 坦克機器人的制作教程
坦克機器人的制作教程

第1步:切割零件!
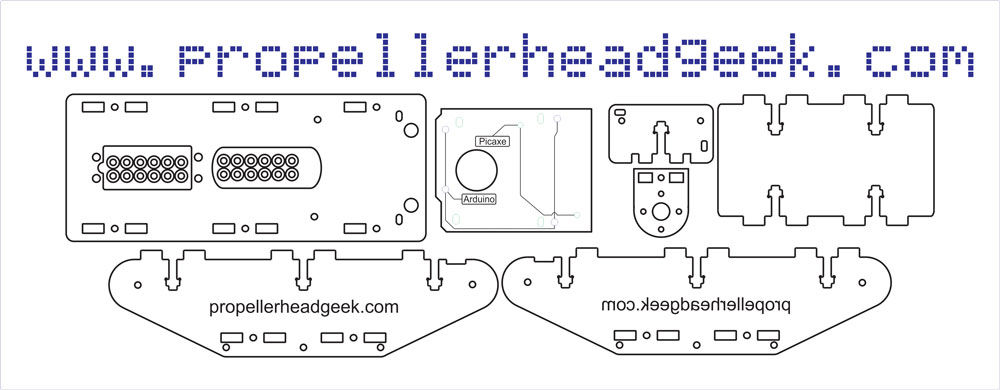
用于CNC的設置很容易適應于CNC。 Epilog螺旋-自底向上雕刻,300DPI;柵格= 57速度,100功率;向量= 8或9速度,100功率,5000頻率。
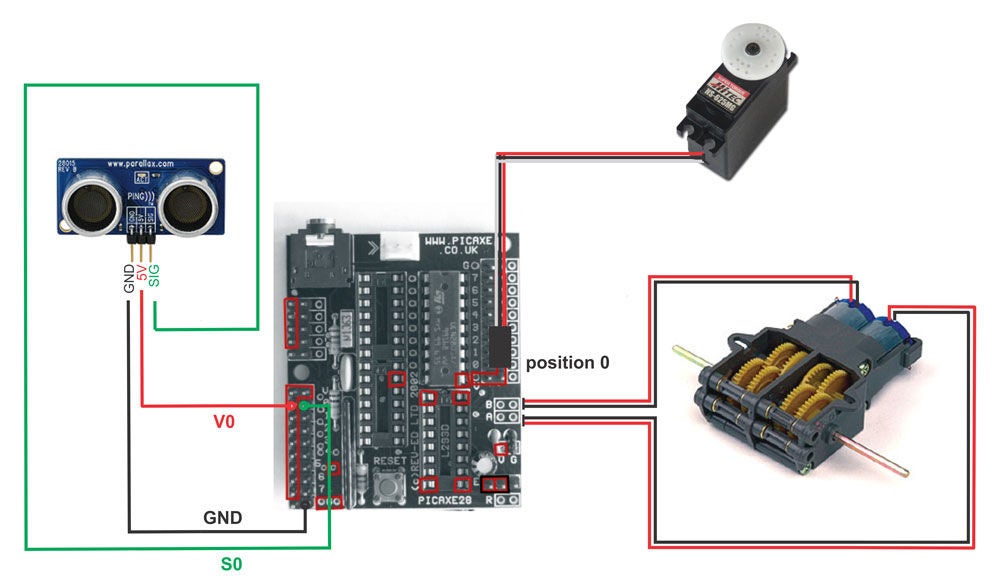
步驟2:接線圖
第3步:組裝您的工具和組件
和往常一樣,不要割斷手指或將熱烙鐵插入其中您的鼻子。..
您將需要:
從您,ponoko或您選擇的類似的
qty 1微處理器(此處使用的picaxe)中購買1個激光切割零件
qty 1 p視差ping,SRF04,SRF05或IR測距儀(此指示中使用的ping)
qty 1 Tamiya 70097電動機/變速箱組合
qty 1 Tamiya 70100履帶和車輪機械套件
qty 1標準或微型伺服器(推薦標準)
qty 3伺服擴展器(公對公),或用電線和母頭自己動手 4.5“螺釘和螺母尺寸4-40(在五金店)
數量4-40(硬件商店)的數量為16 .75的螺釘和螺母
萬用表和烙鐵(如果您自己制作電線)
步驟4:組裝測距桅桿
您需要測距桅桿的2個組件,2個墊片,2個.5 4-40螺釘和螺母,1個.75 4-40螺釘和螺母。
步驟5:頂層甲板/電子平臺
您將需要2 .75 4-40螺絲+頂板螺母和2 .75 4-40螺絲+螺母和4個墊片,用于電子板+微控制器。
步驟6:側面/Tamiya 70097電機變速箱/組裝
您將需要Tamiya 70097 + 2面來創建此組裝。
步驟7:完整框架/電子甲板/伺服器
您將需要先前的裝配,以及此裝配的頂部和下部甲板。使用數量為10 .75 4-40的螺釘+螺母完成此步驟。
您將需要數量為4 4-40的螺母將電子元件面板安裝到主機架上。
您將需要數量為2 .5 4至40個螺釘+螺母來固定伺服器。 -同樣,在安裝頂板之前,請先安裝伺服器。..
步驟8:輪桿/車輪/胎面/聲納桅桿
在這里無需多說。。不需要其他部分。所以。..
步驟9:
責任編輯:wv
-
機器人
+關注
關注
213文章
29730瀏覽量
212833 -
電動機
+關注
關注
75文章
4160瀏覽量
98737
發布評論請先 登錄





 工商網監
工商網監
評論