 石頭掃地機器人T6用起來到底怎么樣
石頭掃地機器人T6用起來到底怎么樣

——前言
隨著掃地機器人的購入門檻不斷降低、大量普及,人們對于掃地機器人這一智能家居新成員逐漸熟識之后也提出了更多要求和期望,就比方說清掃區域的自定義。
相信不少家庭現在還在用傳統的隨機碰撞掃地機器人,常常難以規避其在清掃過程中隨意闖入臥室、衛生間,甚至轉上幾圈之后帶回來一堆不該清掃的東西。畢竟掃地機器人沒有長人眼,在不加限制的情況下,一刀切地把該清理的和不該清理的通通碰一遍是無法規避的。
針對這一問題,石頭掃地機器人早在2018年便在當時的主力產品上升級加持了“禁區”與“軟件虛擬墻”功能,在當時用戶便可通過米家APP設定設備清掃禁區,再也不怕掃地機器人隨處亂逛。
到了今年,接過主力擔當的石頭掃地機器人T6發布即原生支持“禁區”與“軟件虛擬墻”功能,接下來就一同來看兩項功能的效果如何。
——“禁區”實測
石頭掃地機器人T6集合了LDS激光雷達及SLAM算法,能夠以高頻率進行智能測距,設備將通過激光雷達信息分析距離完成精準測距,并通過測得地圖智能規劃設備清掃路線。
在LDS激光雷達的基礎上,石頭掃地機器人T6還配備紅外碰撞保護傳感器和防跌落傳感器,在清掃過程中判斷清掃前方障礙物距離及清掃目標高度空間,并以此智能規劃如何清掃或避開,也為禁區功能的正常運行提供了前提保障。
如圖,使用者可以通過米家APP該界面調整石頭掃地機器人T6清掃禁區的范圍,在手機端APP主界面可以清楚地看到設備剩余電量、清掃面積及清掃時間,我們來手動點擊、拖動,即可手動圈畫房間清掃禁區。
根據我們在App上所看到的實時顯示清掃路徑,可以看到石頭機器人的T6行進路線變化,行走完一段路程之后遭遇禁區的“圍墻”便掉頭撤退。改變了以往傳統掃地機器人特別是隨機碰撞式需要通過設置外置實體虛擬墻或磁條來設定禁掃區的狀況。
——“虛擬墻”實測
我們所看到的的地圖是由石頭掃地機器人T6利用LDS激光測距傳感器快速掃描房間獲取距離信息,然后再通過SLAM算法,實時構建而成。其對室內各種物品的準確定位來規劃清掃路徑,免去四處碰撞的麻煩,也是軟件虛擬墻正常運行的基礎。
如上圖所示,筆者在掃地機器人所掃描生成的地圖上隨手勾勒了一道虛擬墻,然后我們將石頭掃地機器人T6放入其中開動清理。
由以上動圖,可以看到掃地機器人在遭遇虛擬禁區的“空氣墻”之后掉頭就走,與使用物理虛擬墻的效果完全相同,不會突破空氣中的這道無形虛擬墻半步。
——總結
由筆者通過對石頭掃地機器人T6的親身體驗可見,其自發布便原生搭載的“禁區”功能、“軟件虛擬墻”功能確確實實與實體墻所具備的功能相同,能夠帶來幾乎一致的體驗,為我們的日常使用帶來了極大便利,從此只需一鍵便可讓機器人繞行,再不需多掏銀子、多花力氣。
責任編輯:wv
-
掃地機器人
+關注
關注
21文章
819瀏覽量
54645
發布評論請先 登錄
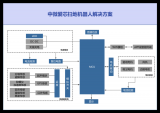
中微半導掃地機器人解決方案介紹

