 探索柔性機器的彎曲和螺旋氣動人工肌肉設計
探索柔性機器的彎曲和螺旋氣動人工肌肉設計
柔性機器人具有良好的順從性、高度的運動靈活性、優異的環境適應性,正逐步向醫療、教育、家庭、服務等與人類生活更加密切的全新領域拓展,在人類社會扮演著越來越重要的角色,為未來智能社會夯實基礎。
哈爾濱工業大學近期在《Soft Robotics》雜志上發表了最新研究成果“Novel Bending and Helical Extensile/Contractile Pneumatic Artificial Muscles Inspired by Elephant Trunk”,研制了一系列伸長型和收縮型的彎曲或螺旋氣動人工肌肉(Pneumatic Artificial Muscles, PAM),作者通過建立數學模型和性能表征實驗等方法,以具象的三維曲面簇的形式對軸向、彎曲和螺旋氣動人工肌肉進行了系統的分析與研究,為研究和設計人員提供了一個可靠的設計參考圖譜。
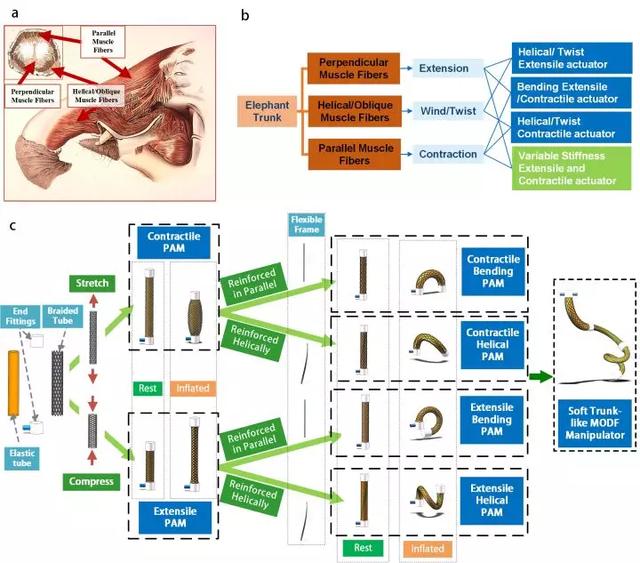
圖1:象鼻肌肉纖維啟發的彎曲與螺旋氣動人工肌肉
作者通過一個仿象鼻的多自由度柔性臂來探索彎曲和螺旋氣動人工肌肉在柔性機器人領域的潛在應用。收縮式氣動人工具有很大的輸出或負載能力,而伸長型氣動人工肌肉可以產生更多的變形。所以研究者根據不同驅動器的輸出特性,第一段使用收縮式彎曲氣動人工肌肉以承受最大的載荷,第二部分利用伸長式彎曲氣動人工肌肉提供更大的運動范圍。同時,螺旋型氣動人工肌肉被安裝在末端,以模仿象鼻的動作抓住各種物體。整個柔性臂的總長度和最大直徑分別為65.5 cm和2.5 cm,因此,柔性機械手的長度/直徑比可達26.2,甚至比真正的象鼻還要大。
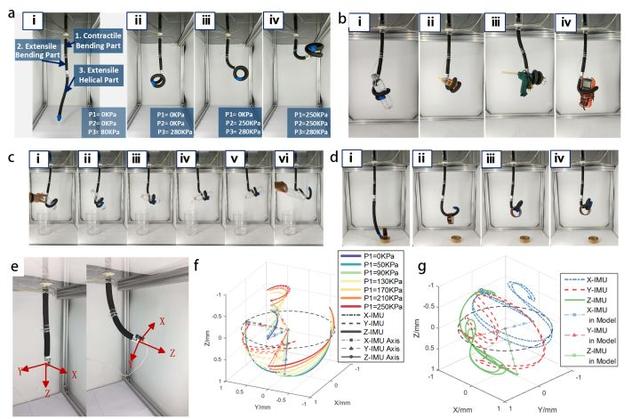
圖2:仿生象鼻抓取物體和三維運動空間
哈爾濱工業大學冷勁松教授團隊與美國馬里蘭大學Norman M. Wereley教授團隊合作完成此項工作,論文通訊作者為冷勁松教授,第一作者為哈爾濱工業大學管清華博士,研制的軸向、彎曲和螺旋氣動人工肌肉具有優異的適應性、靈活性和可設計性,可以被廣泛地應用于運動輔助外骨骼、可穿戴設備、生物醫療機器人、柔性分類機器人、搜索機器人等。
-
可穿戴設備
+關注
關注
55文章
3837瀏覽量
168260 -
柔性機器人
+關注
關注
1文章
39瀏覽量
4744
發布評論請先 登錄
工業機器人工作站的建設意義
JCMsuite應用:彎曲單模光纖
柔性網線和非柔性網線區別有哪些

英偉達計劃推出驅動人形機器人新技術
安泰ATA-3080C功率放大器在螺旋載荷下管中彎曲模態導波研究中的應用
ATA-7030高壓放大器在電致變形柔性致動器表情機器人實驗中的應用

ATA-3080C功率放大器在螺旋載荷下管中彎曲模態導波研究中的應用

《AI for Science:人工智能驅動科學創新》第6章人AI與能源科學讀后感

abb機器人工具坐標系問題
探索電路板pcb螺旋走線的特點
柔性機器人與剛性機器人區別與聯系

電線電纜曲繞試驗機,高柔性拖鏈電纜曲繞試驗機






 工商網監
工商網監
評論