì)于提取點(diǎn)的特征是必需的。但 FP 和優(yōu)化模塊會(huì)限制效率。
形狀注意圖卷積
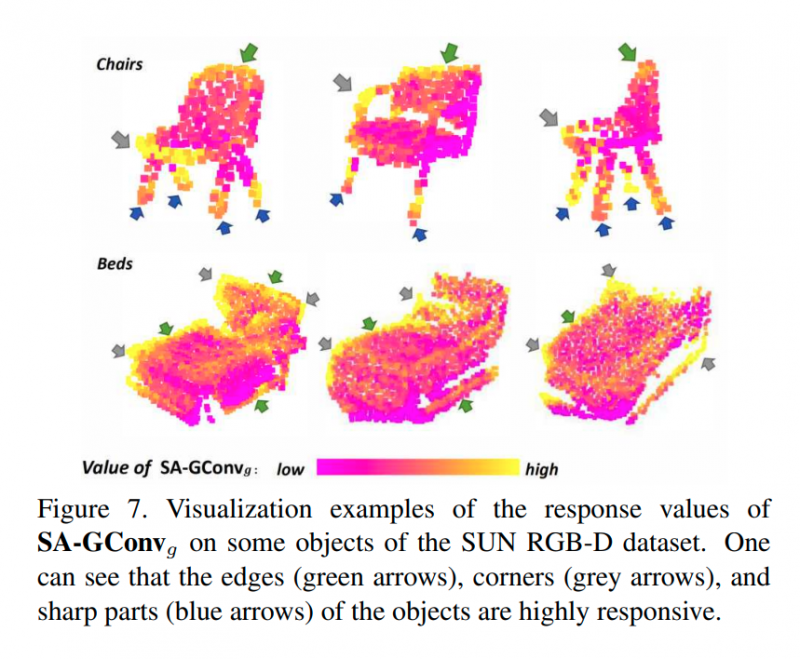
點(diǎn)云通常不能清楚地表示出物體的形狀,可以使用其相鄰點(diǎn)的相對(duì)幾何位置來描述點(diǎn)周圍的局部形狀。本文介紹了一種新穎的形狀注意圖卷積,它通過對(duì)點(diǎn)的幾何位置建模來捕獲對(duì)象形狀。
對(duì)于一個(gè)點(diǎn)集 X,其中每一個(gè)點(diǎn)由其集合位置 p_i 以及 D 維的特征 f_i 組成,我們想要生成一個(gè) X’,本文設(shè)計(jì)了圖卷積用于聚合從 X 到 X’ 的特征。與 PointNet++的采樣層相類似,本文首先從 n 個(gè)點(diǎn)中采樣 n’ 個(gè)點(diǎn),通常 K 最近鄰(KNN)被用來在采樣中保留局部信息將其作為中心點(diǎn)特征。

