") 新型慣性傳感器模塊LSM6DSOX的應用案例及優(yōu)勢
新型慣性傳感器模塊LSM6DSOX的應用案例及優(yōu)勢
在過去的十年中,物聯(lián)網(wǎng)應用規(guī)模呈指數(shù)增長。大多數(shù)物聯(lián)網(wǎng)應用都涉及在可能沒有電源的位置測量物理數(shù)值。 增裝電源線通常是行不通的,因此,電池是首選供電方案,并且無線數(shù)據(jù)傳輸是必選。物聯(lián)網(wǎng)相關(guān)應用至少需要一個傳感器獲取數(shù)據(jù)和一個傳輸媒介發(fā)送數(shù)據(jù)。電源需要給數(shù)據(jù)傳輸媒介和傳感器供電。在設計這種類應用時,需要在這個方面做出權(quán)衡和取舍:是最大限度延長電池續(xù)航時間還是提高數(shù)據(jù)傳輸頻率?
應用設計者可用一個在市場上有售的重要工具來解決這個折衷難題。這個工具是一個精密的計算單元,可以執(zhí)行參數(shù)測量和數(shù)據(jù)傳輸任務,效果和能效都很好,這樣的計算單元通常是針對低功耗設計的通用微控制器。對于低功耗應用,無線數(shù)據(jù)傳輸比其它處理任務更重要,因此,物聯(lián)網(wǎng)應用設計策略是,如果其它處理任務允許降低通信速度,則可以將計算單元轉(zhuǎn)移到物聯(lián)網(wǎng)端。
本文旨在于介紹創(chuàng)新傳感器在降低產(chǎn)品功耗方面取得的新進展。意法半導體的新型慣性模塊LSM6DSOX允許將算法處理過程全部或部分移至傳感器的定制低功耗環(huán)境。這種方法具有廣泛的可配置性,保證廣泛的應用范圍。本文結(jié)構(gòu)如下:第一章介紹一個創(chuàng)新的嵌入式算法,并結(jié)合應用案例說明其優(yōu)勢。然后用兩個章節(jié)專門介紹機器學習處理。最后一章介紹一個好用的定制支持軟件,用戶可以根據(jù)需求快速配置軟件,創(chuàng)建新應用。
嵌入式算法方案
如前一章所述,簡單的物聯(lián)網(wǎng)應用模型包括發(fā)射器/接收器、計算單元、執(zhí)行器或傳感器和電池。
以智能手環(huán)為例,智能手環(huán)能夠識別用戶活動,并輸出相關(guān)活動數(shù)據(jù):用戶步行多遠,乘車多長時間等。當然,智能手環(huán)應具有翻腕顯示日期和時間的功能。藍牙低功耗系統(tǒng)芯片是執(zhí)行傳輸和控制的關(guān)鍵組件。該解決方案嵌入了完整的藍牙網(wǎng)絡處理器和運行應用程序的應用處理器。應用處理器包括低功耗微控制器、用戶程序NVM存儲器,數(shù)據(jù)存儲器、編程存儲器(NVM鏡像)以及通信接口(SPI,I2C等)。從下面給出的系統(tǒng)示例可以大致估算出該解決方案的功率預算。這款內(nèi)置微控制器的“智能”藍牙模塊通常具有不同的功耗模式,下面列出了最常見的模式:
睡眠模式:此模式用于關(guān)閉大多數(shù)內(nèi)部模塊或使其處于低功耗狀態(tài),最大程度地降低功耗。從此模式返回到正常工作模式需要一些時間(0.5-2 ms)。該模式電流消耗在0.5-2 μA之間。
微控制器工作模式:射頻發(fā)射器/接收器關(guān)閉,微控制器正常工作。 此模式的電流消耗在1-3 mA之間。
射頻收發(fā)模式:設備處于通信連接狀態(tài),功耗為3-20 mA。
我們討論一下智能手環(huán)檢測用戶活動的用例。假設智能藍牙模塊中的微控制器通過I2C/SPI接口連接慣性模塊,傳感器數(shù)據(jù)輸出數(shù)據(jù)速率配置為25Hz。每當嵌入式16 MHz時鐘域生成樣本時,微控制器就會退出睡眠模式,讀取傳感器數(shù)據(jù)并執(zhí)行活動識別算法。高質(zhì)量的活動識別算法用例平均需要4 ms的處理時間。藍牙傳輸是間歇性的,取決于用戶要求(一天一次)。
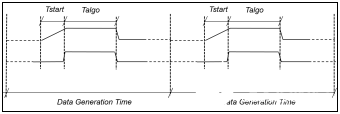
