") 怎樣修復(fù)Fusion 360中的自相交T樣條錯(cuò)誤
怎樣修復(fù)Fusion 360中的自相交T樣條錯(cuò)誤

步驟1:記下所有錯(cuò)誤
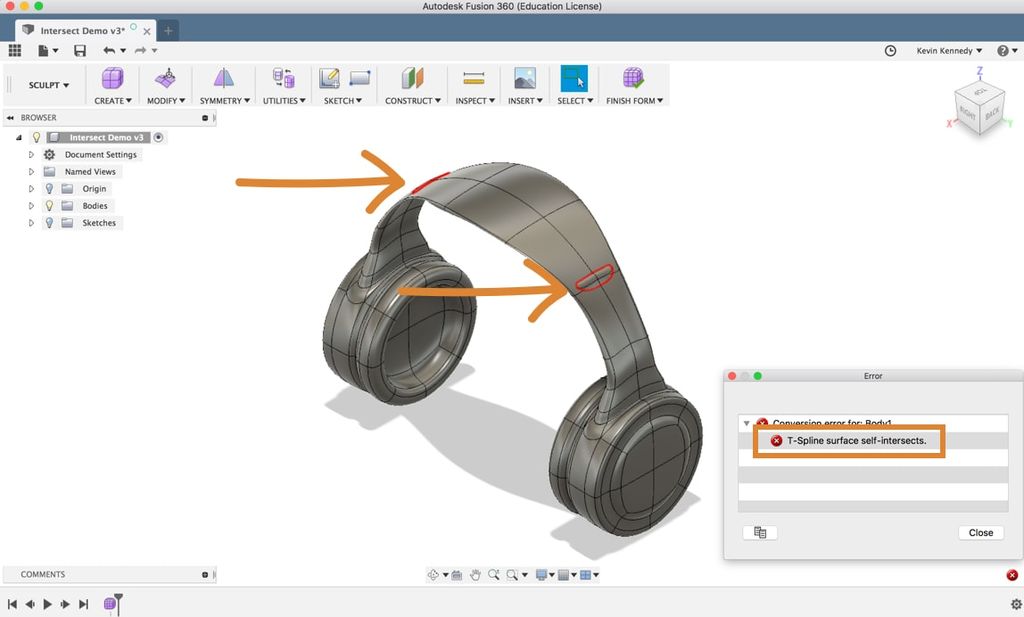
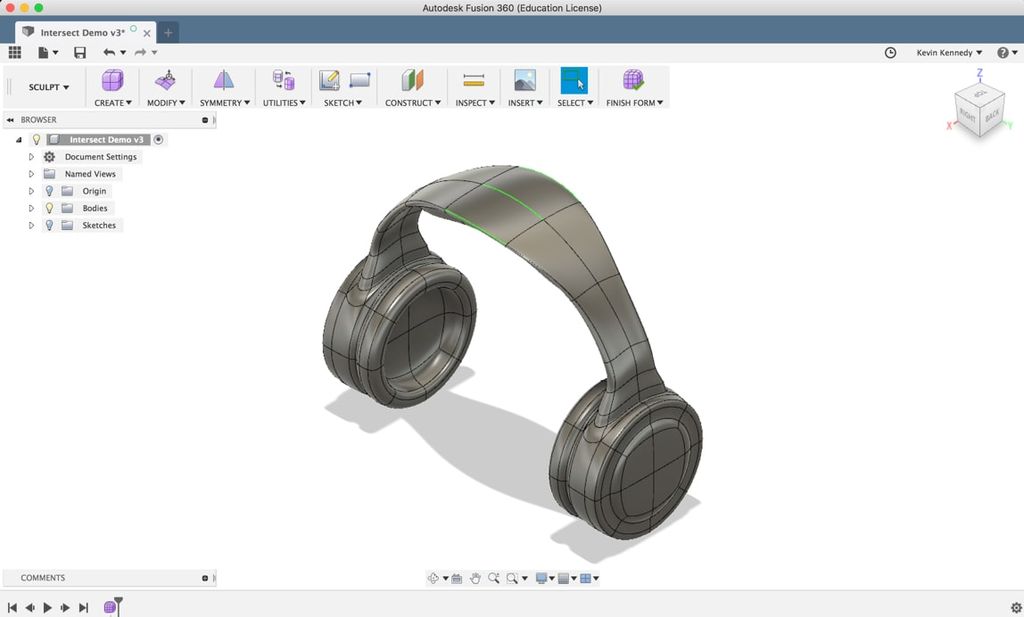
首先,點(diǎn)擊Fusion 360工具欄中的“完成表格”按鈕。然后,記下模型上的錯(cuò)誤。它們都將以紅色突出顯示。根據(jù)您的模型和錯(cuò)誤,您可能最終需要修復(fù)多個(gè)點(diǎn),并且可以。我建議一個(gè)一個(gè)地解決每個(gè)錯(cuò)誤,除非您的模型是對(duì)稱的。如果您的模型是對(duì)稱的,那么您可以立即啟用對(duì)稱性以修復(fù)多個(gè)錯(cuò)誤(稍后會(huì)詳細(xì)介紹)。
如果我們看一下我雕刻的這款耳機(jī)模型,您會(huì)發(fā)現(xiàn)我頭帶兩側(cè)都有自相交誤差。看來(lái)我推或拉得太遠(yuǎn),導(dǎo)致填充區(qū)域的邊緣或面與頭帶的面發(fā)生碰撞。
步驟2:檢查修復(fù)體是否存在錯(cuò)誤
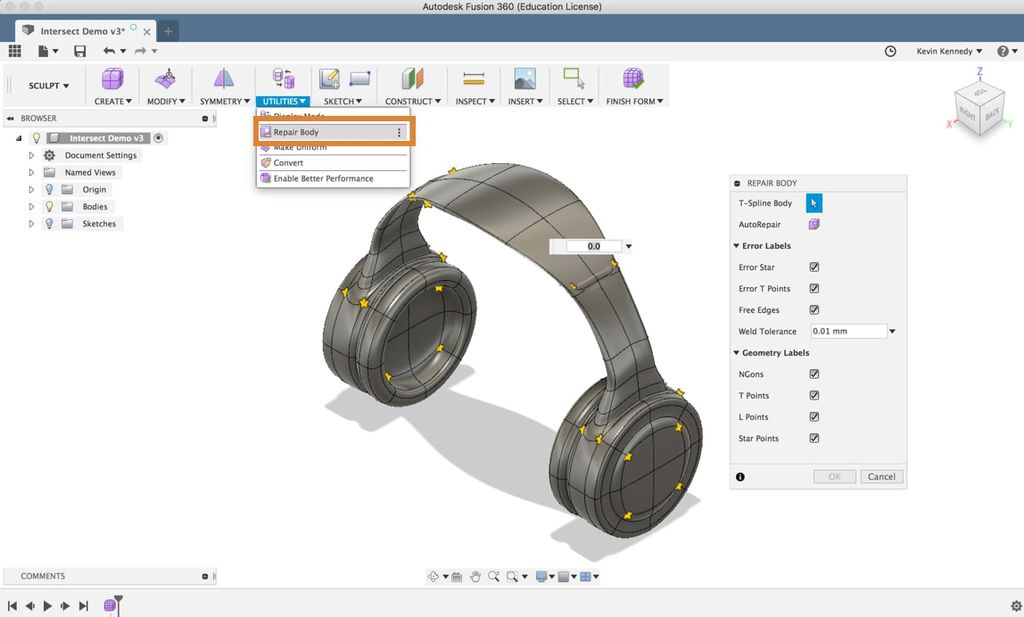
在記下錯(cuò)誤的位置后,應(yīng)檢查“修復(fù)正文”命令。 repair body命令可能無(wú)法修復(fù)您的自相交錯(cuò)誤,但至少會(huì)通知您t樣條曲線模型是否有t點(diǎn)或星點(diǎn)錯(cuò)誤。
