 拇指機器人的制作教程
拇指機器人的制作教程
第1步:ARDUINO零件
安裝Arduino IDE
安裝CH340驅動程序(中文版)
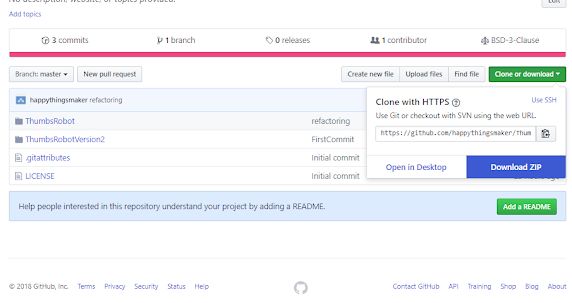
下載 - 源代碼
正如您所看到的,有一個zip文件。提取所有文件并雙擊源代碼文件。
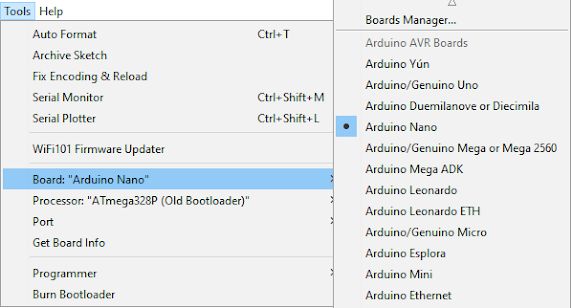
Arduino Nano
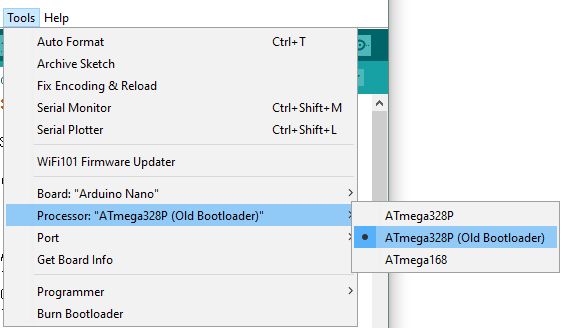
ATmega328P(舊的Bootloader)
插上你的arduino nano
插上USB線和一個新端口將出現。
查找/選擇新興的COM端口
單擊出現的端口并點擊上傳按鈕
點擊上傳按鈕
第2步:3D打印部件
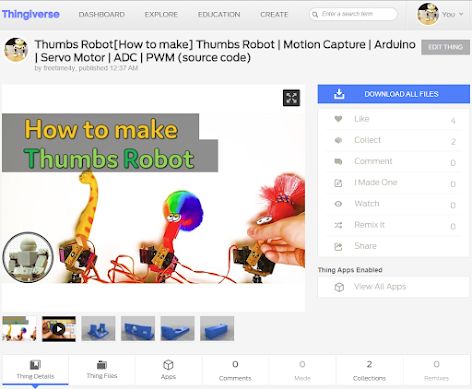
下載3d建模來自Thingiverse的文件
https://www.thingiverse.com/thing:2844993
逐個打印所有部件
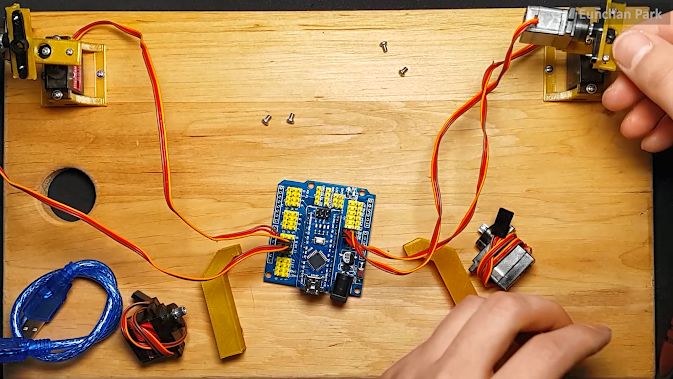
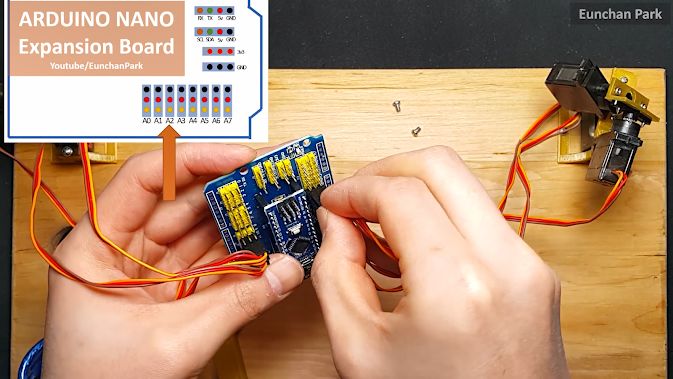
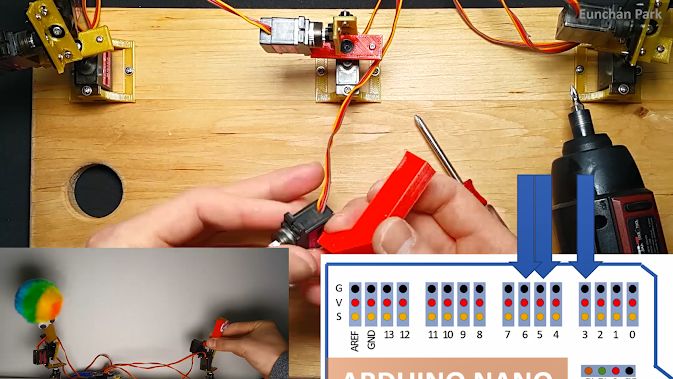
步驟3:電路部件
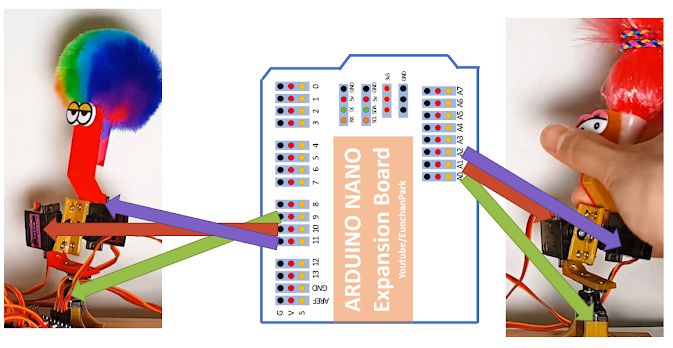
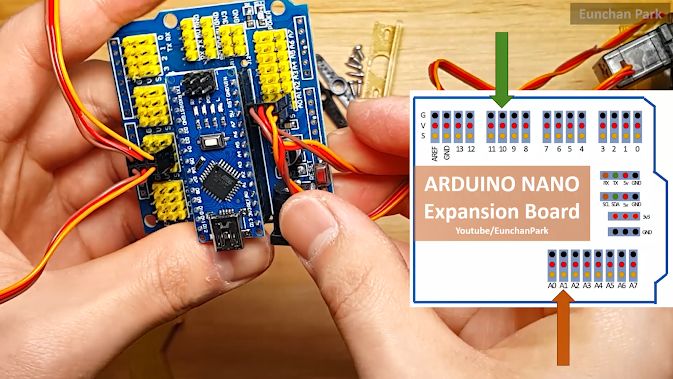
使用Arduino Nano擴展板。由于Arduino Nano本身沒有很多引腳,因此您需要使用擴展板。
