") 分頁式顯示器的制作
分頁式顯示器的制作

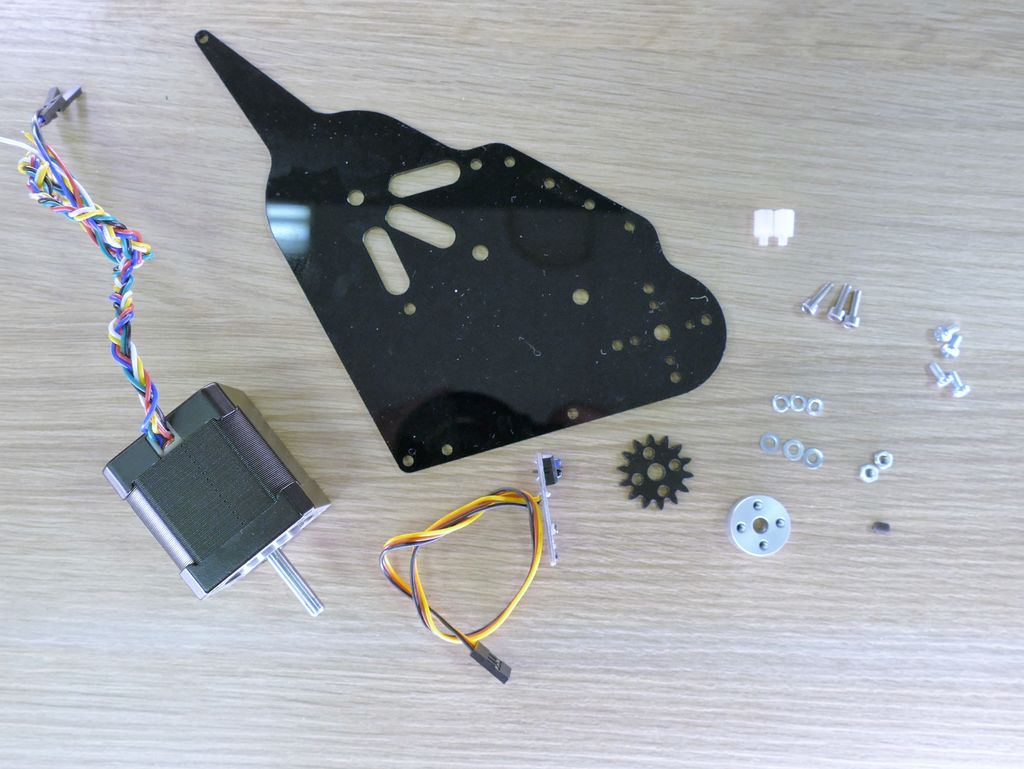
步驟1:準(zhǔn)備工具
制作這個(gè)項(xiàng)目需要做幾件事:
安裝了打印機(jī)和XOD IDE的家用電腦。
剪刀。
快船。
一組船員。
鉆頭和鉆頭。
Dremel切割金屬軸。
M3螺紋攻絲。
焊接工具。
步驟2:準(zhǔn)備。 Lasser Cutting。
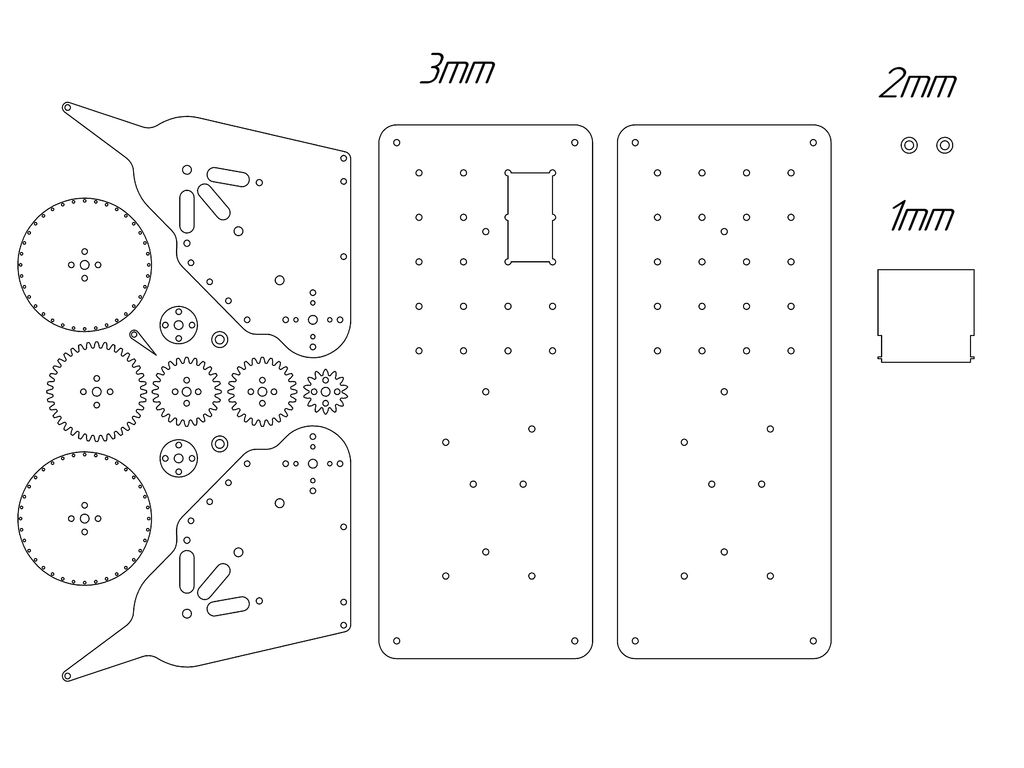
我選擇有機(jī)玻璃作為身體部位和激光切割制造的材料。以下是您需要自行訂購或制作的4位數(shù)顯示器的最小部件列表:
磁盤3mm厚度 - 8件。
面板3毫米厚度 - 8件。
3mm厚的大齒輪 - 4件。
中型齒輪3mm厚度 - 8件。
3mm厚的小齒輪 - 4件。
齒套3mm厚 - 8件。
袖子3毫米厚度 - 8件。
袖子2毫米厚度 - 8件。
限制器3mm厚度 - 4件。
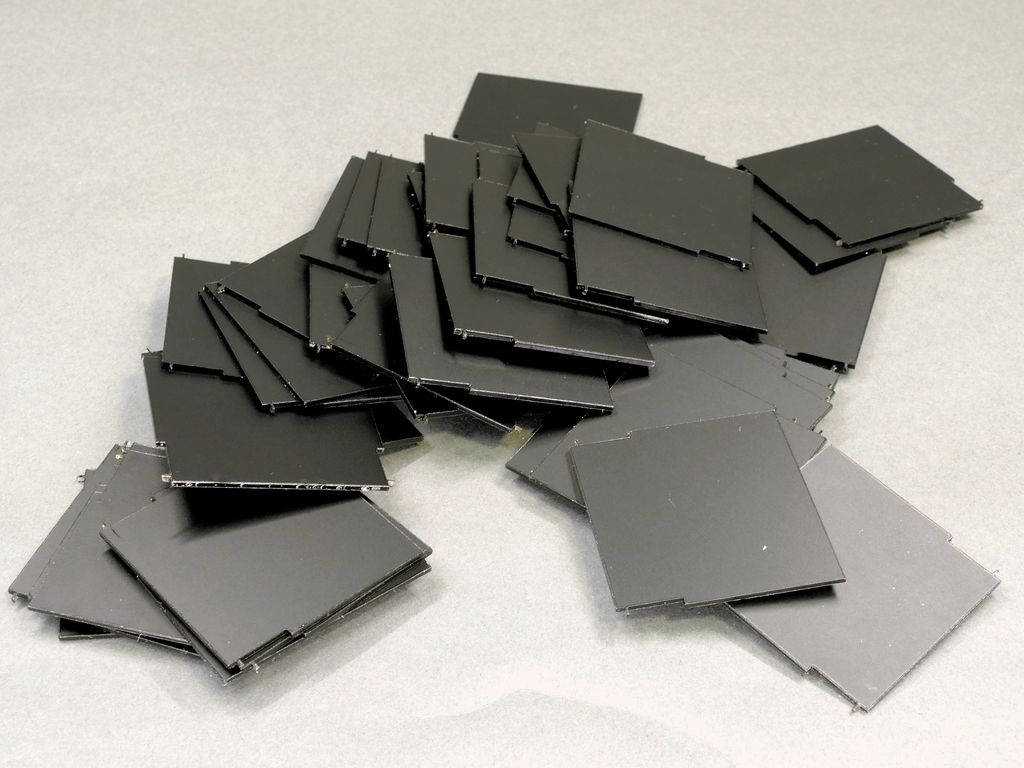
翻轉(zhuǎn)1毫米厚度 - 144件。
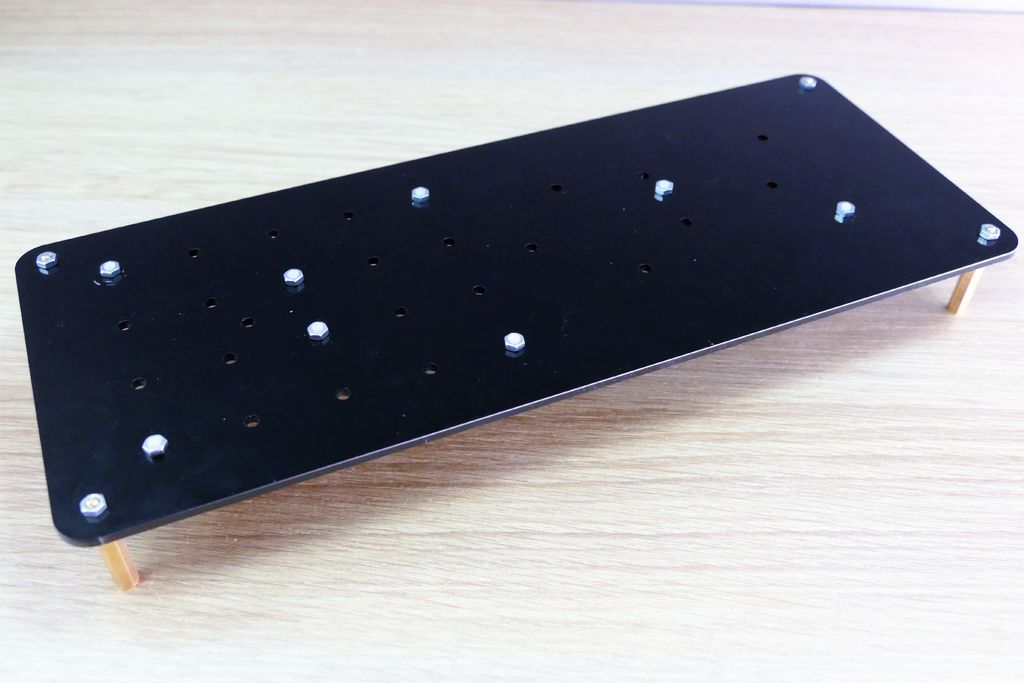
前電子面板3毫米厚 - 1件。
背面電子面板厚度3mm - 1件。
附上DXF CAD文件。
第3步:準(zhǔn)備。購物清單。
您需要獲取的最低要求清單。請記住,這不是強(qiáng)制性列表,可以替換組件。
電子產(chǎn)品:
單極步進(jìn)電機(jī)Nema 17 1.8deg 12V 42x42x48mm - 4件。鏈接
數(shù)字線跟蹤傳感器 - 4件。鏈接
Arduino mega 2560 - 1件。鏈接
Arduino步進(jìn)驅(qū)動模塊 - 4件。鏈接
Arduino ESP 8266 AT-modem模塊 - 1件。鏈接
按鈕 - 2件。鏈接
Arduino原型盾 - 3件。鏈接
原型線 - 1包。鏈接
USB(A - B)線 - 1個(gè)。鏈接
金屬件:
鋼角支撐約30x30mm - 3件。鏈接
直徑5mm的鋼或黃銅棒/軸,長度約為1米。
PCB支撐和墊片:
PCB黃銅或鋼制六角形支座M3公頭 - 母頭長25mm - 16件。鏈接
PCB黃銅或鋼制六角形支座M3母頭 - 母頭長25mm - 16件。鏈接
PCB黃銅或鋼制六角形支座M3公頭 - 母頭40mm長度 - 16件。鏈接
PCB黃銅或鋼制六角形支座M3公頭 - 母頭32mm長度 - 12件。鏈接
PCB黃銅或鋼制六角形支座M3公頭 - 母頭長10mm - 12件。鏈接
PCB尼龍六角支架M3公頭 - 母頭8mm長度 - 16-20件。鏈接
硬件:
六角螺母M3(DIN 934)。
彈簧墊圈M3(DIN 127)。
墊圈M3(DIN 125)。
螺釘M3(DIN7985/DIN 84/DIN 912)長度為16mm。
螺釘M3(DIN7985/DIN 84/DIN 912)長度為10mm。
螺釘M3(DIN7985/DIN 84/DIN 912)長度為6-8mm。
其他:
自粘紙 - 1件。鏈接
尼龍拉鏈帶 - 1個(gè)裝。鏈接
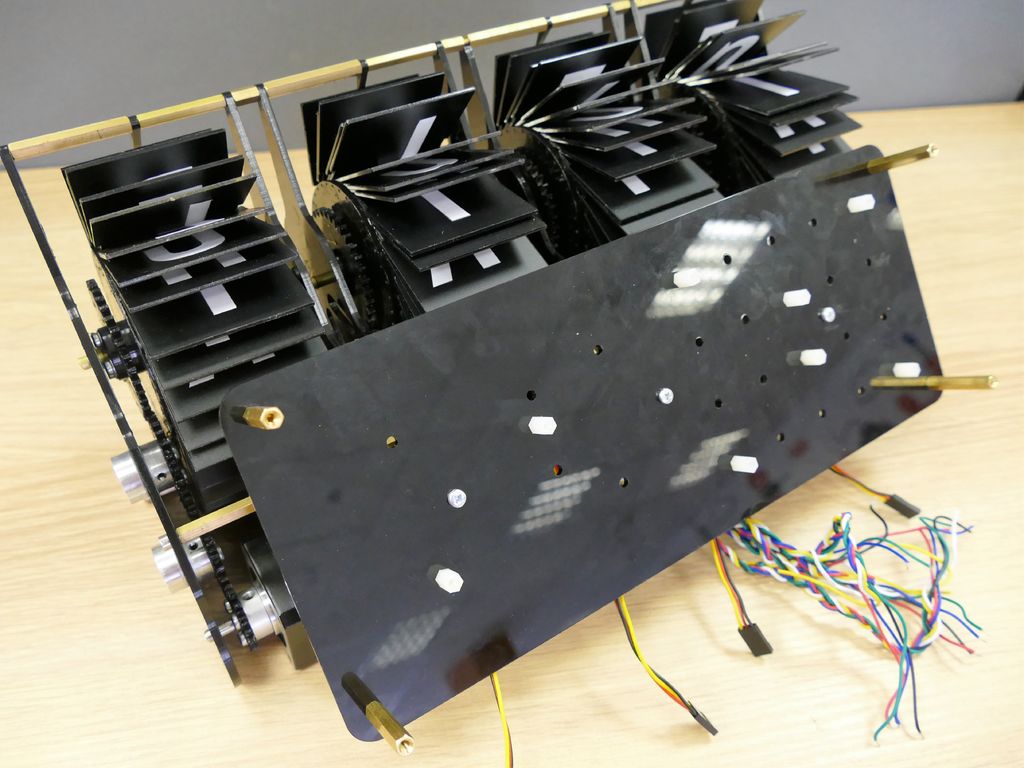
第4步:力學(xué)。制作襟翼。



字符
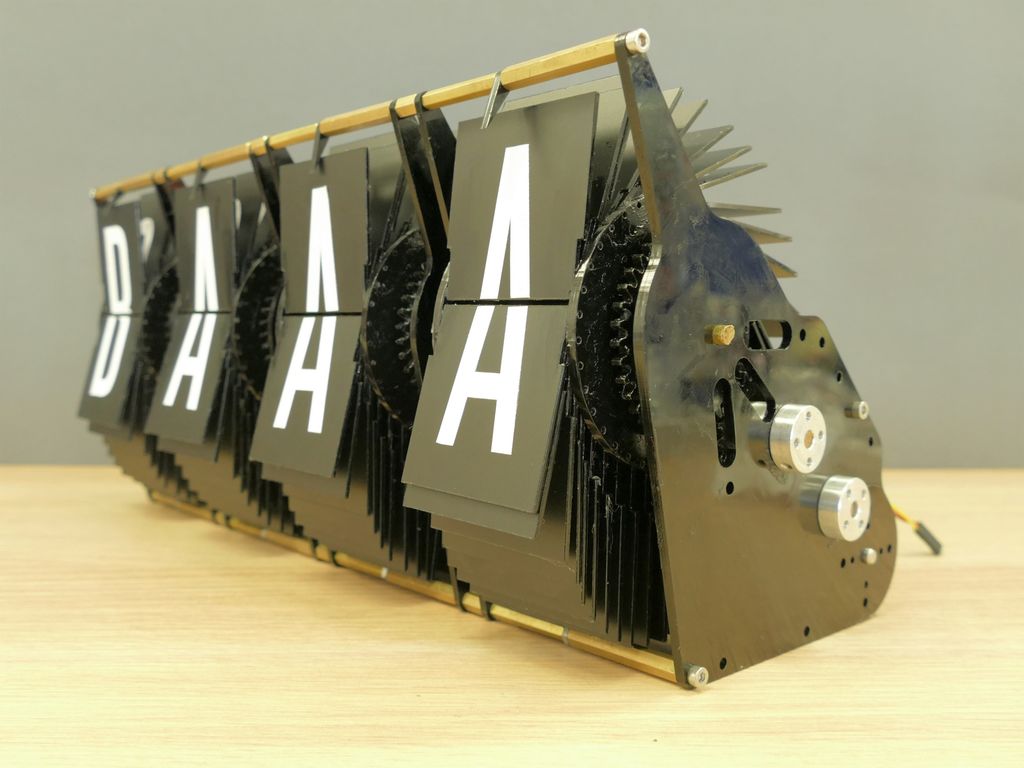
在此項(xiàng)目中,顯示屏的數(shù)字容量為4.顯示屏采用模塊化結(jié)構(gòu),可輕松擴(kuò)展。您可以隨意增加或減少位數(shù)。
