") 步進(jìn)電機(jī)的相關(guān)說明
步進(jìn)電機(jī)的相關(guān)說明

什么是步進(jìn)電機(jī)?
步進(jìn)電機(jī)是離散運(yùn)動(dòng)的直流電機(jī)。它們具有多個(gè)線圈,這些線圈以稱為“相”的組進(jìn)行組織。通過依次給每個(gè)相通電,電動(dòng)機(jī)將一次旋轉(zhuǎn)一個(gè)步。
通過計(jì)算機(jī)控制的步進(jìn),您可以實(shí)現(xiàn)非常精確的定位和/或速度控制。因此,步進(jìn)電機(jī)是許多精密運(yùn)動(dòng)控制應(yīng)用的首選電機(jī)。
步進(jìn)電機(jī)有許多不同的尺寸,樣式和電氣特性。本指南詳細(xì)介紹了您需要了解適合該工作的電動(dòng)機(jī)的內(nèi)容。
四相單極電動(dòng)機(jī)。 來自Wikimedia Commons的動(dòng)畫
步進(jìn)電機(jī)有哪些優(yōu)點(diǎn)?
定位 –由于步進(jìn)器以精確的可重復(fù)步長移動(dòng),因此它們在要求精確定位的應(yīng)用(例如3D打印機(jī),CNC,Camera平臺(tái)和X)中表現(xiàn)出色,Y繪圖儀。某些磁盤驅(qū)動(dòng)器還使用步進(jìn)電機(jī)來定位讀/寫頭。
速度控制 –精確的運(yùn)動(dòng)增量還可以實(shí)現(xiàn)出色的轉(zhuǎn)速控制,從而實(shí)現(xiàn)過程自動(dòng)化
低速扭矩-普通的直流電動(dòng)機(jī)在低速時(shí)扭矩不大。步進(jìn)電機(jī)在低速時(shí)具有最大扭矩,因此對(duì)于需要高精度的低速應(yīng)用是一個(gè)不錯(cuò)的選擇。
它們的局限性是什么?
低效率 –與直流電動(dòng)機(jī)不同,步進(jìn)電動(dòng)機(jī)的電流消耗與負(fù)載無關(guān)。當(dāng)他們根本不工作時(shí),請汲取最新信息。因此,它們傾向于運(yùn)轉(zhuǎn)。
有限的高速轉(zhuǎn)矩-通常,步進(jìn)電動(dòng)機(jī)在高速下的轉(zhuǎn)矩要比在低速下小。一些步進(jìn)器經(jīng)過了優(yōu)化,以實(shí)現(xiàn)更好的高速性能,但需要將其與合適的驅(qū)動(dòng)器配對(duì)才能實(shí)現(xiàn)該性能。
無反饋 –與伺服電機(jī)不同,大多數(shù)步進(jìn)機(jī)都沒有積分反饋的位置。盡管在“開環(huán)”運(yùn)行中可以達(dá)到很高的精度。為了安全和/或建立參考位置,通常需要限位開關(guān)或“家用”探測器。
步進(jìn)電機(jī)的類型
