 fireflyAIO-3288J主板SPI使用介紹
fireflyAIO-3288J主板SPI使用介紹
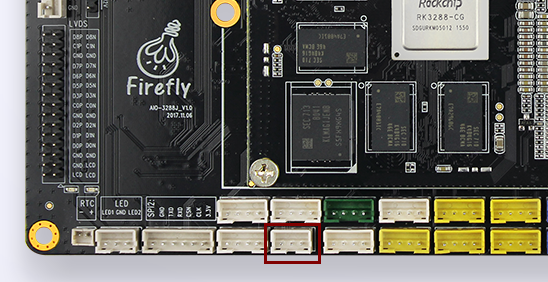
SPI是一種高速的,全雙工,同步串行通信接口,用于連接微控制器、傳感器、存儲設備等,本文以指紋識別模塊為例簡單介紹SPI使用。
SPI以主從方式工作,這種模式通常有一個主設備和一個或多個從設備,需要至少4根線,分別是:
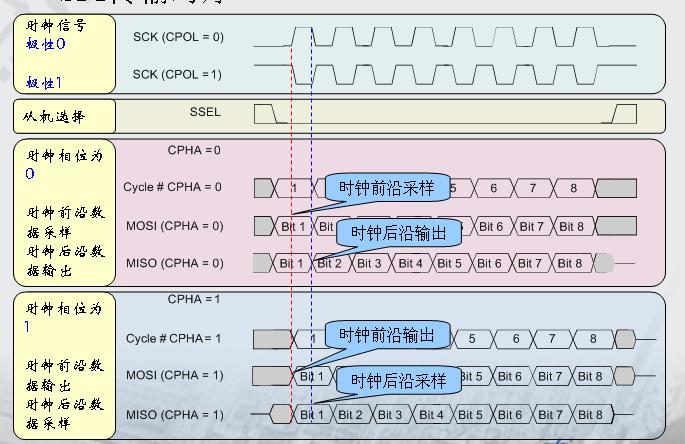
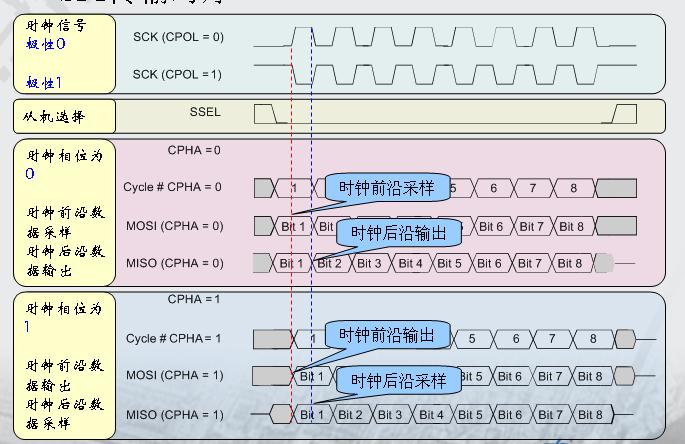
Linux內核用CPOL和CPHA的組合來表示當前SPI的四種工作模式:
CPOL:表示時鐘信號的初始電平的狀態,0為低電平,1為高電平。CPHA:表示在哪個時鐘沿采樣,0為第一個時鐘沿采樣,1為第二個時鐘沿采樣。SPI的四種工作模式波形圖如下:
在內核源碼目錄kernel/drivers/spi/中創建新的驅動文件,如:spi-rockchip-firefly.c 在驅動文件所在目錄下的Kconfig文件添加對應的驅動文件配置,如:
在驅動文件所在目錄下的Makefile文件添加對應的驅動文件名,如:
用make menuconfig在內核選項中選中所添加的驅動文件,如:
在DTS中添加SPI驅動結點描述,如下所示: kernel/arch/arm/boot/dts/firefly-rk3288-aio-3288j.dts
-
status:如果要啟用SPI,則設為okay,如不啟用,設為disable。
-
spidev@00:由于本例子使用的是SPI0,且使用CS0,故此處設為00,如果使用CS1,則設為01。
-
compatible:這里的屬性必須與驅動中的結構體of_device_id 中的成員compatible 保持一致。
-
reg:此處與spidev@00保持一致,本例設為:0x00;
-
spi-max-frequency:此處設置spi使用的最高頻率。
-
spi-cpha,spi-cpol:SPI的工作模式在此設置,本例所用的模塊SPI工作模式為SPI_MODE_1,故設:spi-cpha = <1>,如果您所用設備工作模式為SPI_MODE0,則需在此把這兩個注釋掉,如果用SPI_MODE3,則設:spi-cpha = <1>;spi-cpol = <1>。
在定義 SPI 驅動之前,用戶首先要定義變量 of_device_id 。 of_device_id 用于在驅動中調用dts文件中定義的設備信息,其定義如下所示:
此處的compatible與DTS文件中的保持一致。 定義spi_driver如下所示:
在初始化函數static int __init spidev_init(void)中創建一個字符設備:
向內核添加該設備:
創建設備類:
向內核注冊SPI驅動:
如果內核啟動時匹配成功,則調用該驅動的probe函數。 probe函數如下所示:
如果注冊SPI驅動成功,你可以在/dev/目錄下面看你到注冊的驅動名稱,可以在sys/class/下面看到你注冊的驅動設備類。
寫同步函數:
在本例所用的模塊中,讀數據的過程為:
-
主機向模塊寫寄存器的地址及讀的指令(如:地址為0xf0,讀指令為0x00)
-
模塊收到讀的指令后,數據以頁的形式發送
-
主機設置讀的模式
-
主機讀取一頁數據并存儲
注:Firefly的SPI驅動是Linux下通用的驅動,可以參考源碼:kernel/drivers/spi/spidev.c
-
Linux
+關注
關注
87文章
11446瀏覽量
212663 -
嵌入式主板
+關注
關注
7文章
6096瀏覽量
36127 -
Firefly
+關注
關注
2文章
541瀏覽量
7383
發布評論請先 登錄
fireflyAIO-3288C主板SPI接口簡介
fireflyAIO-3288J主板UART使用簡介
fireflyAIO-3288J主板PWM輸出簡介
fireflyAIO-3288J主板MIPI CSI介紹
fireflyAIO-3288J方案





 工商網監
工商網監
評論