鈞敏科技AM2355驅動芯片在掃地機器人中的應用
艾為電子助力石頭科技推出兩款掃地機器人產品

高端掃地機器人市場銷額第一!追覓再創行業新標桿
石頭G30 Space探索版:掃地機器人新紀元
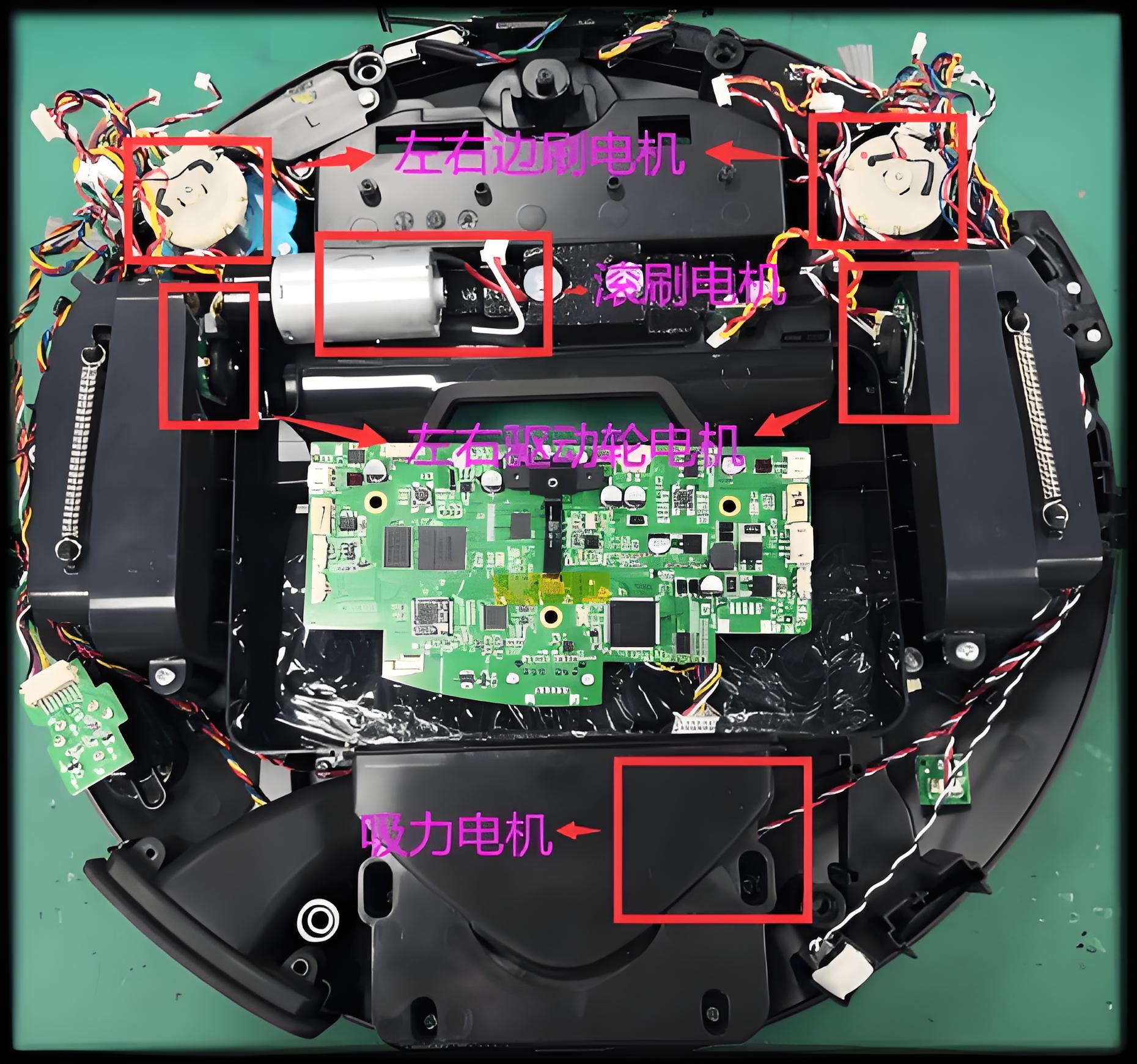
智能掃地機器人的工作原理和構成
霍爾元件在掃地機器人中的應用
掃地機器人應用解決方案





 工商網監
工商網監
評論