從“實(shí)用程序”下拉列表中選擇“修復(fù)車身”。然后,首先必須選擇對(duì)話框中所示的t樣條曲線主體。選擇t樣條曲線主體后,您可以選擇打開(kāi)和關(guān)閉不同的錯(cuò)誤標(biāo)簽以進(jìn)行檢查。
如果單擊“修復(fù)主體”,它什么也沒(méi)做……那太好了!這意味著它沒(méi)有檢測(cè)到任何t點(diǎn)或星點(diǎn)錯(cuò)誤。如果它確實(shí)檢測(cè)到一些錯(cuò)誤,通常會(huì)看到星星的顏色從紅色變?yōu)辄S色。
為簡(jiǎn)要解釋星點(diǎn)錯(cuò)誤。星點(diǎn)是指具有3個(gè),5個(gè)或更多個(gè)面都收斂于單個(gè)點(diǎn)的任何點(diǎn),本質(zhì)上是星形的。如果星星為黃色,則表示一切正常。但是,如果星形為紅色,則可能存在邊/面不切線或共線的問(wèn)題。星點(diǎn)還決定了如何將t樣條轉(zhuǎn)換為BREP。將t樣條曲線轉(zhuǎn)換為BREP時(shí),它將在每個(gè)星形點(diǎn)處拆分為單獨(dú)的曲面。
另一方面,t點(diǎn)是面會(huì)聚成t形的區(qū)域。 T點(diǎn)通常是人臉以垂直方式會(huì)聚并形成“ T”形的區(qū)域。
步驟3:切換到框顯示模式