當您查看連接到電機的接線時,您可以看到三種顏色。黃色,紅色和棕色。布朗必須與G(地面)連接。
在以下步驟中,我們將再次仔細查看。
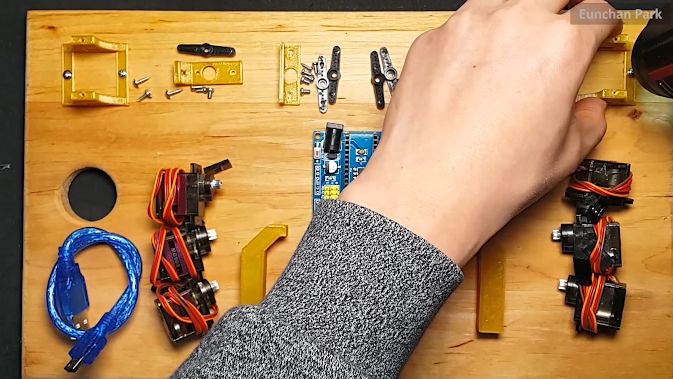
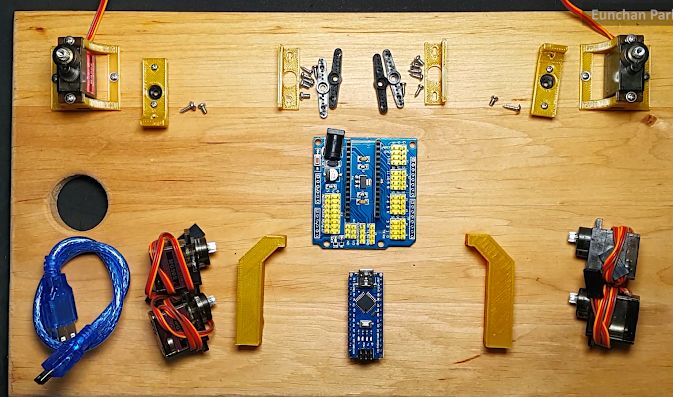
步驟4:硬件部分 - 準備所有部件
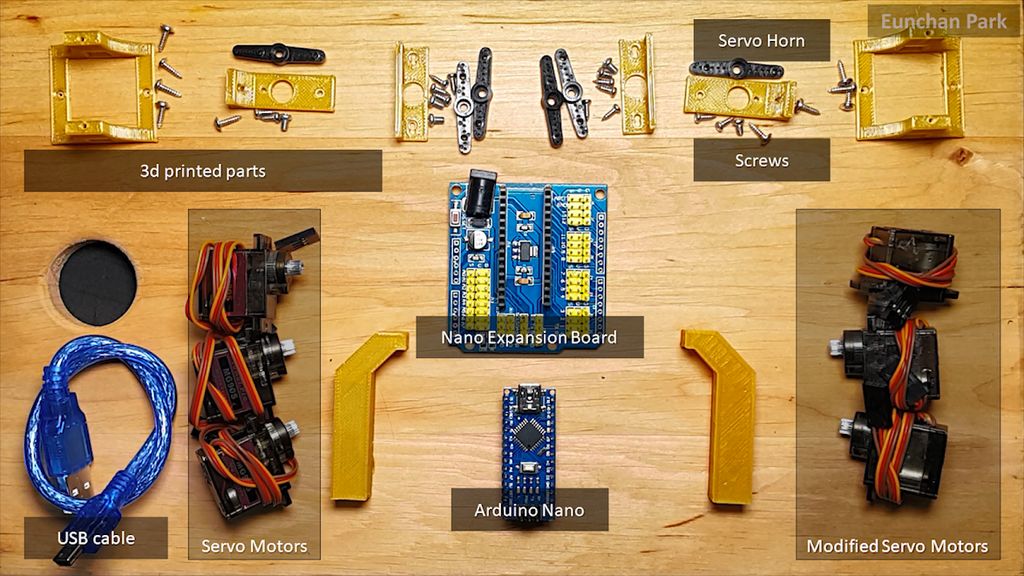
[零件]
1 x Arduino Nano
1 x Arduino Nano擴展板
6 x伺服電機
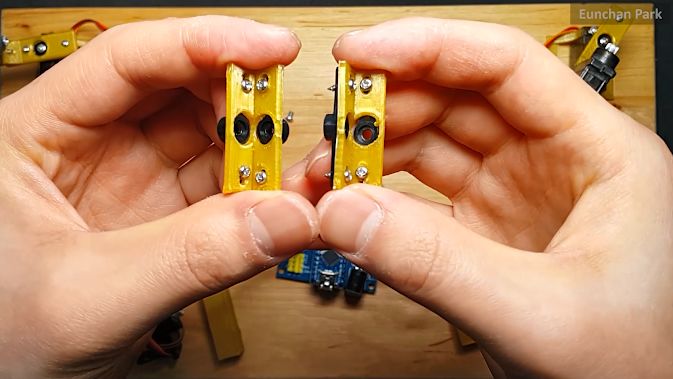
2 x玩具眼球
12 x螺栓(2 * 6mm)
[工具]
3d打印機(Anet A8)https://amzn.to/2IwISNA
用于3D打印的平面(PLA 1.75mm)https://amzn。 to/2k5AFVS
Wire Nipper https://amzn.to/2INZILg
線材Stipper https://amzn.to/2LaVeN5
熱熔膠槍https://amzn.to/2IOE3Ta
螺絲刀(+)https://amzn.to/2k8b4M8
電子膠帶https://amzn.to/2IMx9xx
焊接工具(Hakko)https://amzn.to/2k50bKP
焊接手https://amzn.to/2It2Ybq
電動螺絲刀https://amzn.to/2IdWpJh
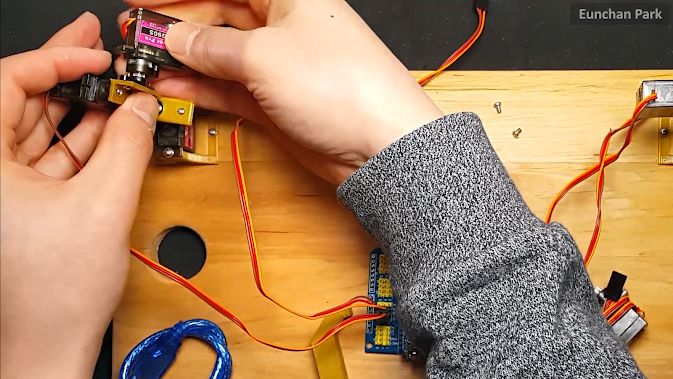
第5步:將3個伺服電機修改為位置傳感器
