") 工業(yè)機(jī)器人和機(jī)床應(yīng)用的時(shí)序挑戰(zhàn)分析
工業(yè)機(jī)器人和機(jī)床應(yīng)用的時(shí)序挑戰(zhàn)分析

工業(yè)機(jī)器人和機(jī)床應(yīng)用的時(shí)序挑戰(zhàn)分析
工業(yè)機(jī)器人和機(jī)床應(yīng)用涉及加工空間中多個(gè)軸的精確、協(xié)調(diào)運(yùn)動(dòng)。機(jī)器人通常具有六個(gè)需要統(tǒng)籌控制的軸,如果機(jī)器人可沿軌道移動(dòng),則將會(huì)有七個(gè)軸。盡管有應(yīng)用會(huì)使用到多達(dá)12個(gè)軸,其中刀具和工件均在空間進(jìn)行相對(duì)移動(dòng),但在數(shù)控加工中,5軸加工屬于較為常見(jiàn)的應(yīng)用。每個(gè)軸由一個(gè)伺服驅(qū)動(dòng)器和一個(gè)電機(jī)組成,有時(shí)還包括一個(gè)位于電機(jī)和軸接頭或末端執(zhí)行器之間的齒輪箱。系統(tǒng)通過(guò)工業(yè)以太網(wǎng)進(jìn)行互連,通常采用線(xiàn)路拓?fù)浣Y(jié)構(gòu),如圖1所示。機(jī)床控制器將所需的空間軌跡轉(zhuǎn)換為每個(gè)伺服軸的單獨(dú)位置參考,并通過(guò)網(wǎng)絡(luò)周期性地進(jìn)行通信。
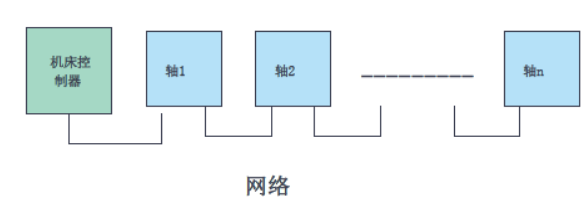
圖 1:多軸機(jī)床的網(wǎng)絡(luò)拓?fù)洹?/p>
控制周期
此類(lèi)應(yīng)用在規(guī)定的周期時(shí)間內(nèi)運(yùn)行,該周期通常等于或者是基礎(chǔ)伺服電機(jī)驅(qū)動(dòng)的基本控制/脈沖寬度調(diào)制(PWM)開(kāi)關(guān)周期的數(shù)倍。因此,端到端網(wǎng)絡(luò)傳輸時(shí)延構(gòu)成了一大關(guān)鍵參數(shù),如圖2所示。在每個(gè)周期內(nèi),新的位置參考和其他相關(guān)信息必須從機(jī)床控制器傳輸?shù)綀D1的每個(gè)節(jié)點(diǎn)。然后每個(gè)節(jié)點(diǎn)要在PWM周期內(nèi)能有足夠的時(shí)間來(lái)使用新的位置參考以及任何新的傳感器數(shù)據(jù)更新伺服控制算法計(jì)算。每個(gè)節(jié)點(diǎn)將通過(guò)基于工業(yè)以太網(wǎng)協(xié)議的分布式時(shí)鐘機(jī)制,在同一時(shí)間點(diǎn)將更新后的PWM矢量應(yīng)用到伺服驅(qū)動(dòng)器中。根據(jù)控制結(jié)構(gòu)的不同,部分控制回路算法可在PLC中實(shí)現(xiàn),并在通過(guò)網(wǎng)絡(luò)接收到任何相關(guān)傳感器信息更新后,需要足夠的響應(yīng)時(shí)間才可使用。
PWM周期 PWM周期
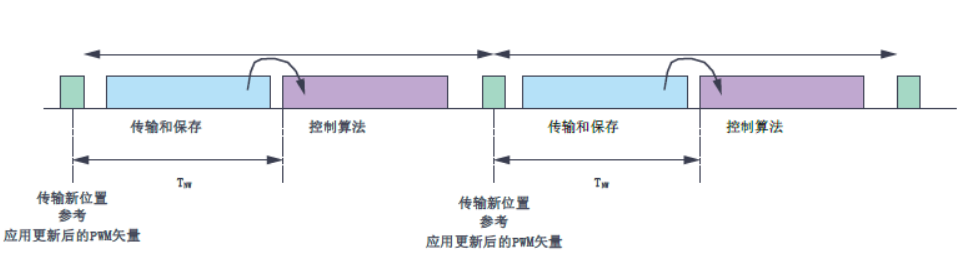
圖 2:PWM周期和網(wǎng)絡(luò)傳輸時(shí)間。
數(shù)據(jù)傳輸延遲