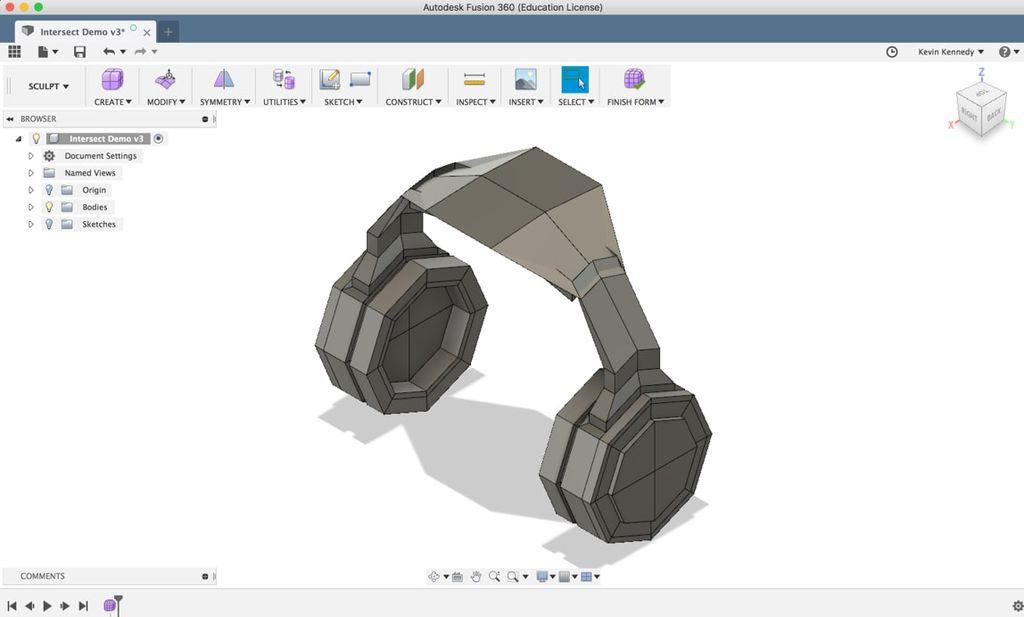
檢查“修復(fù)正文”工具是否將修復(fù)任何錯(cuò)誤之后,下一步是通過(guò)在Mac上按CTRL + 1或在Option +上將CTRL + 1切換到框顯示模式在Windows上為1。您還可以通過(guò)選擇“實(shí)用程序”下拉列表,然后選擇“顯示模式”,切換到框模式。然后,在顯示模式對(duì)話框中,可以選擇第一個(gè)圖標(biāo),即“框顯示”。
使用盒子顯示模式不僅可以更輕松地發(fā)現(xiàn)自相交的錯(cuò)誤,還可以幫助您選擇正確的面孔以進(jìn)行修正。
此耳機(jī)示例模型是對(duì)稱的,因此我將打開(kāi)對(duì)稱以節(jié)省時(shí)間。這樣,我只需要固定一側(cè),另一側(cè)會(huì)相應(yīng)地更新。要打開(kāi)對(duì)稱性,請(qǐng)從對(duì)稱性下拉列表中選擇“鏡像”。然后,首先在模型的一側(cè)單擊,然后在相反的面上單擊(第二個(gè))。然后,您將看到綠色的對(duì)稱線,顯示對(duì)稱線的位置。
步驟4:移動(dòng)面和邊緣
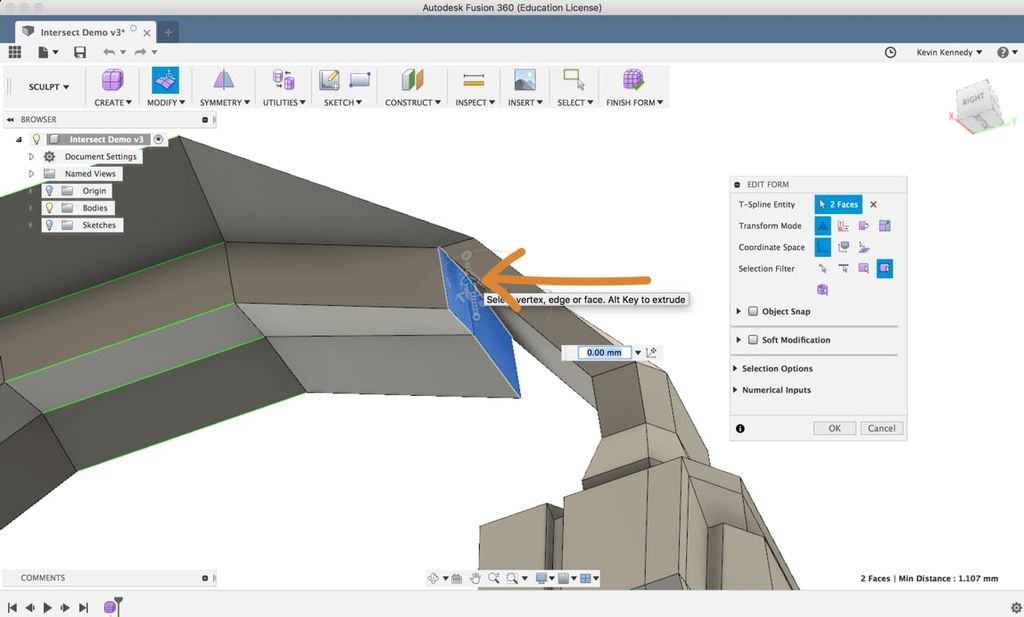
一旦啟用了框模式并且對(duì)稱(如果適用),您將需要放大需要修復(fù)的面。然后,按住鍵盤上的Shift鍵,然后選擇看起來(lái)相交的面。
下一步,右鍵單擊并選擇編輯表單。