圖1:微控制器從睡眠到喚醒的時序
圖1顯示了微控制器運行算法時的占空比時序。Tstart是微控制器的喚醒時間,Talgo是算法的執(zhí)行時間,Todr是傳感器兩次讀取操作的間隔。
下面是總平均電流ITOT的基本計算公式,其中包含各種主要電流消耗參數(shù):
ITOT = IBUS + ISLEEP + falgo * IUCORE * ( Tstart/2 + Talgo )
IBUS 是接口總線讀取操作消耗的電流;SPI總線的讀取電流應小于1 μA,I2C總線約在2-5 μA之間。射頻是間歇性傳輸,所以功耗可以忽略不計。考慮到每個參數(shù)取值取其聲明范圍的中間值,最后得到的ITOT為230 μA。
嵌入式算法是經(jīng)過重新配置的可以實現(xiàn)“活動識別”,工作電流小于8 μA。這里所說的嵌入式算法與在微控制器上運行的算法在性能和質(zhì)量上完全相同。嵌入式解決方案的顯著優(yōu)勢是在傳感器內(nèi)部生成可用數(shù)據(jù),因此不存在IBUS功耗。此外,嵌入式解決方案完全沒有微控制器安全退出睡眠狀態(tài)所需的Tstart時間,當Tstart和IBUS兩項參數(shù)均為零時,ITOT估算值是200 μA,這意味著,使用相同公式falgo*IUCORE*Talgo計算,算法從微控制器遷移到傳感器使功耗降至二十五分之一。
因為意法半導體軟件庫和客戶需求是已知的,并且是合并在一起的,所以,我們的策略是收集最常見的用例,然后將其分為兩類。第一類是由非常適合使用有限狀態(tài)機的算法組成,第二類基于需要統(tǒng)計分析(基于模式分析)并且可以通過決策網(wǎng)(樹)有效實現(xiàn)的應用。針對這兩大類應用,我們開發(fā)出一個覆蓋現(xiàn)有算法的“元命令”集,并確保算法具有廣泛的可重新配置性,以處理新的自定義需求。最后一步是算法分析,目的是找到最佳的低功耗且有效的算法定制邏輯。在不影響算法性能的情況下,按照特定應用需求簡化算法。下面的兩個章節(jié)介紹這兩個模塊和元數(shù)據(jù)。
機器學處理(MLP)
有限狀態(tài)機是利用本身固有的演繹推理特性:從假設開始,檢驗達到特定邏輯狀態(tài)的概率。對于運動檢測算法,演繹推理是確定一系列事件是否滿足“規(guī)則”。這種方法適用于大多數(shù)手勢檢測算法,當然,不能全部適用。例如,手機舉起到放下的手勢算法可以完全基于以下事實:手機加速度計檢測到的重力主要是在同一個軸上,并在一個時間序列后,檢測到的重力方向?qū)兂上喾捶较颉P薷囊恍﹨?shù)就可以更改手勢定義,這些參數(shù)包括軸定義、閾值和序列持續(xù)時間。步行檢測等運動算法幾乎不可能通過簡單的狀態(tài)機來定義,因為變量數(shù)量會急劇增加,傳感器定位、頻率、地形和個人行為導致感應信號變化很大。從上一個示例中,可以得出一個更具一般性的概念:雖然手機舉起到放下的手勢統(tǒng)計方差在一個人群中是較明顯的,但是可以進行演繹推理應用設計;而步行動作會引起廣泛的統(tǒng)計方差,演繹推理方法應該棄用,而采用歸納推理方法。
機器學習處理的基本原理是允許在芯片上執(zhí)行數(shù)據(jù)驅(qū)動型算法,開發(fā)從輸入模式構(gòu)建模型的能力。在過去的十年中,互聯(lián)網(wǎng)和物聯(lián)網(wǎng)爆炸式增長,大量信息產(chǎn)生。 隨著數(shù)據(jù)量急劇增加,數(shù)據(jù)管理工具也被開發(fā)出來,使數(shù)據(jù)開始有應用價值。MLP解決方案被認為是適合在慣性傳感器上執(zhí)行數(shù)據(jù)驅(qū)動算法。MLP具有很高的可重新配置性,在慣性傳感器領域達到了預期效果,可以在超低功耗環(huán)境執(zhí)行算法,適用于耗電量大的產(chǎn)品,例如,物聯(lián)網(wǎng)算法。