其中 g 表示 i 和 j 的相對(duì)位置,通過一個(gè)卷積將三維變?yōu)橐痪S,f 是 mlp,然后二者的乘積就是中心點(diǎn)的 knn,其中最大的作為 i 的特征。形狀注意操作不同于簡單的基于 mlp 的操作主要就是因?yàn)檫@個(gè) g 函數(shù)。雖然形式上沒有 attention 中的 softmax 這樣的歸一化,但是 g 的輸出就和 attention 一樣,每個(gè)點(diǎn)的 weights,然后對(duì)應(yīng)的乘以特征。
GU-net
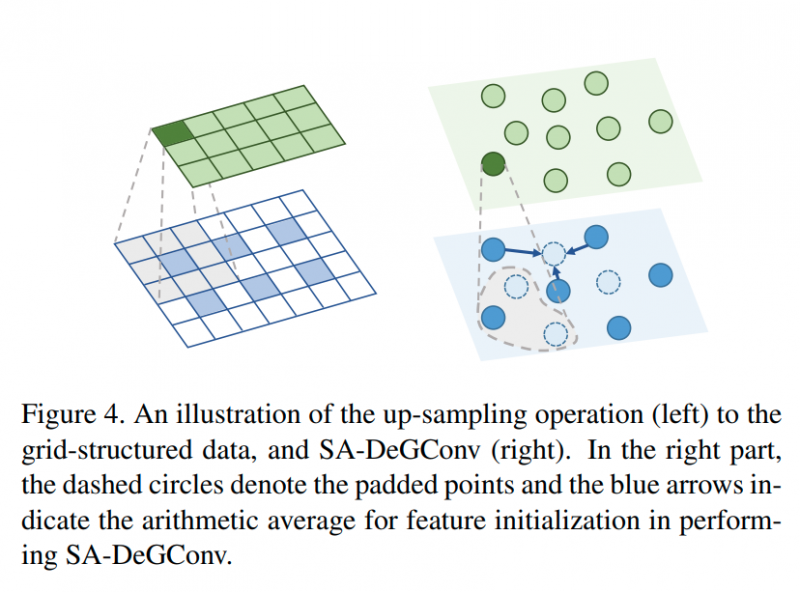
本文設(shè)計(jì)了一個(gè)下采樣模塊,并將其重復(fù)堆疊 4 次以形成下采樣路徑,而將一個(gè)上采樣模塊重復(fù)堆疊兩次以構(gòu)成上采樣方式。類似 FPN、GU-net 生成三張點(diǎn)特征圖的特征金字塔。下采樣使用的是 FPS,然后通過 KNN 構(gòu)建局部區(qū)域,再使用 SA-GConv 更新特征,上采樣模塊的過程與下采樣模塊的過程相反,主要由 SA-GConv 執(zhí)行。
候選生成器
GU-net 生成了包含多級(jí)語義的三張點(diǎn)特征圖。一些先前的方法(如 VoteNet)僅使用一個(gè)特征圖進(jìn)行目標(biāo)預(yù)測。即使通過在上采樣過程中融合較低層的特征來計(jì)算較高層的特征,由于不同層的特征提供了各種語義,因此將多層特征一起用于候選生成會(huì)更加有益。本文提出了一種候選生成器,以改進(jìn)的投票模塊作為主要結(jié)構(gòu)來預(yù)測對(duì)象中心,該模型將多級(jí)特征轉(zhuǎn)換為相同的特征空間。接下來為了聚合特征,通過 FPS 保留 Np 的投票,該做法與 VoteNet 類似,從而融合多級(jí)特征以預(yù)測邊界框及其類別。
候選推理模塊
通過以上幾步,多層局部的語義信息已經(jīng)被很好的捕捉到了,但全局信息還沒有很好的學(xué)到,或者說可能有些目標(biāo)在點(diǎn)云中只體現(xiàn)出很小的一部分表面的點(diǎn),在這樣少的信息下很難正確的將其識(shí)別出來。其推理過程為:

其中 Hp 表示候選特征 tensor,P 表示候選的相對(duì)位置
論文實(shí)驗(yàn)
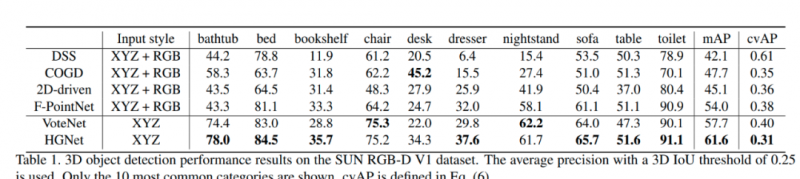
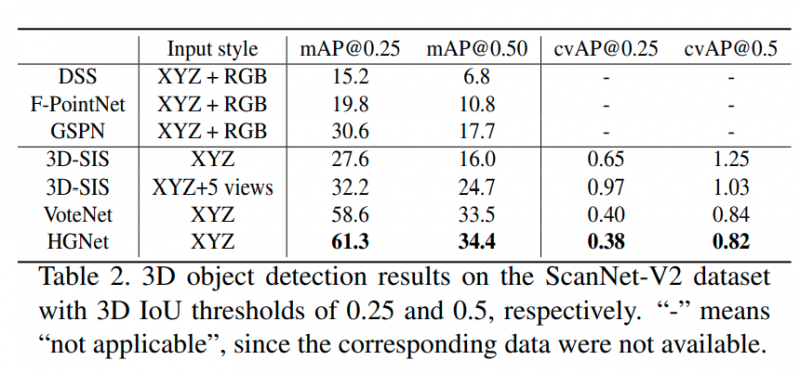
本文在 SUN RGB-D 和 ScanNet-V2 兩個(gè)數(shù)據(jù)集上進(jìn)行了實(shí)驗(yàn)。
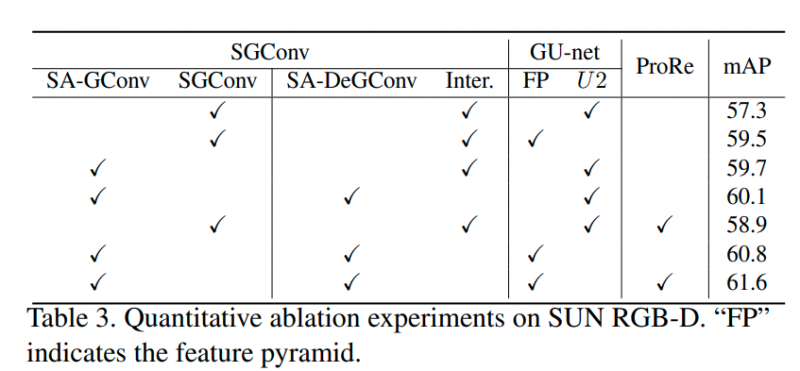
此外,本文還進(jìn)行了消融實(shí)驗(yàn)以證明各模快的有效性。
結(jié)論
本文提出了一種新穎的 HGNet 框架,該框架通過層級(jí)圖建模學(xué)習(xí)語義。
具體來說,作者提出了一種新穎且輕巧的形狀注意圖卷積來捕獲局部形狀語義,該語義聚合了點(diǎn)的相對(duì)幾何位置的特征。基于 SA-GConv 和 SA-DeGConv 構(gòu)建了 GU-net,生成了包含多級(jí)語義的特征金字塔。要素金字塔投票的點(diǎn)將位于相應(yīng)的對(duì)象中心,并且進(jìn)一步聚合多級(jí)語義以生成候選。然后使用 ProRe 模塊在候選之間合并和傳播特征,從而利用全局場景語義來提高檢測性能。最后,對(duì)邊界框和類別進(jìn)行了預(yù)測。
編輯:hfy
-
圖卷積網(wǎng)絡(luò)
+關(guān)注
關(guān)注
0文章
8瀏覽量
1575
發(fā)布評(píng)論請(qǐng)先 登錄
告別漫長等待! 3D測量竟然可以如此的絲滑

