") 水位監(jiān)測(cè)器的制作教程
水位監(jiān)測(cè)器的制作教程

第1步:所需的工具和材料



















材料:
Arduino R3 - 1沒(méi)有
水箱 - 2沒(méi)有
蜂鳴器-1否
超聲波傳感器 - 2沒(méi)有
16x2 LCD顯示-1否
塑料盒-2沒(méi)有
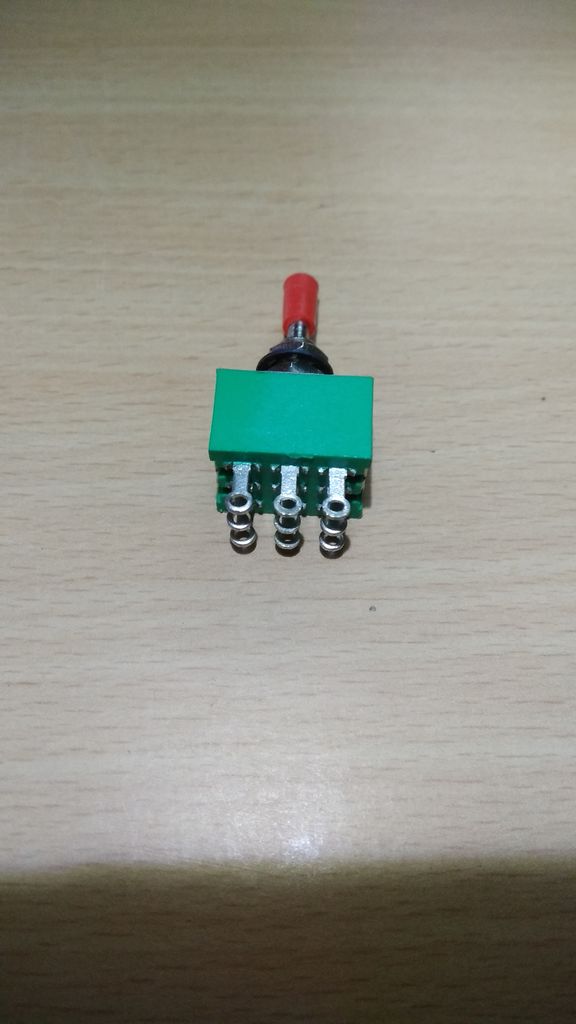
撥動(dòng)開關(guān)-1否
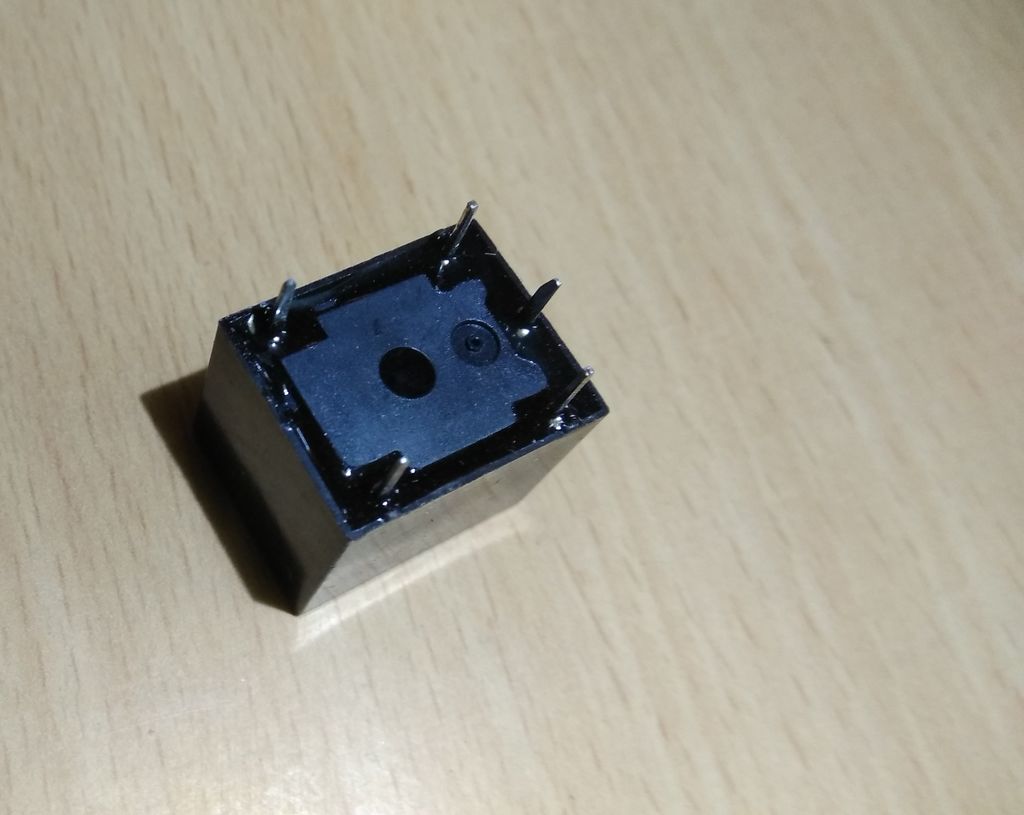
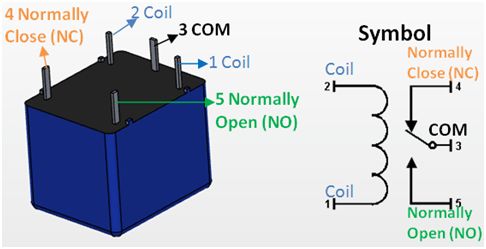
繼電器6v/5A -1否
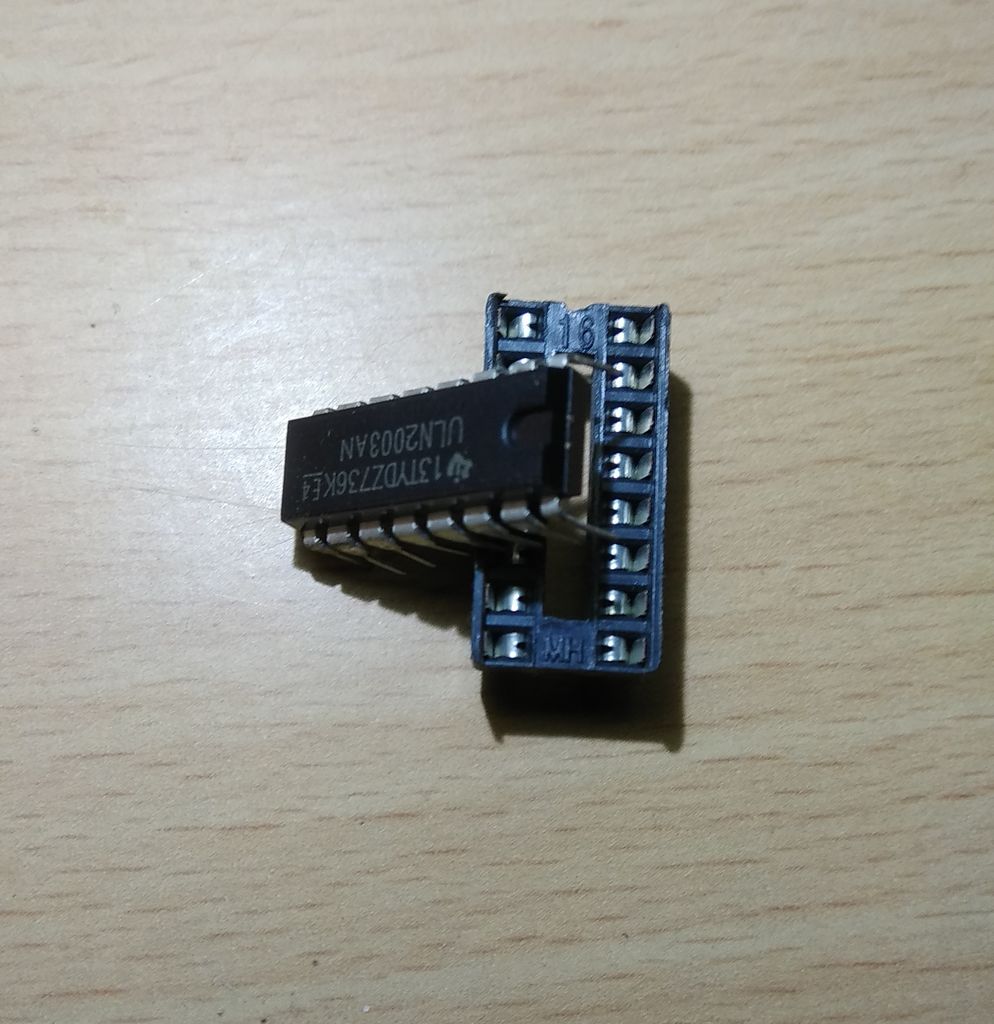
IC ULN2003,基座-1否
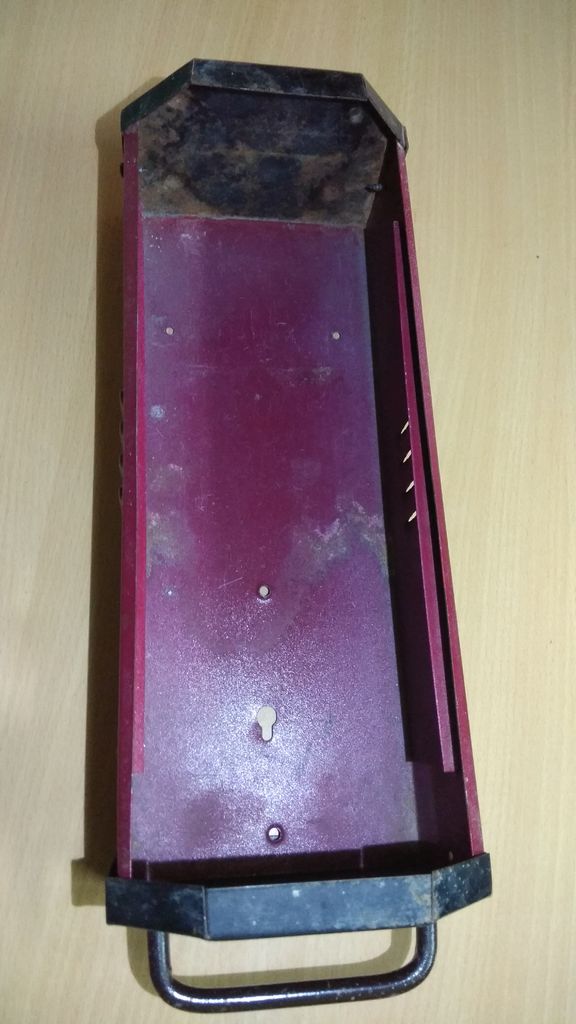
舊燈箱 - 1沒(méi)有
LED(紅色,黃色,綠色) - 每個(gè)2沒(méi)有
帶狀線 - 按要求長(zhǎng)度
6v或12v適配器-1否
通用PCB - 所需尺寸
電阻-220 ohm
螺絲-20沒(méi)有
塑料板 - 按要求尺寸
可變電阻器 - 10 k ohm
連接線 - 根據(jù)需要
工具:
剝線鉗 - 1沒(méi)有
剪線鉗-1否
焊接套件-1否
熱膠槍-1否
第2步:電路圖:
在這個(gè)電路圖中,我使用了3個(gè)單獨(dú)的撥動(dòng)開關(guān)來(lái)切換兩個(gè)傳感器,但是真正的單個(gè)傳感器是可用的,這就夠了。
第3步:程序:
程序:
#include
#define led 13
#define led2 12
#define led3 11
#define led4 10
#define led5 9
#define led6 8
#define trigger 18
#define echo 19
#define motor 17
#define buzzer 16
LiquidCrystal lcd(2,3,4,5,6,7);
浮動(dòng)時(shí)間= 0,距離= 0;
int temp = 0;
void setup()
{
lcd.begin(16,2);
Serial.begin(9600);
pinMode(觸發(fā)器,OUTPUT);
pinMode(echo,INPUT);
pinMode(motor,OUTPUT);
pinMode(蜂鳴器,OUTPUT);
pinMode(led,OUTPUT);
pinMode (led2,OUTPUT);
pinMode(led3,OUTPUT);
pinMode(led4,OUTPUT);
pinMode(led5,OUTPUT);
pinMode(led6,OUTPUT);
lcd.print(“水位”);
lcd.setCursor(0,1);
lcd.print(“b Indicator”);
delay(2000);
}
void loop()
{
lcd.clear();
digitalWrite(觸發(fā)器,LOW);
delayMicroseconds(2);