數(shù)據(jù)挖掘是機器學習的一個重要分支:“數(shù)據(jù)挖掘是一個綜合機器學習、模式識別和統(tǒng)計學的跨學科領域,其目的是發(fā)現(xiàn)知識。
數(shù)據(jù)挖掘工具最后生成一個決策樹,應用設計是從一個數(shù)據(jù)模式集合開始,以在MLP內(nèi)核上加載決策樹結(jié)束。用戶可以用支持軟件管理整個應用設計過程,我們將在下一章介紹支持軟件,本章介紹MLP內(nèi)核背后的基本模塊。
圖4是機器學習處理內(nèi)核的整體結(jié)構(gòu)圖。
圖4:MLP內(nèi)核整體結(jié)構(gòu)圖
從圖中不難看出軟件層和硬件層之間的邊界。該應用設計從傳感器數(shù)據(jù)模式開始,模式是描述MLP內(nèi)核在運行時必須理解的知識。以活動識別算法為例,MLP從涉及要識別的活動(步行,跑步,運動的車輛,無運動等)的模式開始運行,目的是直接從傳感器數(shù)據(jù)推出當前活動的結(jié)果。最多可以將3個傳感器的數(shù)據(jù)配置為算法輸入。陀螺儀和加速度計模塊位于傳感器內(nèi)部,外部傳感器(例如磁力計)的數(shù)據(jù)可以通過嵌入式I2C控制器讀取。輸入傳感器數(shù)據(jù)由物理傳感器的軸和數(shù)值組成(表VI。)。
表I. MLP的輸入類型

要想調(diào)理輸入數(shù)據(jù),還有多個可配置濾波器可用,如下表所示(表VII)。
表II. 內(nèi)核中的濾波器類型

原始數(shù)據(jù)和過濾數(shù)據(jù)都可以設為特征模塊的輸入,特征模塊執(zhí)行數(shù)據(jù)的統(tǒng)計計算,輸出可以配置成多達19個不同的統(tǒng)計特征。表VIII中列出了可用特征。主要特征集分為觸發(fā)式和窗口式兩類,前者是按照特征事件計算的結(jié)果,后者是按照固定時窗間隔統(tǒng)計的結(jié)果。盡管所有特征計算結(jié)果可以是窗口式或觸發(fā)式特征集,取決于用戶配置,但只有這些特征的子集才可以生成觸發(fā)信號。
表III:MLP內(nèi)核的統(tǒng)計特征
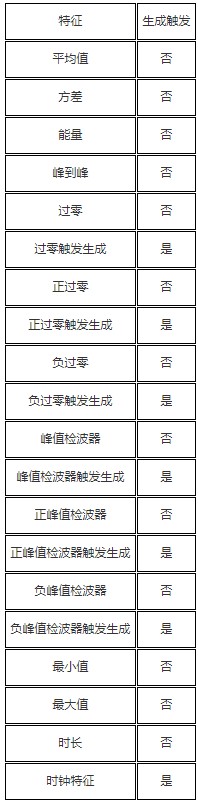
時鐘特征是
在特征配置結(jié)束時,軟件工具(下一章介紹)輸出一個配置文件和一個ARFF文件。配置文件安裝在慣性單元上用于配置MLP,ARFF文件用于數(shù)據(jù)挖掘工具,是與MLP處理器芯片匹配的。數(shù)據(jù)挖掘工具組建ARFF文件,針對特定應用案例優(yōu)化(或“確定”)選擇最佳的特征集,并輸出決策樹及相關(guān)統(tǒng)計性能。
在數(shù)據(jù)挖掘工具處理和反饋后,可以重新處理數(shù)據(jù)并優(yōu)化特征集。
當統(tǒng)計性能符合期望時,可以通過意法半導體軟件工具生成的配置文件將決策樹加載到MLP內(nèi)核上。
支持軟件
意法半導體開發(fā)出一個使基于統(tǒng)計學/機器學習的方法適合編程的工具,有了這個工具,設備配置過程變得輕松快捷。
這個機器學習處理配置工具是一個擴展版的Unico GUI圖形用戶界面軟件(意法半導體所有MEMS傳感器演示板通用)。Unico軟件連接基于STM32微控制器的主板,實現(xiàn)MEMS傳感器與PC GUI之間的通信。該軟件以圖形和數(shù)字形式顯示傳感器輸出,并允許用戶保存或全面管理來自設備的數(shù)據(jù)。
Unico軟件允許訪問MEMS傳感器寄存器,可以快速配置寄存器,并可以直接在設備上輕松測試配置。可以將當前寄存器的配置保存為文本文件,并可以從現(xiàn)有文件中加載配置。這樣,可以在幾秒鐘內(nèi)重新設置傳感器。
基于統(tǒng)計/機器學習的算法要求收集數(shù)據(jù)日志。使用Unico GUI可以做到這一點。每個數(shù)據(jù)日志都必須關(guān)聯(lián)預期結(jié)果(例如,靜止,步行,跑步等)。該工具收集這些數(shù)據(jù)模式用于計算某些特征。
