 磁響應材料和雙穩態Kresling型折紙結構構成了一種新型的多功能驅動器
磁響應材料和雙穩態Kresling型折紙結構構成了一種新型的多功能驅動器
于民間的折紙(Origami)藝術不僅具有藝術審美價值,還蘊含數學運算和空間幾何原理。近些年來,折紙在科學界引起了越來越多的關注,已經被廣泛運用到了航天、生物醫療等領域,這些應用利用了折紙藝術變形特性來建立各式各樣多功能、易展開、可變特性的系統。可靠的變形需要合適的驅動,目前常用的驅動方式包括機械、氣動或者以形狀記憶高分子為代表的智能材料,然而現有的方法往往具有驅動器體積龐大,驅動系統復雜,導線氣動軟管束縛,響應速度慢,或不易實現分布式控制等缺點。
俄亥俄州立大學趙芮可教授團隊和佐治亞理工學院Glaucio H. Paulino教授團隊將磁響應材料和雙穩態Kresling型折紙結構結合構成一種新型的多功能驅動器,通過編輯磁場大小方向及磁響應材料的磁化方向,可以遠程控制驅動器在0.1s內實現狀態切換,并瞬間鎖定形狀。更重要的是無需增加任何部件即可實現Kresling驅動器裝配體的分布式控制(Distributed actuation),僅通過控制單一磁場就能實現多個驅動單元的獨立控制,大大降低了系統復雜性。除此之外,Kresling驅動器還展示了可調的機械剛度(Tunable Stiffness)特性及集成驅動和計算(Integrated actuation and computing)于一體的能力,展示了機器人應用的潛力。 研究成果于北京時間2020年9月15日以 “Untethered control of functional origami micro-robots with distributed actuation” 為題發表在《美國國家科學院院刊》(PNAS)上。
Kresling驅動單元的磁驅動原理如圖1所示,首先將磁化后的磁片粘貼在折紙結構頂端,若外加磁場的方向與磁片的磁化方向不同,將產生趨向于磁場方向的轉矩,通過控制磁場的方向和大小,當磁轉矩在驅動單元旋轉的過程中始終大于所需要克服的轉矩(圖一C中的紫色區域),則驅動單元可以克服折紙結構的能量壁壘,在折疊狀態和展開狀態之間快速切換 (視頻一)。
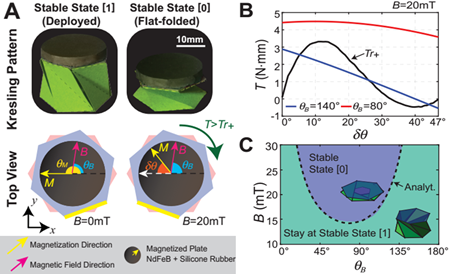
圖一:Kresling驅動單元的驅動原理
視頻一 當多個Kresling驅動單元層疊在一起組成裝配體,通過設計區分各單元上磁片的磁化方向,各單元所受磁轉矩的大小和方向不同,可以實現裝配體各單元的同時驅動和分布式控制。例如圖二中由兩個相同單元組成的裝配體,在完全折疊狀態下,上下兩個磁片的磁化方向相差90°,通過調節外加磁場大小和方向,裝配體可以從完全折疊狀態驅動為其他三種狀態。 基于分布式控制的原理,當Kresling驅動器裝配體變為另外一個狀態后,各單元上磁片的磁化方向也相應的發生變化,此時驅動所需的磁場方向和大小也會發生變化,通過合理設計和計算,裝配體在任意狀態之間可以實現直接或者間接的快速切換。
圖二:Kresling驅動器裝配體的多單元分布式控制原理
視頻二
圖三:Kresling驅動器裝配體各狀態間的循環驅動
視頻三 研究團隊進一步研究了Kresling型驅動器各單元獨立控制并協同作用帶來的潛在應用。對于驅動單元,通過對折紙結構的設計可以獲得不同的能量壁壘,具體到本文,折紙高度越高則能量壁壘越大。當四個高度不同的單元層疊成裝配體時,由于每個單元的剛度均不同,裝配體結構可以隨著狀態的切換獲得16種不同的剛度特性,配合磁驅動可以用來設計剛度快速可調的阻尼器。