digitalWrite(觸發(fā)器,HIGH);
delayMicroseconds(10);
digitalWrite(觸發(fā)器,LOW);
delayMicroseconds(2);
time = pulseIn(echo,HIGH);
距離=時(shí)間* 340/20000;
lcd.clear();
lcd.print(“水空間”);
lcd.setCursor(0,1);
lcd.print(“坦克是:”);
lcd.print(距離);
lcd.print(“Cm”);
延遲(2000);
if(distance 《= 78)
{
digitalWrite(led,HIGH);
}
其他
{
digitalWrite(led,LOW);
}
if(distance 《65)
{
digitalWrite(led2,HIGH);
}
其他
{
digitalWrite(led2,LOW);
}
if(distance 《52)
{
digitalWrite(led3,HIGH);
}
其他
{
digitalWrite(led3,LOW);
}
if(distance 《45)
{
digitalWrite(led4,HIGH);
}
其他
{
digitalWrite(led4,LOW);
}
if(distance 《28)
{
digitalWrite(led5,HIGH);
}
其他
{
digitalWrite(led5,LOW);
}
if(distance 《15)
{
digitalWrite(led6,HIGH);
}
其他
{
digitalWrite(led6,LOW);
}
if(distance 《15 && temp == 0)
{
digitalWrite(motor,LOW);
digitalWrite(蜂鳴器,HIGH);
lcd.clear();
lcd.print(“水箱滿”);
lcd.setCursor(0,1);
lcd.print(“電機(jī)關(guān)閉”);
延遲(3000);
digitalWrite(蜂鳴器,LOW);
延遲(3000);
temp = 1;
}
否則if(距離《15 && temp == 1)
{
digitalWrite(motor,LOW);
lcd.clear();
lcd.print(“水箱滿”);
lcd.setCursor(0,1);
lcd.print(“電機(jī)關(guān)閉”);
延遲(5000);
}
否則if(distance》 70)
{
digitalWrite(motor,HIGH);
lcd.clear();
lcd.print(“低水位”);
lcd.setCursor(0,1);
lcd.print(“Motor Turned ON”);
延遲(5000);
temp = 0;
}
}
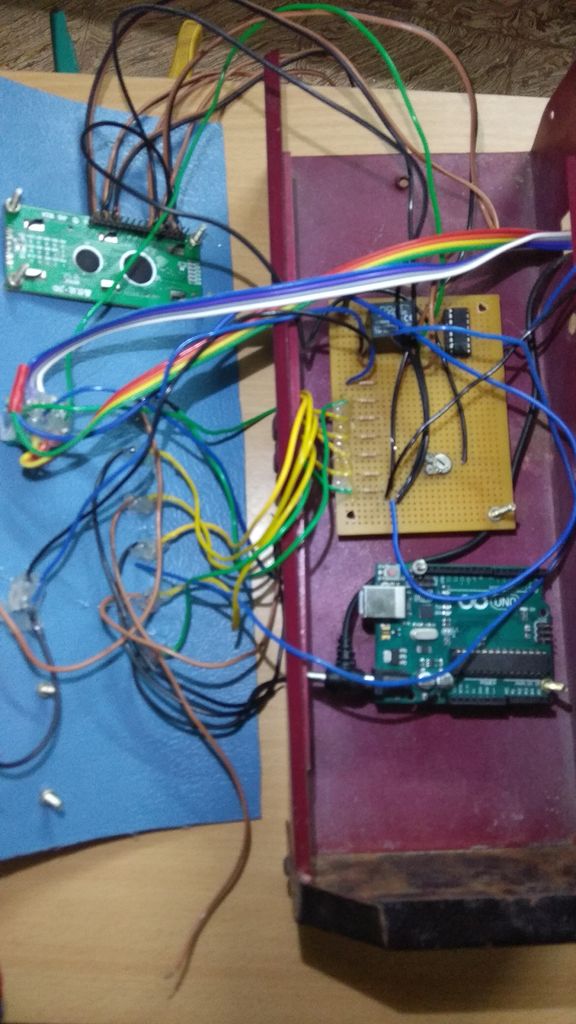
第4步:在面包板上試用
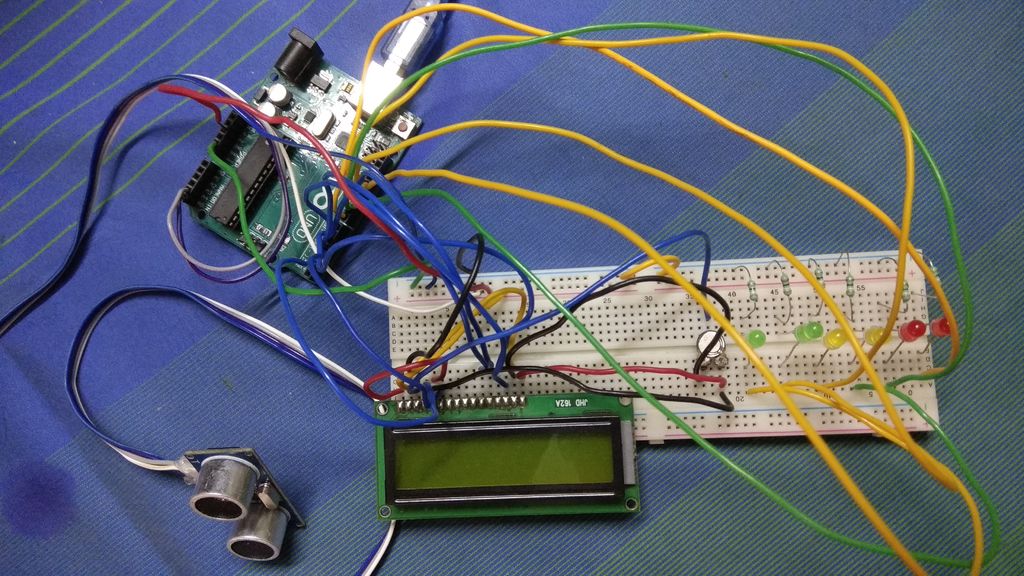
按照電路圖進(jìn)行連接并將程序下載到arduino板檢查輸出
步驟5:剪切塑料片
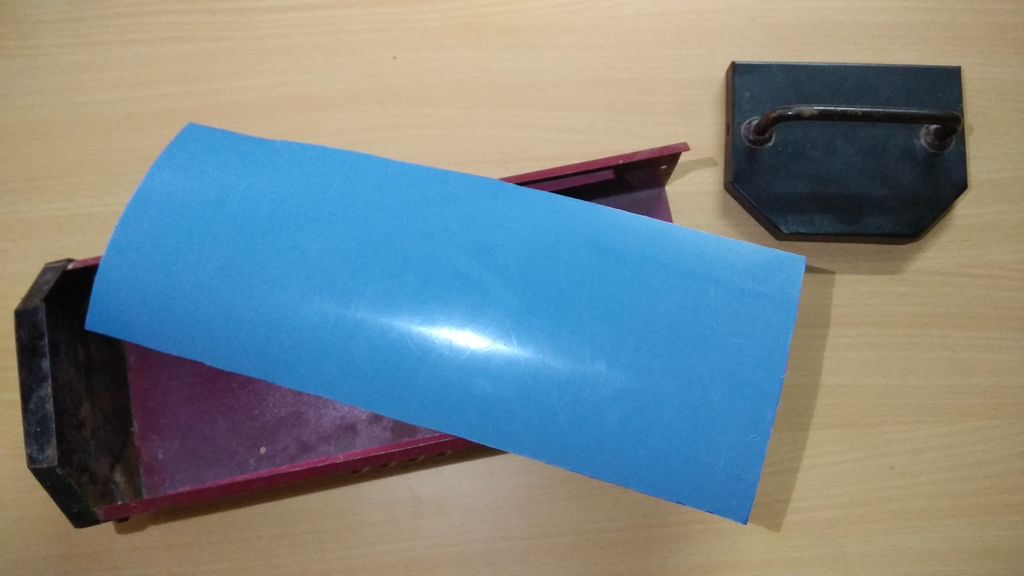