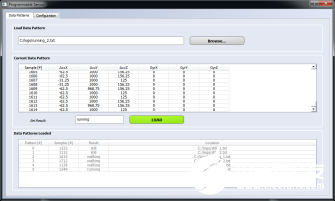
圖8:數(shù)據(jù)模式表
該工具可為原始數(shù)據(jù)選擇濾波器,選擇用過濾數(shù)據(jù)計算哪些特征,計算結(jié)果特征將是決策樹的屬性。幾個步驟后,該工具將生成一個屬性關(guān)系文件(ARFF)。
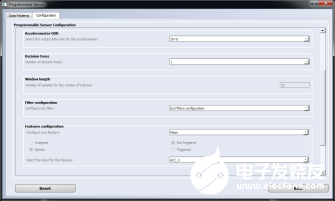
圖9:配置表
ARFF文件是決策樹生成過程的入口。決策樹可以由不同的機器學習工具生成。 懷卡托大學開發(fā)的軟件Weka能夠從屬性關(guān)系文件開始生成決策樹。Weka工具可以評估哪些屬性適合決策樹。通過更改Weka中所有可用參數(shù),可以實現(xiàn)不同的決策樹配置。
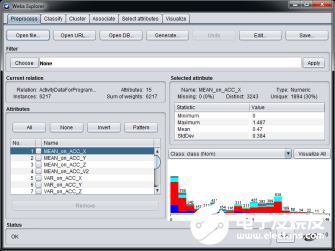
圖10:在Weka里的屬性視圖
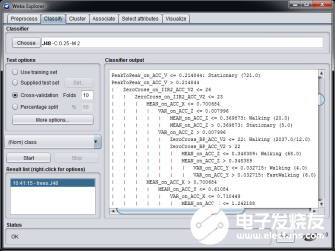
圖6:Weka中的決策樹生成
在決策樹生成后,可以將其上傳到意法半導體的軟件工具,完成MEMS傳感器的寄存器配置。
通過訪問傳感器寄存器,Unico GUI可以讀取決策樹輸出狀態(tài)。
應用案例
從第二部分介紹的示例開始,我們做了一些電流消耗測量,選擇了一個活動識別算法作為示例。該算法的性能在模式數(shù)據(jù)庫中經(jīng)過明確評估,而且在普通通用微控制器上運行時電流消耗約為數(shù)百微安。利用上一章介紹的支持軟件,可以輕松地配置MLP內(nèi)核,運行該活動識別算法。
表IV:電流要求

表IX 總結(jié)了在Cortex-M3 上運行活動識別算法的電流要求,以及在LSM6DSOx MLP上運行同一算法增加的電流需求。
結(jié)論
世界網(wǎng)絡化程度越來越高:聯(lián)網(wǎng)設備可以交換大量數(shù)據(jù)。物聯(lián)網(wǎng)應用依賴于三個關(guān)鍵模塊:感知、智能和通信。本文介紹了一種高度可配置的嵌入在慣性傳感器中的數(shù)字模塊。數(shù)字模塊為傳感器增加了智能,可以大幅降低系統(tǒng)級能耗。為了快速開發(fā)應用原型,隨硬件一起提供了數(shù)字模塊配置支持軟件。上一章的應用案例清楚地表明,數(shù)字模塊可大幅降低電流消耗。智能傳感器是賦能電池續(xù)航能力至關(guān)重要的新應用的關(guān)鍵技術(shù)。
責任編輯:gt
-
電源
+關(guān)注
關(guān)注
185文章
18262瀏覽量
254936 -
傳感器
+關(guān)注
關(guān)注
2562文章
52524瀏覽量
763503 -
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2927文章
45847瀏覽量
387727
發(fā)布評論請先 登錄
怎樣去設計一種基于LSM6DSOX運動傳感器的機器學習電路?
lsm6dsox的ODR是否有可接受的偏差標準?
怎樣使用LSM6DSOX低級驅(qū)動程序讀取傳感器數(shù)據(jù)呢
lsm6dsox從機使用SPI通信可以嗎
請問在哪可以找到LSM6DSO32和LSM6DSOX的驅(qū)動程序呢
如何使用LSM6DSOX進行傾斜檢測?
lsm6dsox如何以輪詢方式讀取數(shù)據(jù)?
如何輕松進行lsm6dso和lsm6dsox軟件檢測?
LSM6DSOX嵌入式有限狀態(tài)機的使用和配置的信息
LSM6DSOX FSM手勢識別基礎示例
LSM6DSOX嵌入式有限狀態(tài)機的使用和配置的信息
LSM6DSOX嵌入式有限狀態(tài)機的使用和配置

基于LSM6DSOX的FSM狀態(tài)機的腕部動作識別
LSM6DSOX MLC狀態(tài)識別





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論