以下步驟說明如何修改伺服電機進入位置傳感器。基本上大多數伺服電機都有一個電位計或編碼器來獲取角度值。
我們將使用該電位計本身。我們需要打開機箱,拆開電路板并重新連接。
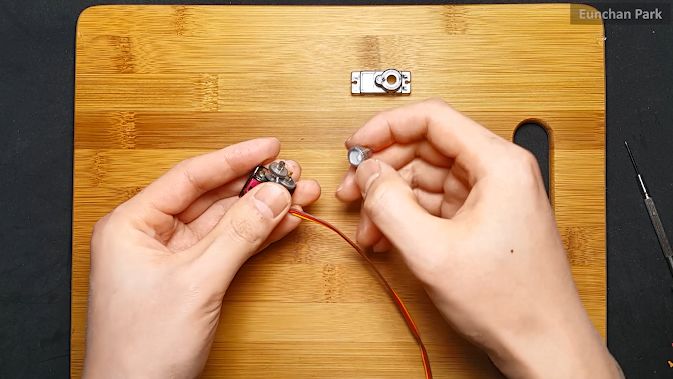
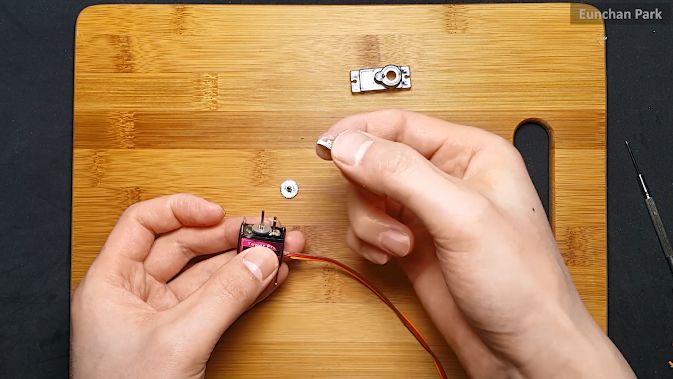
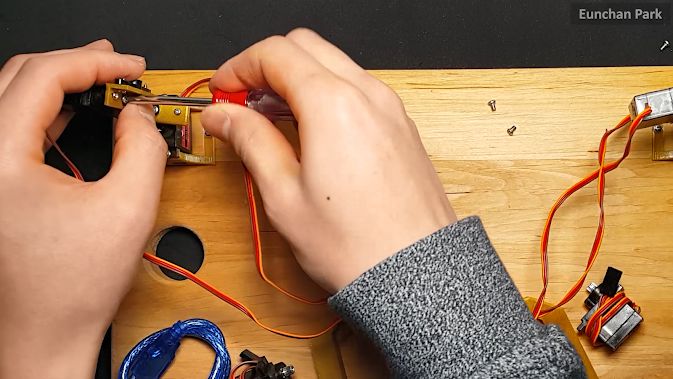
步驟6:擰開背面的4個螺栓并打開前殼
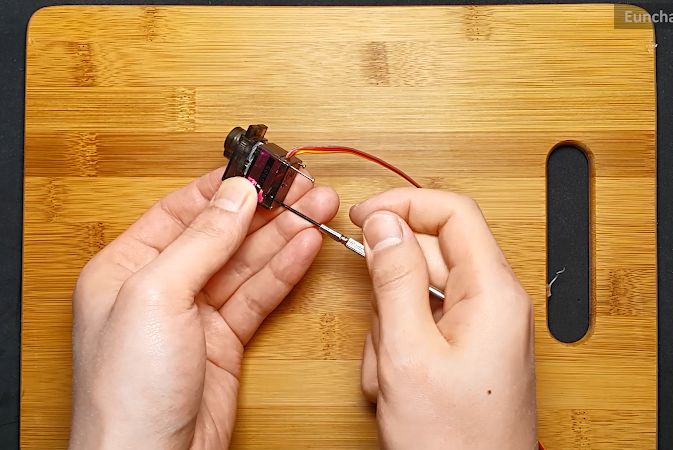
你需要一個小螺絲刀,因為它們太小了。電機有3個部分 - 前部,主體和后部。
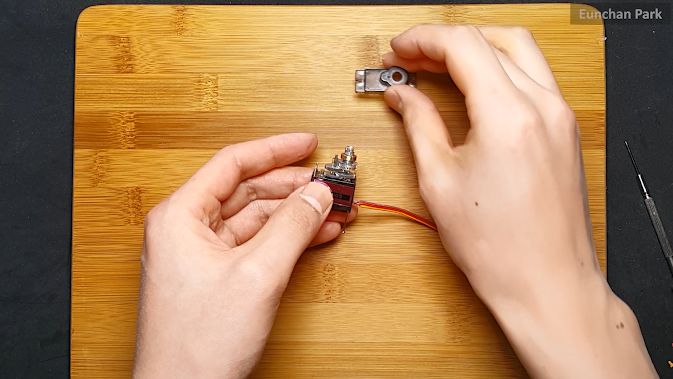
當您打開前側時,您將看到齒輪。實際上,我們不使用這種電機作為“電機”。因此,理論上不再需要齒輪。但是我們將使用它們的一部分,以便操作角度仍然具有旋轉限制。
步驟7:刪除第3檔

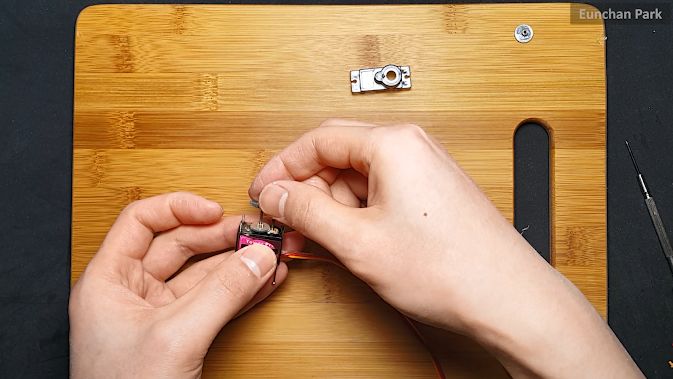
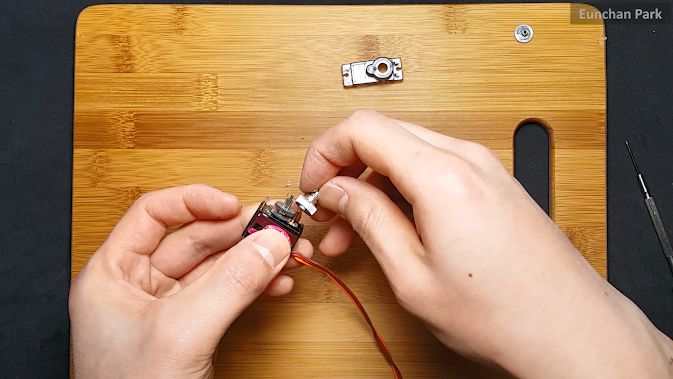

伺服電機中的電位器具有大約180度的角度限制。電位器有自己的限制機制,但它很弱。它很容易被打破。為了保護它,齒輪提供了另一種機制。第一齒輪具有塑料緩沖器,其將與第二齒輪接觸。
我們肯定需要整體框架的第一檔,第二檔需要限制。所以,我們無法擺脫它們。而不是他們,我們可以刪除第三檔。
你可能想知道為什么我們需要拆卸裝備。這三個伺服電機將用于獲取角度信息。如果它們中有齒輪,則運動會變硬。因此,我們必須擺脫其中一個裝備。
步驟8:重新布線/焊接