現(xiàn)在拿塑料薄膜切割成舊的燈箱。..。..請(qǐng)參考附件中的圖像
步驟6:制作一個(gè)洞



只需將arduino和pcb板放置在理想位置然后將其標(biāo)記為固定并打孔。..。..
步驟7:準(zhǔn)備LCD顯示器


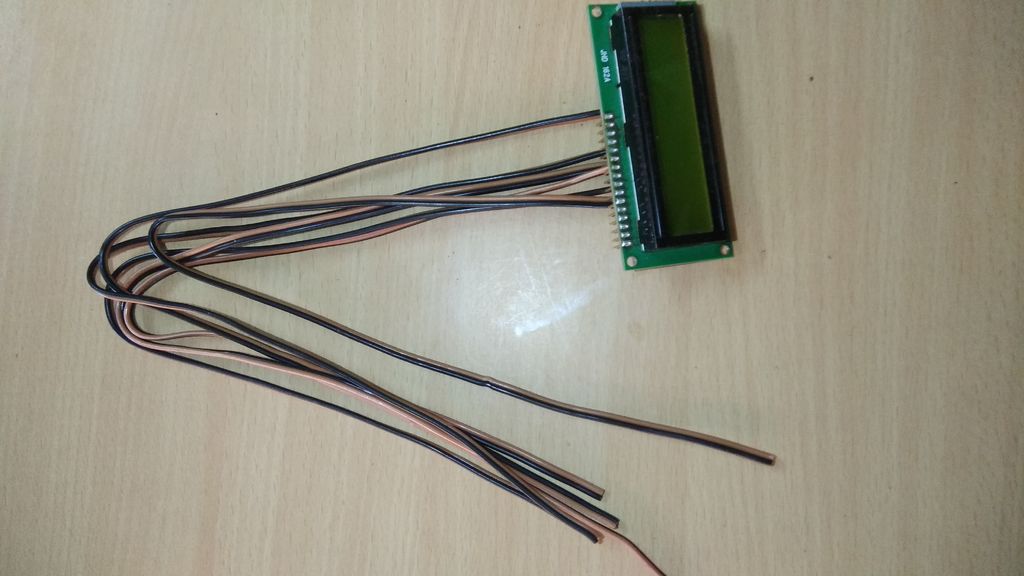
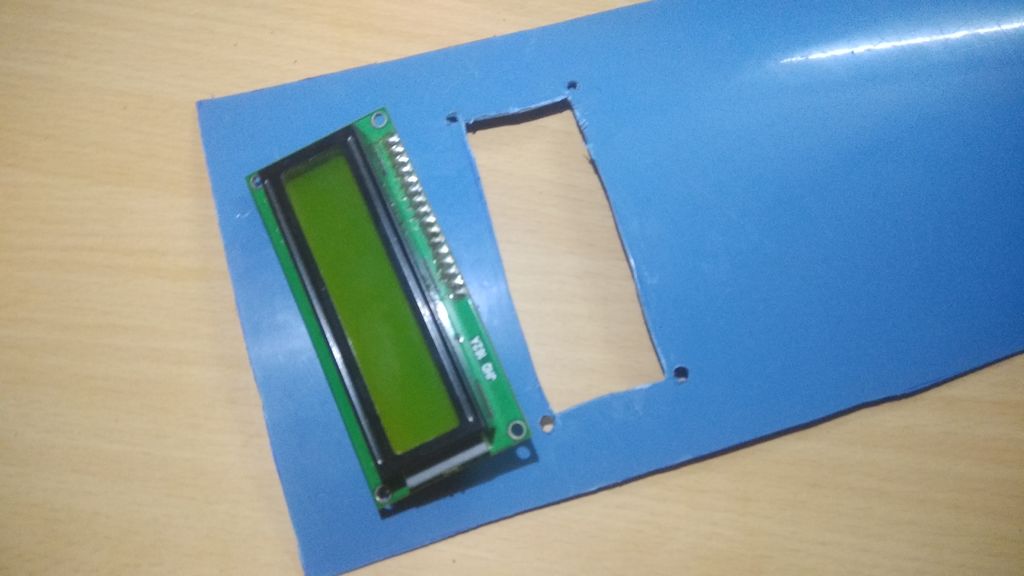
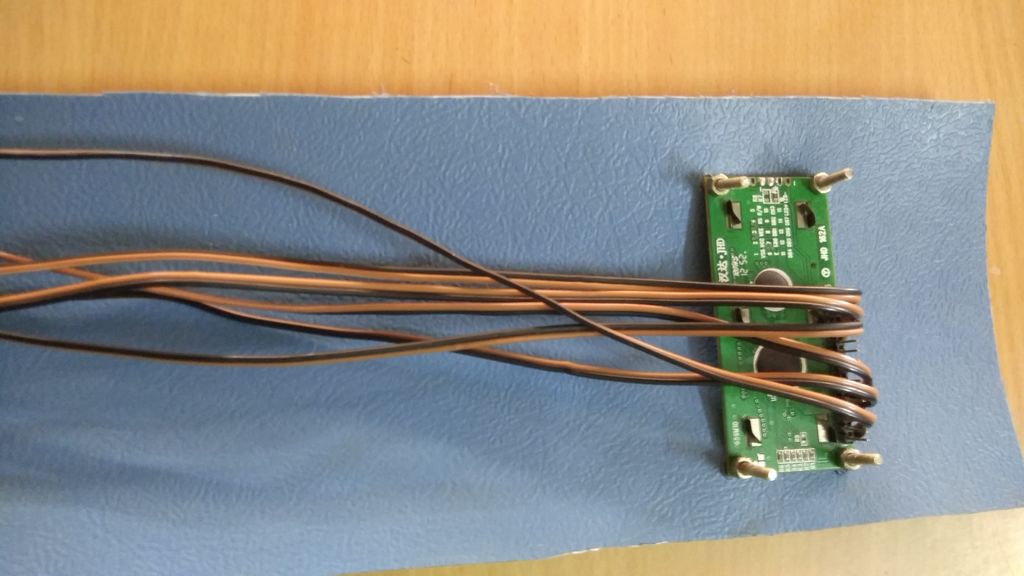
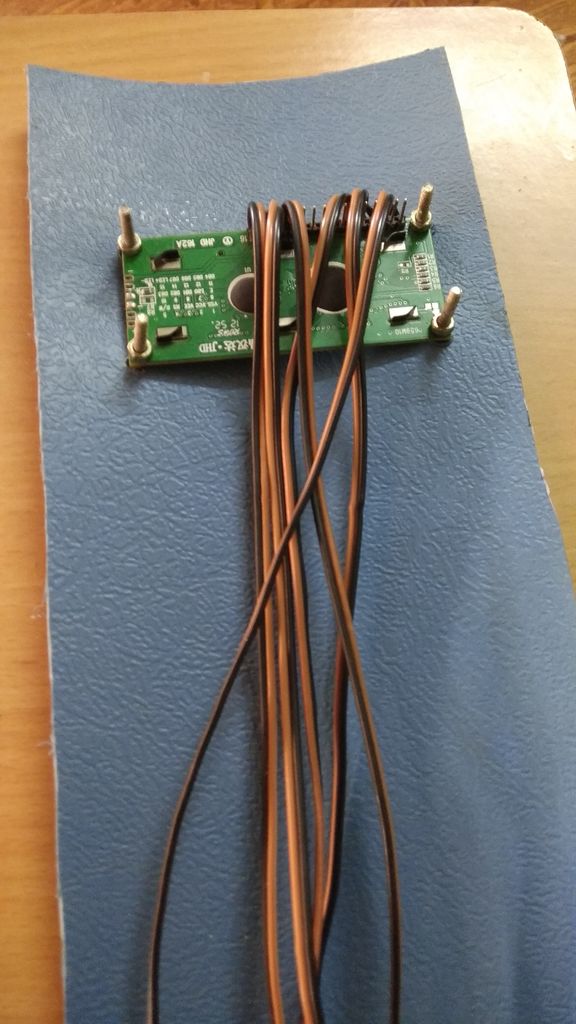
取一些電線并將其焊接LCD顯示器針腳并在塑料片上留出空間并將其放在塑料片上
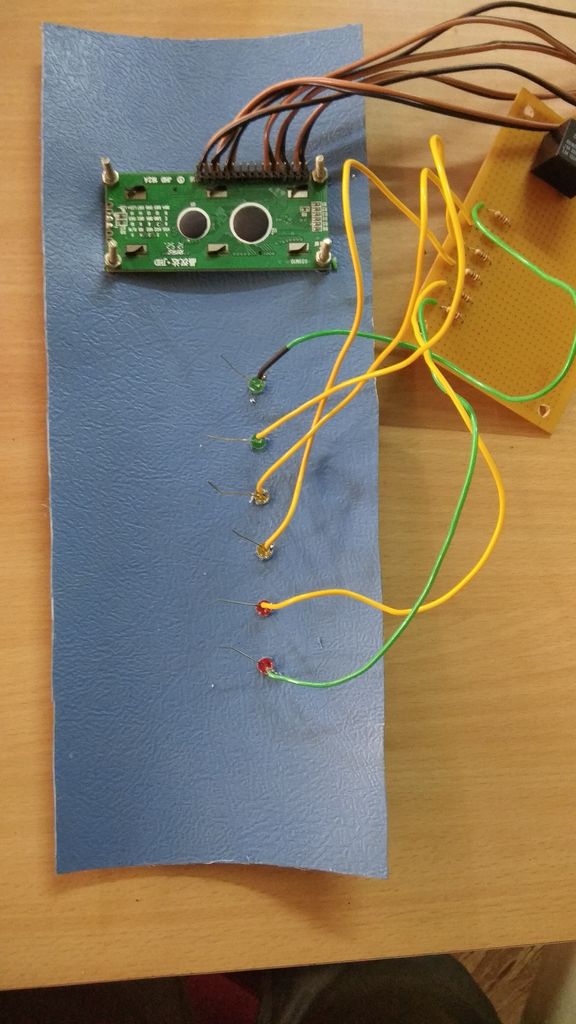
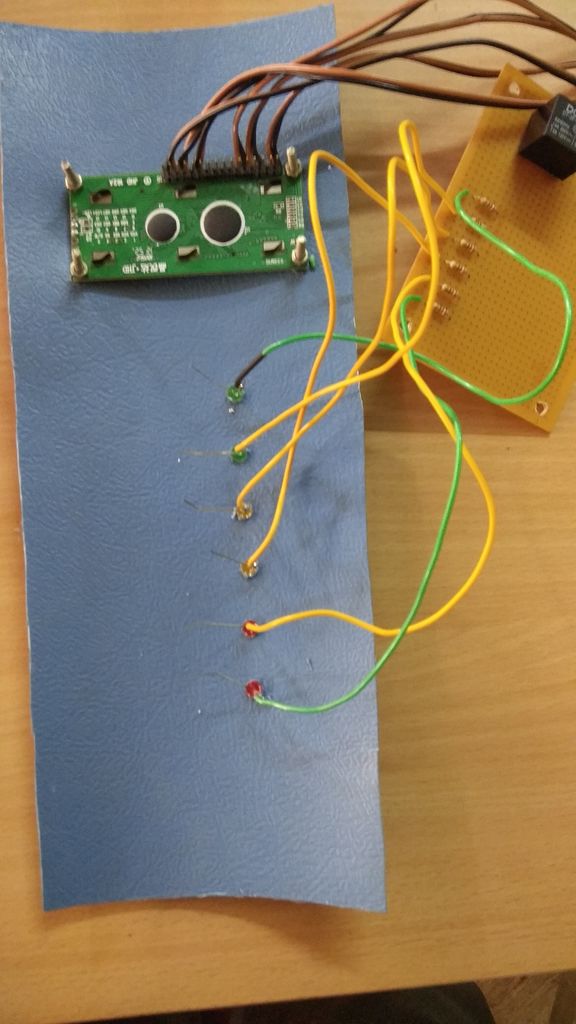
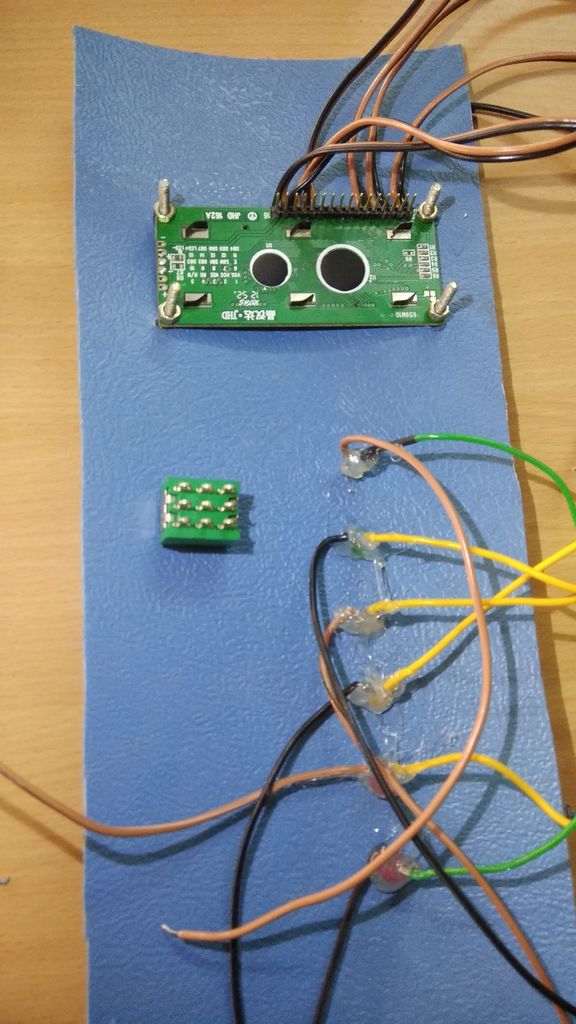
步驟8:放置T PCB上的HE組件
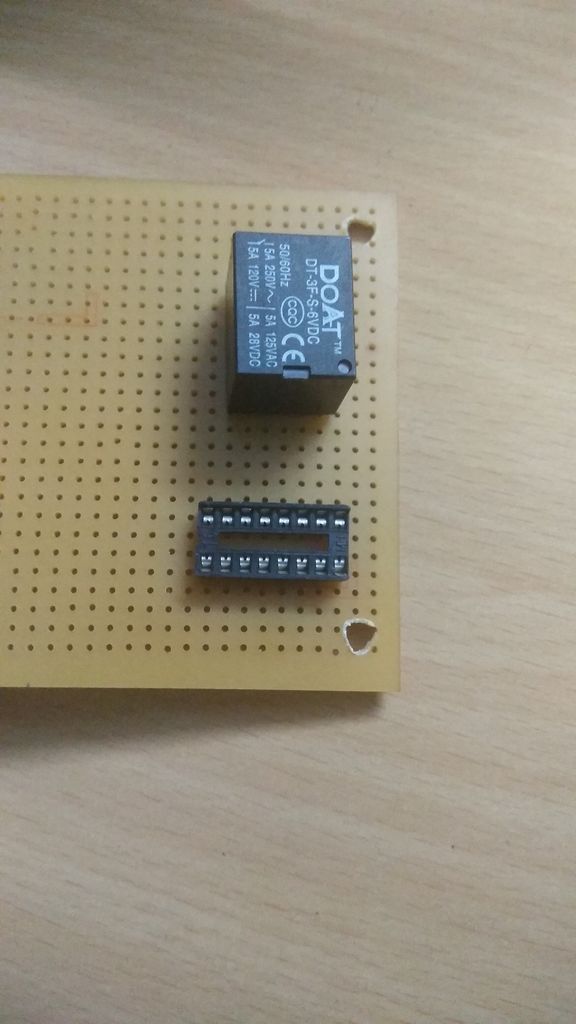

