 基于MSP430設計的低功耗智能垃圾桶
基于MSP430設計的低功耗智能垃圾桶
本文利用低功耗的MSP430單片機作為主控芯片,用NB-IoT 作為通訊模塊,設計一款低功耗、可廣覆蓋、大規模部署的智能垃圾桶,且配置的 NB-IoT 模塊可為實現遠程管理和控制提供支持。克服了現有研究中智能垃圾桶 功耗大、報警功能單一、分布距離受限制、移植性差的問題。
1 系統硬件模塊設計
垃圾桶的主控芯片為低功耗的MSP430單片機,當沒有采集數據和發送數據任務時,單片機進入休眠狀態,以降低功 耗。通訊模塊使用 NB-IoT 無線模塊,NB-IoT 使用電信運營商的基站發送數據,既保證了通信質量的可靠性,也省去了像 短距離無線通信技術自組網的復雜步驟。傳感器和按鍵等 外設都是預留的接口,可以編寫不同的程序以驅動不同的 外設來實現不同場景下對垃圾桶功能的需求,具有很強的 移植性。
1.1傳感器檢測模塊
本文設計的垃圾桶使用超聲波傳感器和重力傳感器同時 檢測垃圾桶滿溢狀態,可有效避免垃圾桶虛滿情況。
1.1.1超聲波測距模塊
該垃圾桶使用 HC-SR04 超聲波測距模塊。超聲波傳感器放置在垃圾桶上方的側面,用于測量垃圾桶內垃圾的高度。
MSP430 單片機給超聲波傳感器的Trig 引腳大于 10 s 的高電平信號,超聲波模塊就會自動發送 8 個 40KHz 的超聲波脈沖,并自動檢測是否有信號返回。若檢測到返回信號,Echo引腳會輸出高電平,高電平持續的時間就是超聲波從發射到 返回的時間 t,這樣就可以計算出垃圾桶內的垃圾高度 s。但此時超聲波模塊的測量結果,并不是判定垃圾桶已滿的最終 依據。當超聲波模塊測量到垃圾桶已滿時,還需啟動重力傳 感器模塊測量垃圾的重量。
1.1.2重力傳感器測重力
為了降低功耗,重力傳感器模塊只有在超聲波傳感器的檢測結果達到了閾值才會啟用。本研究使用微型重力傳感器, 放置在垃圾桶底部并由塑料外殼包裹。重力傳感器通過導線連接到MSP430 單片機的IO 口上,當需要采集垃圾桶內的垃圾重力數據時,MSP430 單片機才啟動這個模塊進行數據采集。若采集到垃圾的重量到達了閾值,則發送警告信息。若垃圾的重量未達到閾值,則過段時間再次采集垃圾桶內垃圾的重力數據。
1.2 NB-IoT 模塊
無線模塊使用的是移遠 BC95 NB-IoT 模組。BC95 是一款高性能、低功耗的 NB-IoT 無線通信模塊。其尺寸僅為23.6mm×19.9mm×2.2mm,較小的體積也使得我們的硬件模塊尺寸更小。NB-IoT 模塊在不發送數據時工作在省電模式,功耗極低。NB-IoT 模塊還具備海量連接的能力,NB-IoT 的一個扇區能夠支持 10 萬個連接,可以達到各種場合垃圾桶連接數量的要求。
1.3按鍵及可拓展接口設計
硬件模塊預留了接口以便實現一些拓展功能。在特定場所下,如在動物園中小朋友走丟就可以按下求救按鈕。MSP430 單片機檢測到按鈕的外部中斷后就會立刻通過 NB-IoT 模組將報警數據發送至云平臺,平臺可協助給與幫助。
除了擴展性,還有很強的適用性。在生產過程中,可以批 量生產硬件模塊,當系統硬件應用在特定場所時只需要修改 程序并添加相應的外設即可。
2 系統軟件模塊設計
主程序流程圖如圖 1 所示。
當硬件程序開始工作時,每間隔 30 分鐘進行一次超聲波測距,用來檢測垃圾桶內垃圾的高度是否超過閾值。當沒有采集任務時,MSP430 單片機工作在休眠狀態,處于低功耗模式。當傳感器檢測垃圾桶內的垃圾已滿時,MSP430 單片機就向NB-IoT 模塊發送AT 指令,NB-IoT 模塊再將數據發送至云平臺處理。
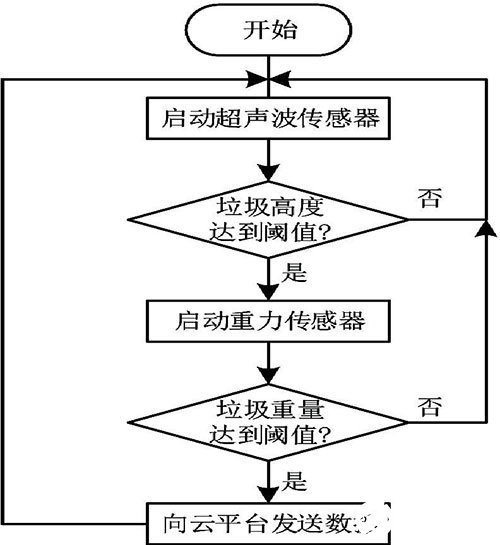
圖 1 主程序流程圖
垃圾桶內的垃圾是否已滿的判定規則為:在超聲波傳感器檢測到垃圾的高度超過閾值后,MSP430 單片機就會啟動重力傳感器測量垃圾的重量。如果垃圾桶內垃圾的重量未達到 閾值,則認為當前垃圾桶處于虛滿狀態,此時不向云平臺發送 已滿的警告消息。只有檢測到垃圾高度和垃圾質量都超過了 閾值才會向云平臺發送已滿報警數據。
-
msp430
+關注
關注
181文章
2405瀏覽量
230629 -
智能垃圾桶
+關注
關注
3文章
53瀏覽量
10801
發布評論請先 登錄
STM32項目分享:STM32智能語音分類垃圾桶

垃圾桶滿溢檢測器中溢滿程度監測方案
霍爾元件DH627/DH629在智能垃圾桶中的應用

XD08M3232紅外感應單片機在智能垃圾桶抗干擾性分析
XD08M3232接近感應單片機在智能垃圾桶抗干擾性分析
使用MSP430 MCU通過I2C實現低功耗Windows 8 HID應用

msp430單片機的優缺點介紹
利用超低功耗單片機 MSP430 作為系統伴隨芯片應用報告
FlexLua低代碼零基礎開發智能垃圾桶產品原型(接入機智云)





 工商網監
工商網監
評論