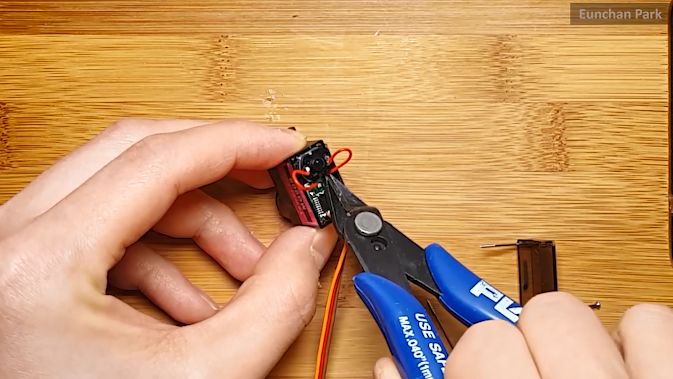
切割與電機連接的電線。
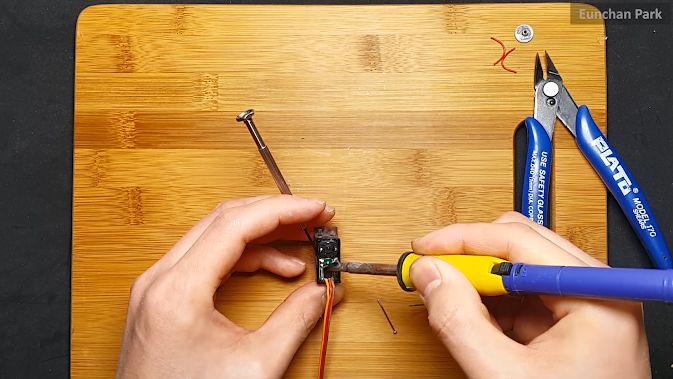
步驟9:使用焊接工具并拆下電路板
步驟10:切斷電線并準備焊接

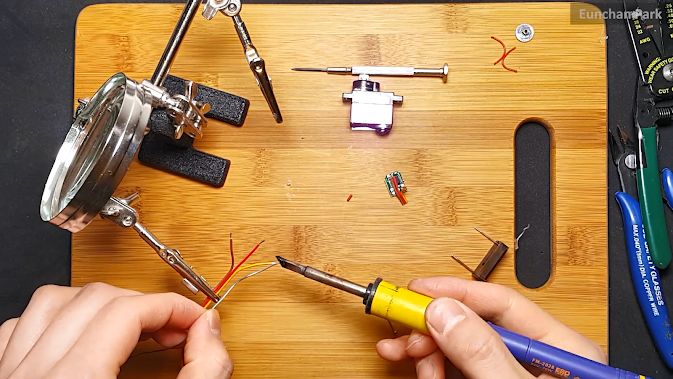
然后放一些粘貼并在電纜上放一些鉛
步驟11:焊接它

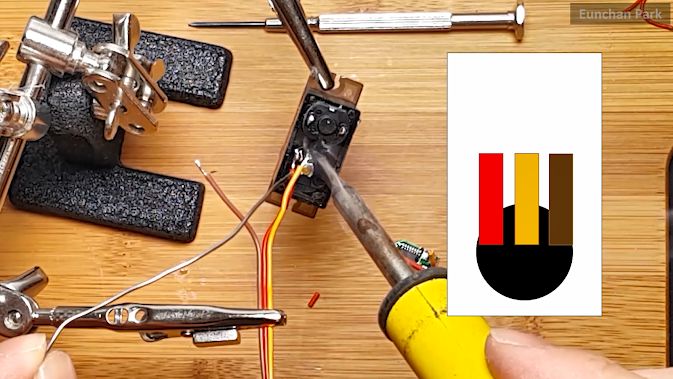

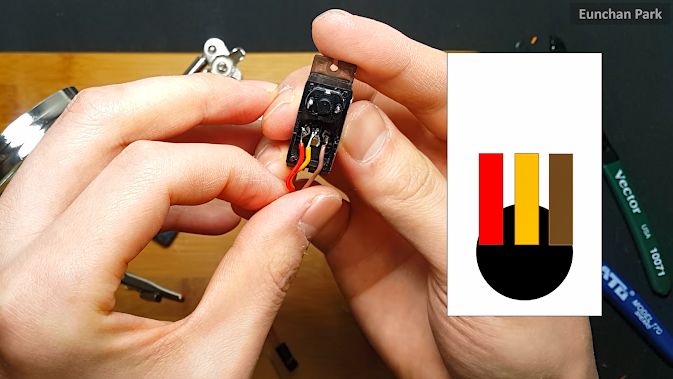
從左側紅黃色和棕色
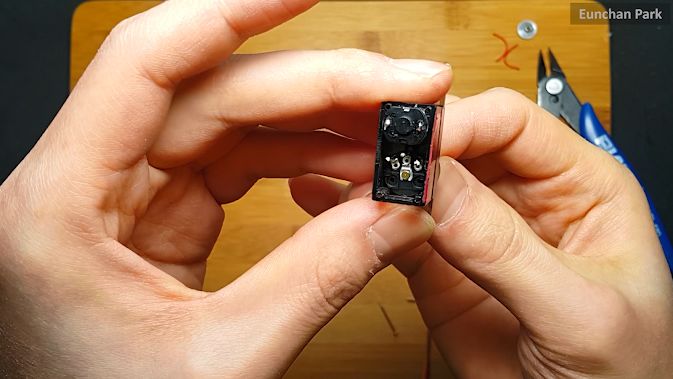
第12步:在上面添加一些膠水


并恢復其背面
我們還需要2個電位器。為另外兩臺電機做同樣的工作
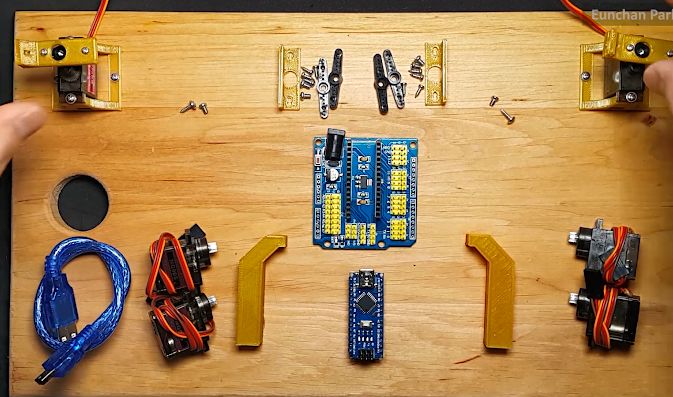
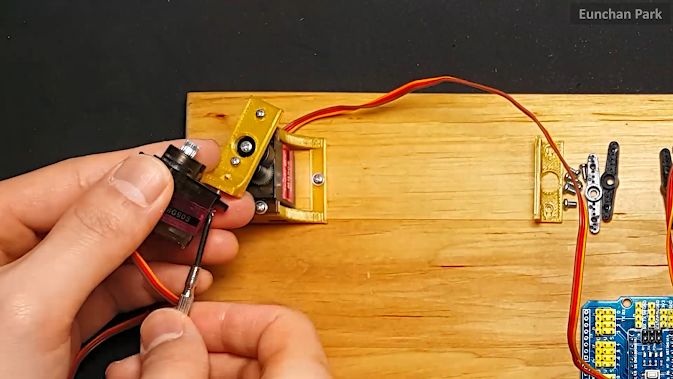
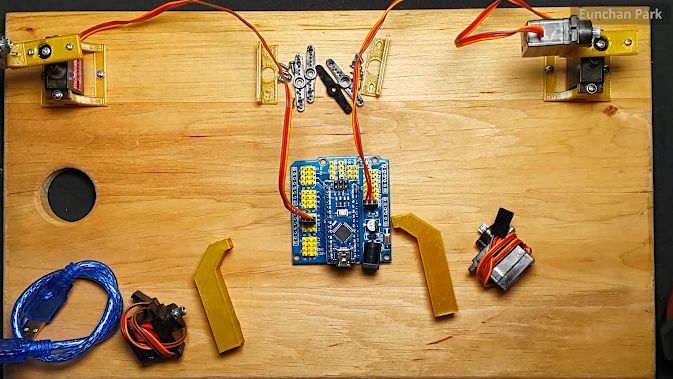
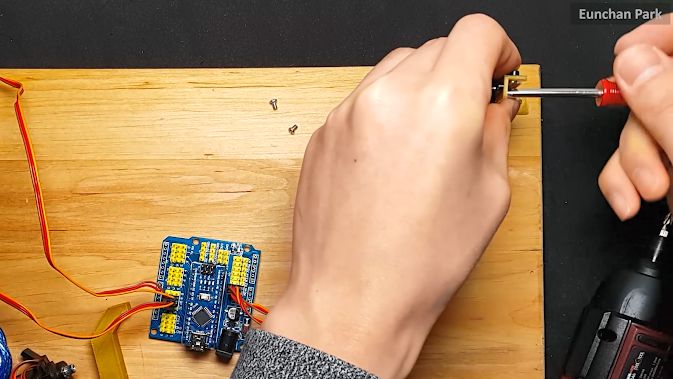
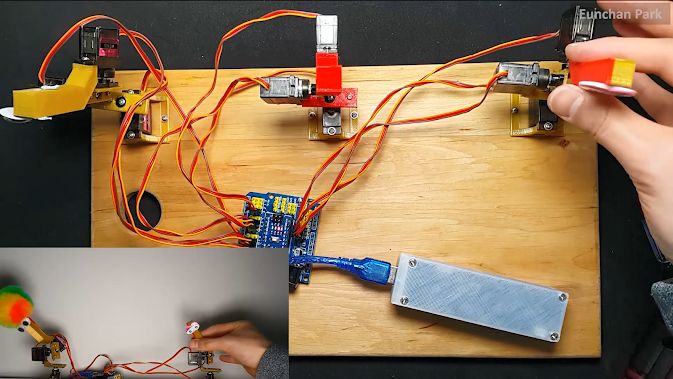
步驟13:建立第一個聯合地下室



我用了一個烹飪板來制作這個項目。使用它既便宜又堅固。為了將框架固定在電路板上,您需要使用具有尖端的螺釘。它同時制作孔和線。
共有6臺電機。左側的3個電機是原裝電機。另一方面,有3個電機在步驟之前被修改。
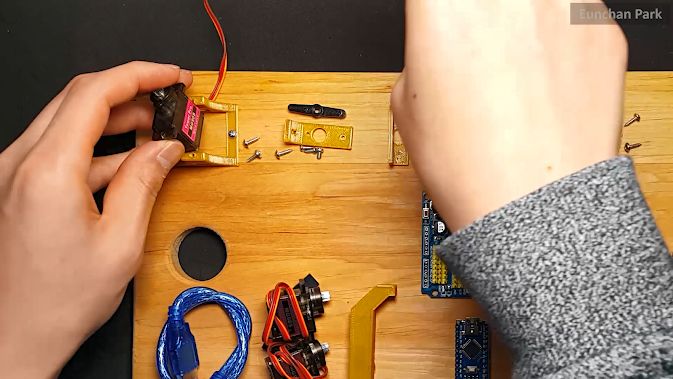