假設(shè)網(wǎng)絡(luò)上唯一的流量來(lái)自機(jī)床控制器和伺服節(jié)點(diǎn)之間的周期性數(shù)據(jù),則網(wǎng)絡(luò)時(shí)延(TNW)將受到最遠(yuǎn)節(jié)點(diǎn)的網(wǎng)絡(luò)躍點(diǎn)數(shù)、網(wǎng)絡(luò)數(shù)據(jù)速率和每個(gè)節(jié)點(diǎn)遇到的延遲影響。在機(jī)器人和機(jī)床環(huán)境中,因?yàn)榫€(xiàn)纜長(zhǎng)度通常相對(duì)較短,信號(hào)沿線(xiàn)路的傳播延遲可忽略。主要的延遲來(lái)自帶寬延遲;及將數(shù)據(jù)傳輸?shù)骄€(xiàn)路所需的時(shí)間。對(duì)于最小尺寸的以太網(wǎng)幀(通常用于機(jī)床和機(jī)器人控制),100Mbps和1Gbps比特率的帶寬延遲如圖3所示。此方法可簡(jiǎn)單地通過(guò)數(shù)據(jù)包大小除以數(shù)據(jù)速率得出結(jié)果。從控制器到伺服的多軸系統(tǒng)的典型數(shù)據(jù)有效負(fù)載包括一個(gè)4字節(jié)速度/位置參考更新和每個(gè)伺服的一個(gè)1字節(jié)控制字更新,這意味著6軸機(jī)器人的有效載荷為30字節(jié)。當(dāng)然,有些應(yīng)用在更新時(shí)會(huì)攜帶更多的信息和/或采用更多的軸,在這種情況下,可能需要大于最小尺寸的數(shù)據(jù)包。

圖 3:最小長(zhǎng)度以太網(wǎng)幀的帶寬延遲。
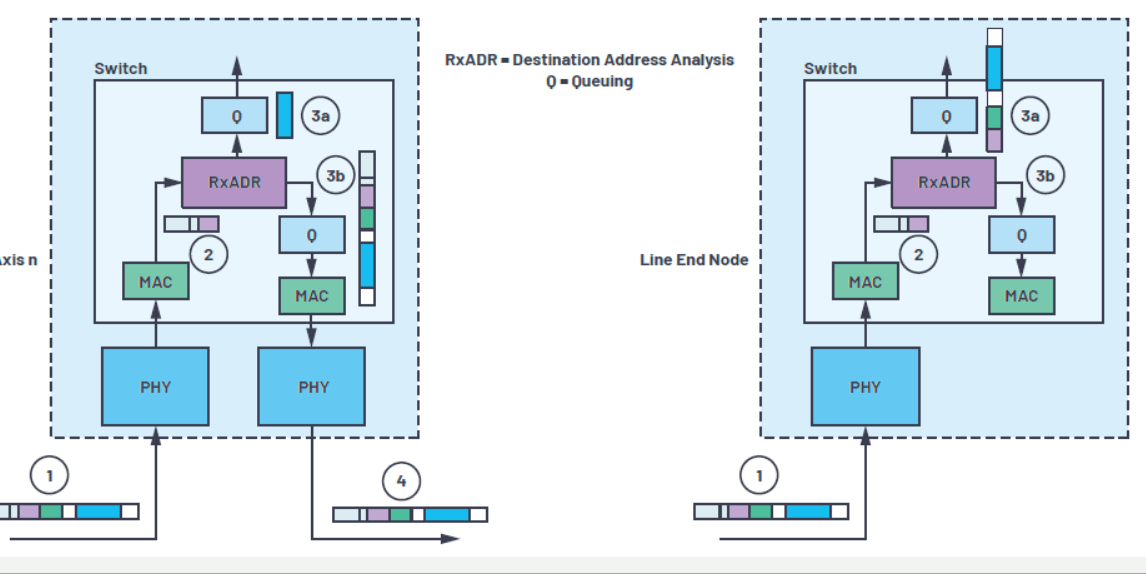
圖4幀時(shí)延:(a)2端口節(jié)點(diǎn)幀時(shí)延和(b)線(xiàn)路端節(jié)點(diǎn)。

圖5:幀傳輸時(shí)間表。
低延遲解決方案
ADI最近發(fā)布了兩款新型工業(yè)以太網(wǎng)PHY,針對(duì)惡劣的工業(yè)條件可以高達(dá)105°C的環(huán)境溫度可靠運(yùn)行,并具有行業(yè)領(lǐng)先的功耗和時(shí)延規(guī)格。ADIN1300和ADIN1200專(zhuān)為解決本文概述的挑戰(zhàn)而開(kāi)發(fā),并為工業(yè)應(yīng)用提供了理想的選擇。借助fido5000實(shí)時(shí)以太網(wǎng)、多協(xié)議、嵌入式2端口交換機(jī),ADI為確定性時(shí)間敏感型應(yīng)用提供了解決方案。
表1列出了PHY和交換機(jī)引入的時(shí)延,其中假設(shè)接收緩存分析基于目的地地址,并且采用100Mbps網(wǎng)絡(luò)環(huán)境運(yùn)行。

例如,將這些延遲匯總到一個(gè)7軸線(xiàn)路網(wǎng)絡(luò),并將整個(gè)有效負(fù)載的時(shí)鐘輸入到最終節(jié)點(diǎn)(圖4中的3a),則總傳輸延遲變?yōu)?/p>
6 × TL_1node + TBW + Tnode7 =
6 × (248 ns + 330 ns + 1120 ns + 52 ns ) + 5760 ns + (1)
(248 ns + 1120 ns + 58 × 80 ns) = 22.3 μs
其中,58×80ns表示前導(dǎo)碼和目標(biāo)地址字節(jié)被讀取后剩余的58字節(jié)有效負(fù)載。