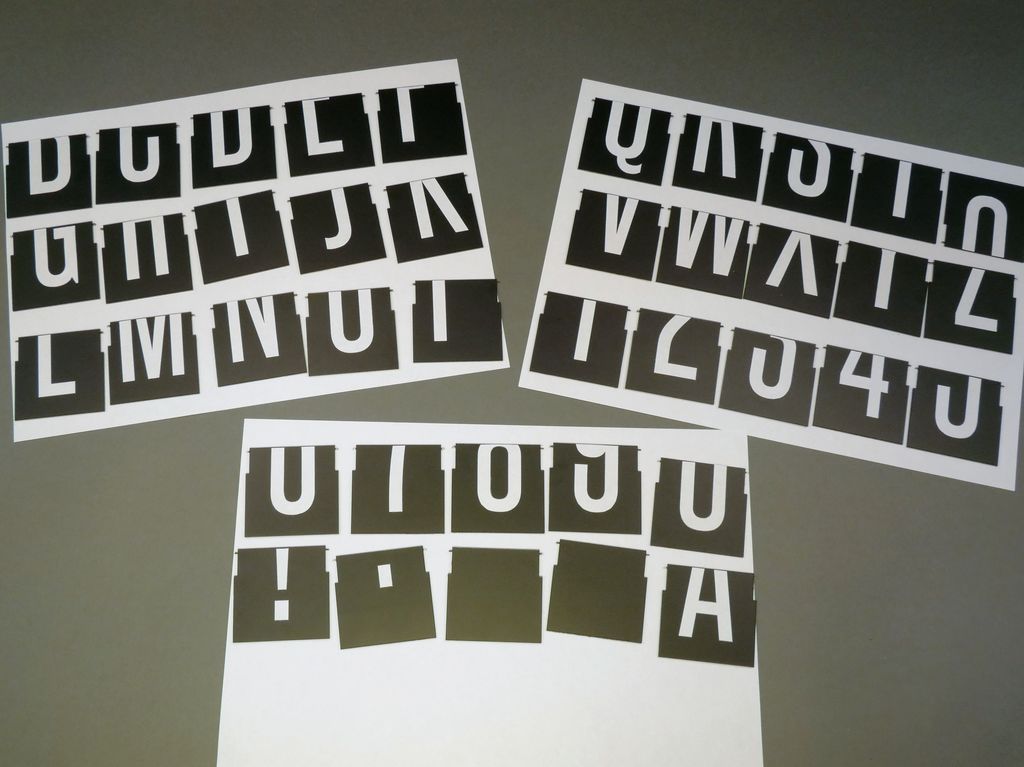
每個(gè)數(shù)字有36個(gè)襟翼:
26個(gè)襟翼用于拉丁字母(ABCDEFGHIJKLMNOPQRSTU VWXYZ)。
9個(gè)襟翼用于數(shù)字(1 2 3 4 5 6 7 8 9)。
1個(gè)空襟翼用于間距(用于顯示零我使用‘O’字母)。
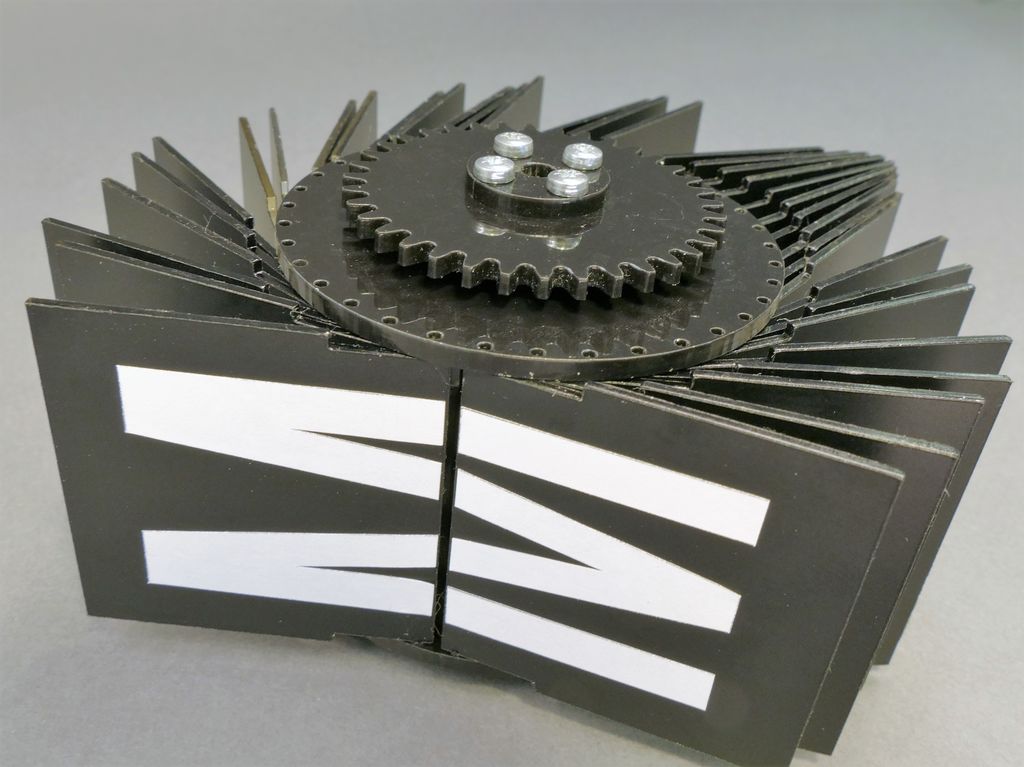
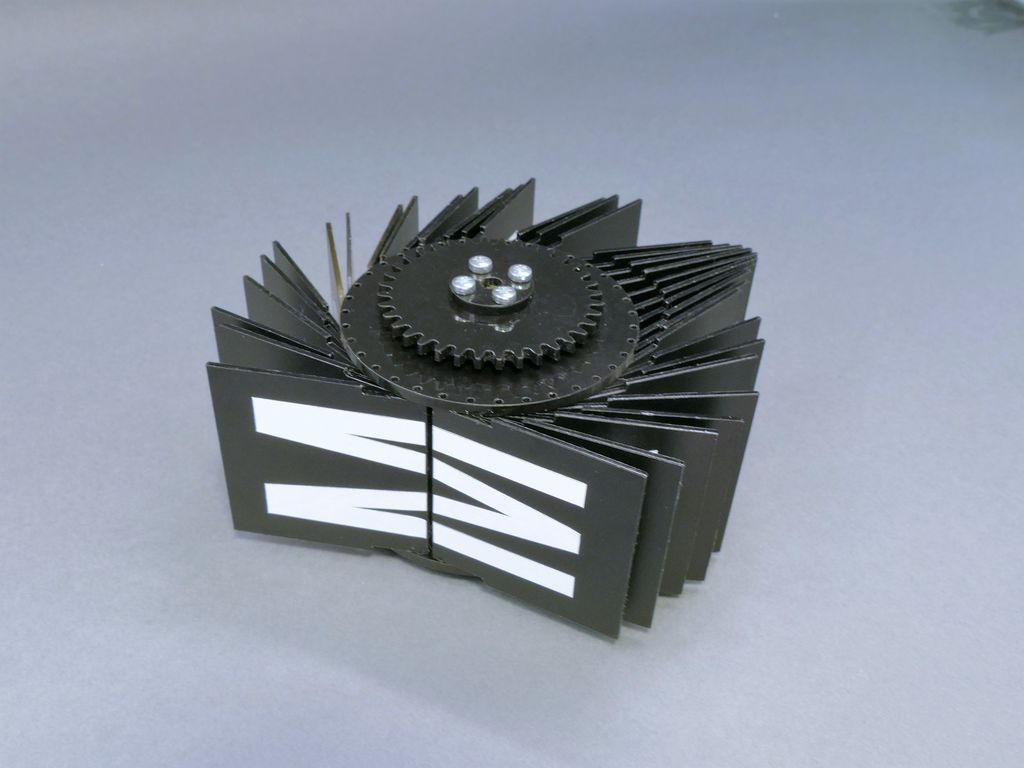
翻蓋的正面有一個(gè)當(dāng)前字符的頂部,背面有下一個(gè)字符的底部。
我用于字母的字體是“Steelfish rg”。你可以在這里找到它
材料清單
144襟翼。
我從1毫米透明有機(jī)玻璃清單上翻了一下兩面都是黑色電影。您可以使用任何材料制作它們。
不要忘記增加翻轉(zhuǎn)托盤圓盤中安裝孔的直徑如果要使用厚度超過1毫米的列表。對于翻轉(zhuǎn)的制造商,我使用激光切割。
144(36 x 4)是最低數(shù)量,但我強(qiáng)烈建議你做更多。在我的情況下,翻蓋安裝在翻蓋支架上的耳朵變得非常微弱,我打破了十幾個(gè)翻轉(zhuǎn)。
自粘紙。
我使用了Lomond的多功能白色自粘紙。一包50張就足夠了。我確信很容易找到替代品。
流程
使用自粘印刷字母紙。帶有1:1比例字母的pdf文件附在下面。
用剪刀剪掉字母頂部的輪廓。例如“A”的頂部。
在必要的地方將“A”字母的頂部粘貼到翻蓋的正面。
剪下下一個(gè)字母底部的輪廓。例如“B”的底部。
翻轉(zhuǎn)翻蓋并粘貼字母“B”的底部。
“A - B”翻蓋準(zhǔn)備就緒。對每個(gè)角色重復(fù)這些步驟。
我可以毫無疑問地說這是一個(gè)非常費(fèi)力的過程。
如果你有機(jī)會打印角色兩邊的翻轉(zhuǎn),一定要使用它。
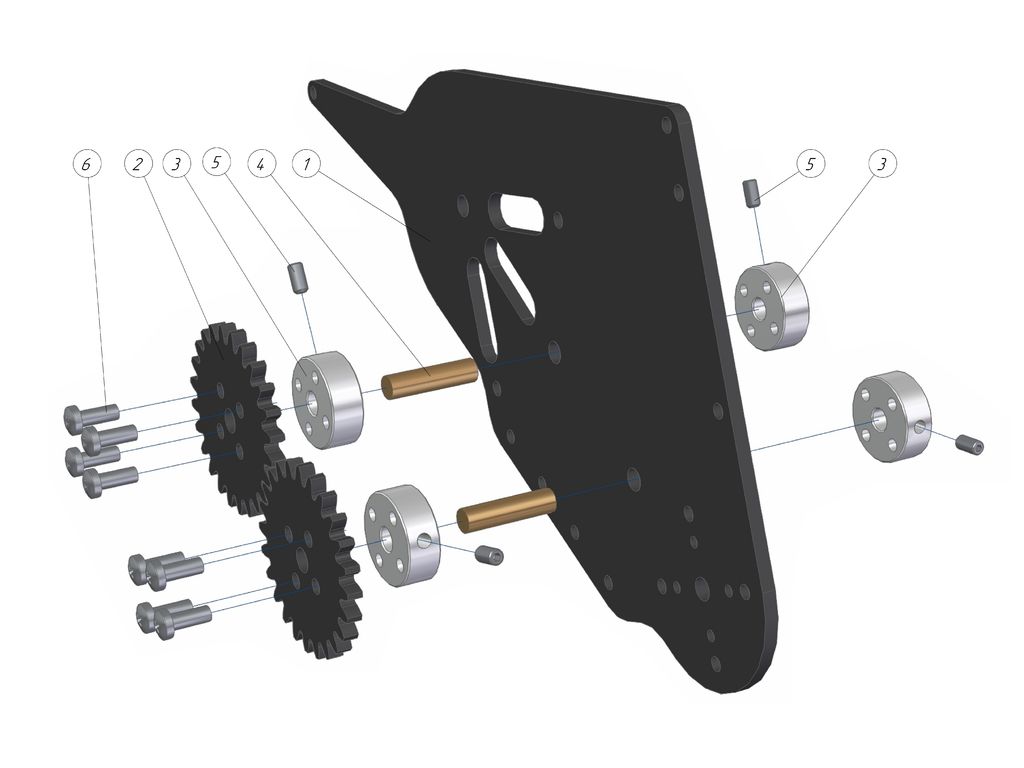
第五步:力學(xué)。組裝翻轉(zhuǎn)持有者。
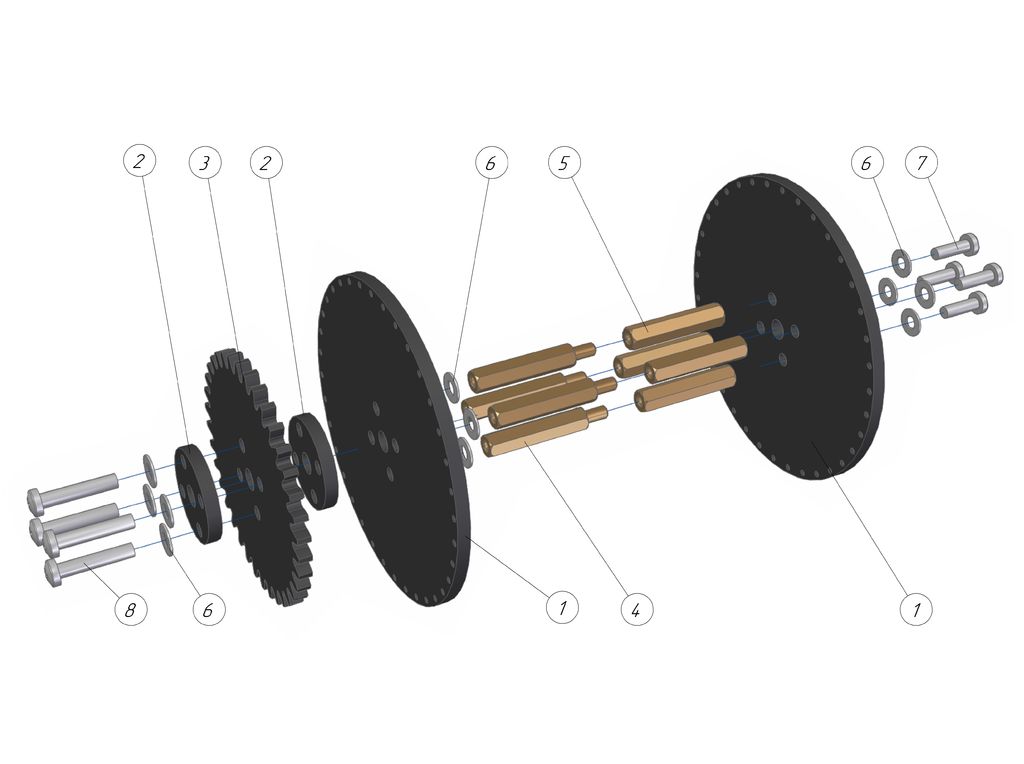

材料清單
要組裝一個(gè)翻轉(zhuǎn)支架,您需要這個(gè)位置:
1。有機(jī)玻璃盤3毫米 - 2件。
2。有機(jī)玻璃齒輪套3mm - 2件。
3。大型有機(jī)玻璃齒輪3mm - 1件。
4。 PCB六角支架M3公母 - 長25mm - 4件。
5。 PCB六角支架M3母 - 母25mm長 - 4件。
6。墊圈M3(DIN 125) - 12件。
7。螺釘M3(DIN7985/DIN 84/DIN 912)10mm長度 - 4件。
8。螺釘M3(DIN7985/DIN 84/DIN 912)16mm長度 - 4件。
9。 36翻轉(zhuǎn)上一步。
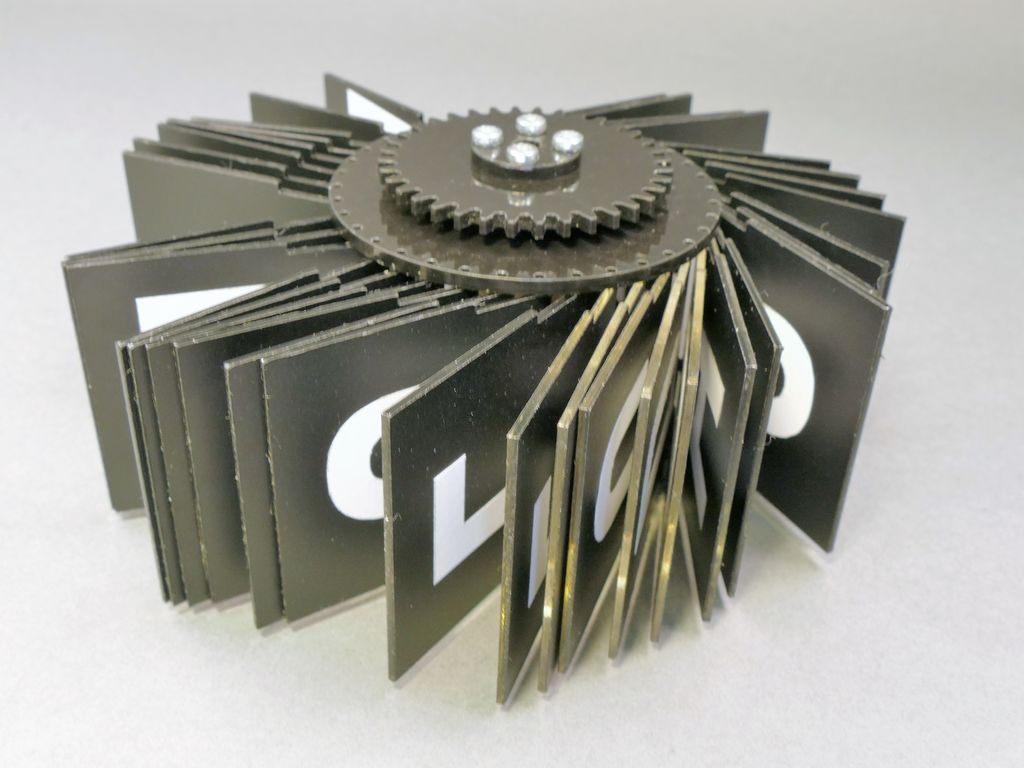
組裝過程
查看草圖(圖1和圖2)。圖像將幫助您進(jìn)行組裝。
擰緊支架(位置4)和支架(位置5)。
Fasten使用洗滌(pos.6)和16mm螺絲(pos.8)的支架,左盤(pos.1),套筒(pos.2),齒輪(pos.3),如草圖所示。
使用洗滌液(位置6)和10mm螺絲(位置7)將右側(cè)圓盤(位置1)用支架擰緊,但不要擰緊。
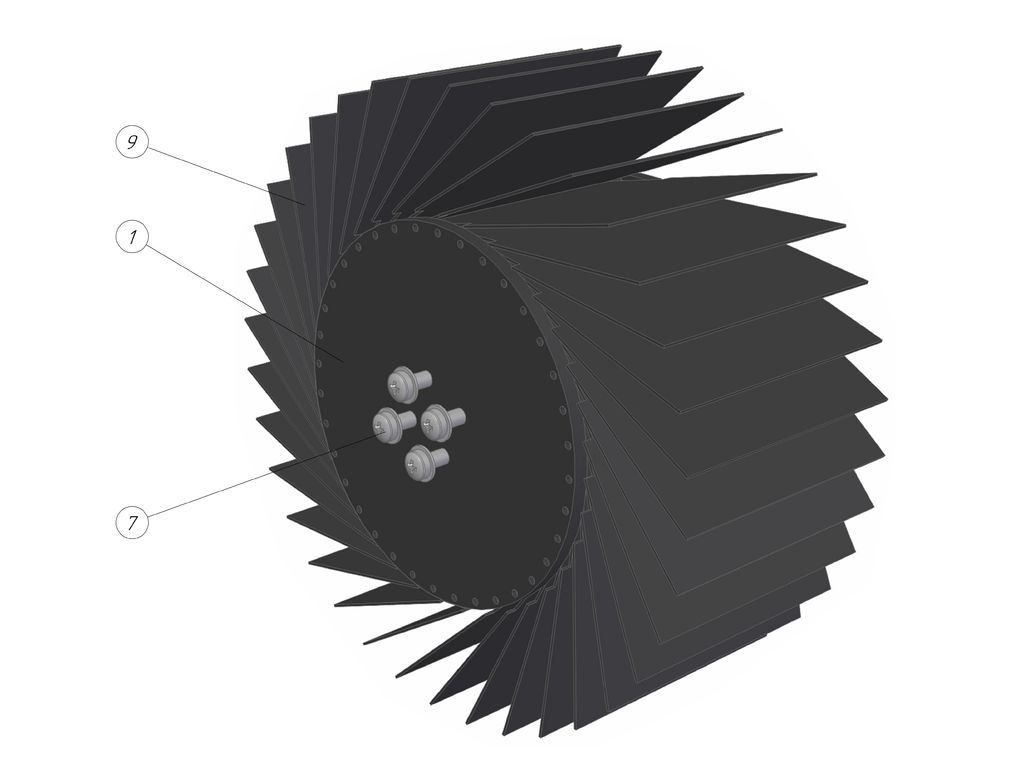