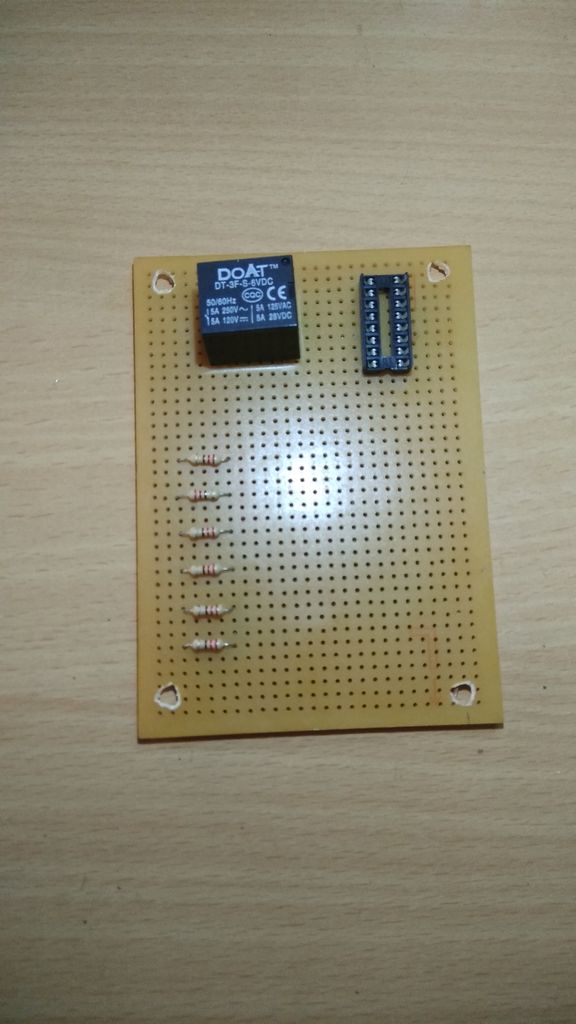
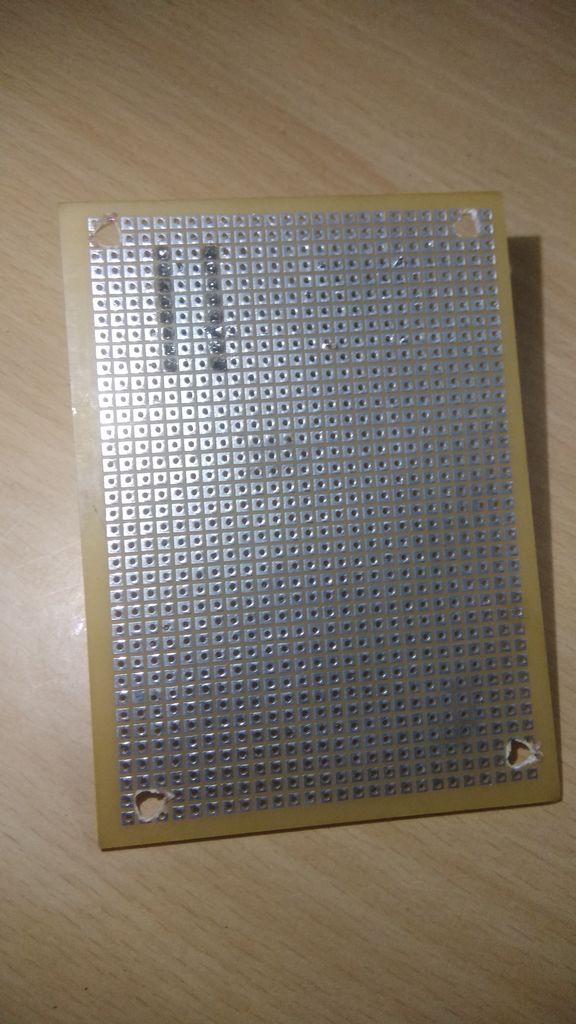
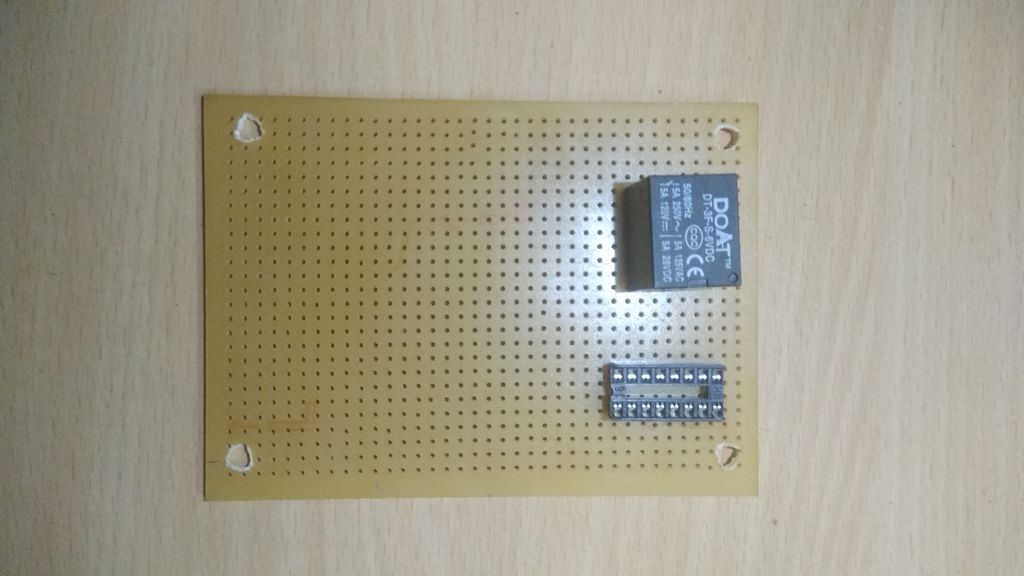
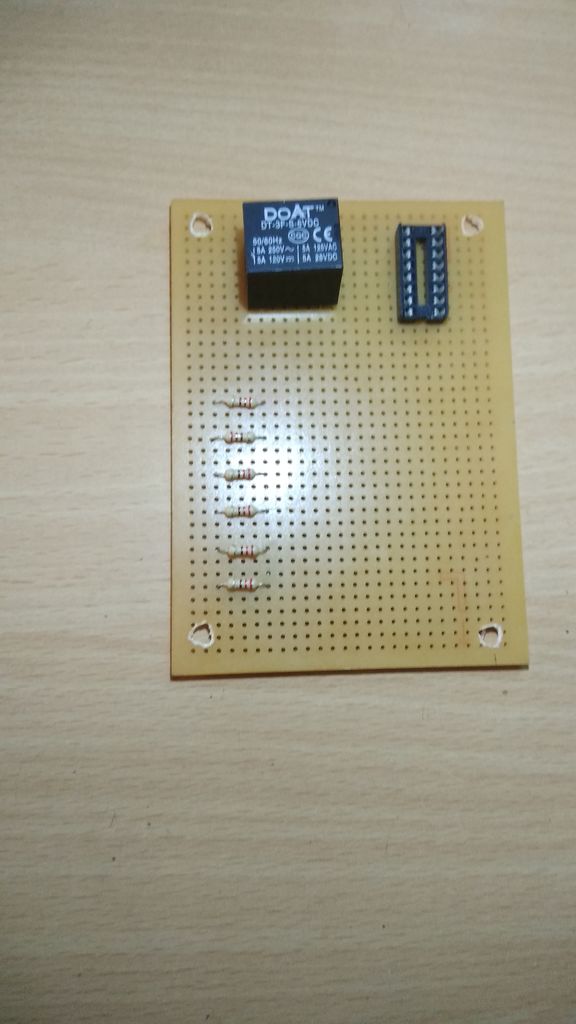

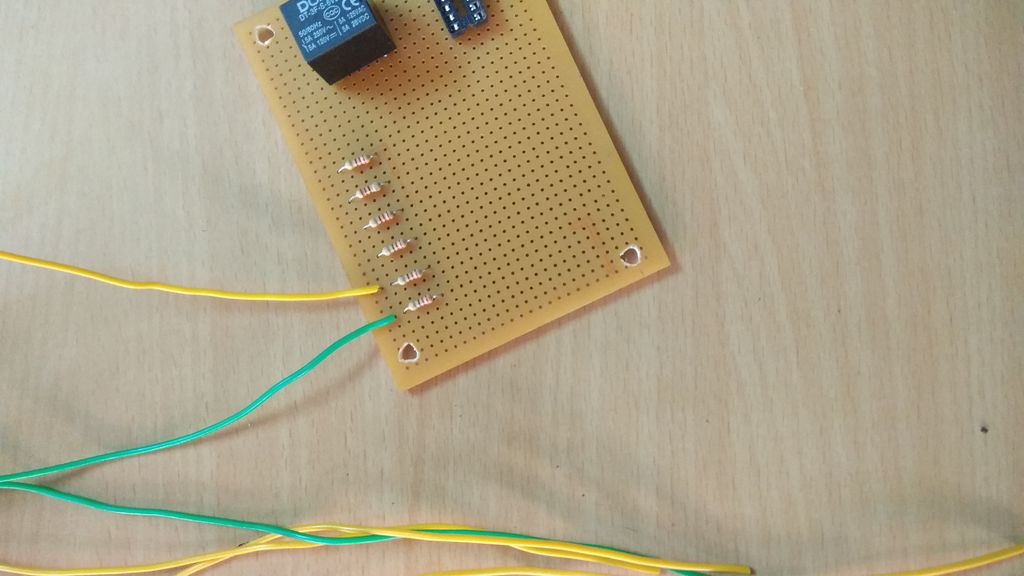
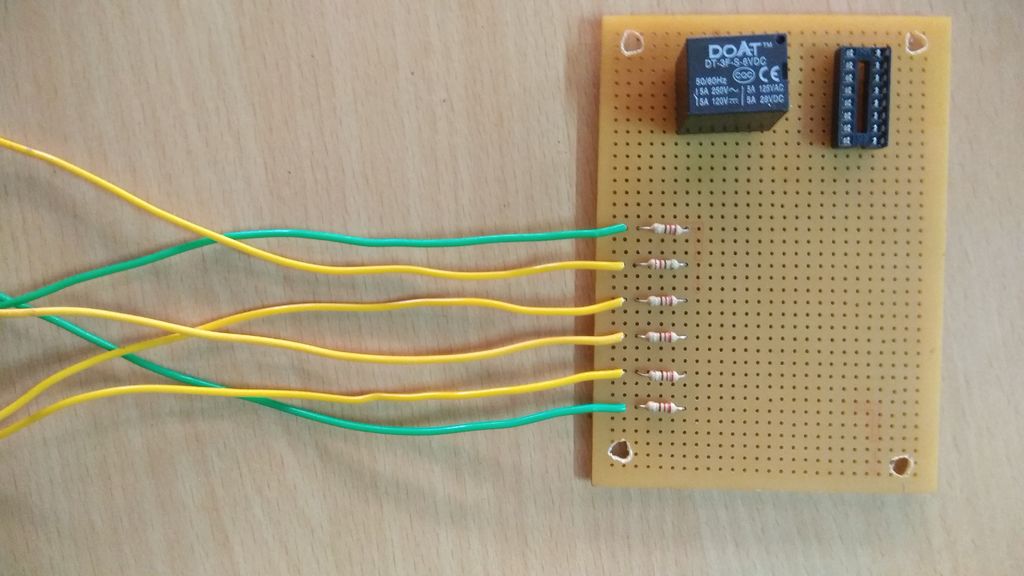
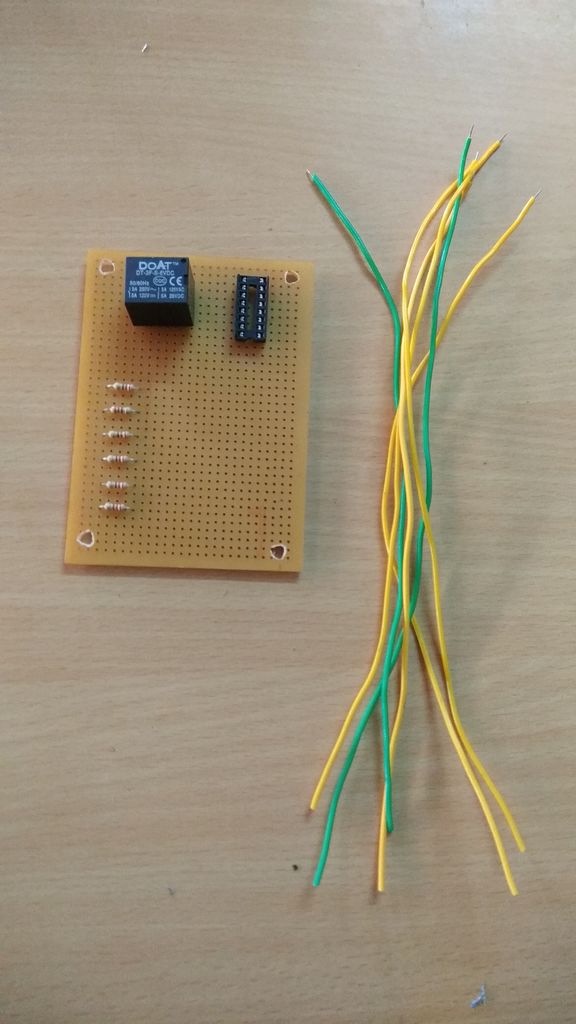
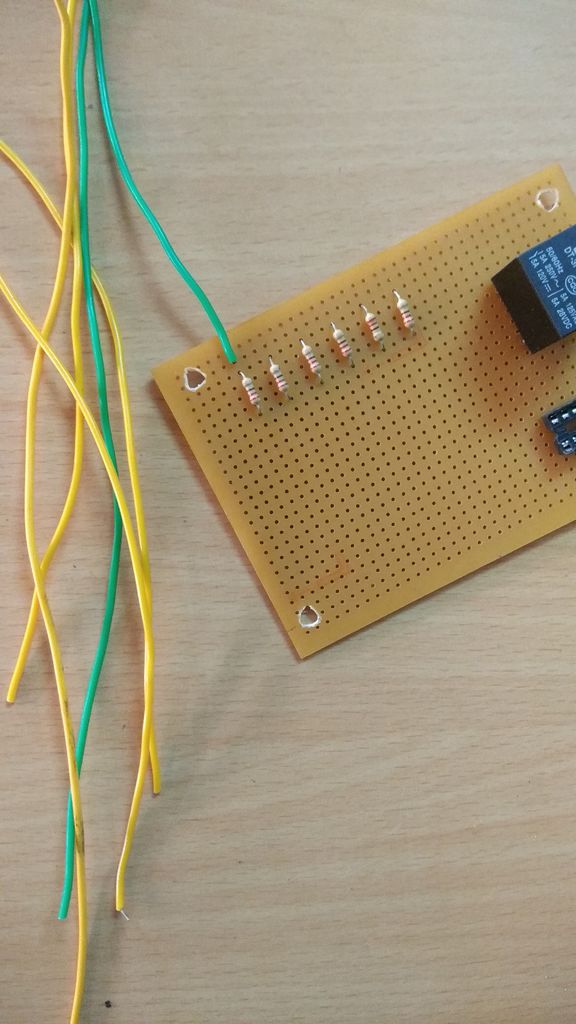
現(xiàn)在我們將把元件放在PCB上并焊接它并連接一些電線連接LED的
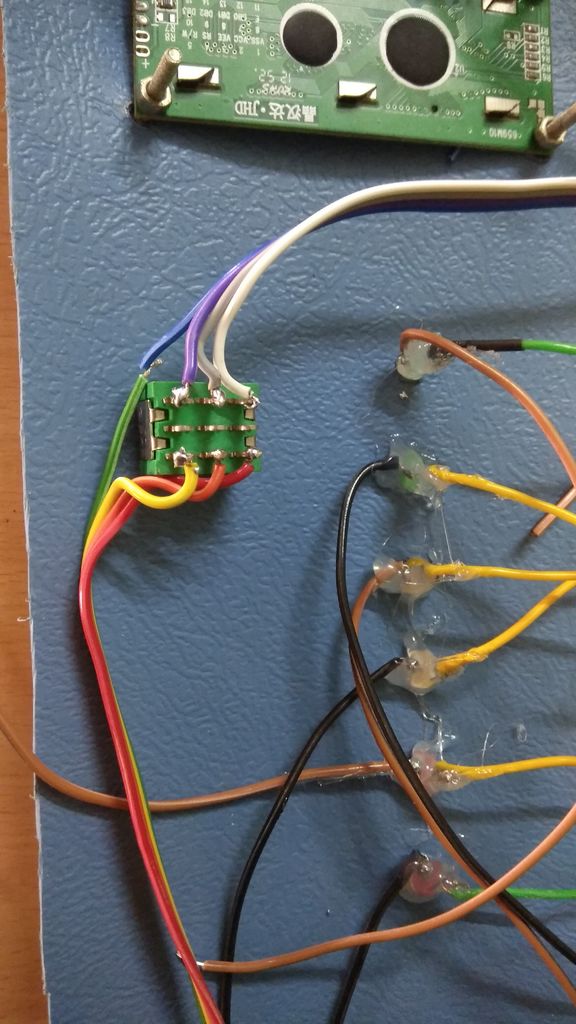
步驟9:LED的固定和連接

