 從網絡驅動到CAN驅動
從網絡驅動到CAN驅動

一年多來,搞嵌入式驅動開發項目做的不少:
從網絡驅動到CAN驅動、從Dataflash驅動到NAND/NOR FLASH驅動、從CF/IDE驅動到各種嵌入式文件系統、從LCD/VGA驅動到音頻驅動、從IAR到ADS再到GCC、Ucos到linux、從I2C總線到SPI再到SSC以及TCP/IP協議。
但感覺并沒有學到什么東西,就一個字:
累!
老實說這些項目,很少有驅動是自己動手寫的,基本都是找來相近的代碼改過來的。
有時候感覺自己現在做什么都是半桶水,對自己超沒信心了。
對linux也是一知半解,對啟動腳本,系統配制,shell、makefile以及應用程序編程,都了解一點點但沒有一樣精通的;工作主要使用C語言,可是有時候寫個測試程序也是一堆錯誤;英語自感覺還不錯,但是有時候看datasheet也會發懵!
生活艱難,工資又低,想提升自己卻又謎茫不已。
大牛建議:
1) 為了今后的發展,你除了考慮廣度以外,更重要的是注意知識的深度。
譬如,做過網絡驅動,那么是不是只停留在會寫驅動的表層上,有沒有對Linux內核的網絡結構,TCP/IP協議作過深入的了解。
2) 在Linux下開發很多時候都要利用現成的東西,沒必要什么都自己搞。關鍵是變成自己的驅動后是否了解原作者編寫時背后的一些東西。你應該不止是簡單的讓它工作。寫驅動的時候就要考慮它的性能問題,并給出測試的方法(當然可以利用現成的許多工具,譬如測試網絡性能的netperf等)。
當你寫過Flash驅動,可能會知道Flash的性能有時候有多重要。
3) C程序的自我修煉,是否考慮到軟件工程方面的一些東西,程序的可維護性和擴展性,譬如LCD驅動,是不是從Sharp到NEC的只需要集中修改很少的幾個地方?
對于不同品牌的Flash,如果使得Flash的驅動做的更具有靈活性。
4) 如果有時間結余,可以關注Linux內核的發展。譬如LCD的驅動有沒有考慮到V4L2通用架構,譬如網絡驅動用到了NAPI了嗎?當然在此之前,假設已經對LDD3, ULK2理解的比較熟了。
5) 現在所作的這些驅動還算不得非常核心的東西。如果你想有更好的發展,可以考慮往audio,video,net方面發展,你應該多注意真個行業需要什么樣的人才,上述每一項都需要很厚的底蘊,譬如video,需要了解MPEG4, H264等,怎么也要個1到2年才能算個入行阿,所以我建議不要只顧悶頭做東西,要適當關注目前的一些應用。
6) 對硬件知識的補給,做嵌入式Linux這一行不可能不讀硬件的Spec,如果你對硬件的工作機制理解的比較透,會有助你寫出性能好的驅動程序。
順便提一點,適時的提高你的英語水平,對你的職業生涯絕對有幫助。(不要等需要的時候再補,來不及)
7) 如果有時間,平時注意對Linux應用程序編寫的了解/積累,也將有助于你寫出很好功能很好的驅動程序。
8) 永遠不能以為自己做了很多東西,就驅動而言,像TVIN/TVOUT, USB, SDIO等等,好多未知領域呢。在問題還沒有解決之前很難說清是哪里不對了。
有時候是datasheet里面的一句話沒有注意,還有好幾次調不出來最后查到是PCB的問題,所以有時候特別暈。
此外,其實如這位網友做的這些東西,在不懂的人看來,好像很高深,不能逾越,但是任何東西都一樣,你要不斷的進步,第一次做某個驅動和第二次再做這個驅動,你應該獲得更多,如果你沒有這種感覺,那你就是白做了。
比如,你第一次寫Linux驅動和你第十次寫linux驅動,你應該有不同的感覺,更甚者,也許你有了一套很好的框架,無論任何驅動,你只要套用框架,然后針對不同的datasheet做點修改就可以了。
如果你能自己總結這些框架并把它分享給大家,那么你的價值又高了不少。
你在做驅動的時候,肯定會用到與內核相關的東西,或者需要和內核中的某些模塊配合,這樣你也要理解內核的某些部分是如何實現的,最后,你應該可以很好的掌握linux的內核整體框架是什么。
這些都是進步,都是在你一次又一次的開發中需要總結的東西,如果你不總結,永遠都是從頭開始(或者說永遠都是還沒看懂別人代碼為什么這么做的時候,就去改它,然后可以工作了),就完事了,這樣你永遠也不可能提高,最后你就有了現在的這種感覺,覺得自己什么都不是,什么都不懂。
還有一點要說明的,現在有許多人搞linux開發,卻不去用linux系統做為自己工作的平臺,在這種情況下,你很難理解linux內核的實現機制,以及為什么要采用這種方式實現。
你都沒用過linux系統,就想去實現一個與linux運行機理相符合的項目,這是不可能的。就是你這個項目成功了,它也肯定不是最優的,或者是不符合linux的使用習慣的(包括內核的擴展和應用程序的實現)。
所以,最后想說的是,你一定要定期總結,總結你這段時間做了什么,你從中得到了什么,為了你以后可以更好的做好類似的工作,你應該去看些其它的什么東西;二是你一定至少要在工作的開發環境中使用linux作為你的平時工作平臺,而不要使用虛擬機和服務期,因為你只有完全了解了linux的使用,你才可以為它開發符合它規則的項目。
-
嵌入式
+關注
關注
5150文章
19660瀏覽量
317406 -
Linux
+關注
關注
87文章
11509瀏覽量
213726 -
應用程序
+關注
關注
38文章
3334瀏覽量
59019
原文標題:搞嵌入式驅動開發一年多了,感觸頗多......
文章出處:【微信號:EngicoolArabic,微信公眾號:電子工程技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
從驅動到應用:RT-Thread環境下的SDIO開發指南
6軸步進電機驅動+STM32F767+485+CAN+網口+12輸入輸出原理圖
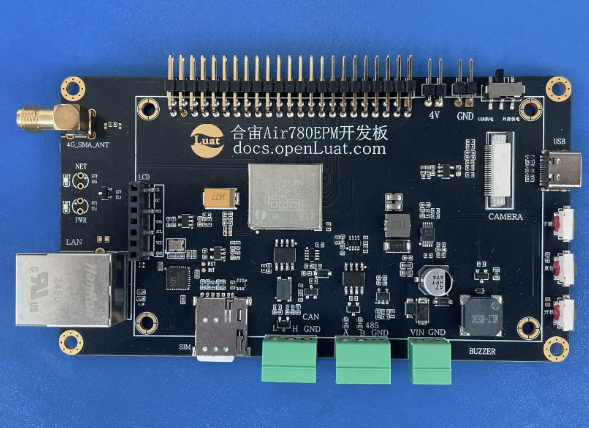
深度解析Air780EPM模組:LuatOS下CAN總線通信的完整方案!