步進(jìn)電機(jī)的種類繁多,其中一些需要非常專業(yè)的驅(qū)動(dòng)程序。出于我們的目的,我們將重點(diǎn)介紹可以用普通電機(jī)驅(qū)動(dòng)的步進(jìn)電機(jī)。可用的驅(qū)動(dòng)器。它們是:永磁或混合式步進(jìn)電機(jī),兩相雙極或四相單極。
電動(dòng)機(jī)尺寸,首先要考慮的事情是電動(dòng)機(jī)必須完成的工作。如您所料,大型電機(jī)能夠提供更大的功率。步進(jìn)電機(jī)的尺寸范圍從小于花生到大型NEMA 57怪物。
大多數(shù)電動(dòng)機(jī)具有額定扭矩。這是確定電動(dòng)機(jī)是否具有滿足您所需功能的強(qiáng)度時(shí)需要考慮的內(nèi)容。
NEMA 17是3D打印機(jī)和小型CNC銑床中常用的尺寸。小型電機(jī)可用于許多機(jī)器人和動(dòng)畫應(yīng)用。較大的NEMA機(jī)架在CNC機(jī)械和工業(yè)應(yīng)用中很常見。
NEMA編號(hào)定義了用于安裝電機(jī)的標(biāo)準(zhǔn)面板尺寸。它們沒有定義電動(dòng)機(jī)的其他特性。兩種不同的NEMA 17電動(dòng)機(jī)可能具有完全不同的電氣或機(jī)械規(guī)格,并且不一定可以互換。
步數(shù)接下來要考慮的是您所需的定位分辨率。每轉(zhuǎn)的步數(shù)范圍為4到400。通常可用的步數(shù)為24、48和200。分辨率通常表示為每步度數(shù)。 1.8 °電動(dòng)機(jī)與200步/轉(zhuǎn)電動(dòng)機(jī)相同。
要獲得高分辨率,就要權(quán)衡速度和轉(zhuǎn)矩。高步數(shù)電機(jī)以比類似尺寸更低的RPM達(dá)到最高輸出。與以類似速度運(yùn)行的類似尺寸低步數(shù)電動(dòng)機(jī)相比,旋轉(zhuǎn)這些電動(dòng)機(jī)所需的更高步數(shù)導(dǎo)致較低的扭矩。
齒輪實(shí)現(xiàn)高定位分辨率的另一種方法是齒輪傳動(dòng)。將32:1齒輪系應(yīng)用于8步/轉(zhuǎn)電動(dòng)機(jī)的輸出將產(chǎn)生512步電動(dòng)機(jī)。
齒輪系也會(huì)增加電動(dòng)機(jī)的扭矩。一些微小的齒輪式步進(jìn)器能夠產(chǎn)生驚人的扭矩。但是,當(dāng)然要權(quán)衡速度。齒輪步進(jìn)電機(jī)通常僅限于低RPM應(yīng)用。
軸樣式的另一件事是電機(jī)如何將與驅(qū)動(dòng)器系統(tǒng)的其余部分連接。電機(jī)有多種軸類型:
圓軸或“ D”軸:這些軸具有各種標(biāo)準(zhǔn)直徑,并且有許多皮帶輪,齒輪和專門設(shè)計(jì)的軸連接器。 “ D”軸的一側(cè)扁平,有助于防止打滑。當(dāng)涉及到高扭矩時(shí),這些是理想的。
齒輪軸:有些軸的齒輪齒正好銑入其中。這些通常設(shè)計(jì)為與模塊化齒輪系配合。