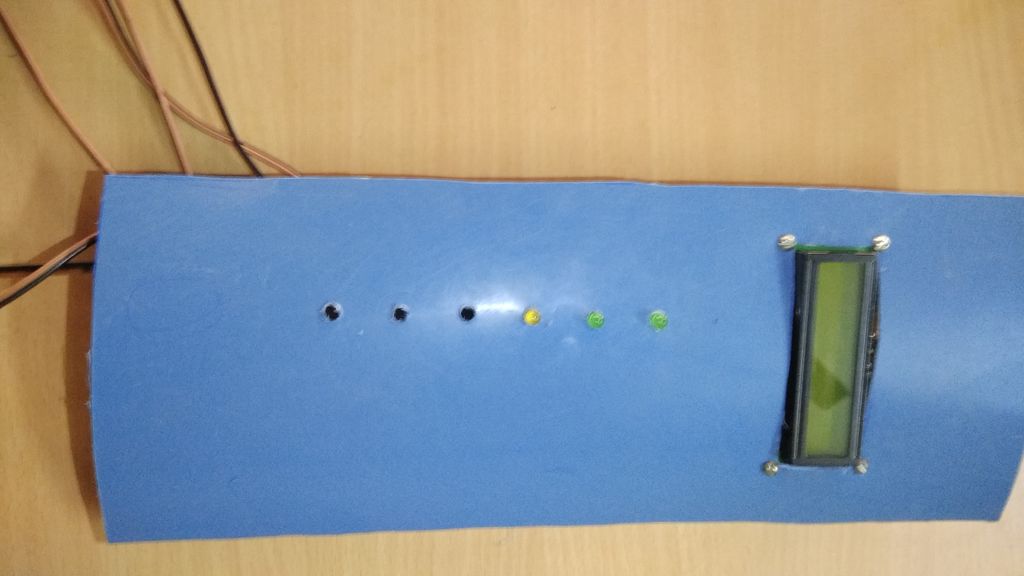

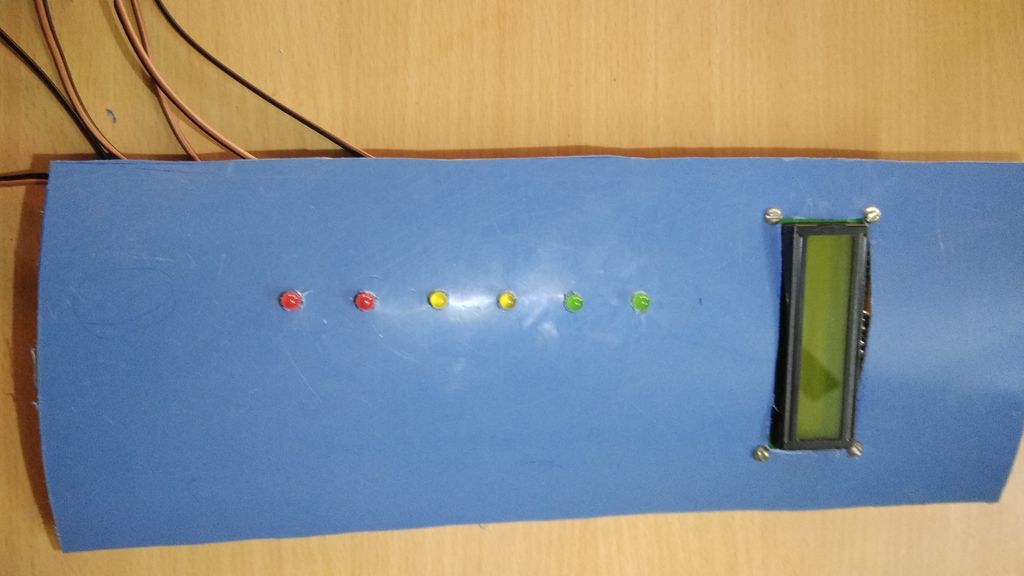
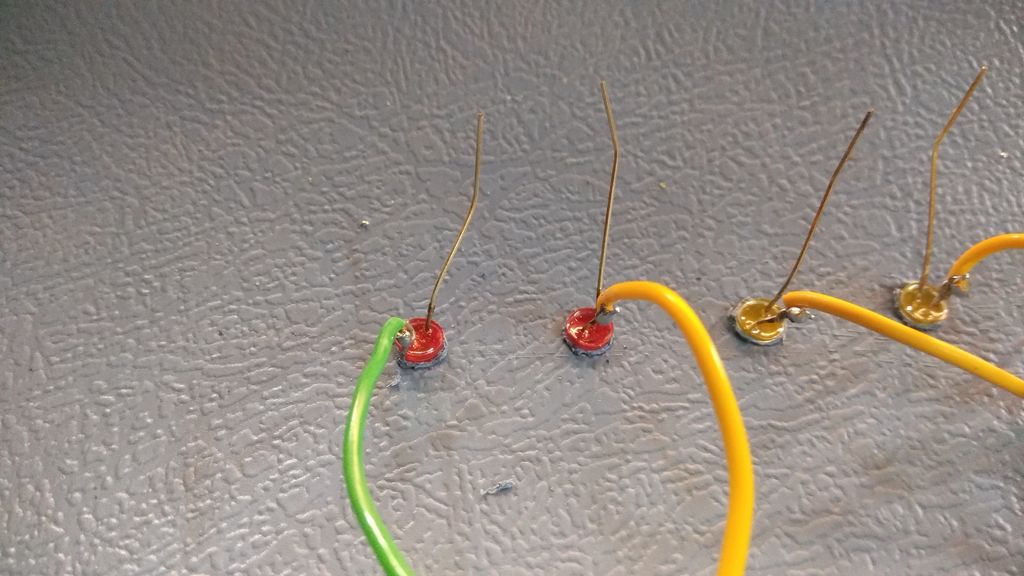
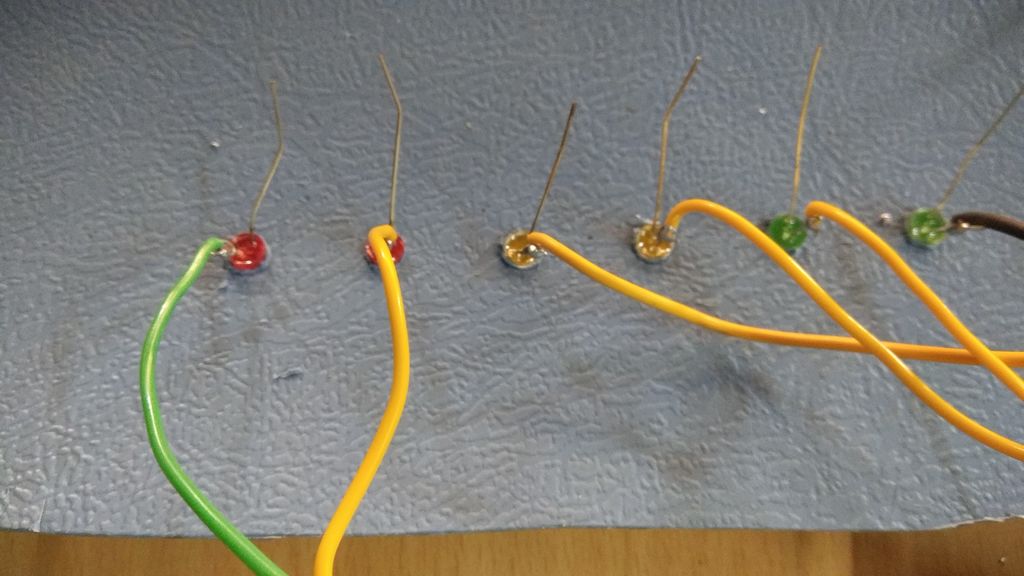
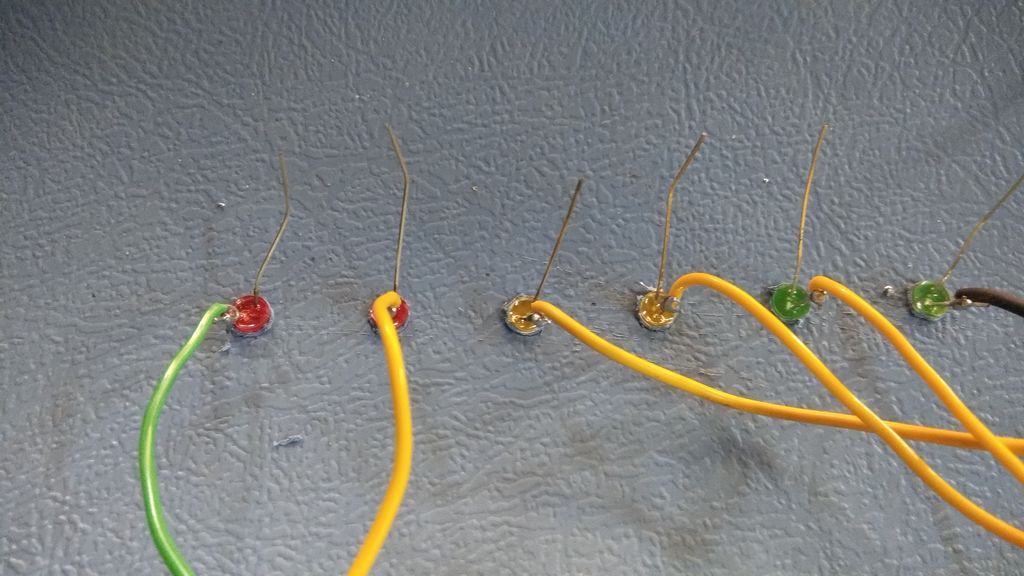
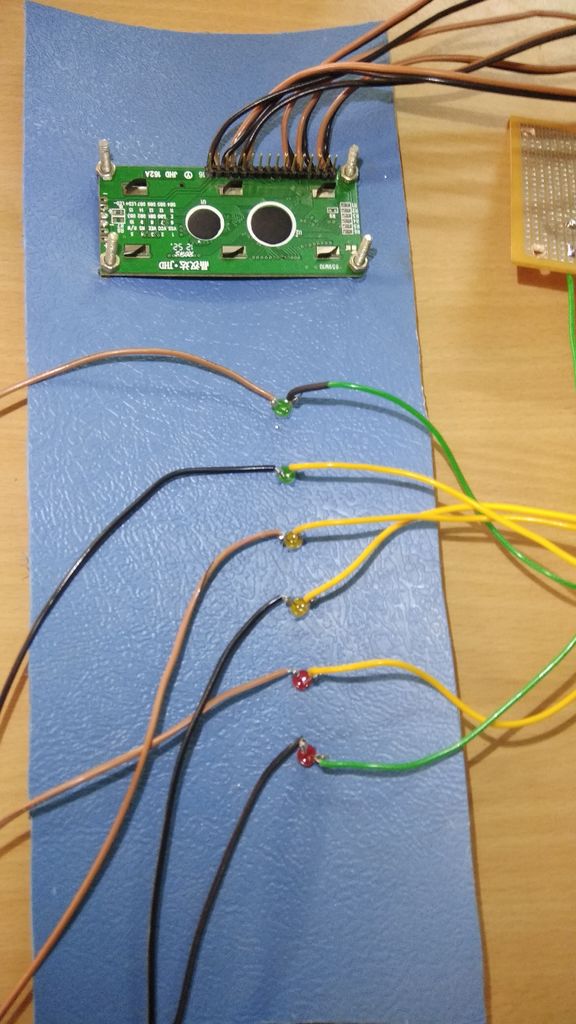
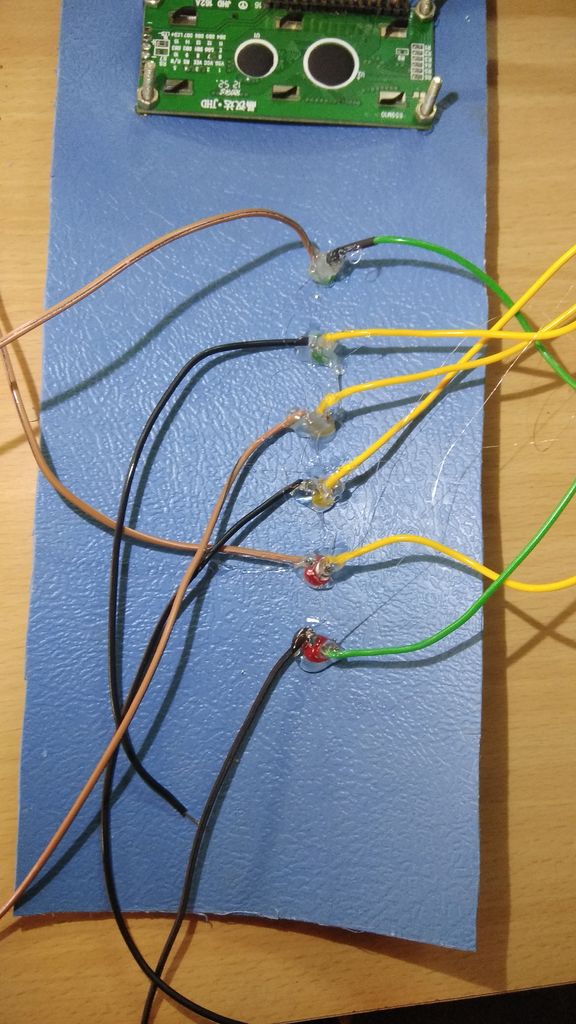
然后制作一個(gè)完美尺寸的孔以適合LED,然后根據(jù)電路圖連接它們。
步驟10:TOGGLE SWITCH
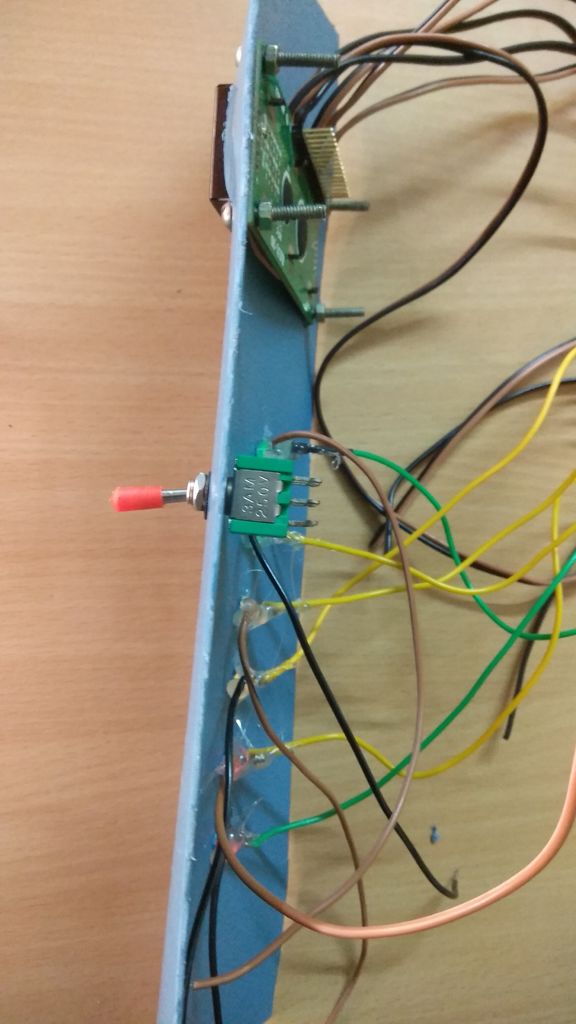
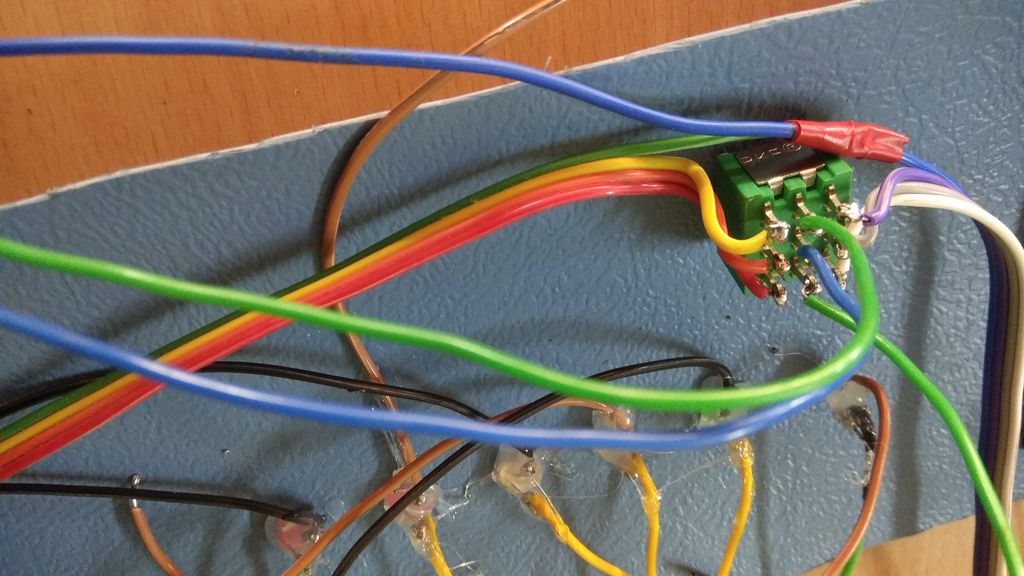
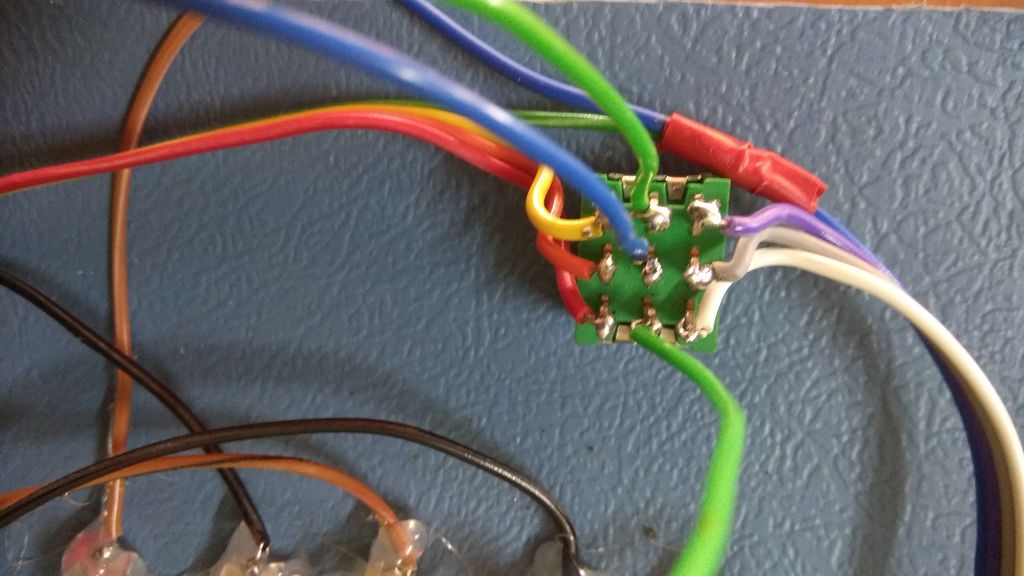
我們?cè)谶@里要修復(fù)該塑料片上的撥動(dòng)開關(guān)并按照電路圖進(jìn)行連接。
步驟11:BUZZER