用耳朵夾住磁盤(pos.1)之間的所有翻轉(zhuǎn)(pos.9)。
擰緊螺絲(位置7) 。
確保所有翻轉(zhuǎn)都在孔中自由旋轉(zhuǎn)而不會卡住。
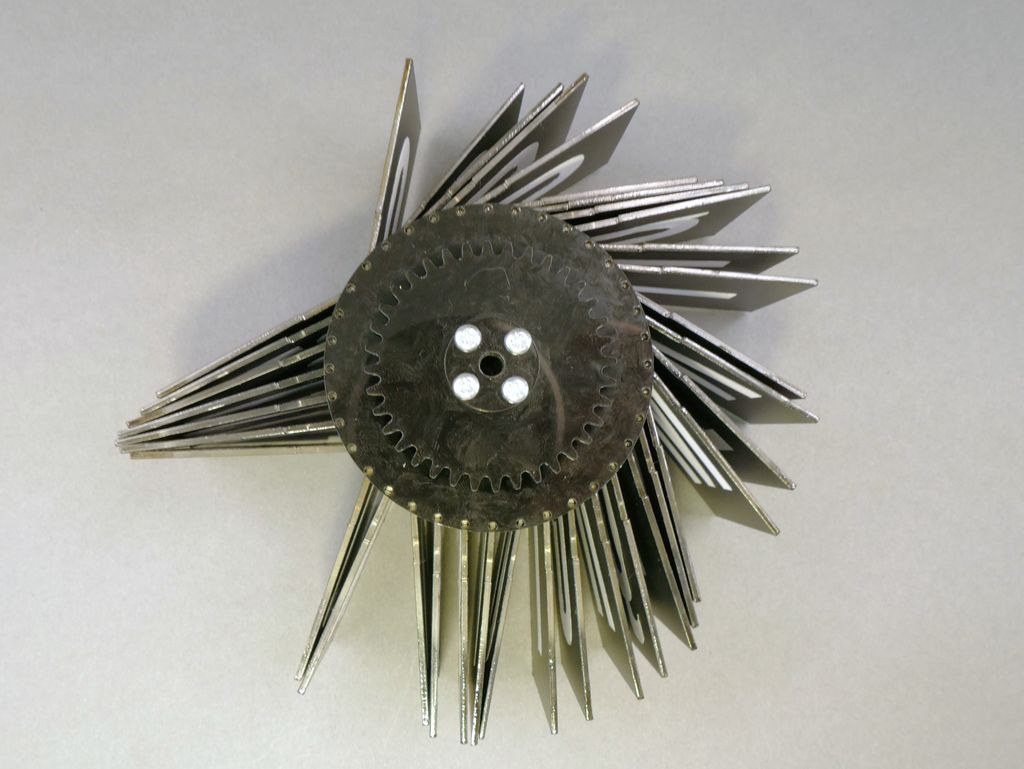
粘貼一條自粘紙?jiān)诜w上。帶條的位置設(shè)置翻蓋的默認(rèn)位置(圖7)。
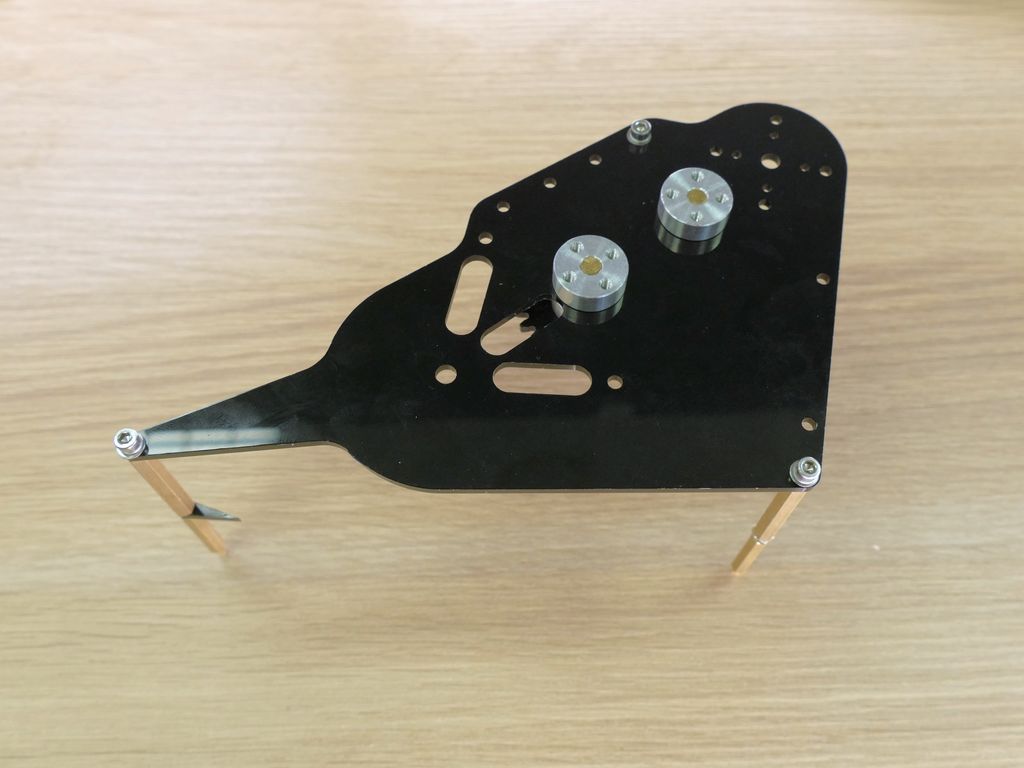
第6步:力學(xué)。組裝左側(cè)面板。
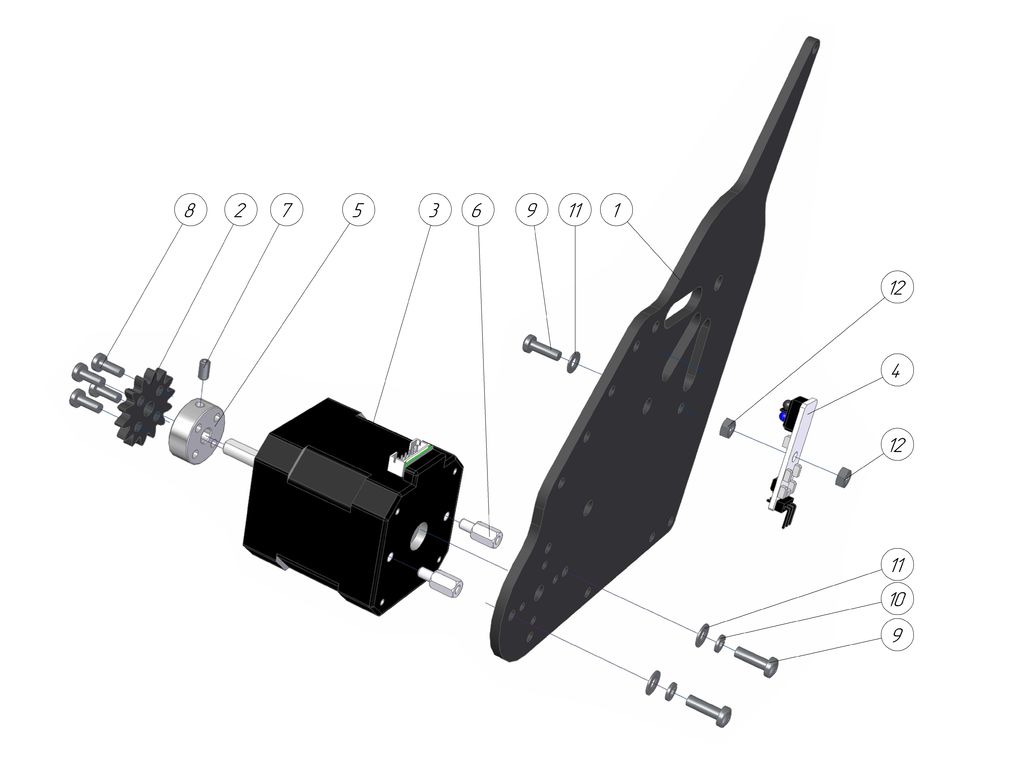







材料清單
要組裝一個(gè)左側(cè)面板,您需要以下位置:
1。有機(jī)玻璃面板3mm - 1件。
2。小型有機(jī)玻璃齒輪3mm - 1件。
3。單極步進(jìn)電機(jī)Nema 17 1.8deg 12V 42x42x48mm - 1件。
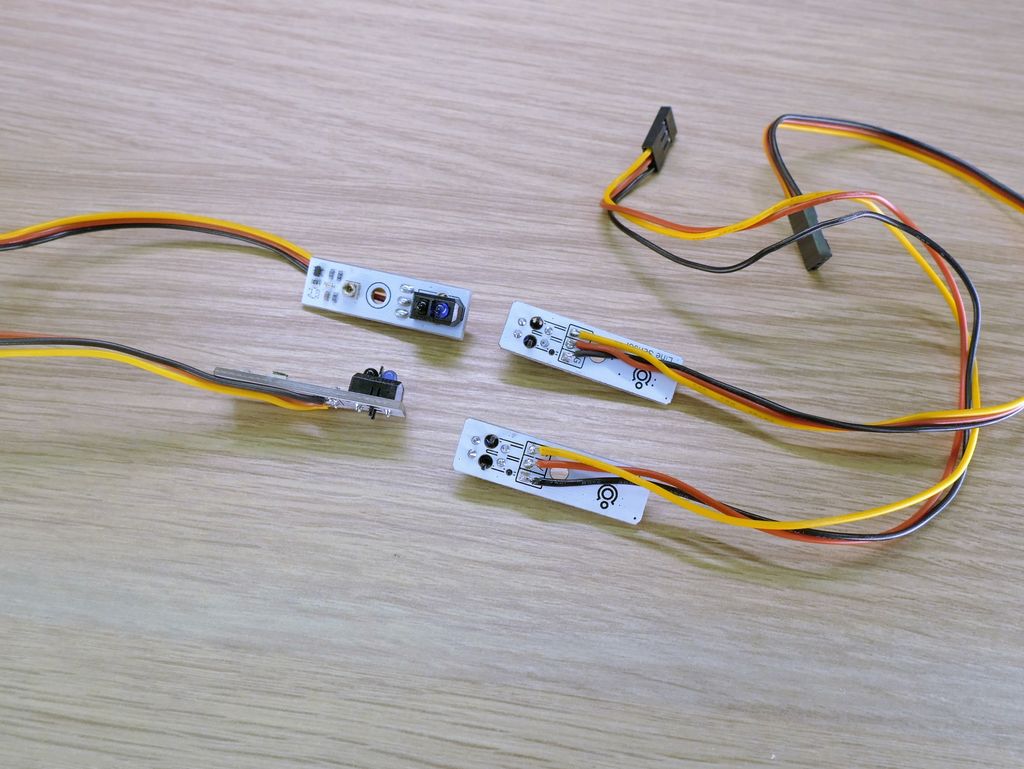
4。數(shù)字線跟蹤傳感器 - 1件。
5。鋁制安裝輪轂,用于5mm軸,帶有四個(gè)M3孔 - 1個(gè)。
6。 PCB尼龍六角支架M3公母 - 長8mm - 2件。
7。內(nèi)六角固定螺釘(ISO 4026/EU 24026/DIN 913) - 1件。
8。螺釘M3(DIN7985/DIN 84/DIN 912)6-8mm長度 - 4件。
9.螺釘M3(DIN7985/DIN 84/DIN 912)10mm長度 - 3件。
10.彈簧墊圈M3(DIN 127) - 2件。
11.墊圈M3(DIN 125) - 3件。
12.六角螺母M3(DIN 934) - 2件。
準(zhǔn)備工作
從步進(jìn)電機(jī)(位置3)上拆下4個(gè)長螺釘并取下后蓋
在后蓋上制作兩個(gè)M3尺寸的水龍頭(圖2)。孔之間的大致距離應(yīng)為30.5mm。
重新組裝步進(jìn)電機(jī)(位置3)。
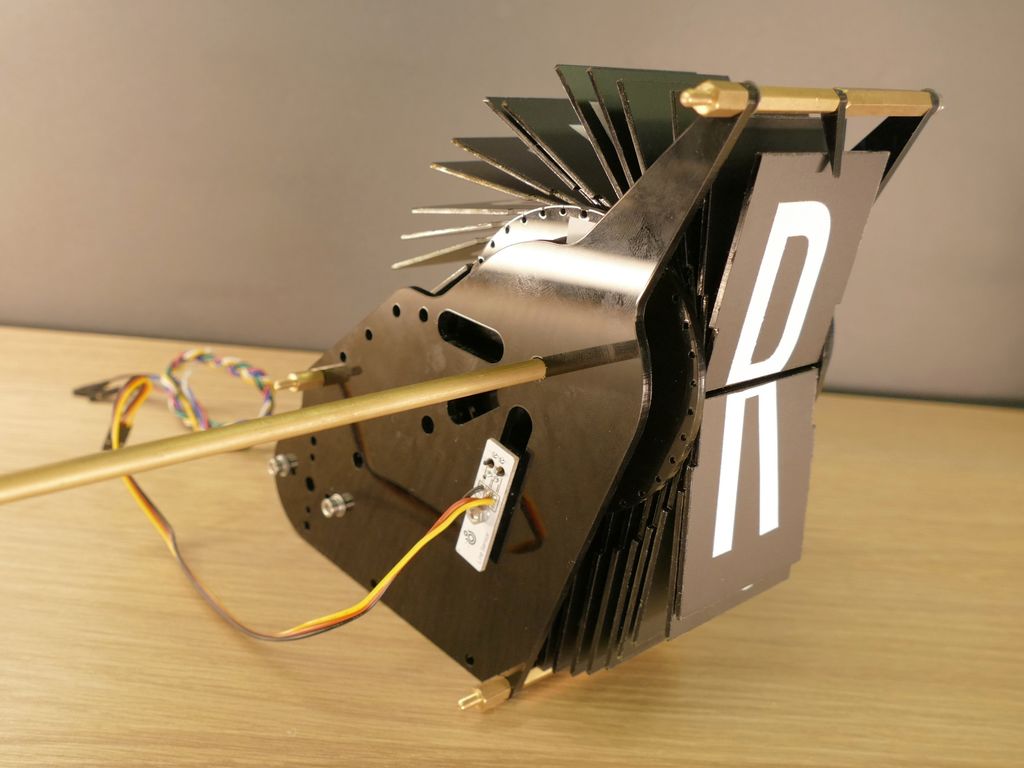
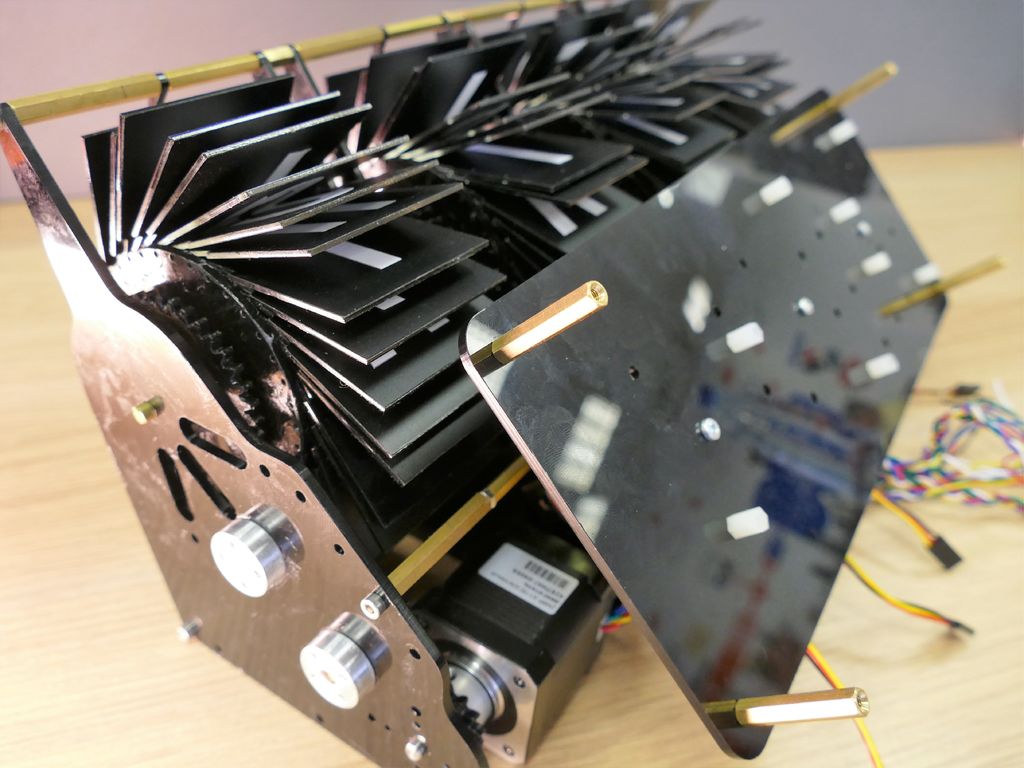
如果有必要,請更正線路跟蹤器傳感器這樣它可以適合面板(pos.1)。我不得不拆開傳感器PCB上的引腳,這樣它們就不會干擾。此外,我將電線直接焊接到PCB上(圖3和圖4)可能你不需要修理你得到的傳感器。
縮短尼龍支架(pos.6)這樣它們不會損壞電機(jī)線圈(圖5)。
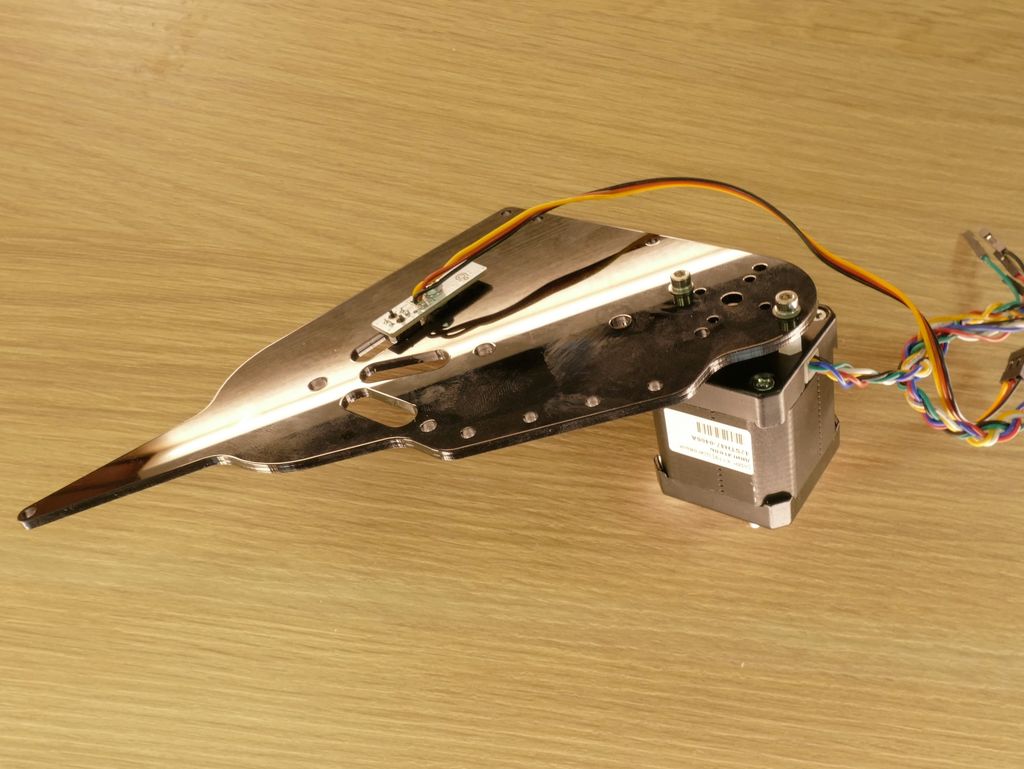
裝配過程
看看草圖(圖1)。圖像將幫助您進(jìn)行組裝。
使用螺母(位置12),螺釘(位置9),墊圈(位置11)將線傳感器(位置4)固定到面板(位置1)。
將尼龍支架(位置6)擰到步進(jìn)機(jī)(位置3)。
用步進(jìn)機(jī)(pos.3)固定面板(位置1)使用螺絲(位置9)和清洗(位置10和位置11)。
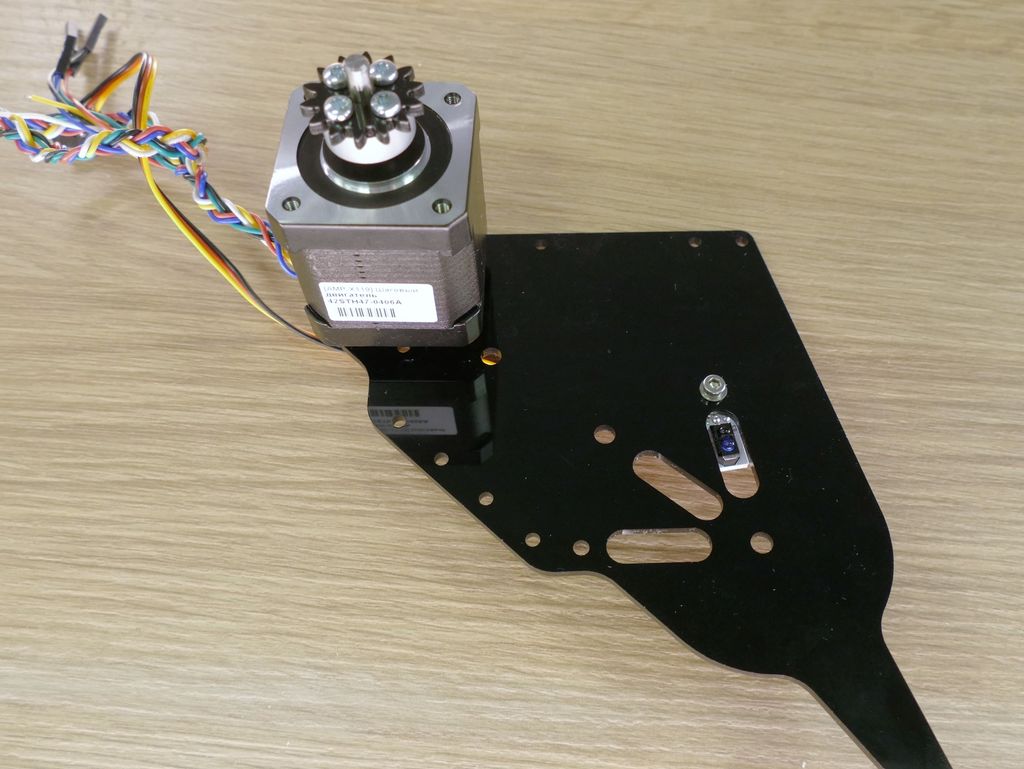
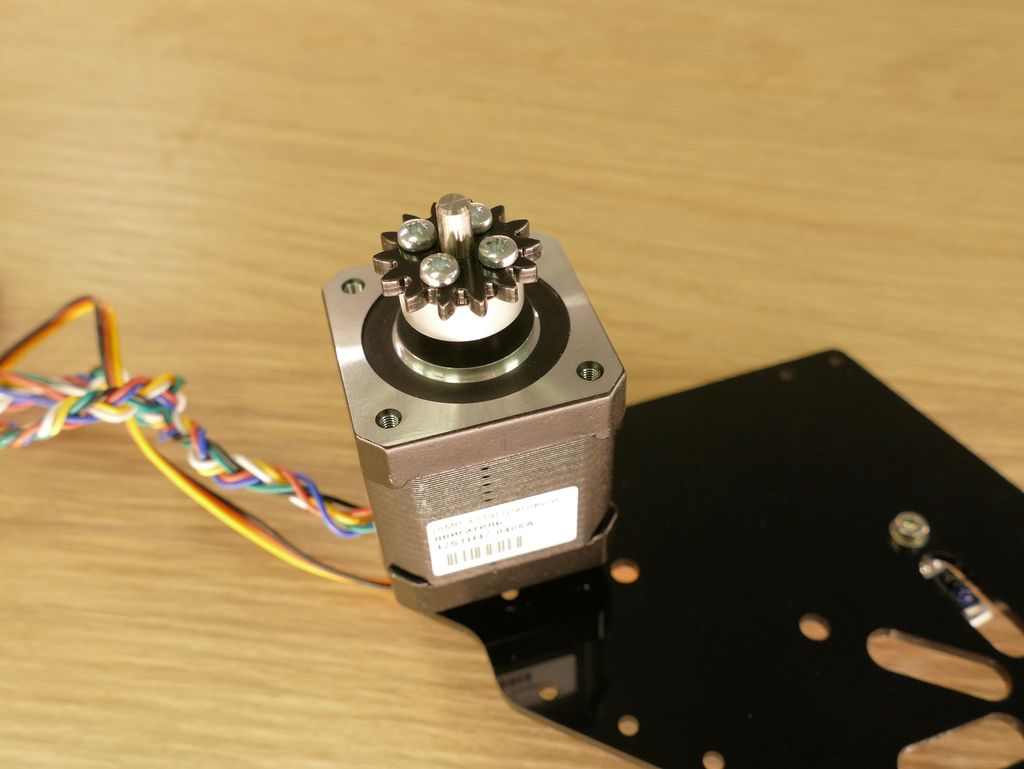
擰小有機(jī)玻璃齒輪(位置2)使用螺釘(位置8)安裝輪轂(位置5)。
使用內(nèi)六角螺釘將安裝輪轂(位置5)與步進(jìn)軸固定在一起( pos.7)。
對步進(jìn)軸進(jìn)行一些旋轉(zhuǎn),以確保支座(位置6)不會干擾步進(jìn)線圈。
第7步:力學(xué)。組裝右側(cè)面板。