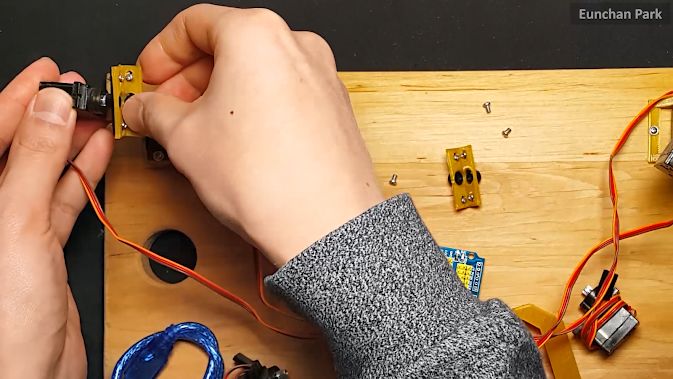
步驟14:制作偏航關節

您將需要使用M2 * 6mm螺栓。
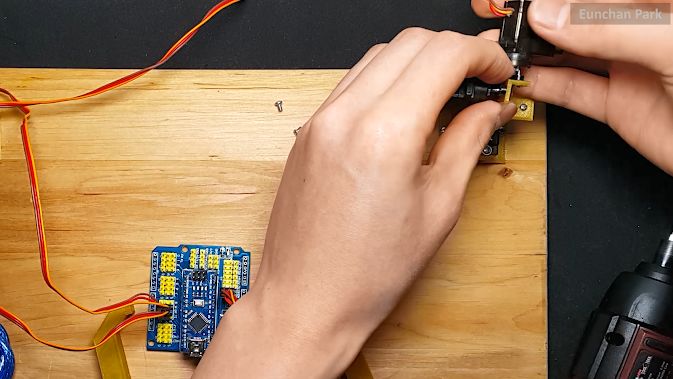
步驟15:使用第一臺電機組裝偏航接頭
正如您可以看到最后一張圖片,您需要將關節置于水平方向。并且位置應該是電機和電位計的90度。
換句話說,您可以從那個位置順時針和逆時針旋轉那些偏航接頭90度。
步驟16:使用Arduino Nano擴展板組裝Arduino Nano
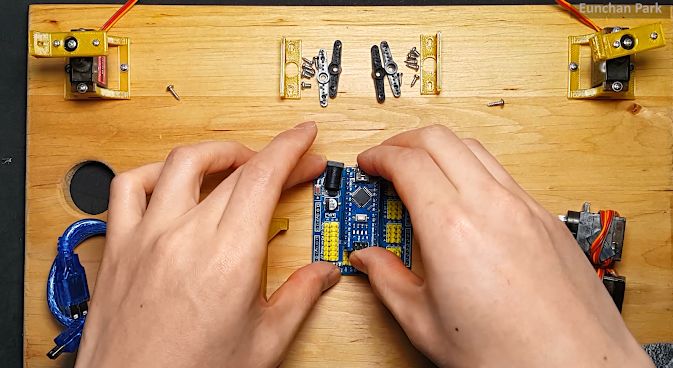
確保方向。 USB端口與DC插孔相同。
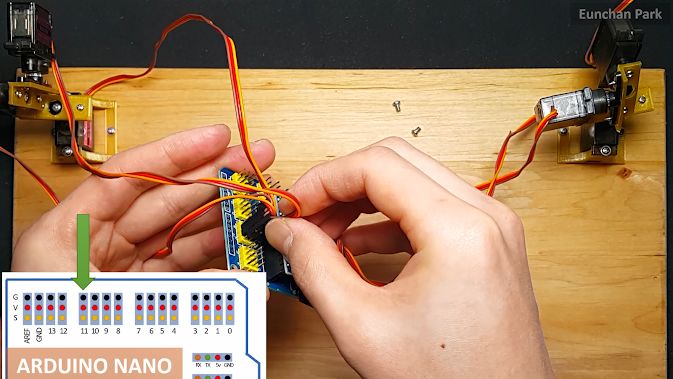
步驟17:第一層連接
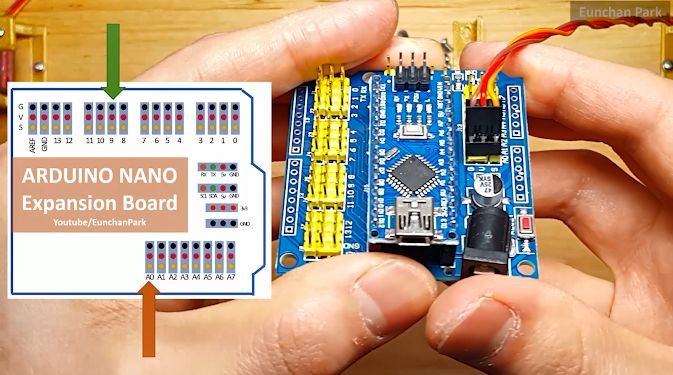
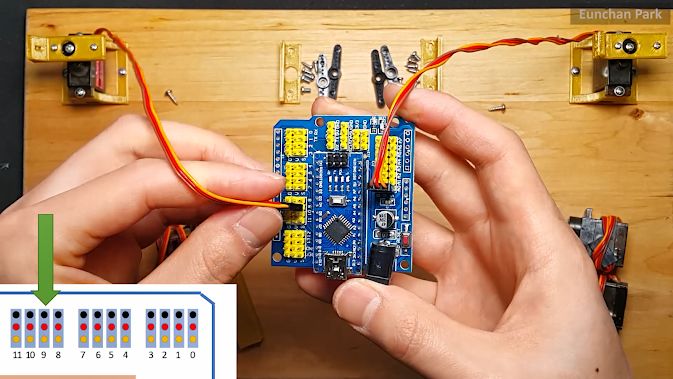
電位器與Arduino的模擬0引腳相連。你必須正確插入它。這款Arduino Nano具有8通道ADC(模擬數字轉換器)。基本上,電位計給出模擬電平或電壓。您可以使用ADC引腳讀取該電壓值
另一方面,伺服電機與Arduino的Digital 9連接。可以使用PWM(脈沖寬度調制)控制伺服電機。 Arduino Nano具有6通道PWM引腳(引腳9,10,11,3,5和6)。因此,我們最多可以使用6個伺服電機。
在此步驟中,源代碼如下所示
#include
Servo servo[6];
void setup() {
pinMode(A0, INPUT);