導(dǎo)螺桿軸:帶導(dǎo)螺桿的電機(jī)用于構(gòu)建線性致動(dòng)器。這些的微型版本可以在許多磁盤驅(qū)動(dòng)器中找到磁頭定位器。
接線步進(jìn)電機(jī)接線有很多變化。就我們的目的而言,我們將重點(diǎn)介紹可以由常用驅(qū)動(dòng)器驅(qū)動(dòng)的步進(jìn)器。這些是連接為2相雙極或4相單極的永磁體或混合式步進(jìn)電機(jī)。
線圈和相位步進(jìn)電機(jī)可以具有任意數(shù)量的線圈。但是,這些連接成組稱為“階段”。相中的所有線圈都一起通電。
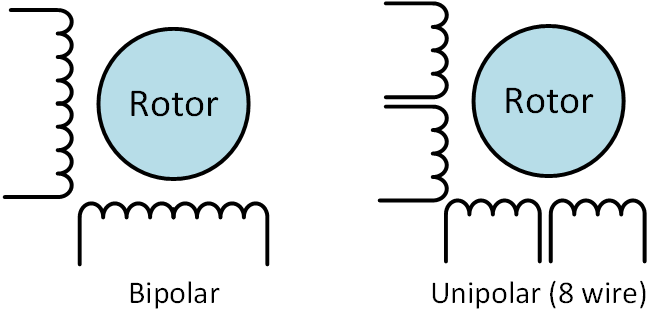
單極與雙極 單極驅(qū)動(dòng)器,始終以相同的方式激勵(lì)相位。一個(gè)線索,即“常見”線索,將永遠(yuǎn)是負(fù)面的。另一個(gè)線索將永遠(yuǎn)是積極的。單極驅(qū)動(dòng)器可以用簡單的晶體管電路實(shí)現(xiàn)。缺點(diǎn)是可用扭矩較小,因?yàn)橐淮沃荒芙o一半線圈通電。
雙極驅(qū)動(dòng)器使用H橋電路實(shí)際上使流過各相的電流反向。通過以交替的極性為相供電,可以使所有線圈運(yùn)轉(zhuǎn)以使電動(dòng)機(jī)旋轉(zhuǎn)。兩相雙極電動(dòng)機(jī)具有兩組線圈。 4相單極電動(dòng)機(jī)有4個(gè)。2相雙極電動(dòng)機(jī)將有4根線-每相2條。有些電動(dòng)機(jī)帶有靈活的接線,可讓您以雙極性或單極性運(yùn)行電動(dòng)機(jī)。
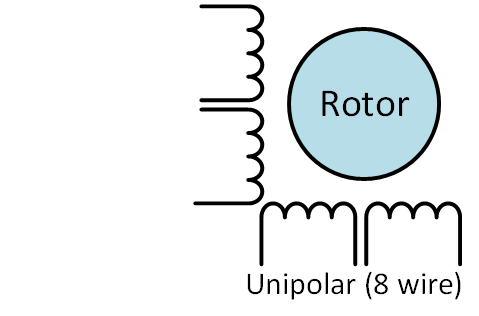
8線電機(jī) 8線單極是所有功能中最通用的電機(jī)。它可以通過幾種方式進(jìn)行驅(qū)動(dòng):
4相單極-所有公共線都連接在一起-就像5線電機(jī)一樣。
2相串聯(lián)雙極-相串聯(lián)連接,就像6線制電動(dòng)機(jī)。
2相并聯(lián)雙極性-相并聯(lián)連接。這樣可產(chǎn)生一半的電阻和電感-但需要兩倍的電流來驅(qū)動(dòng)。這種接線的優(yōu)點(diǎn)是更高的扭矩和最高轉(zhuǎn)速。
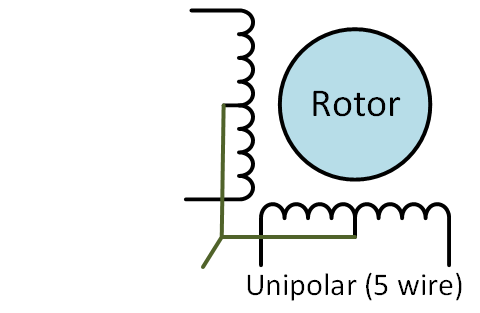
5-Wire電動(dòng)機(jī)
這種樣式在較小的單極電動(dòng)機(jī)中很常見。所有常見的線圈線在內(nèi)部都綁在一起,并作為第五根線引出。該電動(dòng)機(jī)只能作為單極電動(dòng)機(jī)來驅(qū)動(dòng)。
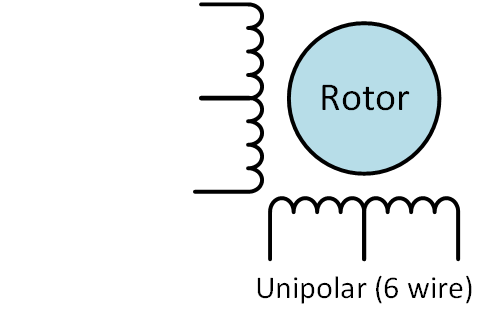
6-Wire電動(dòng)機(jī)。該電動(dòng)機(jī)僅連接2對(duì)配對(duì)的公共線。可以將這兩條線連接起來以創(chuàng)建5線單極電機(jī)。
或者您也可以忽略它們,將其視為雙極電機(jī)!