準(zhǔn)備
從直徑5mm的棒上切下約20mm長的軸。
材料清單
要組裝一個(gè)右側(cè)面板,您需要這個(gè)位置:
1。有機(jī)玻璃面板3mm - 1件。
2。中型有機(jī)玻璃齒輪3mm - 2件。
3。鋁制安裝輪轂,用于5mm軸,帶有四個(gè)M3孔 - 4個(gè)。
4。軸直徑5mm,長約20mm - 2件。
5。內(nèi)六角固定螺釘(ISO 4026/EU 24026/DIN 913) - 4件。
6。螺釘M3(DIN7985/DIN 84/DIN 912)6-8mm長度 - 8件。
裝配過程
查看草圖(圖1)。圖像將幫助您進(jìn)行組裝。
使用螺釘(位置6)將兩個(gè)中型有機(jī)玻璃齒輪(位置2)擰到安裝輪轂(位置3)上。
使用內(nèi)六角螺釘(位置5)將安裝輪轂(位置5)與軸(位置4)固定在一起。
將軸(位置4)插入面板(位置1)并連接齒輪(位置2)。
使用安裝輪轂(位置5)和內(nèi)六角螺釘(位置)將軸(位置4)固定在面板(pos.1)的另一側(cè)。 5)。
確保齒輪自由旋轉(zhuǎn)而不會卡住。
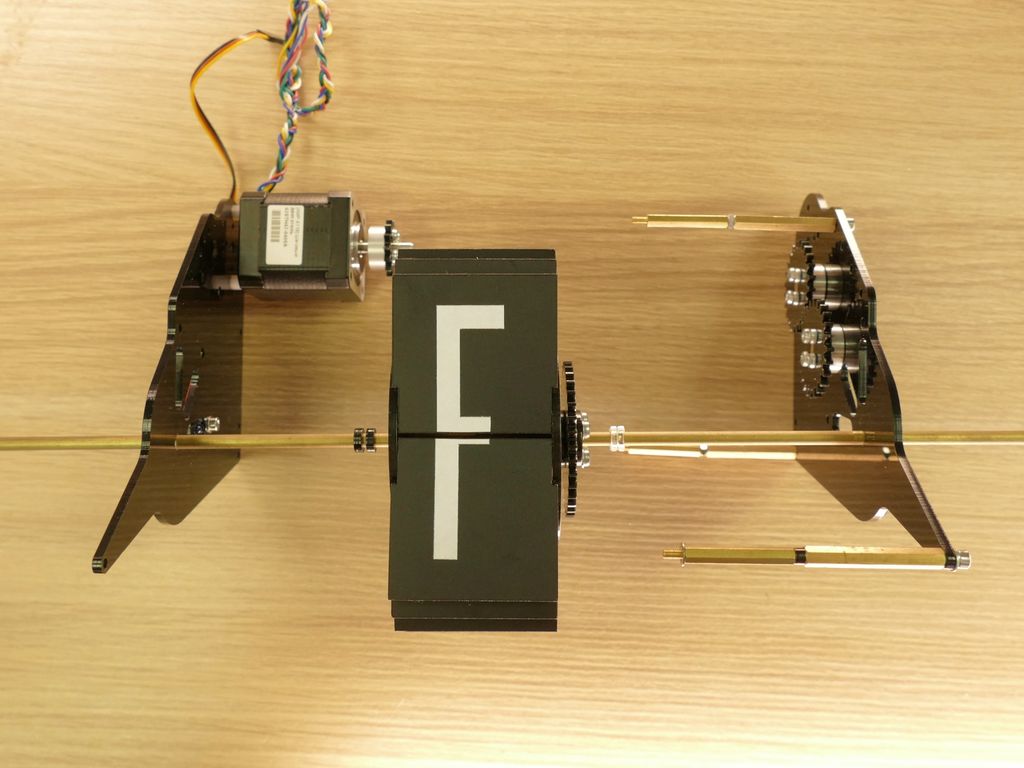
步驟8:力學(xué)。組裝數(shù)字。




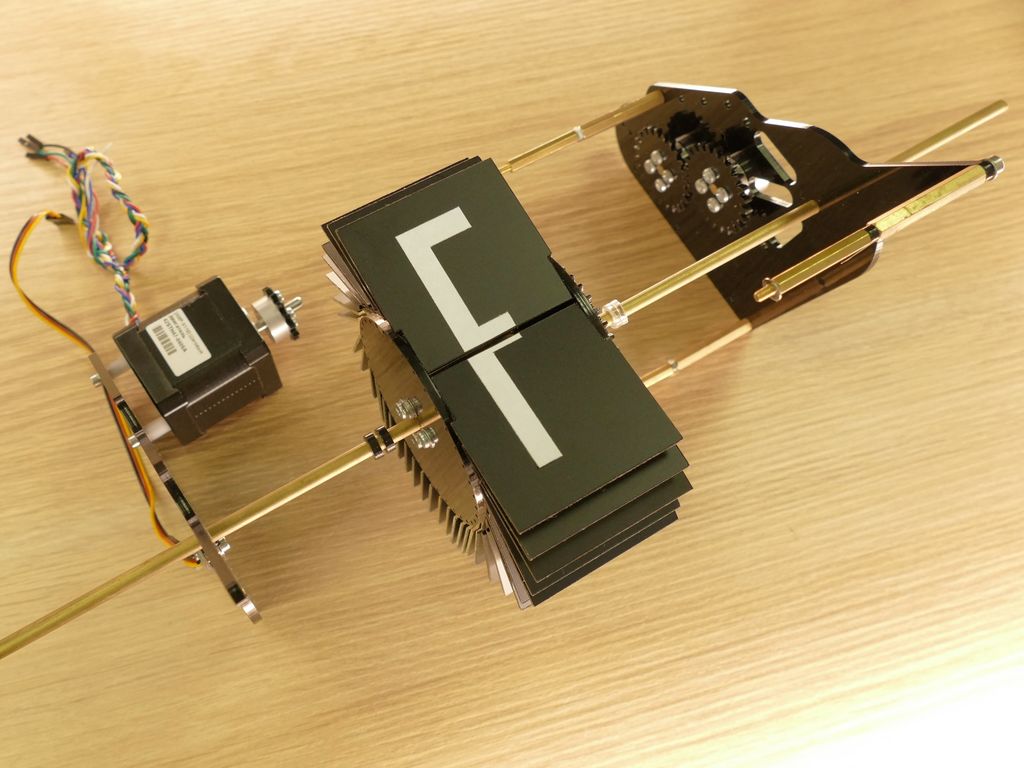
準(zhǔn)備工作
從5毫米直徑切割360毫米軸棒材。
材料清單
要組裝一個(gè)數(shù)字,您需要這個(gè)位置:
1。組裝翻轉(zhuǎn)支架 - 1件。
2。組裝左側(cè)面板 - 1件。
3。組裝右側(cè)面板 - 1件。
4。有機(jī)玻璃翻轉(zhuǎn)限制器3mm - 1件。
5。有機(jī)玻璃套管3mm - 2件。
6。有機(jī)玻璃套管2mm - 2件。
7。 PCB六角支架M3公母 - 長40mm - 3件。
8。 PCB六角支架M3公頭 - 母頭32mm長度 - 3件。
9。 PCB六角支架M3公頭 - 母頭10mm長或M3螺母和M3 10mm螺釘(取決于手指的位置:第一個(gè),最后一個(gè)或中間) - 3個(gè)。
10。六角螺母M3(DIN 934) - 2件。
11。鋼/黃銅軸。長度取決于數(shù)字計(jì)數(shù)。在這個(gè)項(xiàng)目中長度為360mm - 1件。
裝配過程
查看草圖(圖1)。圖像將幫助您進(jìn)行組裝。
將兩個(gè)支座(位置7)擰到支座(位置8)和六角螺母(位置10)上。
固定有機(jī)玻璃翻轉(zhuǎn)限制器( pos.4)在一個(gè)支座(pos.7)和支座(pos.8)之間。
使用支架將裝配好的支架與右側(cè)面板(位置3)固定在一起(位置9)或M3 10mm螺絲。
將翻轉(zhuǎn)支架(位置1)安裝在軸(位置11)上。
將兩個(gè)3毫米套管(位置5)安裝在翻轉(zhuǎn)支架左側(cè)的軸(位置11)上。
安裝2個(gè)2mm在翻轉(zhuǎn)支架右側(cè)的軸(位置11)上的套筒(位置6)。
將軸插入左右面板(pos.2)和pos.3)。
使用支架(pos.9)用面板(pos.2和pos.3)夾住翻蓋(pos.1)或M3 10毫米螺釘。
用手旋轉(zhuǎn)步進(jìn)電機(jī)的軸,確保所有齒輪自由旋轉(zhuǎn)而不會卡住。如有必要,潤滑變速箱。任何塑料或凡士林的潤滑劑都可以。
are調(diào)整限制器(位置4),使當(dāng)前的頂部翻蓋不會直立。不要用限制器強(qiáng)力按下翻蓋。一個(gè)重要的力量會打破翻轉(zhuǎn)的耳朵。