您將要使用任何編輯表單圖標(biāo)中的圖標(biāo)以將其從相交的面移開(kāi)。 (如果您不熟悉編輯表單圖標(biāo),請(qǐng)查看它們上的視頻。)我認(rèn)為,當(dāng)您嘗試將人臉從交點(diǎn)移開(kāi)時(shí),單軸箭頭將是最有用的。
第5步:檢查錯(cuò)誤是否已修復(fù)
將面孔移開(kāi)后,應(yīng)該檢查一下是否已修復(fù)錯(cuò)誤信息。您可以在編輯表單對(duì)話框中單擊“確定”以確認(rèn)更改。然后按CTRL + 3(Mac)或Option + 3(Windows)切換回“平滑顯示”模式。
在這一點(diǎn)上,您應(yīng)該能夠判斷出這些面孔是否看起來(lái)像它們不再相交。
步驟6:?jiǎn)螕艄ぞ邫谥械摹巴瓿杀韱巍?/p>
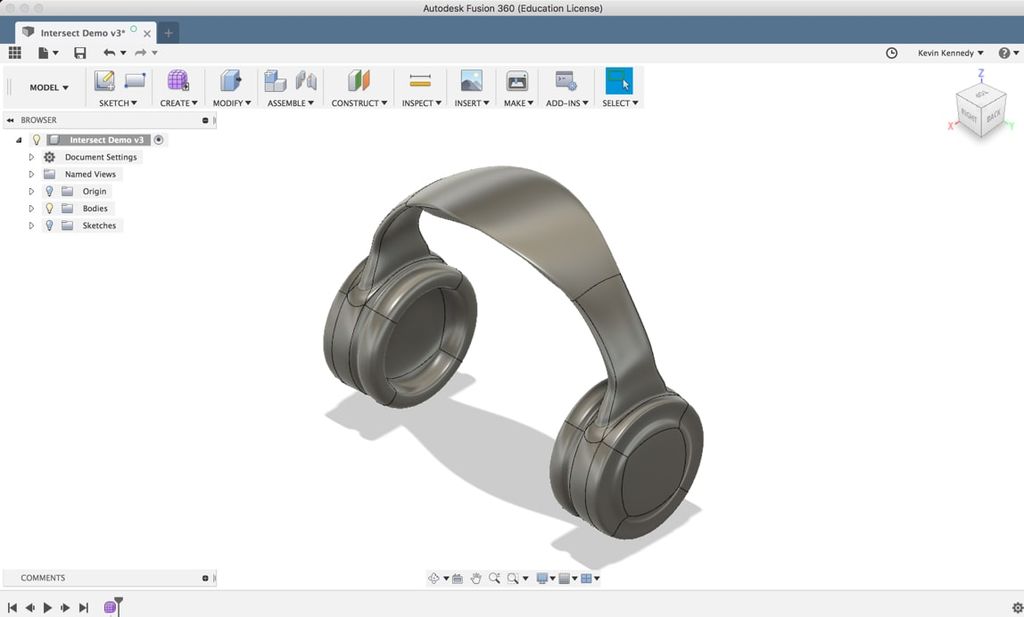
選擇完成表單,看看您的模型現(xiàn)在是否可以
第7步:修復(fù)自相交的身體清單(摘要)
如果您在自相交中遇到自相交錯(cuò)誤雕刻環(huán)境,然后建議遵循以下核心步驟:
記下自相交錯(cuò)誤的位置(以紅色突出顯示)
檢查維修車身工具
切換到框顯示模式
使用編輯表單操縱器操縱相交的面
檢查是否現(xiàn)在可以轉(zhuǎn)換模型。如果沒(méi)有,請(qǐng)重復(fù)前面的步驟,直到不再相交為止。
責(zé)任編輯:wv
-
軟件
+關(guān)注
關(guān)注
69文章