servo[0].attach(9);
}
int tempADC[3] = {0};
void loop() {
tempADC[0] = analogRead(A0);
servo[0].write(map(tempADC[0] , 0, 1023, 0, 180));
}
步驟18:組裝第二層

第二層也很簡單。當您將電纜插入Arduino時,需要注意的是將它放在正確的位置。
左側伺服電機與引腳10連接
右側電位器與A1連接
#include
Servo servo[6];
void setup() {
pinMode(A0, INPUT);
pinMode(A1, INPUT);
servo[0].attach(9);
servo[1].attach(10);
}
int tempADC[3] = {0};
void loop() {
tempADC[0] = analogRead(A0);
servo[0].write(map(tempADC[0] , 0, 1023, 0, 180));
tempADC[1] = analogRead(A1);
servo[1].write(map(tempADC[1], 0, 1023, 0, 180));
}
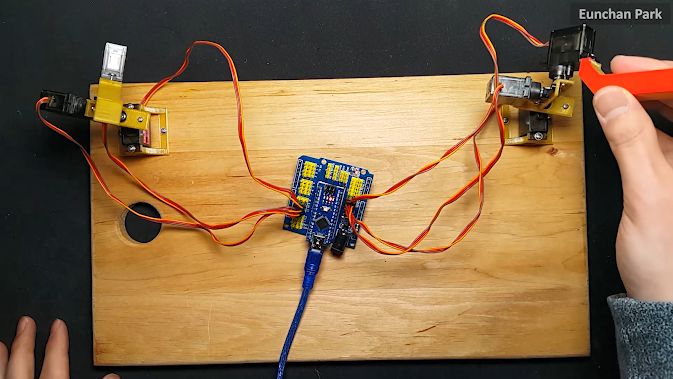
步驟19:組裝第3層幀
步驟20:組裝具有第二電機/電位計的框架
步驟21:將第三個電機組裝到關節框架中
步驟22:將電纜插入Arduino
第3電機與引腳11連接
第3電位器與A2連接
代碼如下所示
#include
Servo servo[6];
void setup() {
pinMode(A0, INPUT);