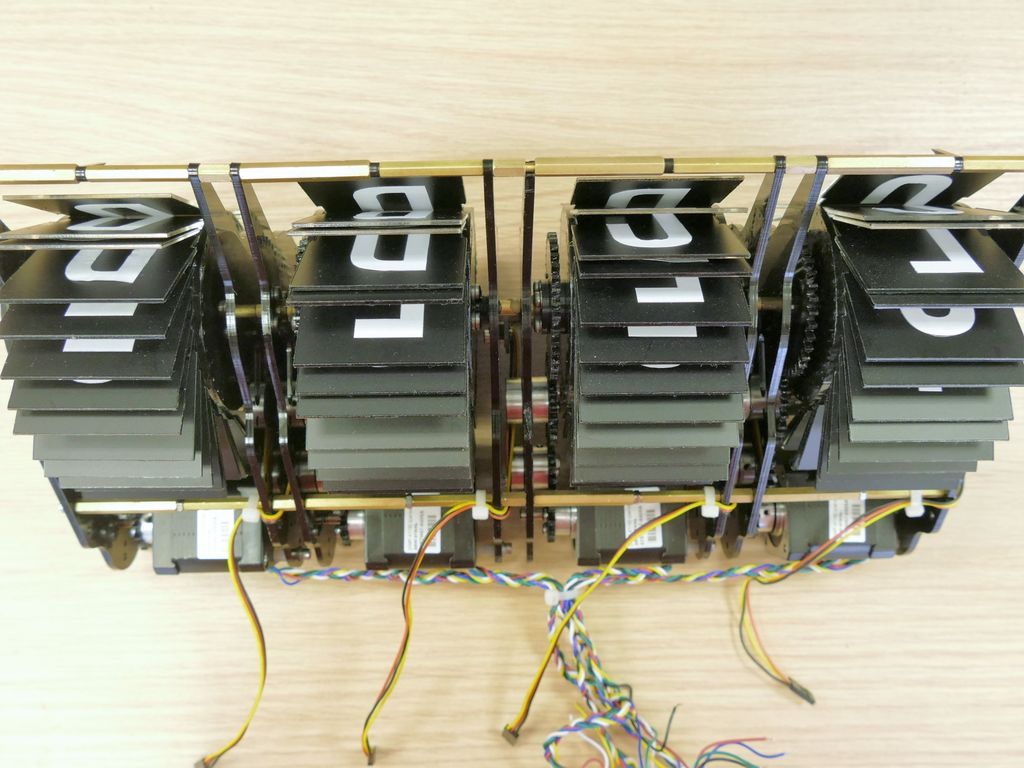
步驟9:力學(xué)。合并所有數(shù)字。




材料清單
可選:
1。螺釘M3(DIN7985/DIN 84/DIN 912)10mm長度 - 1件。
2。鋁制安裝輪轂,用于5mm軸,帶有四個(gè)M3孔 - 1個(gè)。
3。內(nèi)六角止動螺釘(ISO 4026/EU 24026/DIN 913) - 1件。
裝配過程
完成每個(gè)數(shù)字的所有先前步驟。
完成顯示鏈接數(shù)字。
為方便起見,電線可以用扎帶固定。
可選:
主軸可以固定在其中一個(gè)面板上(圖2),以防止旋轉(zhuǎn)。
將安裝輪轂安裝到軸的邊緣。/p》
用固定螺絲固定。
鉆出面板上的3mm孔,使孔的軸重合安裝輪轂中螺紋的軸線。
使用M3螺釘將安裝輪轂固定在面板上。
第10步:力學(xué)。使用電子設(shè)備安裝面板。



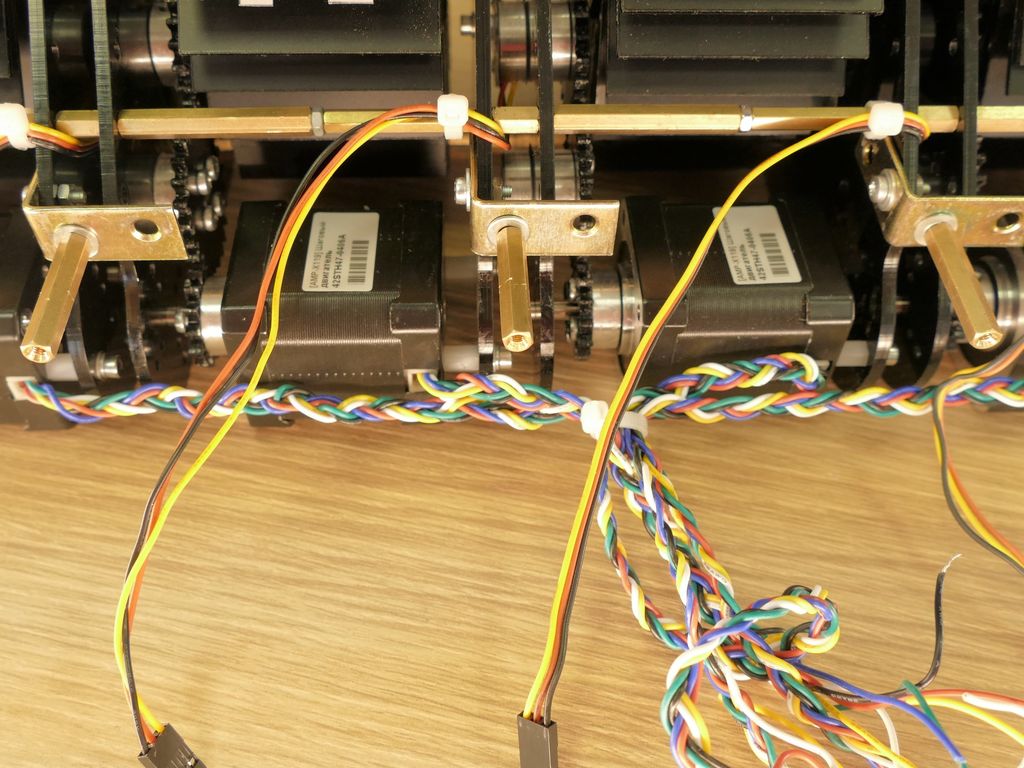


您應(yīng)該安裝以將面板與電子元件連接。
材料清單
1。鋼角支撐約30x30mm(pic.1) - 3件。
2。螺釘M3(DIN7985/DIN 84/DIN 912)10mm長度 - 6件。
3。墊圈M3(DIN 125) - 6件。
4。六角螺母M3(DIN 934) - 6件。
5。 PCB六角形支架M3公母 - 長度超過30mm - 3件。
準(zhǔn)備
可選:
如果有必要,在支架上鉆一個(gè)合適的3-3.5mm孔。
裝配過程
使用螺母和螺釘將支座固定到支架上(圖2)。
將組裝好的支架擰到顯示屏上(圖4) ,圖5,圖6)使用螺母和螺釘。
將牙箍設(shè)置為所需的角度。
擰緊緊固件。
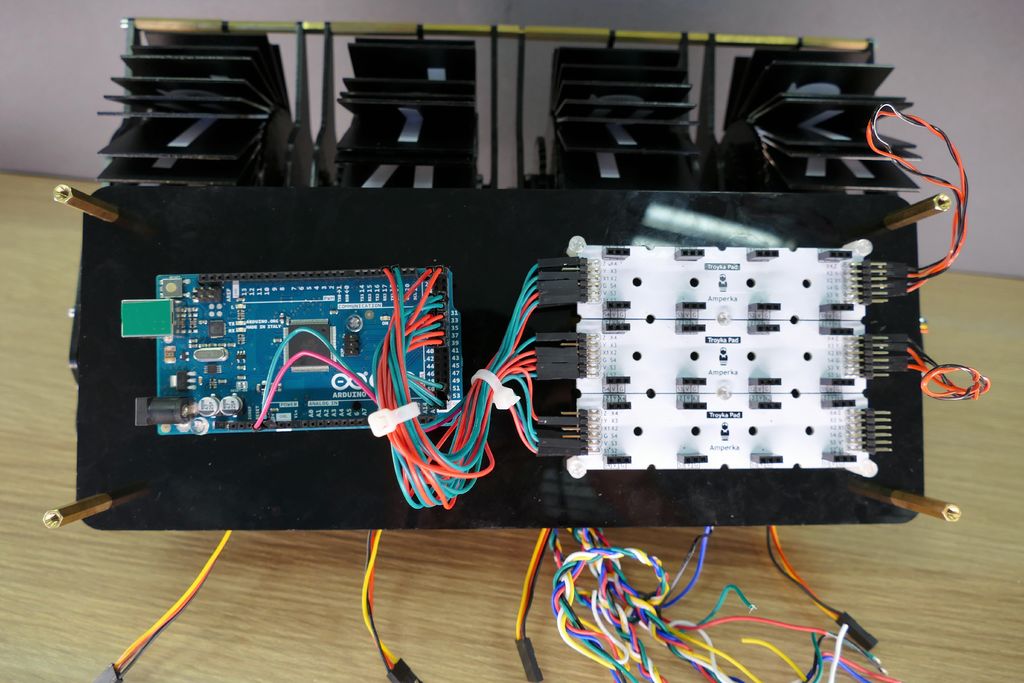
步驟11:電子設(shè)備。組裝電子面板。


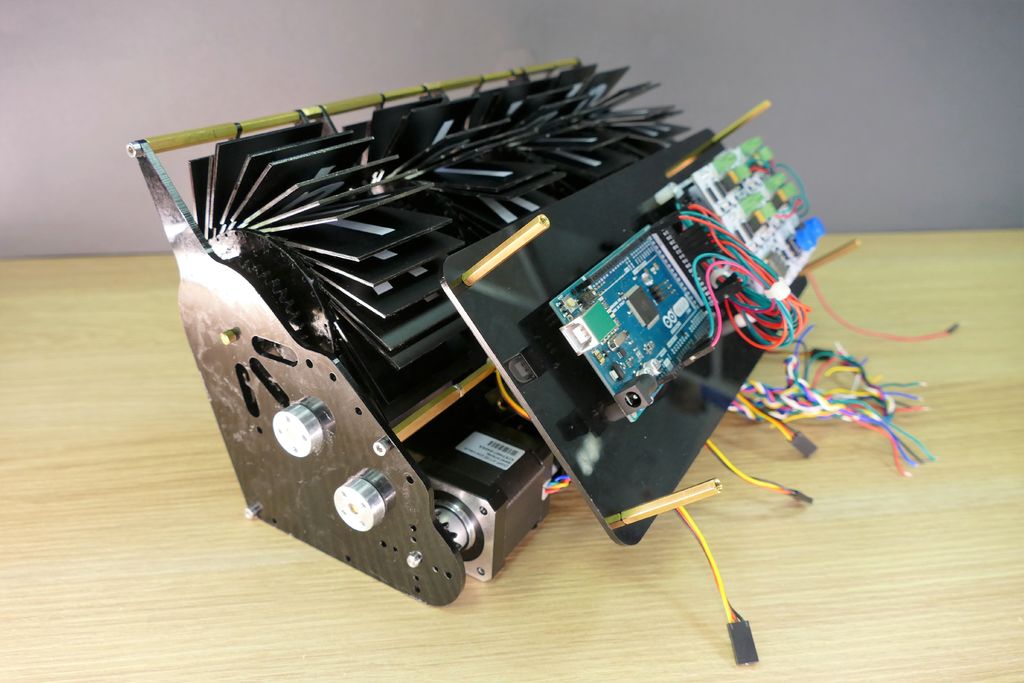
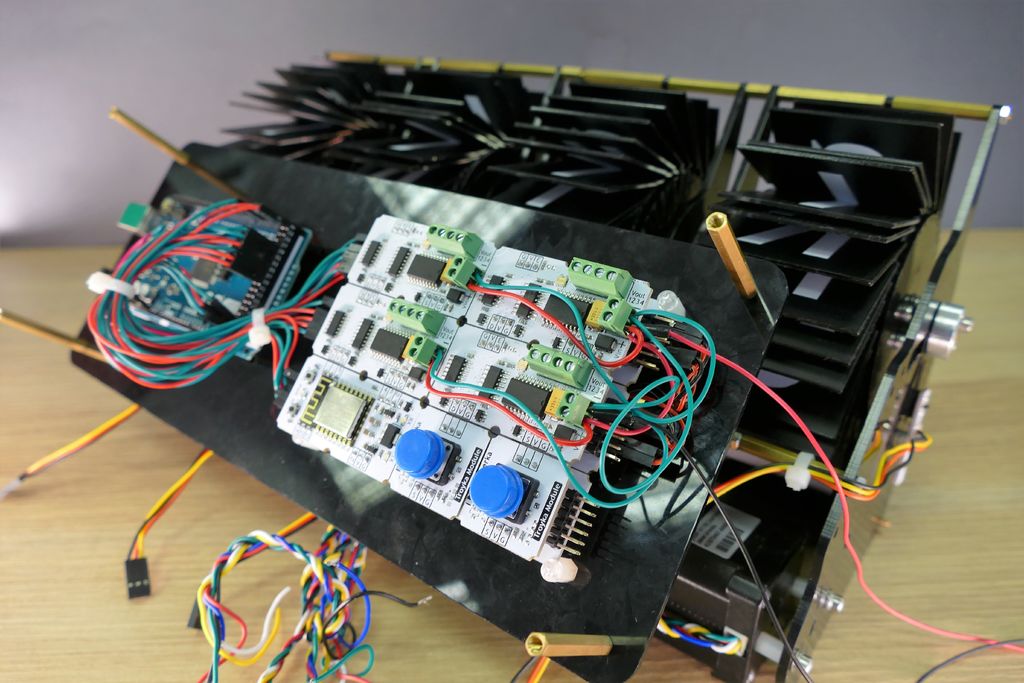

電子
為了制作電子產(chǎn)品,我使用了“Troyka”模塊(圖2)。這些模塊不需要焊接,允許您簡單快速地對任何設(shè)備進(jìn)行原型設(shè)計(jì)。請注意,您不必使用與我使用的模塊相同的模塊。您可以使用任何其他控制板和任何其他防護(hù)罩或模塊。
1。 Arduino mega 2560 - 1件。
為了控制顯示器我使用的是Arduino Mega 2560.它有很多數(shù)字端口和足夠的閃存來存儲程序代碼。
2。 “Troyka”墊 - 3件。
“Troyka”墊用于連接“Troyka”模塊而無需焊接。
3。 “Troyka”ESP 8266盾牌 - 1件。
該模塊基于ESP12,用于通過WiFi連接互聯(lián)網(wǎng)并從API中提取數(shù)據(jù)。該模塊已經(jīng)將電壓從3.3 V邏輯轉(zhuǎn)換為5V,并且與Arduino電路板兼容。
4。 “Troyka”步進(jìn)護(hù)罩 - 4件。
用于操作一個(gè)雙極步進(jìn)電機(jī)。該模塊允許您打開和關(guān)閉電機(jī),設(shè)置旋轉(zhuǎn)方向,以及調(diào)整電機(jī)速度。它可以控制步進(jìn)電機(jī)電壓4.5-25 V,電流高達(dá)600 mA。
