") 東芝已成功研發(fā)出具有3D識別功能的單目攝像頭人工智能技術(shù)
東芝已成功研發(fā)出具有3D識別功能的單目攝像頭人工智能技術(shù)
據(jù)麥姆斯咨詢報道,東芝已成功研發(fā)出具有3D識別功能的單目攝像頭人工智能(AI)技術(shù),測量距離的精度不輸立體攝像頭。東芝的方案采用市售單目攝像頭拍攝圖像,然后利用獨特設(shè)計的鏡頭造成圖像模糊,通過深度學(xué)習(xí)分析來實現(xiàn)。該技術(shù)降低了對立體攝像頭的需求,成本和尺寸都有所降低。
近年來,圖像傳感技術(shù)在眾多領(lǐng)域變得越來越重要:例如可抓取和移動物體的機器人、無人駕駛車輛、無人機基礎(chǔ)設(shè)施檢測等。諸如此類的應(yīng)用需要的不僅僅是拍攝物體的圖像,還需要有個小型設(shè)備來分析3D數(shù)據(jù),包括形狀和距離。因此,使用體積更易小型化的單目攝像頭測量技術(shù)受到了極大關(guān)注。目前的研究越來越集中于使用單目攝像頭,通過深度學(xué)習(xí)來改進測距技術(shù),更好地了解成像物體的形狀、背景和其它場景數(shù)據(jù)。
然而,該技術(shù)也存在缺點:單目攝像頭的測距精度取決于深度學(xué)習(xí)訓(xùn)練的場景數(shù)據(jù),因此對于不同場景中拍攝的圖像,測距精度會大大降低。為了消除對這些數(shù)據(jù)的依賴性,東芝開發(fā)了一種分色濾鏡(color-filtered aperture)拍攝技術(shù)。該技術(shù)通過在鏡頭上安裝兩個分色濾鏡,然后根據(jù)與被攝物體之間的距離來分析最終圖像模糊的顏色和大小。雖然這種方法解決了數(shù)據(jù)依賴性問題,但整改現(xiàn)有鏡頭需要花費大量時間和金錢(圖1)。
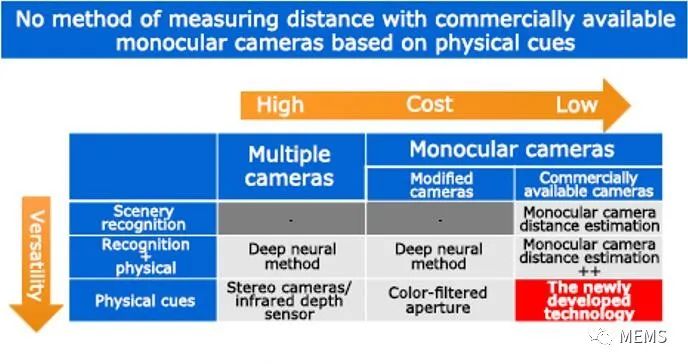
圖1 東芝開發(fā)的新技術(shù)在3D識別方案中的優(yōu)勢
東芝現(xiàn)已克服這一問題,他們開發(fā)的具有3D識別技術(shù)的人工智能,采用普通的單目攝像頭,無需場景數(shù)據(jù),僅利用深度學(xué)習(xí)來分析圖像模糊(模糊的形狀)如何根據(jù)其在鏡頭上的位置而變化,從而實現(xiàn)與立體攝像頭同樣高精度的距離測量(圖2)。
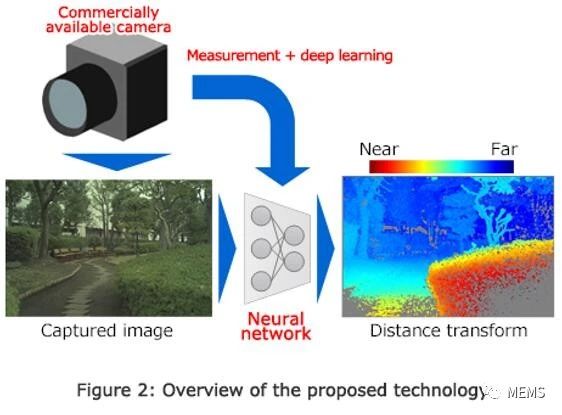
圖2 東芝研發(fā)出的具有3D識別功能的單目攝像頭方案
到目前為止,從理論上講,根據(jù)圖像模糊的形狀進行測距還是非常困難的,因為當(dāng)物體與焦點等距時,物體無論遠近都是一樣的(圖3)。然而分析結(jié)果表明,即使與焦點等距,近距物體和遠距物體的模糊形狀也存在很大差異(圖4)。在此基礎(chǔ)上,東芝成功地利用深度神經(jīng)網(wǎng)絡(luò)模型訓(xùn)練的深度學(xué)習(xí)模塊對采集到的圖像進行模糊數(shù)據(jù)分析。