pinMode(A1, INPUT);
pinMode(A2, INPUT);
servo[0].attach(9);
servo[1].attach(10);
servo[2].attach(11);
}
int tempADC[3] = {0};
void loop() {
tempADC[0] = analogRead(A0);
servo[0].write(map(tempADC[0] , 0, 1023, 0, 180));
tempADC[1] = analogRead(A1);
servo[1].write(map(tempADC[1], 0, 1023, 0, 180));
tempADC[2] = analogRead(A2);
servo[2].write(map(tempADC[2], 0, 1023, 0, 180));
}
步驟23:組裝拇指框架
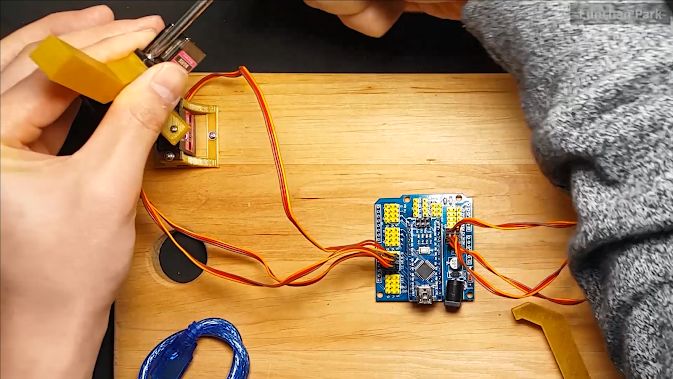
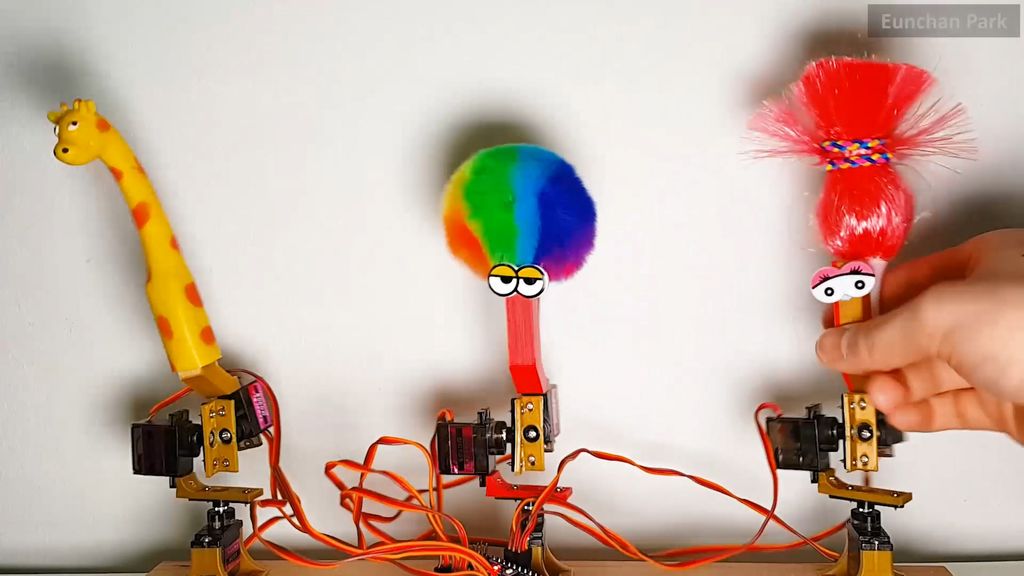
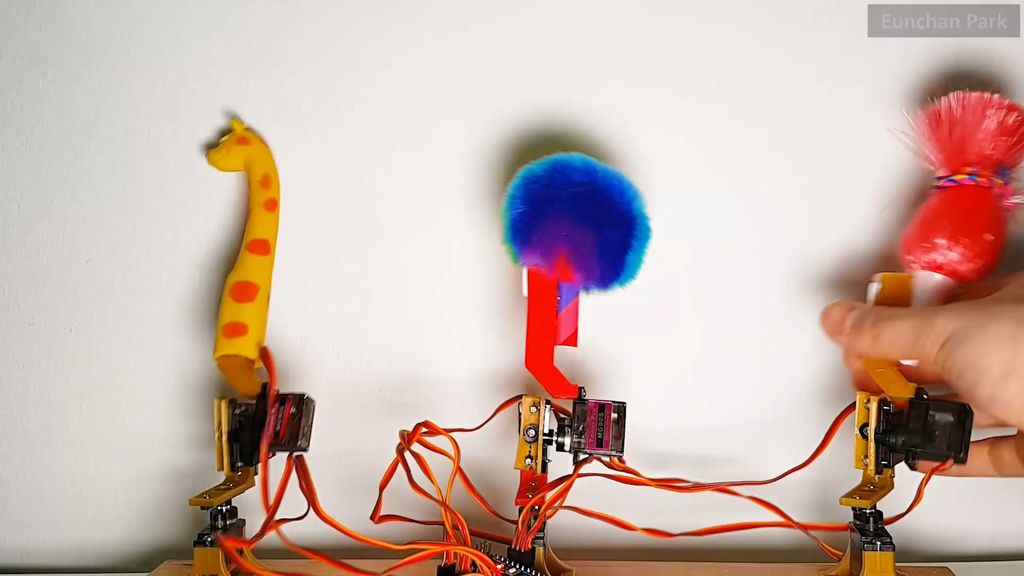
步驟24:測試和調整角度
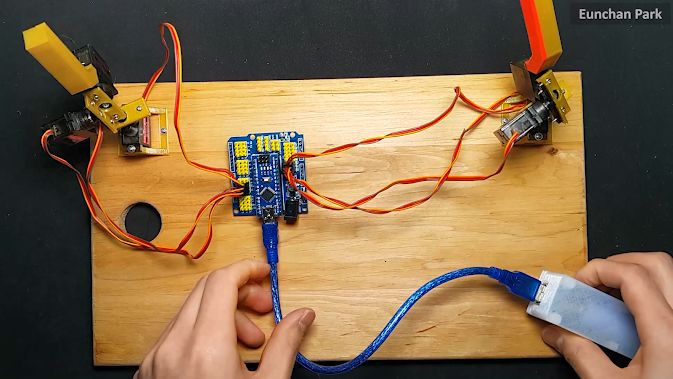
將USB線連接到任何電源,機器人很快就會開啟。角度可能略有不同。逐個調整角度。
步驟25:再多一個機器人?
如果你想要再制造一個機器人,你可以做到。將伺服器插入3,5和6.
#include
Servo servo[6];
void setup() {
pinMode(A0, INPUT);