5。 “Troyka”按鈕盾 - 2件。
PCB上的瞬時(shí)按鈕適合“Troyka”墊。我用了幾個(gè)按鈕來手動控制顯示器。
6。用于原型制作的電線。
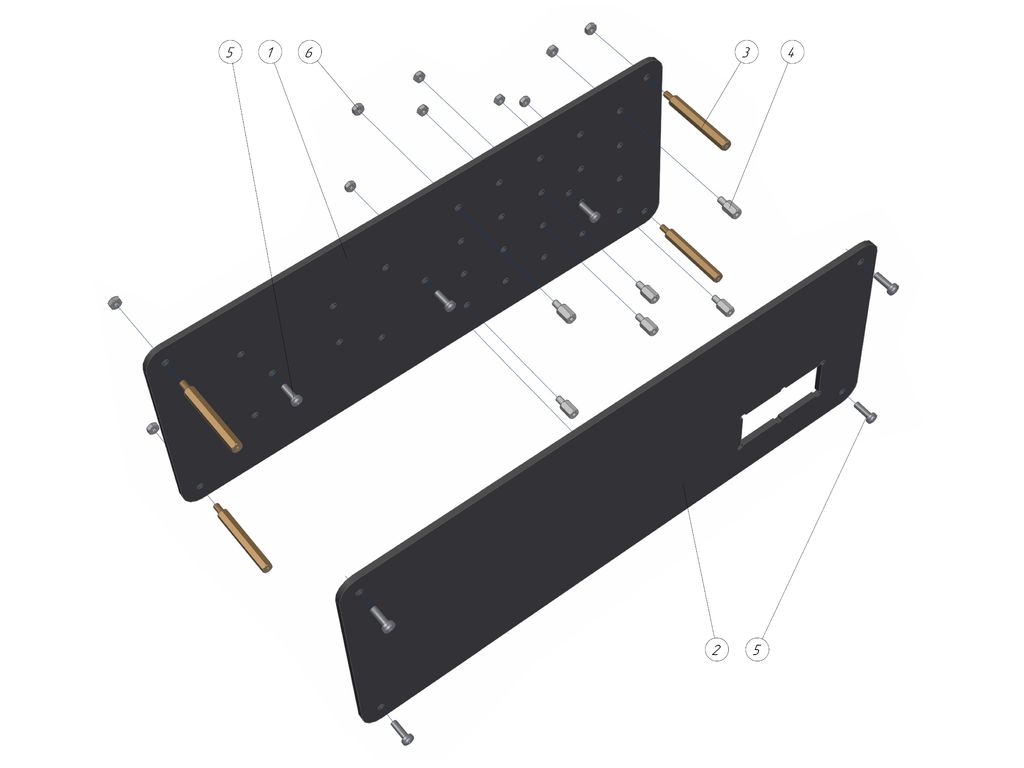
材料清單
1。有機(jī)玻璃背板3毫米 - 1件。
2。有機(jī)玻璃前面板3mm - 1件。
3。 PCB六角支架M3公母 - 母 - 母40mm長 - 4件。
4。 PCB尼龍六角支架M3公母 - 長8mm - 數(shù)量取決于您的電子產(chǎn)品類型。
5。螺釘M3(DIN7985/DIN 84/DIN 912)10毫米長度 - 7件。
6。六角螺母M3(DIN 934) - 4件以上。數(shù)量取決于您的電子產(chǎn)品類型。
準(zhǔn)備
可選:
在后面的有機(jī)玻璃面板(位置1)上鉆3-3.5mm的孔,以安裝您擁有的電子元件。
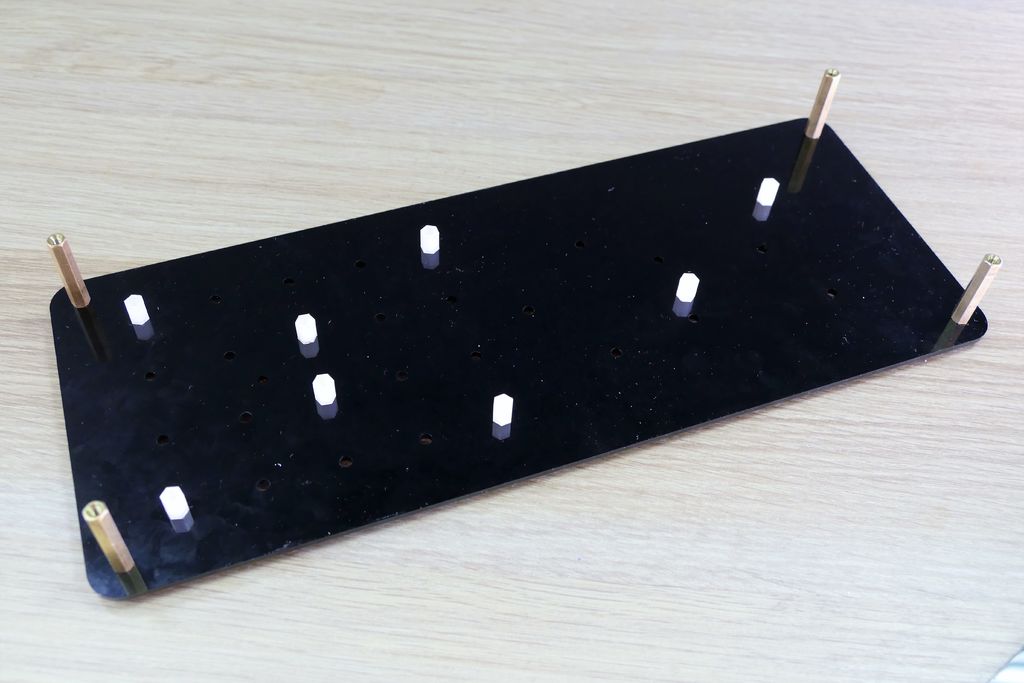
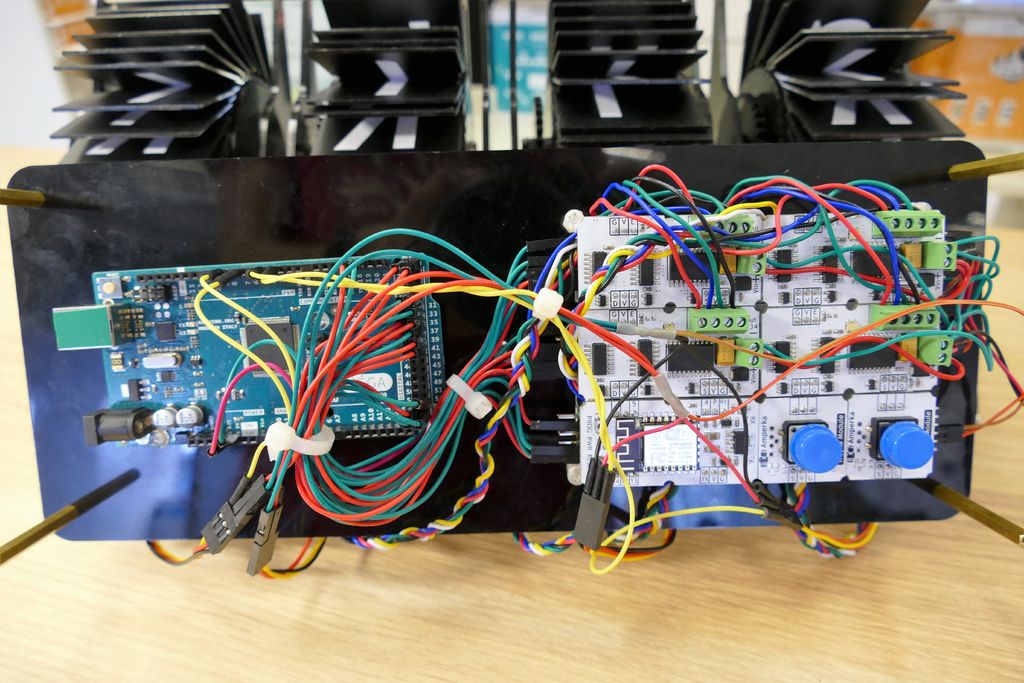
裝配過程
使用螺母(位置6)或螺釘(如果有)將四個(gè)支座(位置3)擰到后面板(位置1)女性對峙。
對于電子模塊,使用螺母(位置6)將尼龍支架(位置4)擰到后面板(位置1)。/li》
使用螺絲(位置5)將后面板(位置1)安裝到顯示器上(圖6,圖7)。
將Arduino板和屏蔽層安裝到后面板(位置1)并用電線連接所需的引腳。
連接線路跟蹤器傳感器Arduino板。
將步進(jìn)電機(jī)與步進(jìn)驅(qū)動器模塊連接。
組合屏蔽電機(jī)電源使用電線將其帶到面板外面。
使用螺絲(pos)用前面板(pos.2)蓋住電子元件.5)。
第12步:與Weather API的互動。
選擇API
機(jī)制已完成,是時(shí)候選擇天氣API了。我希望顯示器每半小時(shí)更新一次天氣信息。
全球網(wǎng)上有很多服務(wù)宣布天氣:AccuWeather,F(xiàn)orecast.io,AerisWeather,OpenWeatherMap,WeatherBug,World Weather Online等
我選擇了AccuWeather API。它具有用戶友好的界面和精確的文檔。它可以顯示整個(gè)地球和幾乎任何城市的天氣。但是,它不是免費(fèi)的。單個(gè)API密鑰的有限但免費(fèi)試用是每天50個(gè)呼叫。這足以讓半小時(shí)更新。
獲取密鑰
1。在網(wǎng)站上注冊。檢查您的電子郵箱。編輯您的個(gè)人資料并登錄該網(wǎng)站。
2。按“我的應(yīng)用程序”并創(chuàng)建一個(gè)新的天氣應(yīng)用程序。為應(yīng)用命名。將API用于“其他”的位置設(shè)置,并選擇C ++編程語言。
3。打開“我的應(yīng)用”,然后打開您創(chuàng)建的應(yīng)用并獲取API密鑰。
看起來(此密鑰不真實(shí)):
UrWtYw3y5A8DaFcJfMhQmSpUsXuZw4z6B8E
將其寫下來并保存在您的計(jì)算機(jī)上的某個(gè)地方。不要將此密鑰提供給任何人。
查找城市ID
您應(yīng)該知道您想知道天氣的城市ID 。我住在莫斯科,所以我需要莫斯科城市ID。
1。轉(zhuǎn)到“API參考” - 》“位置API”。
2。由于莫斯科是最大的城市之一,我選擇“列表 - 》獲取 - 》頂級城市名單”。
3。在“資源網(wǎng)址”中輸入城市數(shù)量。