駕駛踏步車
按時(shí)間步入,按時(shí)間步入
快點(diǎn),物料,按時(shí)間步入
適時(shí)
適時(shí),適時(shí)
適時(shí),適時(shí)
從不需要理由,從沒有韻律
我們踏入時(shí)空,我們踏入時(shí)空
“踏入時(shí)空”
Robert B. Sherman and Richard謝爾曼(M.Sherman)
驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)比驅(qū)動(dòng)常規(guī)有刷直流電動(dòng)機(jī)要復(fù)雜一些。步進(jìn)電動(dòng)機(jī)需要一個(gè)步進(jìn)控制器來及時(shí)激勵(lì)各相,以使電動(dòng)機(jī)旋轉(zhuǎn)。
簡單的單極性驅(qū)動(dòng)程序最簡單的驅(qū)動(dòng)器類型可以由少數(shù)晶體管構(gòu)成。只需按順序打開和關(guān)閉這些電源即可為各相通電并步進(jìn)電動(dòng)機(jī)。單極驅(qū)動(dòng)器的制造成本相對(duì)較低,但僅適用于單極電機(jī)。在Arduino站點(diǎn)上有一個(gè)很棒的教程。
簡單的雙H橋驅(qū)動(dòng)器驅(qū)動(dòng)雙極型電動(dòng)機(jī)需要2個(gè)完整的H橋,以便可以將電流反向轉(zhuǎn)換為相位。從頭開始構(gòu)建H橋可能很棘手。但是,有很多H橋芯片可以簡化任務(wù)。
L293D是最受歡迎和最經(jīng)濟(jì)的芯片之一。這些可以在大多數(shù)第一代電動(dòng)機(jī)防護(hù)罩的心臟中找到,包括廣受歡迎的V1 Adafruit電動(dòng)機(jī)防護(hù)罩。
關(guān)于在Adafruit學(xué)習(xí)系統(tǒng)中使用裸露的L293D和Arduino的精彩教程:
第16課-步進(jìn)電機(jī)
Adafruit Motor Shield V2 與基于L293D的基本控制器相比,Adafruit Motor Shield V2有了很大的進(jìn)步。 V2屏蔽使用兩個(gè)TB6612 MOSFET驅(qū)動(dòng)器。與L293D相比,TB6612具有兩倍的電流容量和更低的壓降,從而可以更高效地驅(qū)動(dòng)步進(jìn)器。
總共有2個(gè)驅(qū)動(dòng)器芯片和4個(gè)完整的H橋,每個(gè)屏蔽層最多可以驅(qū)動(dòng)兩個(gè)步進(jìn)電機(jī)。驅(qū)動(dòng)器芯片通過專用的PWM驅(qū)動(dòng)器芯片與I2C接口連接。這釋放了許多GPIO引腳供其他用途,并使屏蔽層也可堆疊。您最多可以堆疊32個(gè)驅(qū)動(dòng)器,僅用2個(gè)IO引腳即可控制64個(gè)電機(jī)!
該驅(qū)動(dòng)程序的詳細(xì)信息可以在學(xué)習(xí)系統(tǒng)中找到。
Adafruit Motor Shield V2指南
高級(jí)CNC控制器 gShield和TinyG CNC控制器板使您更接近工業(yè)級(jí)步進(jìn)器性能。這些板具有恒定電流“斬波器”驅(qū)動(dòng)器,可對(duì)其進(jìn)行調(diào)整以從電動(dòng)機(jī)提供最大扭矩和速度。
TinyG CNC具有板載G代碼解釋器和4個(gè)電機(jī)輸出,這使它成為中小型4軸CNC機(jī)床的完整嵌入式解決方案。
如您所料,這些高級(jí),高性能,性能板更復(fù)雜,建議有經(jīng)驗(yàn)的用戶使用。
這些板及其操作的詳細(xì)信息可以在TinyG Wiki和Synthetos論壇中找到。
Synthetos論壇
Tiny G Wiki
將驅(qū)動(dòng)程序匹配到步進(jìn)器
現(xiàn)在,我們來討論最重要的部分:確保您的電動(dòng)機(jī)和驅(qū)動(dòng)器兼容。
電動(dòng)機(jī)和驅(qū)動(dòng)器不匹配會(huì)導(dǎo)致令人失望的性能。或更糟糕的是:電動(dòng)機(jī)和/或控制器損壞。