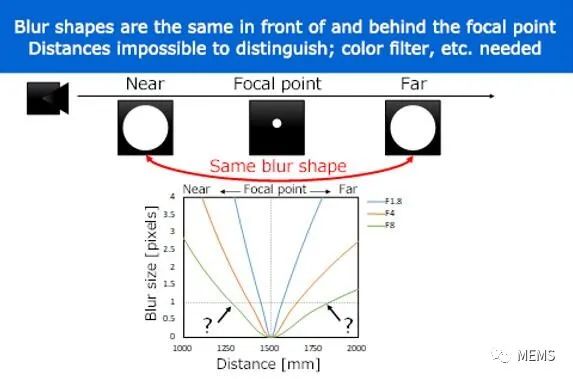
圖3 固定思維:物體與焦點等距時,無法通過模糊形狀測距
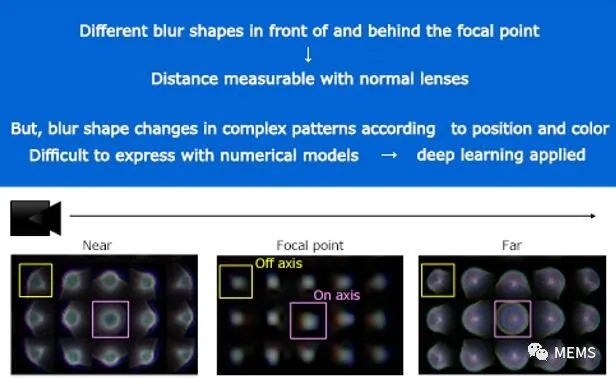
圖4 實驗證明:物體與焦點等距時,模糊形狀其實差異較大
當(dāng)光通過鏡頭時,所產(chǎn)生的模糊形狀會根據(jù)光的波長及其在鏡頭中的位置而改變。在東芝開發(fā)的網(wǎng)絡(luò)中,位置和顏色數(shù)據(jù)被分開處理,從而正確感知模糊形狀的變化,然后再通過對注意力機制(attention mechanism)進行加權(quán)后,用于控制亮度梯度上的焦點,以正確測量距離(圖5)。通過學(xué)習(xí),對網(wǎng)絡(luò)進行更新,以減少測量距離和實際距離之間的誤差。
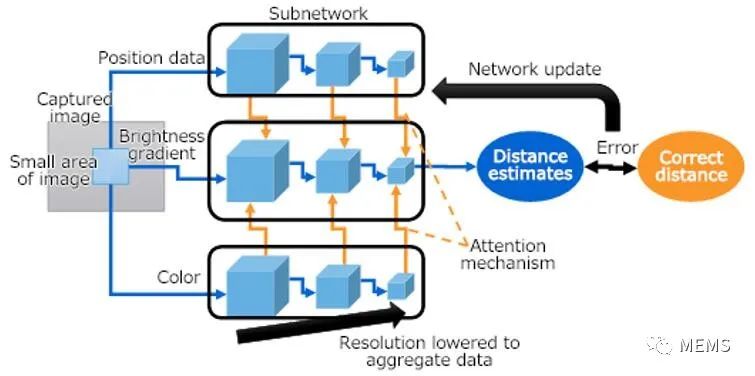
圖5 東芝開發(fā)的神經(jīng)網(wǎng)絡(luò),用于單目攝像頭的3D識別功能
東芝已證實,通過使用此AI模塊,用市面上可買到的單目攝像頭拍攝的單張圖像,可實現(xiàn)與立體攝像頭同樣的測距精度。
接下來,東芝將利用市面上的相機和鏡頭確認該系統(tǒng)的普適性,并加快圖像處理速度,以期在2020年正式售賣。”
-
3D
+關(guān)注
關(guān)注
9文章
2954瀏覽量
110103 -
攝像頭
+關(guān)注
關(guān)注
61文章
4959瀏覽量
97795 -
人工智能
+關(guān)注
關(guān)注
1804文章
48813瀏覽量
247233
原文標(biāo)題:東芝成功研發(fā)具有3D識別功能的單目攝像頭AI技術(shù)
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
開源項目 ! 利用邊緣計算打造便攜式視覺識別系統(tǒng)
客流統(tǒng)計自動識別攝像頭

AI智能識別監(jiān)測攝像機

邊坡智能監(jiān)測識別攝像頭

嵌入式和人工智能究竟是什么關(guān)系?
未來智慧建筑:人工智能技術(shù)的無限可能
AI for Science:人工智能驅(qū)動科學(xué)創(chuàng)新》第4章-AI與生命科學(xué)讀后感
《AI for Science:人工智能驅(qū)動科學(xué)創(chuàng)新》第一章人工智能驅(qū)動的科學(xué)創(chuàng)新學(xué)習(xí)心得
risc-v在人工智能圖像處理應(yīng)用前景分析
電動車亂停放識別攝像頭

名單公布!【書籍評測活動NO.44】AI for Science:人工智能驅(qū)動科學(xué)創(chuàng)新
越界智能監(jiān)測攝像機

使用myAGV、Jetson Nano主板和3D攝像頭,實現(xiàn)了RTAB-Map的三維建圖功能!





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論