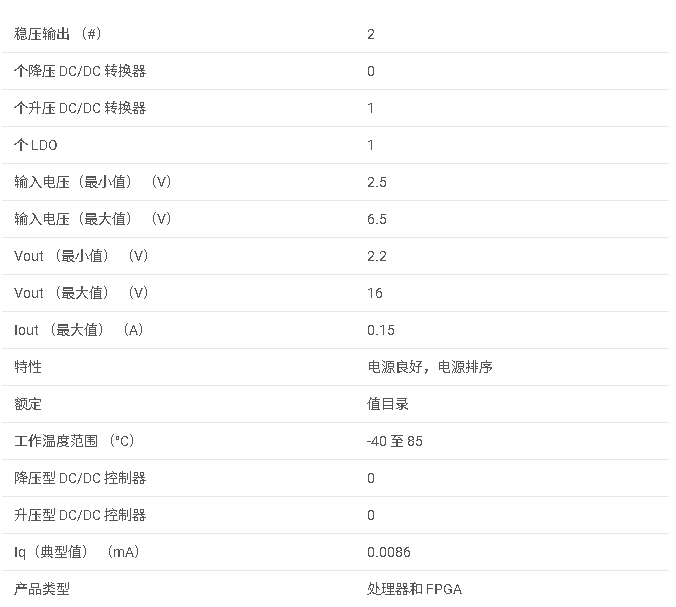
TPS65735 用于主動(dòng)快門 3D 眼鏡的電源管理 IC數(shù)據(jù)手冊(cè)
一種以圖像為中心的3D感知模型BIP3D

對(duì)于結(jié)構(gòu)光測量、3D視覺的應(yīng)用,使用100%offset的lightcrafter是否能用于點(diǎn)云生成的應(yīng)用?
多維精密測量:半導(dǎo)體微型器件的2D&3D視覺方案
C#通過Halcon實(shí)現(xiàn)3D點(diǎn)云重繪
采用華為云 Flexus 云服務(wù)器 X 實(shí)例部署 YOLOv3 算法完成目標(biāo)檢測

AI模型部署邊緣設(shè)備的奇妙之旅:目標(biāo)檢測模型
卷積神經(jīng)網(wǎng)絡(luò)的基本原理與算法
一種基于因果路徑的層次圖卷積注意力網(wǎng)絡(luò)

關(guān)于卷積神經(jīng)網(wǎng)絡(luò),這些概念你厘清了么~
3D霍爾傳感器在掃地機(jī)器人中用于碰撞檢測


安寶特產(chǎn)品 安寶特3D Analyzer:智能的3D CAD高級(jí)分析工具






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論