此計(jì)算假定網(wǎng)絡(luò)上不存在其他流量,或者對(duì)網(wǎng)絡(luò)進(jìn)行管理以啟用時(shí)間敏感型流量的優(yōu)先級(jí)訪(fǎng)問(wèn)。這在某種程度上也依賴(lài)于協(xié)議,根據(jù)所使用的具體工業(yè)以太網(wǎng)協(xié)議,在計(jì)算中會(huì)存在一些細(xì)微的變化。回到圖2,在周期時(shí)間低至50μs到100μs的機(jī)床系統(tǒng)中,到最遠(yuǎn)節(jié)點(diǎn)的幀傳輸可能占用幾乎50%的周期,從而減少了更新下一個(gè)周期的電機(jī)控制和運(yùn)動(dòng)控制算法計(jì)算的可用時(shí)間。最大限度地降低傳輸時(shí)間對(duì)于性能優(yōu)化非常重要,因?yàn)樗軌蛑С指L(zhǎng)和更復(fù)雜的控制計(jì)算。考慮到與線(xiàn)路上的數(shù)據(jù)相關(guān)延遲是固定的并且與比特率有關(guān),利用低時(shí)延組件(如ADIN1200 PHY和fido5000嵌入式交換機(jī))成為了性能優(yōu)化的關(guān)鍵,尤其是當(dāng)節(jié)點(diǎn)數(shù)增加(例如,12軸數(shù)控機(jī)床)和周期時(shí)間減少時(shí)。升級(jí)千兆位以太網(wǎng)能夠顯著減少帶寬延遲的影響,但是增加了交換機(jī)和PHY組件引入的總時(shí)延的占比。例如,千兆位網(wǎng)絡(luò)上的12軸數(shù)控機(jī)床的網(wǎng)絡(luò)傳輸延遲約為7.5μs。帶寬因素可忽略不計(jì),使用最小或最大以太網(wǎng)幀大小幾乎沒(méi)有區(qū)別。網(wǎng)絡(luò)延遲在PHY和交換機(jī)之間大致平均分配,這顯示了隨著工業(yè)系統(tǒng)向千兆速度發(fā)展、控制周期時(shí)間縮短(EtherCAT?已經(jīng)演示過(guò)12.5μs周期時(shí)間),最大限度減少這些因素中時(shí)延的價(jià)值,以及節(jié)點(diǎn)數(shù)隨著控制網(wǎng)絡(luò)中連接以太網(wǎng)傳感器的增加和網(wǎng)絡(luò)拓?fù)涞谋馄交粩嘣鲩L(zhǎng)。
結(jié)論
在高性能、多軸、同步運(yùn)動(dòng)應(yīng)用中,控制時(shí)序要求精確、確定且時(shí)間要求嚴(yán)格,還需要最大限度地減少端到端時(shí)延,尤其是當(dāng)控制周期時(shí)間變短以及控制算法復(fù)雜度增加時(shí)。低時(shí)延PHY和嵌入式直通交換機(jī)是優(yōu)化這些系統(tǒng)的重要因素。為了應(yīng)對(duì)其中,58×80ns表示前導(dǎo)碼和目標(biāo)地址字節(jié)被讀取后剩余的58字節(jié)有效負(fù)載。
此計(jì)算假定網(wǎng)絡(luò)上不存在其他流量,或者對(duì)網(wǎng)絡(luò)進(jìn)行管理以啟用時(shí)間敏感型流量的優(yōu)先級(jí)訪(fǎng)問(wèn)。這在某種程度上也依賴(lài)于協(xié)議,根據(jù)所使用的具體工業(yè)以太網(wǎng)協(xié)議,在計(jì)算中會(huì)存在一些細(xì)微的變化。回到本文中所列的挑戰(zhàn),ADI最近發(fā)布了兩款新型強(qiáng)大工業(yè)以太網(wǎng)PHY,ADIN1300(10Mb/100Mb/1Gb)和ADIN1200(10Mb/100Mb)。
-
工業(yè)機(jī)器人
+關(guān)注
關(guān)注
91文章
3457瀏覽量
94129 -
機(jī)床
+關(guān)注
關(guān)注
1文章
638瀏覽量
31188
發(fā)布評(píng)論請(qǐng)先 登錄
基于A(yíng)DI新工業(yè)以太網(wǎng)PHY方案解決工業(yè)機(jī)器人和機(jī)床應(yīng)用中的挑戰(zhàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論