 聲控機器人的制作
聲控機器人的制作

步驟1:要點:
您將需要以下項目或等效項目。
2)任何Arduino板(在此項目中,我使用Arduino UNO)。
3)Rover 5或任何RC汽車。
4)Rover 5電動機驅動器板。
5)跳線。
步驟2:電機驅動器說明:
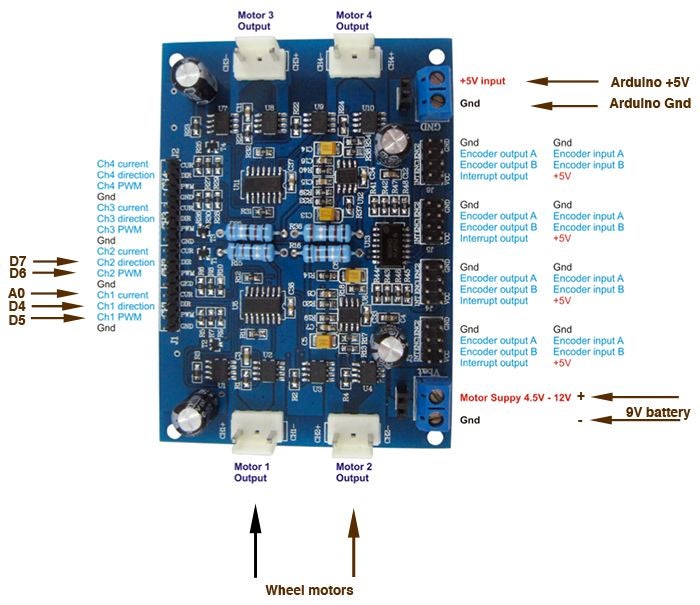
此電機驅動器可以是只需將邏輯0或1施加到該電機的方向引腳上,并將PWM信號施加到速度引腳上即可進行控制。這樣,僅需8個GPIO引腳即可獨立控制四個單獨的電動機的速度和方向。有關更多詳細信息,請查看用戶手冊。
步驟3:1Sheeld解釋:
1Sheeld Android Smartphone Multi-Purpose Shield是易于配置的Arduino屏蔽。它連接到一個移動應用程序,該應用程序可以使用所有Android智能手機的功能,例如LCD屏幕,陀螺儀,開關,LED,加速計,磁力計,GSM,Wi-Fi,GPS…等。
如何使用1sheeld?
1-將1Sheeld堆疊在Arduino板上,并使用1Sheeld庫編寫代碼。
2-將1Sheeld板與藍牙上的1Sheeld應用程序配對。
3-從40多個盾牌列表中選擇盾牌。
有關1sheeld的更多信息和入門方法,請訪問1Sheeld Tutorials Archive
步驟4:如何連接電路?
如上圖所示,將電動機1和電動機2連接起來。
通道1將Arduino中的引腳4連接到方向引腳,并將Arduino中的引腳5連接到PWM引腳。然后對于通道2,將方向引腳連接到Arduino中的引腳7,將pwm引腳連接到Arduino中的引腳6。
第5步:如何工作?
打開1sheeld應用,將其與1sheeld連接,然后選擇語音識別器防護罩。
當您說向前移動時,機器人將向前移動。
當您說向后移動時,它向后移動。
當您說向左移動時,它向左轉。
當您說對時,它會向右轉。
當您說停止時,它會停止。
您可以隨意更改語音命令,只需在碼。
責任編輯:wv
-
機器人
+關注
關注
213文章
29728瀏覽量
212820 -
聲控
+關注
關注
3文章
93瀏覽量
33348
發布評論請先 登錄





 工商網監
工商網監
評論