只需在工作表上修復(fù)蜂鳴器并建立連接。..
步驟12:放置ARDUINO



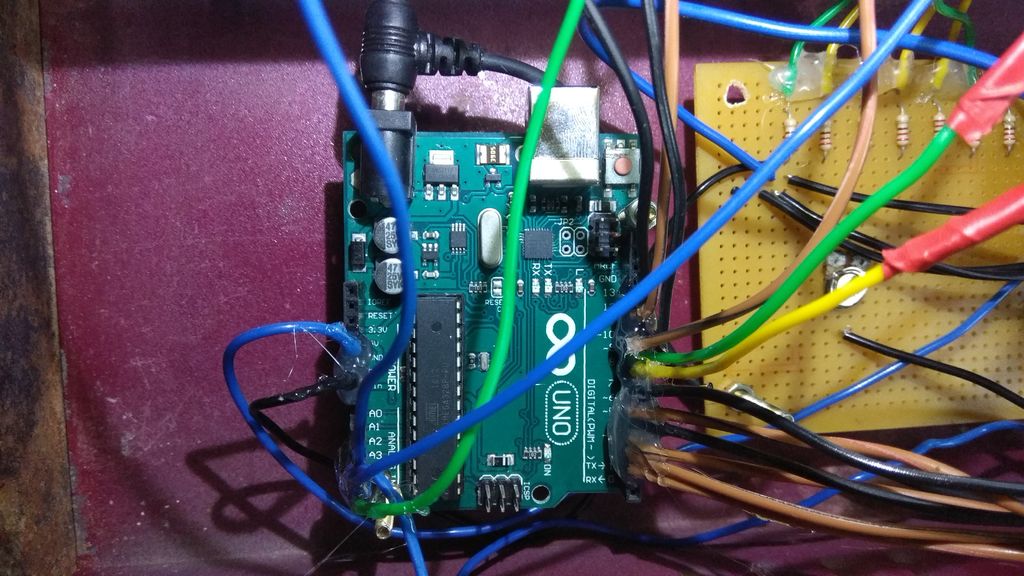


現(xiàn)在放置arduino并根據(jù)電路圖提供連接以獲取更多詳細(xì)信息,請(qǐng)參閱附件圖片
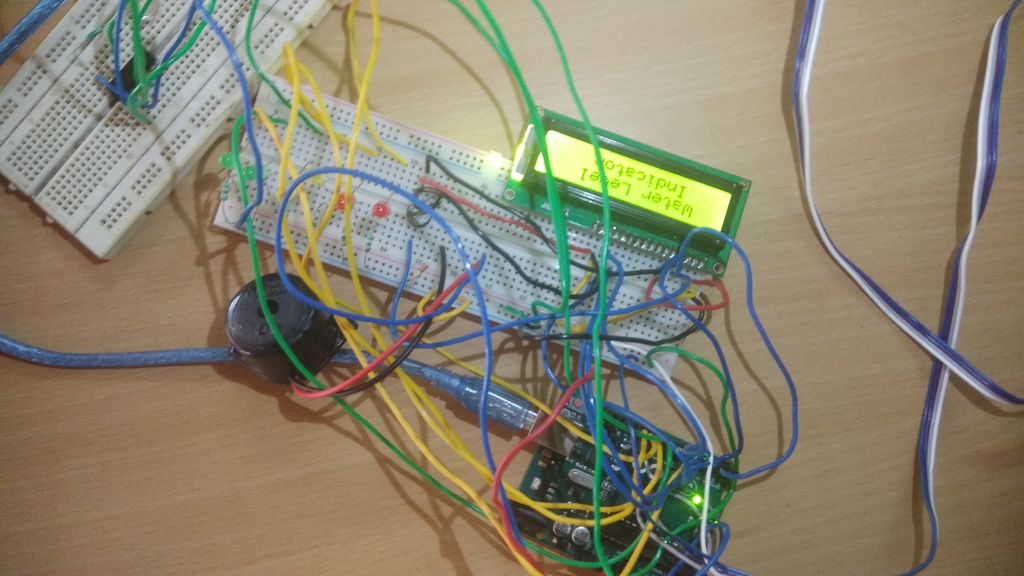
步驟13:小測(cè)試