pinMode(A1, INPUT);
pinMode(A2, INPUT);
servo[0].attach(9);
servo[1].attach(10);
servo[2].attach(11);
servo[3].attach(3);
servo[4].attach(5);
servo[5].attach(6);
}
int tempADC[3] = {0};
void loop() {
tempADC[0] = analogRead(A0);
servo[0].write(map(tempADC[0] , 0, 1023, 0, 180));
servo[3].write(map(tempADC[0] , 0, 1023, 0, 180));
tempADC[1] = analogRead(A1);
servo[1].write(map(tempADC[1], 0, 1023, 0, 180));
servo[4].write(map(tempADC[1], 0, 1023, 0, 180));
tempADC[2] = analogRead(A2);
servo[2].write(map(tempADC[2], 0, 1023, 0, 180));
servo[5].write(map(tempADC[2], 0, 1023, 0, 180));
}
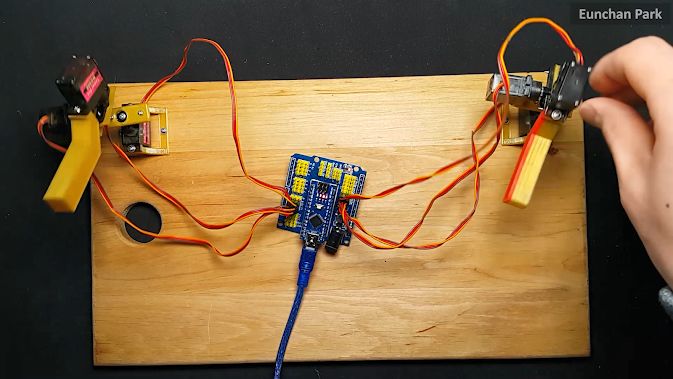
步驟26:完成!
-
機器人
+關注
關注
213文章
29463瀏覽量
211520 -
Arduino
+關注
關注
188文章
6490瀏覽量
190075
發布評論請先 登錄





 工商網監
工商網監
評論