5152瀏覽量
89208
發(fā)布評(píng)論請(qǐng)先 登錄
VirtualLab Fusion應(yīng)用:?jiǎn)屋S晶體中的偏振轉(zhuǎn)換
VirtualLab Fusion應(yīng)用:用于X射線束的掠入射聚焦鏡
VirtualLab Fusion應(yīng)用:使用optiSLang進(jìn)行光柵優(yōu)化
VIRTUALLAB FUSION應(yīng)用:光束切趾建模
VirtualLab Fusion應(yīng)用:雙軸晶體中的錐形折射
VirtualLab Fusion中的可視化設(shè)置
VirtualLab Fusion應(yīng)用:仿真結(jié)果的格式&定制
VirtualLab Fusion應(yīng)用:靈活的區(qū)域定義
VirtualLab Fusion應(yīng)用:光波導(dǎo)應(yīng)用中的光柵分析
VirtualLab Fusion應(yīng)用:光波導(dǎo)系統(tǒng)中光柵幾何結(jié)構(gòu)的優(yōu)化
RTOS中的錯(cuò)誤檢查機(jī)制
Fusion應(yīng)用板用戶指南

SRAM中的錯(cuò)誤檢測(cè)
AT360-6T杭州中科微授時(shí)模塊原理
AT360-6T杭州中科微GNSS授時(shí)模塊






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論