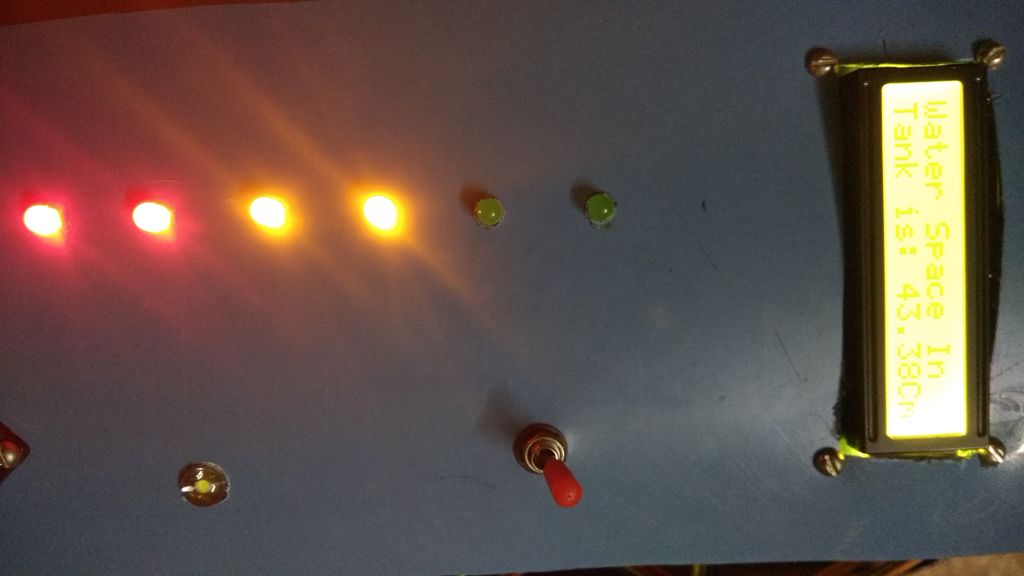





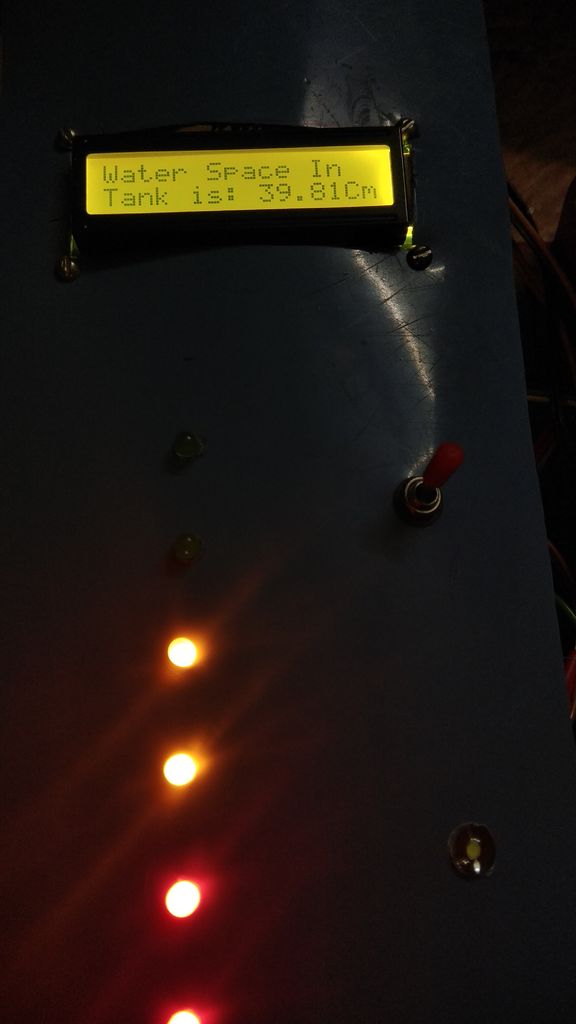
現(xiàn)在打開并測(cè)試通過(guò)提升超聲波傳感器輸出
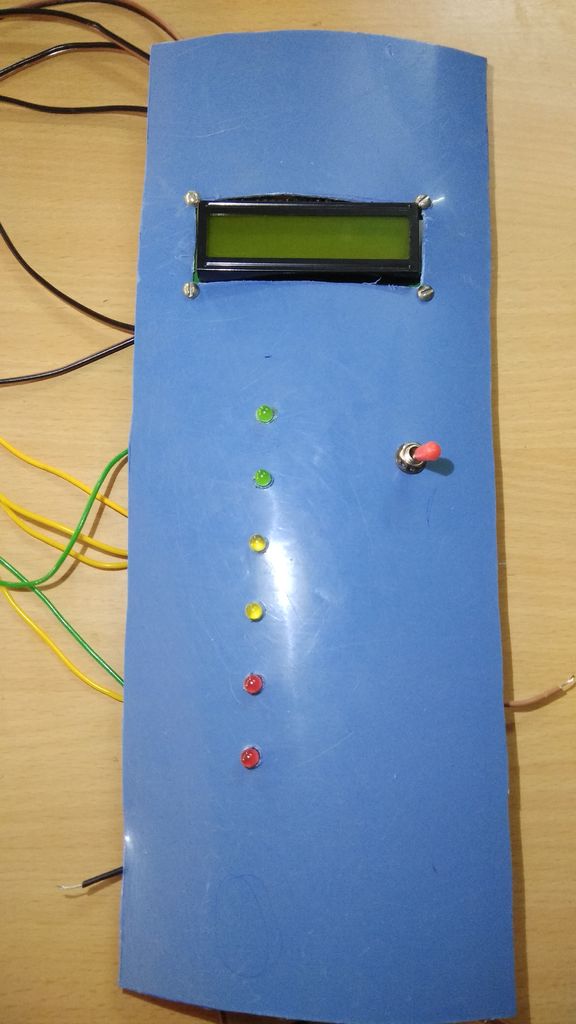
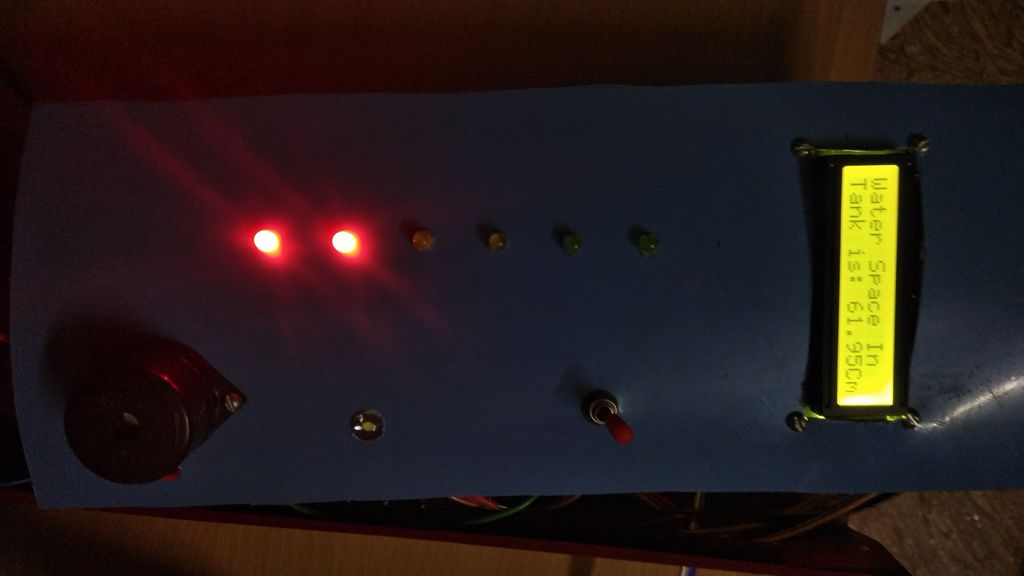
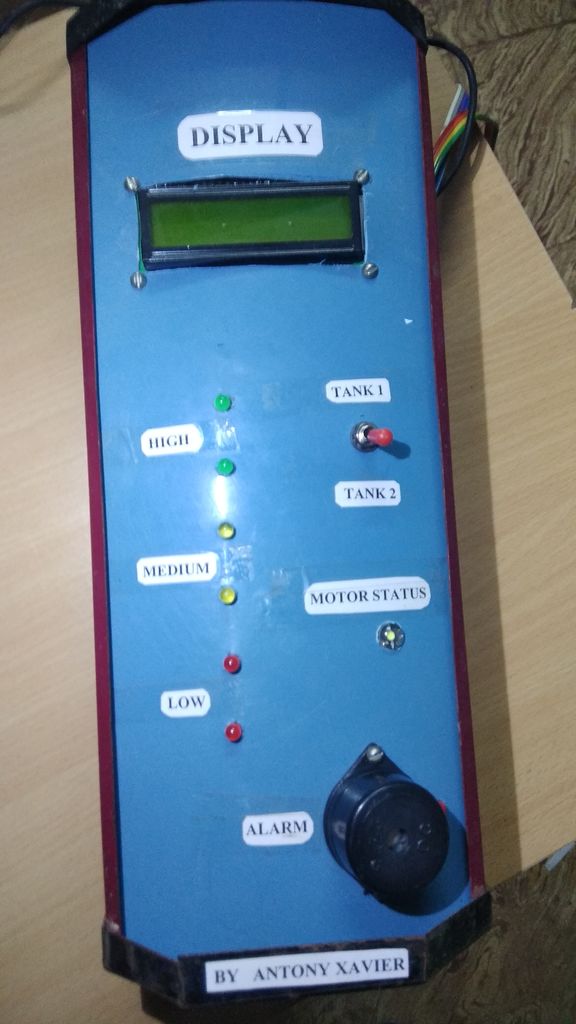
步驟14:關(guān)閉盒子