如果選擇不當(dāng),您可能會(huì)遇到這個(gè)人:
了解驅(qū)動(dòng)器規(guī)格,驅(qū)動(dòng)器規(guī)格中的兩個(gè)最重要的參數(shù)是:
電壓-驅(qū)動(dòng)器可以提供給電動(dòng)機(jī)的最大電壓。
連續(xù)電流-驅(qū)動(dòng)器可以提供給電動(dòng)機(jī)的最大電流。
“峰值”電流額定值不適用于步進(jìn)電機(jī)。始終遵循“連續(xù)”當(dāng)前評(píng)分。
了解電動(dòng)機(jī)規(guī)格,您還需要了解電動(dòng)機(jī)的電氣規(guī)格。有2個(gè)關(guān)鍵參數(shù):
每相安培-這是電機(jī)繞組在不過熱的情況下可以處理的最大電流。
每相電阻-這是每相的電阻。
通常會(huì)給出電壓的額定值。通常是根據(jù)以上兩個(gè)方法計(jì)算得出的-但并非總是如此。最好使用歐姆定律根據(jù)上述參數(shù)來計(jì)算自己。
服從法律! 步進(jìn)電動(dòng)機(jī)的相位是電感,因此它們將抵抗電流的快速變化。但是,在每個(gè)步驟結(jié)束時(shí)或不移動(dòng)時(shí),它們的行為就像純電阻性負(fù)載,并且會(huì)按照歐姆定律起作用。
當(dāng)步進(jìn)電機(jī)消耗最大電流時(shí),仍然保持靜止。因此,歐姆定律允許我們使用電動(dòng)機(jī)規(guī)格來計(jì)算驅(qū)動(dòng)器的電流要求。
電壓=電流x電阻
或
電流=電壓/電阻
》的公式應(yīng)嚴(yán)格應(yīng)用于所有“恒定電壓”步進(jìn)控制器。這包括Adafruit的V1和V2電動(dòng)機(jī)屏蔽罩,以及幾乎所有其他基于L293D的控制器。
但有些電動(dòng)機(jī)的線圈電阻非常低。嚴(yán)格遵循這些公式,驅(qū)動(dòng)電壓將小于5v,性能將不佳。這種類型的電動(dòng)機(jī)對(duì)于恒壓驅(qū)動(dòng)器不是很好的匹配。這些步進(jìn)器需要更專業(yè)的控制器。
超越法律?
不可能欺騙歐姆定律。如果嘗試,則必須回答B(yǎng)lue Smoke Monster。但是,這里還有其他一些法律在起作用。 Lenz,F(xiàn)araday和Ohm律師事務(wù)所的專業(yè)知識(shí)可以幫助您提高電動(dòng)機(jī)的性能。
步進(jìn)線圈通電后會(huì)產(chǎn)生磁場。根據(jù)法拉第定律,不斷變化的磁場在線圈中感應(yīng)出電流。并且根據(jù)倫茲定律,該電流將與創(chuàng)建該場的電流相反。此反向電流稱為“反電動(dòng)勢”或“ 反電動(dòng)勢”。
此反電動(dòng)勢會(huì)增加線圈的“ 阻抗”或有效電阻。因此,歐姆定律仍然適用-但適用于此阻抗,而不適用于簡單的相電阻。此阻抗會(huì)限制每個(gè)步驟開始時(shí)流經(jīng)線圈的電流。
Chopper Drives A 斬波器或“ 恒定電流”驅(qū)動(dòng)器通過以更高的電壓驅(qū)動(dòng)電機(jī)來補(bǔ)償反電動(dòng)勢。使用斬波器驅(qū)動(dòng)器以幾倍于額定電壓的速度驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)是很正常的。
為了在較高的電壓下確保事物的安全,斬波器驅(qū)動(dòng)器還監(jiān)視傳遞到電動(dòng)機(jī)的電流,并在電動(dòng)機(jī)斬波之前對(duì)其進(jìn)行“斬波”。超過預(yù)設(shè)水平。通過以更高的電壓啟動(dòng),斬波器驅(qū)動(dòng)器能夠在步驟開始時(shí)向線圈傳遞更多的電流,從而增加了可用轉(zhuǎn)矩。除了在較低的速度下增加扭矩外,這還允許更高的最高速度。
選擇斬波驅(qū)動(dòng)器并將其配置為特定電動(dòng)機(jī)需要對(duì)電動(dòng)機(jī)和控制器都有很好的了解。
常見問題解答
此電機(jī)可以與我的防護(hù)罩一起工作嗎?