4。在“查詢參數(shù)”中輸入您的API密鑰。
5。發(fā)送請求。
6。在回復(fù)中找到必要城市的ID。
“Version”: 1,
“Key”: “294021”,
“Type”: “City”,
“Rank”: 10,
“LocalizedName”: “Moscow”,
“EnglishName”: “Moscow”,
“PrimaryPostalCode”: “”,
“Region”: {
“ID”: “ASI”,
“LocalizedName”: “Asia”,
“EnglishName”: “Asia”
7。莫斯科ID是294021.記下您的ID,不要忘記。
測試API
讓我們在XOD中使用之前測試API環(huán)境并了解莫斯科目前的天氣。
1。轉(zhuǎn)到“API參考” - 》“預(yù)測API” - 》“每小時(shí)預(yù)測1小時(shí)”。
2。在“資源URL”中輸入城市ID。對于我的示例,URL看起來像:
http://dataservice.accuweather.com/forecasts/v1/hourly/1hour/294021
3。輸入“查詢參數(shù)”并發(fā)送請求。
4。如果你做的一切正確,你會在回復(fù)中得到這樣的信息:
“DateTime”: “2018-08-03T18:00:00+03:00”,
“EpochDateTime”: 1533308400,
“WeatherIcon”: 2,
“IconPhrase”: “Mostly sunny”,
“IsDaylight”: true,
“Temperature”: {
“Value”: 27.6,
“Unit”: “C”,
“UnitType”: 17
這是我們將在XOD中使用的信息。
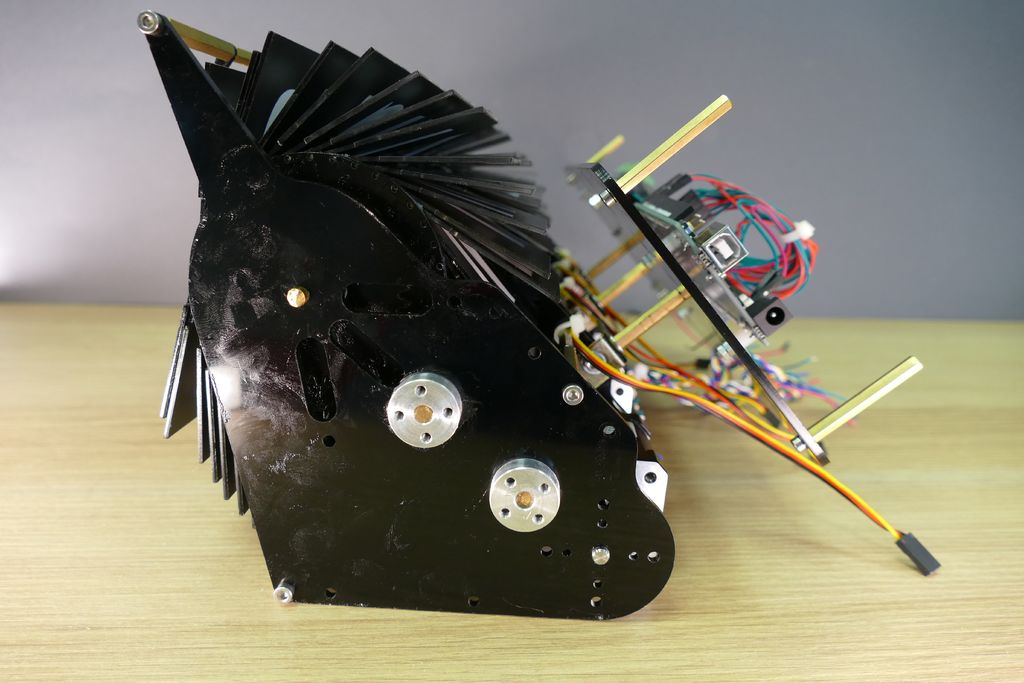
步驟13:顯示操作原理。
傳輸率
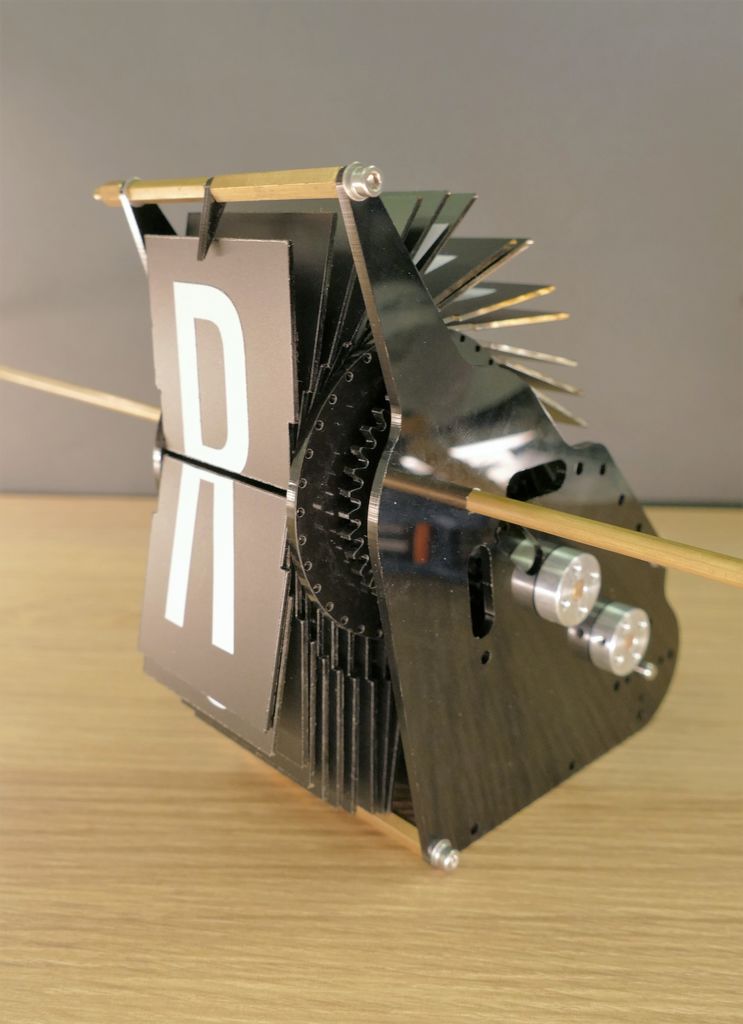
翻轉(zhuǎn)支架有36個(gè)翻轉(zhuǎn),它與36個(gè)齒的大齒輪連接。兩個(gè)中齒輪都有24個(gè)齒。驅(qū)動小齒輪(小齒輪)的齒數(shù)為14.通過除以齒數(shù)(36/24 * 24/14),我們得到傳動比。這是1:2,571。這意味著翻轉(zhuǎn)支架盤的完整轉(zhuǎn)動等于驅(qū)動小齒輪的2,571圈。對于1次翻轉(zhuǎn),驅(qū)動小齒輪必須為0,0714轉(zhuǎn)(2,571/36)
Nema 17步進(jìn)電機(jī)的步進(jìn)為1,8度。這意味著1個(gè)驅(qū)動小齒輪轉(zhuǎn)動等于200個(gè)步進(jìn)電機(jī)步進(jìn)(360/1,8)。將乘以200乘以0.0714,我們得到將支架旋轉(zhuǎn)1次翻轉(zhuǎn)的步數(shù)。它是14,285。
顯示操作
每個(gè)數(shù)字的操作原理相同。首先,翻蓋架開始旋轉(zhuǎn)。它旋轉(zhuǎn)直到數(shù)字線傳感器檢測到支架盤上的白色條帶。旋轉(zhuǎn)停止,翻轉(zhuǎn)支架設(shè)置為默認(rèn)位置。程序知道當(dāng)前符號,因?yàn)槲覀兺ㄟ^將條帶粘貼到磁盤的正確位置來配置它。在我的情況下,“A”字母設(shè)置為默認(rèn)持有人位置。
符號已編號,我們知道它們的順序。程序?qū)⒎枖?shù)乘以14,5,并為特定符號的電機(jī)提供所需的步數(shù)。
