 使用LM324的聲音傳感器的制作
使用LM324的聲音傳感器的制作
步驟1:試驗板
我嘗試了幾種電容式麥克風電路,但對結果不滿意。
我想要一個聲音傳感器,當聽到相對較大的聲音時,它將輸出電壓。即分米。不能太敏感以至于需要“忽略”背景聲音,而只拾取諸如命令聲音之類的局部噪音。
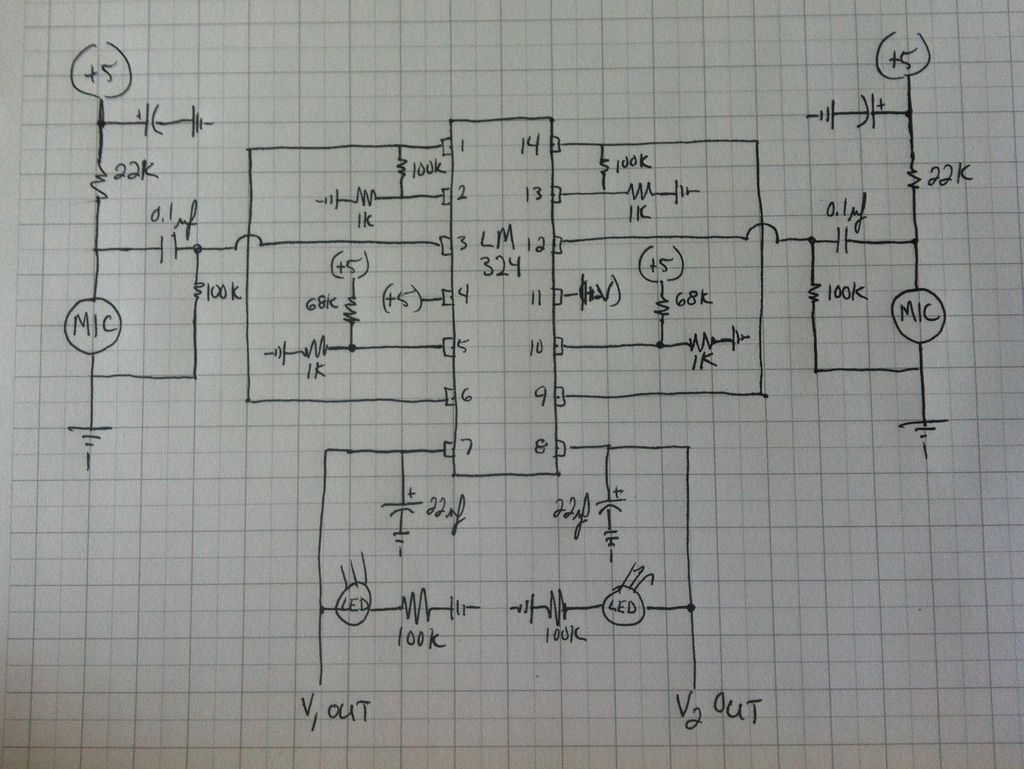
聲音傳感器還需要左右左右兩個2個“耳朵”輸入,這樣我就可以比較如果需要的話,聲音就來了。
diybloke所做的工作使我朝著正確的方向前進。我的最后回合非常接近他。
步驟2:原理圖
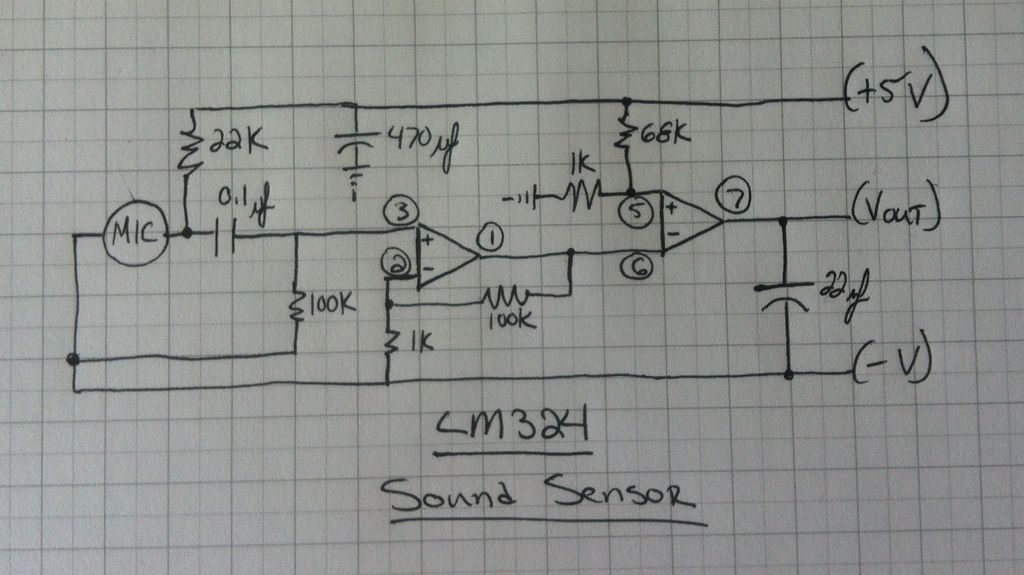
我發現使用2運放來調節麥克風信號是否僅使用了放大器上的+輸入,就產生了麥克風所聽到聲音的相當不錯的放大器聲音,但我沒有看到可用的良好電壓變化。但是,盡管最終輸出的聲音質量不是很好,但將第一放大器的輸出饋送到第二放大器的反相端給了我想要的電壓變化。但是出于我的目的,這并不重要。
上面的第一個原理圖實際上是最終傳感器的1/2,但為簡單起見,不宜以此開頭。
需要的零件:
運算放大器x 2
我正在使用1/2 LM324
電容麥克風x 1
100K x 2
1k x 2
22k x 1
68k x 1
22uf x 1 《470》 x 1
0.1 X 1
第二張圖片是完整的聲音傳感器電路,LED顯示信號從兩個通道輸出。
步驟3:焊接
上面是我如何在項目板上布置電路的照片。經過測試,我并沒有弄亂任何東西,然后將LED移除,并添加了另一對端子連接器,以輸出到我的邏輯顯示器和其他地方以使用信號。
完成!!!!
第4步:最終注釋
進行最終安裝機械手A3-8D型我將這個聲音傳感器與一個二進制計數器電路堆疊在一起,并將這對傳感器安裝在lexan塑料的廢料價格上。
上面第一張圖片左側的那對板是從舊貨店搶救的音頻放大器電路。電話基座揚聲器單元。這些只是簡單地安裝到我喜歡#276-150的無線電棚板上。 Lexan支架上搭載的小電路是12V至5V穩壓器。
麥克風及其安裝在最后的照片中。它們安裝在機器人頭部的任一側。就目前而言,傳感器僅在聽到聲音時才用LED指示,我打算將這些輸出用作對機器人arduino處理器的反饋。
-
LM324
+關注
關注
16文章
166瀏覽量
65769 -
聲音傳感器
+關注
關注
4文章
56瀏覽量
15569
發布評論請先 登錄






 工商網監
工商網監
評論