您需要了解電機(jī)規(guī)格和控制器規(guī)格。獲得這些信息后,請檢查“ 將驅(qū)動(dòng)程序匹配到步進(jìn)器”頁面以查看它們是否兼容。
這是NEMA 17,
NEMA幀大小標(biāo)準(zhǔn)僅定義了安裝面板的尺寸。要弄清楚它是否兼容,您需要了解電動(dòng)機(jī)的電氣規(guī)格。
如果沒有電機(jī)怎么辦
?請參閱Jason,了解對(duì)步進(jìn)電線引出線進(jìn)行反向工程的方法。這將告訴您相電阻。對(duì)于相電流,您可以基于類似設(shè)計(jì)和相似相電阻的電動(dòng)機(jī)進(jìn)行估算。
有疑問時(shí),最好還是在安全方面犯錯(cuò)誤,并使用較低的電流!
我的項(xiàng)目需要什么尺寸的電機(jī)?
大多數(shù)電動(dòng)機(jī)都有扭矩規(guī)格-通常以英寸/盎司或牛頓/厘米為單位。 1英寸/盎司表示電動(dòng)機(jī)可以在距軸中心1英寸處施加1盎司的力。例如,它可以使用2英寸直徑的滑輪支撐一盎司。
在計(jì)算項(xiàng)目所需的扭矩時(shí),請確保留有加速和克服摩擦所需的額外扭矩。
如果您的項(xiàng)目需要很大的扭矩而不是太大的速度,請考慮使用齒輪式步進(jìn)器。
怎么辦我將電動(dòng)機(jī)連接到電動(dòng)機(jī)護(hù)罩了嗎?
從Adafruit購買的電動(dòng)機(jī)有接線產(chǎn)品說明中列出的說明
對(duì)于其他電動(dòng)機(jī),請檢查電動(dòng)機(jī)的規(guī)格表(如果有)
如果沒有規(guī)格表,請?jiān)诜聪蚬こ讨袡z查杰森(Jason)的步進(jìn)電線引出線。
此p
首先要確保其電壓不超過 * 通常,您可以在較低的電壓下運(yùn)行電動(dòng)機(jī),盡管轉(zhuǎn)矩會(huì)降低。
下一步,檢查電流額定值。大多數(shù)步進(jìn)模式一次可為兩相通電,因此額定電流至少應(yīng)為電動(dòng)機(jī)每相電流的兩倍。
* 這適用于恒壓驅(qū)動(dòng)器。對(duì)于斬波驅(qū)動(dòng)器控制器,請查看控制器說明。
責(zé)任編輯:wv
-
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3165瀏覽量
149724
發(fā)布評(píng)論請先 登錄
剎車步進(jìn)電機(jī)的特點(diǎn)

步進(jìn)電機(jī)過載怎么處理
步進(jìn)電機(jī)的控制實(shí)現(xiàn)方法

通過具體案例,選擇合適的步進(jìn)電機(jī)
行星減速步進(jìn)電機(jī)與步進(jìn)電機(jī)的區(qū)別

步進(jìn)電機(jī)如何自適應(yīng)控制?步進(jìn)電機(jī)如何細(xì)分驅(qū)動(dòng)控制?
步進(jìn)電機(jī)轉(zhuǎn)速怎么控制高低
什么是混合式步進(jìn)電機(jī)?舉例分析
步進(jìn)電機(jī)的控制技術(shù)及發(fā)展概況有哪些?
步進(jìn)電機(jī)主要有哪些分類?步進(jìn)電機(jī)的主要構(gòu)造是什么?
什么是步進(jìn)電機(jī)?它的工作原理是什么?
步進(jìn)電機(jī)是什么電機(jī)?它的驅(qū)動(dòng)電路的功能是什么
絲桿步進(jìn)電機(jī)和普通步進(jìn)電機(jī)有什么區(qū)別
步進(jìn)電機(jī)型號(hào)與步進(jìn)電機(jī)命名規(guī)則






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論