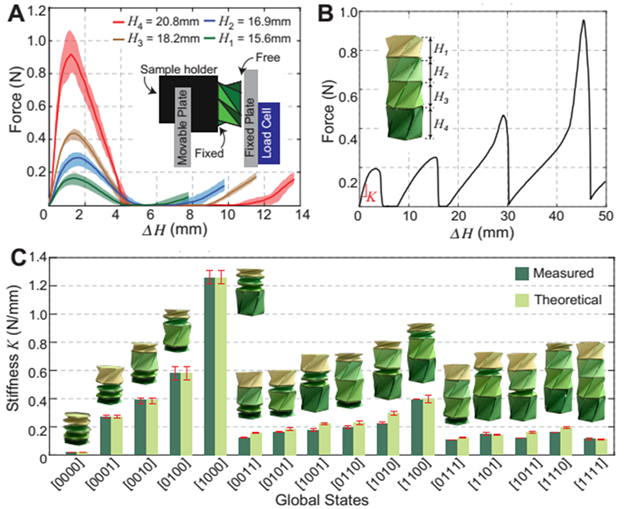
圖四:Kresling驅動器的可調剛度特性 除此之外,雙穩態Kresling驅動器具有與施密特觸發器類似的特性,將輸入轉矩看成輸入信號,機械狀態看成輸出信號(展開狀態為二進制輸出1,折疊狀態為二進制輸出0),則輸入轉矩與輸出數字狀態0和1之間具有固定的關系。與傳統施密特觸發器相比,一方面,雙穩態Kresling驅動器的可以實現相似的模數轉換和信息存儲功能(如圖五和視頻四中展示的三位存儲器,分布式控制驅動實現存儲信息的改變,LED實時顯示存儲的信息),更重要的一方面,Kresling驅動器還可以被動的感應外界負載的大小并通過磁驅動主動的做出響應,因此集成了驅動、傳感和計算的功能于一體,完美契合機器人所需要的感應-決策-響應的所有功能,是新一代智能機器人系統的潛在方案。
圖五:基于Kresling驅動器的數字存儲電路
視頻四
該工作提出使用磁場無線驅動復雜的折紙結構裝配體,瞬間響應的特性和簡單的系統設計克服了傳統驅動方式的諸多缺點,同時僅需要一個輸入源即可以實現復雜裝配體的分布式控制。團隊成員表示希望下階段的工作可以實現驅動器的運動,結合集成的傳感和計算功能,將磁驅動折紙應用在智能機器人領域。 本文通過結構的雙穩態特性實現了形狀鎖定(shape-locking),趙芮可教授團隊和佐治亞理工的齊航教授團隊今年還通過設計一種新的材料,即磁驅形狀記憶高分子(Magnetic shape memory polymer, M-SMP)來實現形狀鎖定,該材料可通過控制磁加熱和磁驅動實現低溫形狀鎖定和高溫快速變形,相關成果發表在《先進材料》(Advanced Materials)上。磁驅形狀記憶高分子材料 – 形狀記憶與快速形變的完美結合?
團隊介紹:該工作由俄亥俄州立大學軟智能材料實驗室(Soft Intelligent Materials Laboratory,鏈接: http://zhaor.engineering.osu.edu)和佐治亞理工學院計算力學實驗室(Prof. Glaucio H. Paulino's Computational Mechanics Research Group,鏈接: http://paulino.ce.gatech.edu/index.html)共同完成。該工作的通訊作者為趙芮可教授和Glaucio H. Paulino教授,共同第一作者為佐治亞理工學院博士生Larissa S. Novelino,俄亥俄州立大學博士后迮棄疾博士,以及俄亥俄州立大學博士生吳帥。
論文鏈接:
https://www.pnas.org/content/early/2020/09/11/2013292117
原文標題:PNAS:多功能磁集成Origami的分布式控制
文章出處:【微信公眾號:知社學術圈】歡迎添加關注!文章轉載請注明出處。
-
驅動器
+關注
關注
54文章
8640瀏覽量
149155 -
材料
+關注
關注
3文章
1323瀏覽量
27742
原文標題:PNAS:多功能磁集成Origami的分布式控制
文章出處:【微信號:zhishexueshuquan,微信公眾號:知社學術圈】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監
評論