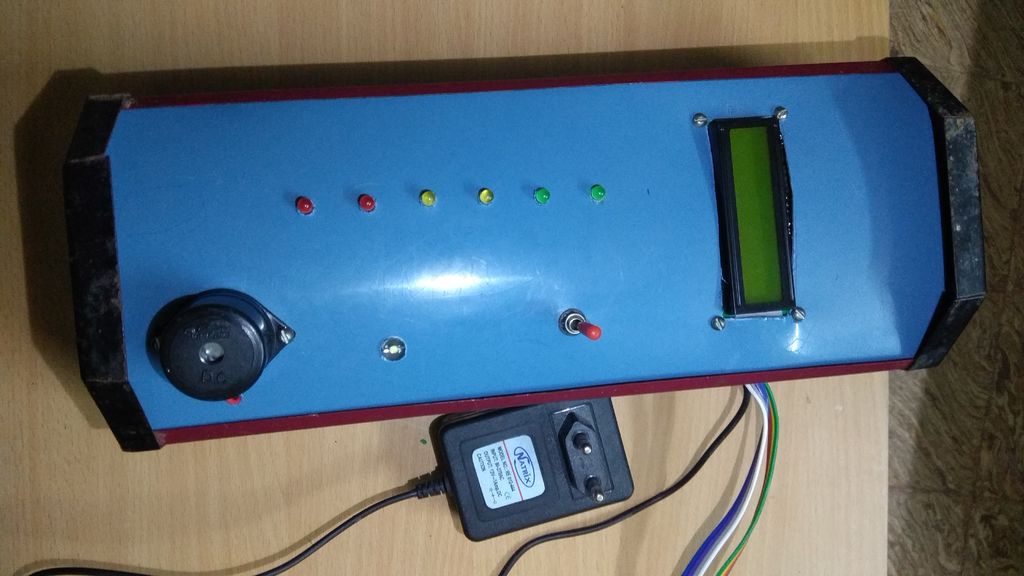






在這里,我們將修復(fù)所有內(nèi)容并關(guān)閉它。..。
步驟15:超聲波SENOR



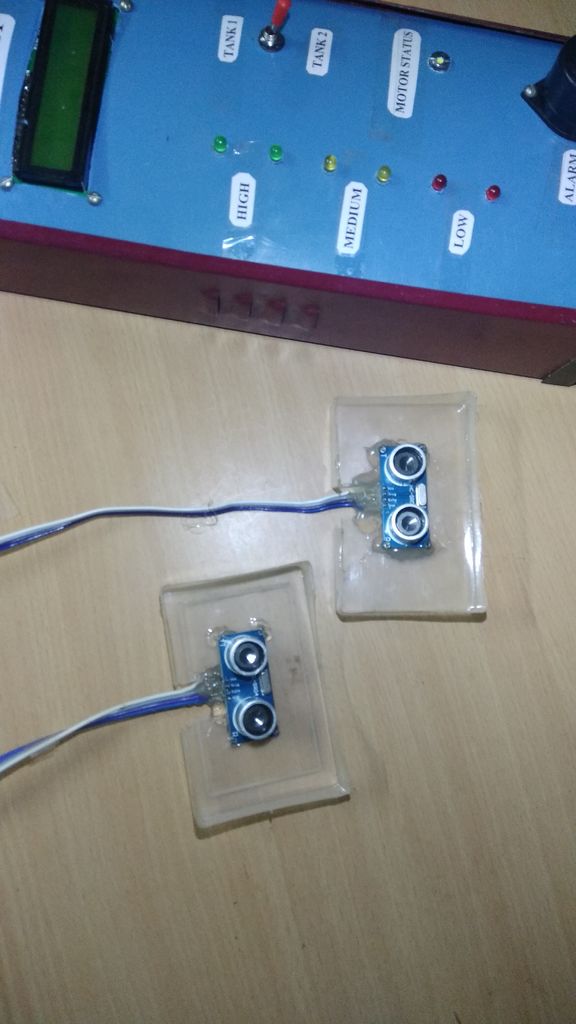
然后將傳感器固定在盒子上,如圖所示
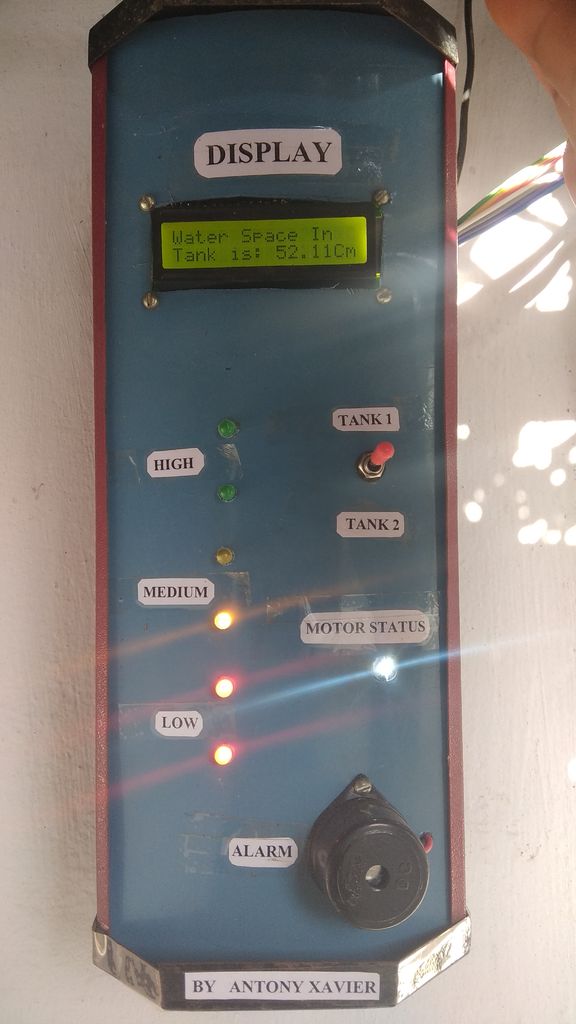
步驟16:貼紙S
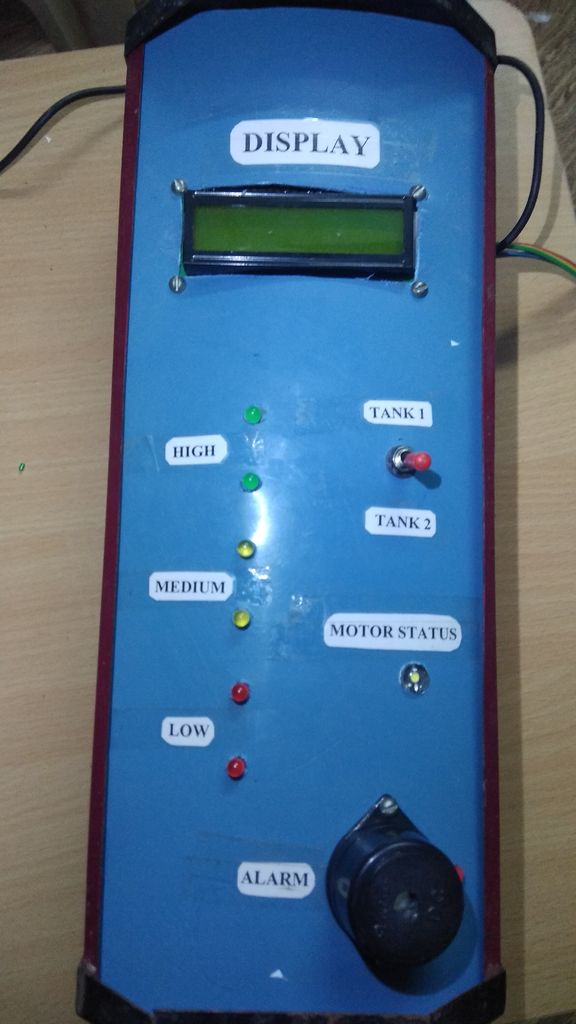


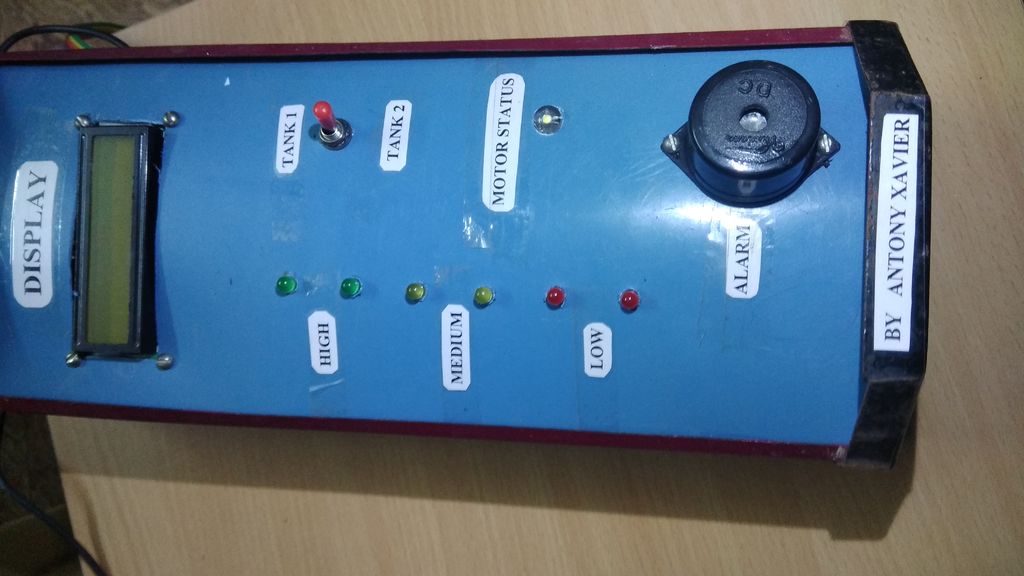
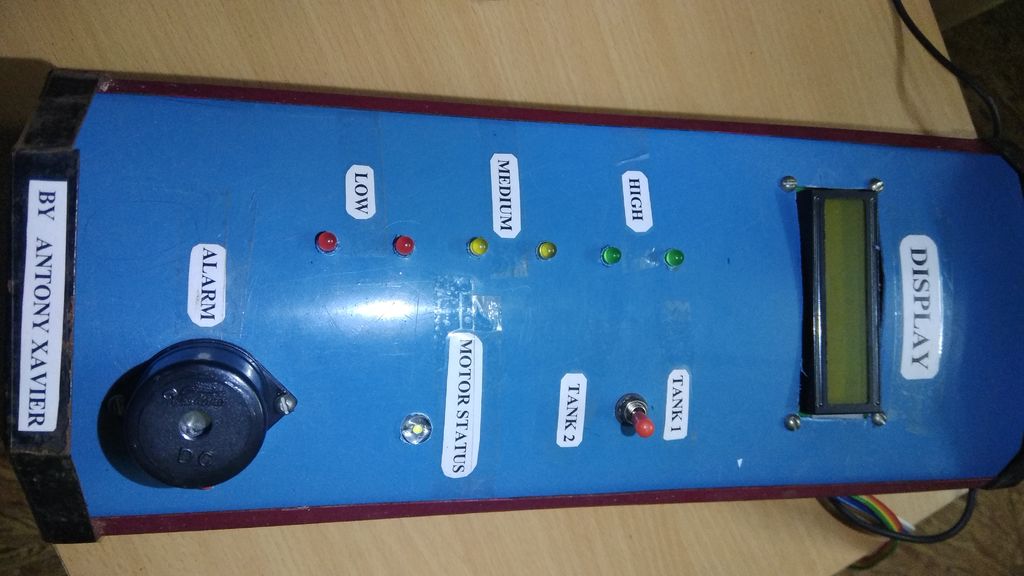


在word文檔中鍵入低,高中,顯示,坦克1,坦克2,電機(jī)狀態(tài),警報(bào)等字母。..。.然后打印輸出并將其固定在那些地方。..。
步驟17:在水箱上放置傳感器









只需參考圖像并放置這些傳感器。/p》
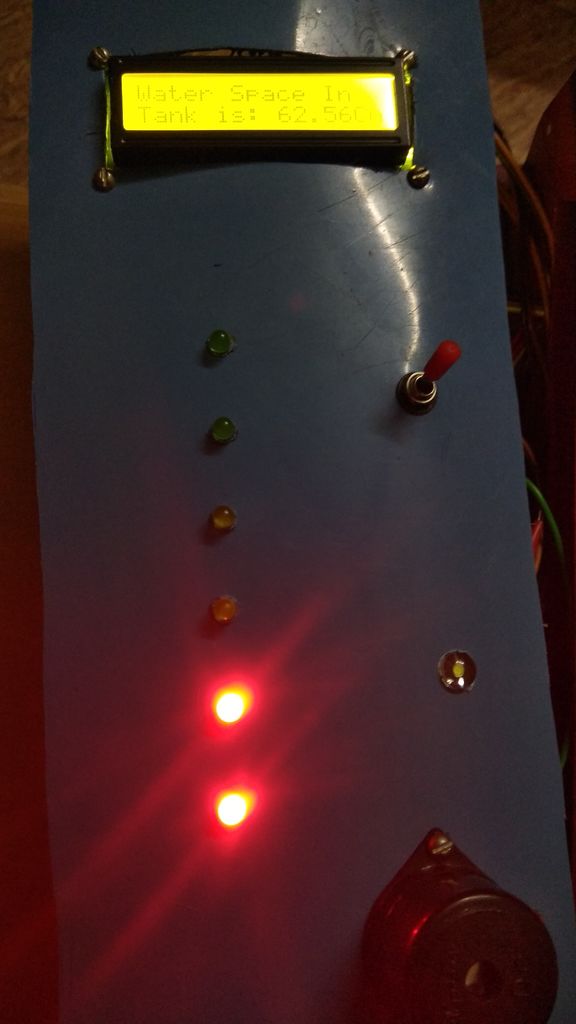
步驟18:修復(fù)墻上的框


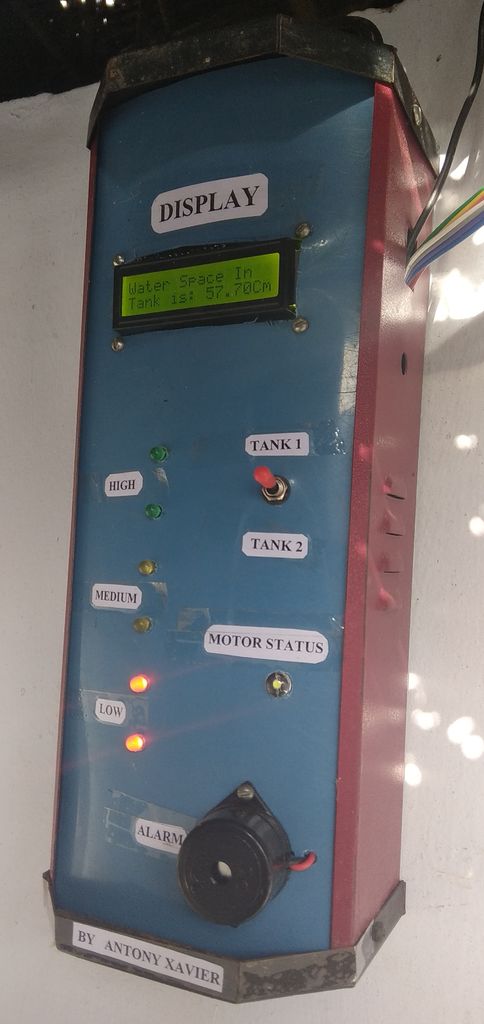





-
水位監(jiān)測(cè)
+關(guān)注
關(guān)注
0文章
49瀏覽量
10760
發(fā)布評(píng)論請(qǐng)先 登錄
TPA626雙向電流和功率監(jiān)測(cè)器數(shù)據(jù)手冊(cè)
水位監(jiān)測(cè)物聯(lián)網(wǎng)系統(tǒng)解析及應(yīng)用場(chǎng)景
水庫(kù)水位實(shí)時(shí)監(jiān)測(cè)報(bào)警系統(tǒng):高精度監(jiān)測(cè),水位變化無(wú)所遁形

焊接工藝過(guò)程監(jiān)測(cè)器的應(yīng)用與優(yōu)化
Diodes高帶寬電流監(jiān)測(cè)器產(chǎn)品概述

河道水位精準(zhǔn)監(jiān)測(cè)要用到哪些傳感器

投入式水位計(jì)如何監(jiān)測(cè)河湖水位

數(shù)字功率監(jiān)測(cè)器入門

水位雨量監(jiān)測(cè)設(shè)備生產(chǎn)廠家推薦,水位雨量在線監(jiān)測(cè)系統(tǒng)介紹

水位監(jiān)測(cè)站的功能特點(diǎn)有哪些?

TI電池監(jiān)控器IC的高級(jí)電量監(jiān)測(cè)器固件流程圖





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論