 基于深度學習的收集透明物體深度數據的光學傳感器算法
基于深度學習的收集透明物體深度數據的光學傳感器算法

在機器人和計算機視覺領域,光學 3D 距離傳感器已經得到了廣泛應用,比如 RGB-D 攝像頭和 LIDAR 傳感器,都在 3D 環境繪制和無人駕駛等任務中扮演了重要角色。
盡管它們性能十分強大,兼具高敏感度、高精度和高可靠性等特質,但在識別透明物體上卻不盡如人意。想要破壞這些傳感器的成像效果,或者讓機械手臂無從下手,只需要在它們面前放上玻璃杯一類的透明物體就可以了,因此難以在不使用其他傳感器的情況下獨立完成特定任務。
這是因為光學傳感器的算法假設所有表面均是理想散射的 (Lambert),即物體會在各個方向和各個角度均勻地反射光線。在 Lambert 光照模型中,無論觀察者的視角如何,其表面亮度都是相同的。
現實中的絕大多數物體符合這一假設,除了透明物體,因為它們的表面既折射又反射光線。這樣一來,光線傳播的復雜性大幅提升,表面亮度與視角無關的假設被破壞了,基于 Lambert 模型的算法也就失效了,導致傳感器收集的透明物體的大多數深度數據都是噪聲或者無效的。
圖 | 透明物體在傳統算法眼中是噪聲(來源:谷歌 AI)
為了改善這一問題,讓機器可以更好地感知透明表面,谷歌 AI,Synthesis AI 和哥倫比亞大學的研究人員合作開發了一種名為 ClearGrasp 的機器學習算法,能夠從 RGB-D 圖像中估算透明物體的準確 3D 數據。
根據谷歌 AI 介紹,在設計之初,ClearGrasp算法就考慮到了兼容性。它可以與任何標準 RGB-D 相機捕捉的數據配合使用,借助神經網絡和深度學習來準確地重建透明物體的景深數據。
圖 | ClearGrasp 算法的工作原理(來源:谷歌 AI)
與目前所使用的技術不同,ClearGrasp 算法不依賴于對透明物體的先驗知識,比如預先對透明物體進行 3D 建模,還要補充觀察視角和光線數據。在神經網絡的幫助下,它可以很好地泛化到從未見過的全新物體身上。
在測試過程中,研究人員將新算法集成到了一套現有的拾取機器人控制系統中,最終發現它對透明塑料物體的抓取成功率有了非常顯著的提升,最多可以提升 6 倍。未來有望在拾取機器人和自動駕駛等領域應用。
透明對象的可視數據集
無論是什么樣的深度學習模型,訓練時都要依賴于大量數據,比如訓練自然語言模型 BERT 需要維基百科,ClearGrasp 也不例外。然而目前廣泛使用的 3D 數據集,包括 Matterport3D 和 ScanNet,都會忽略透明表面和物體,因為標記過程過于復雜和耗時。
這讓研究人員不得不自己創建訓練集和測試集,專門針對透明對象設計。
在訓練數據集中,他們創造了 5 萬多個符合真實物理原則的渲染圖,每張圖片最多包含 5 個透明物體,放置于平面上或者開放式容器中,視角、背景和光線各不相同。每個物體還有配套的表面法線(曲率)、分割蒙版、邊緣和深度等信息,用于訓練各種 2D 和 3D 物體檢測任務。
至于測試集,研究團隊選擇用真實場景創建圖片和數據,方便最大程度上測試算法的真實表現。這是一個十分痛苦的過程,因為對于每個場景都要在保證視角、光線和場景布置完全一致的情況下照兩遍:第一遍用透明物體,第二遍用一模一樣的非透明物體替換它們(必須保證位置完全一樣)。
最終他們得到了 286 個真實場景測試圖,其中不僅包括透明物體本身,還有各種不同的背景貼圖和隨機不透明物體。圖片中既包含訓練集中存在的已知對象,也包括從未出現過的新物體。
在數據集的問題解決之后,下一步是思考如何收集透明物體的深度數據。
雖然在透明物體上,RGB-D 經典的深度估算方法無法給出準確數據,但仍然有一些蛛絲馬跡暗示了物體的形狀。最重要的一點是,透明表面會出現鏡面反射,在光線充足的環境中會顯示成亮點,在 RGB 圖像中非常明顯,而且主要受到物體形狀的影響。