使用Mickledore生成BSP,移動到最新版本的Scarthgap v6.6.52時,驅動程序未構建,怎么解決?
使用CAN以及CANIF配置了S32K310的CAN驅動模塊,如何進行報文的接收呢?
探索 CAN 轉 PN 網關連接 can 設備的精準配置之道

從驅動到空調、機器人應用,剖析格力的電機布局
EtherCAT從站轉CAN協議網關(CAN轉EtherCAT)

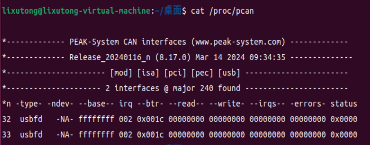
虹科技術 全新Linux環境PCAN驅動程序發布!CAN/CAN FD通信體驗全面升級!
【龍芯2K0300蜂鳥板試用】CAN接口驅動板設計、CANFD測試、CAN C++程序驅動測試
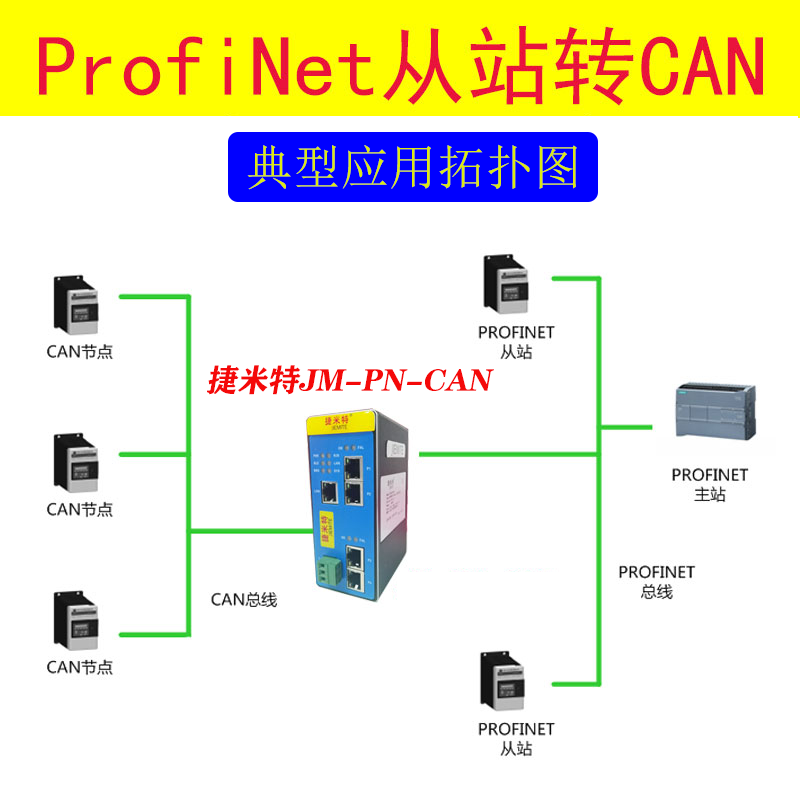
CAN主站轉Profinet從站協議網關(JM-PN-CAN)

EtherCAT從站轉CAN總線協議轉換網關(JM-ECT-CAN)
Profinet從站轉CAN協議轉換網關(JM-PN-CAN)





 工商網監
工商網監
評論