因此,卷積神經網絡可以利用這些反射數據推斷出準確的表面法線,然后將其用于深度估算。
另一方面,大多數機器學習算法都嘗試直接從單眼 RGB 圖像中估計深度,不過即使對于人類而言,這也是一個困難的任務。尤其在背景表面比較平滑時,現有算法對深度的估計會出現很大的誤差。這也會進一步加大透明物體深度的估算誤差。
基于此,研究人員認為與其直接估算透明物體深度,不如矯正 RGB-D 相機的初始深度估算數據。這樣更容易實現,還可以通過非透明表面的深度來推算透明表面的深度。
ClearGrasp 算法
ClearGrasp 算法使用了三個神經網絡:一個用于估計表面法線,一個用于分析受遮擋邊界(深度不連續),另一個給透明對象罩上蒙版。蒙版負責刪除透明對象的所有像素,以便填充上正確的深度數據。
研究人員使用了一種全局優化模塊,可以預測表面法線并利用其來引導形狀的重建,實現對已知表面深度的拓展,還可以利用推算出的遮擋邊界來保持不同物體之間的分離狀態。
由于研究人員創建的數據集存在局限性,比如訓練圖片只包含放在地平面上的透明物體,因此初期的 ClearGrasp 算法判斷墻壁等其他表面法線的表現很差。為了改善這一問題,他們在表面法線估算訓練中加入了 Matterport3D 和 ScanNet 數據集中的真實室內場景,雖然沒有透明物體,但針對真實場景的訓練有效提高了算法估算表面法線的準確率。
圖 | 三套神經網絡各有不同分工(來源:谷歌 AI)
為了系統分析 ClearGrasp 的性能,研究人員分別利用 RGB-D 數據和 ClearGrasp 數據構造了 3D 點云。點云顯示了算法所生成的 3D 表面形狀干凈且連貫,沒有原始單眼深度估算法中常見的鋸齒狀噪聲,而且還可以分辨復雜圖案背景下的透明物體,以及區分相互遮擋的透明物體。
最重要的是,ClearGrasp 輸出深度數據可以直接控制依賴于 RGB-D 圖像的機械臂。
研究人員使用了 UR5 工業機械臂進行測試,將其原始傳感器數據替換成 ClearGrasp 輸出深度數據后,它的透明物體抓取成功率得到了顯著改善:平行夾爪的成功率從 12% 大幅提升到 74%,吸爪的成功率從 64% 提升到 86%。
雖然分辨透明物體的準確率已經有了大幅提升,但新算法仍然有很大的進步空間。
研究人員認為,受到訓練數據集和傳統路徑跟蹤及渲染算法的局限性影響,ClearGrasp 仍然不能準確分辨散焦線,經常會把明亮的散焦線和物體陰影混淆為獨立的透明物體。這將是未來的重要研究方向之一。
研究人員相信,這項研究成果證明了,基于深度學習的深度數據重建方法足以勝過傳統方法,使機器能夠更好地感知透明表面,不僅有望提高 LIDAR 無人駕駛等技術的安全性,而且還可以在多變的應用場景中開啟新的交互方式,讓分類機器人或者室內導航等技術更加高效和可靠。
編輯:hfy
-
機器人
+關注
關注
213文章
29730瀏覽量
212833 -
計算機視覺
+關注
關注
9文章
1708瀏覽量
46772 -
距離傳感器
+關注
關注
3文章
76瀏覽量
15437 -
深度學習
+關注
關注
73文章
5561瀏覽量
122792
發布評論請先 登錄
技術指南丨深視智能點光譜共焦位移傳感器測量透明物體厚度操作指南

光學傳感器的工作原理與應用
安森美這款iToF傳感器讓3D深度測量技術輕松落地

BP神經網絡與深度學習的關系
深度數智DC-ROMA RISC-V Laptop II入選IEEE Spectrum“Top Tech 2025”

激光雷達技術的基于深度學習的進步
AI大模型與深度學習的關系
FPGA做深度學習能走多遠?
深度識別與多目標識別傳感器的區別
基于大數據與深度學習的穿戴式運動心率算法
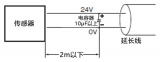
限定反射型光學傳感器B5W-LB的線纜可以延長多少?





 工商網監
工商網監
評論