例如,默認(rèn)字符“A”的編號為0,字符“F”的編號為5.要切換到符號“F”,電機(jī)會執(zhí)行(14,285 * 5)71步。步數(shù)舍入為最接近的整數(shù)。
步驟14:制作XOD程序。索引節(jié)點(diǎn)。
我決定使用XOD環(huán)境對顯示進(jìn)行編程。 XOD非常適合快速原型制作。
如果您以前從未使用過XOD,我強(qiáng)烈建議您在編程設(shè)備之前閱讀一些教程和練習(xí)。
我發(fā)布了圖書館“gabbapeople/iot-split-flap-display“包含顯示控件所需的節(jié)點(diǎn)和補(bǔ)丁。您可以在XOD網(wǎng)站上找到庫描述。
某些節(jié)點(diǎn)是從已經(jīng)存在的節(jié)點(diǎn)創(chuàng)建的,而有些節(jié)點(diǎn)是從頭開始編寫的。在XOD中,自定義節(jié)點(diǎn)是用C ++編寫的。接下來,我不會描述C ++代碼,而只是解釋顯示操作的基本原理并簡要說明節(jié)點(diǎn)。
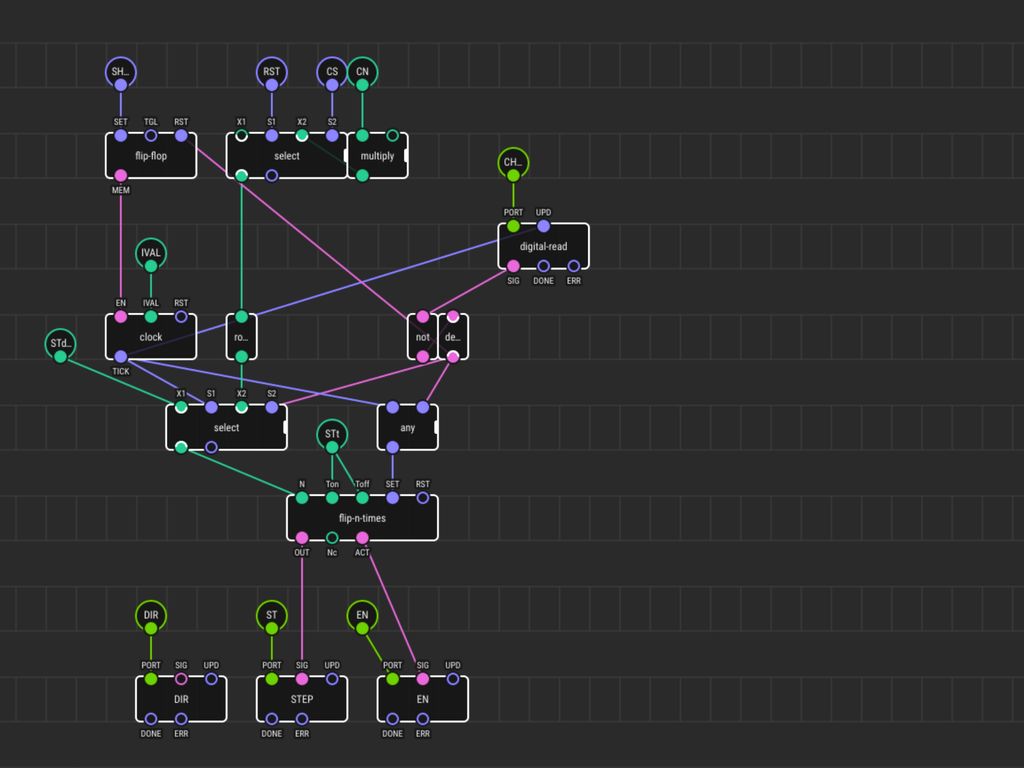
索引節(jié)點(diǎn)
此節(jié)點(diǎn)負(fù)責(zé)控制步進(jìn)驅(qū)動器模塊并檢測默認(rèn)的翻轉(zhuǎn)支架位置。它內(nèi)部沒有自定義節(jié)點(diǎn),完全由核心節(jié)點(diǎn)組成。
我使用的“Troyka”步進(jìn)驅(qū)動模塊有3個(gè)輸入引腳。 “DIR”設(shè)置方向,“STEP”負(fù)責(zé)步驟,“EN”打開或關(guān)閉電機(jī)。
要邁出一步,需要更改邏輯0 “STEP”端口為1.這些更改的數(shù)量負(fù)責(zé)步驟數(shù)。在XOD中有一個(gè)合適的節(jié)點(diǎn)“翻轉(zhuǎn)n次”,可以輕松地進(jìn)行這些更改。
只有當(dāng)數(shù)據(jù)序列發(fā)送到“STEP”時(shí),電機(jī)才會在“EN”處打開。銷。這樣做是為了消耗更少的能量并使步進(jìn)電機(jī)可靠。
“數(shù)字讀取”和“延遲”節(jié)點(diǎn)用于發(fā)信號通知翻蓋上的白色條紋。使用“not”節(jié)點(diǎn),您可以切換線傳感器的邏輯信號。在我的例子中,如果表面的顏色是黑色,數(shù)字線傳感器輸出“True”,如果顏色是白色,則輸出“False”。
輸入引腳:
SHOW (脈沖) - 觸發(fā)新角色演出的脈沖輸入。
RST (脈沖) - 用于重置數(shù)字的脈沖。它在找到默認(rèn)位置為0后設(shè)置電機(jī)步數(shù)。
CS (脈沖) - 用于設(shè)置特定字符的電機(jī)步數(shù)。
CN (數(shù)字) - 要顯示的字符數(shù)。它被乘以14,285來設(shè)置電機(jī)步數(shù)。
STdef (數(shù)字) - 設(shè)置翻轉(zhuǎn)架旋轉(zhuǎn)速度的步驟在白條試圖期間。默認(rèn)設(shè)置為15.
STt (數(shù)字) - 將“0”和“1”值發(fā)送到“STEP”之間的延遲步進(jìn)驅(qū)動模塊的引腳。默認(rèn)值為0.003秒。
IVAL (數(shù)字) - 指定向步進(jìn)驅(qū)動程序模塊發(fā)送“0”和“1”值的頻率。
DIR (端口) - 控制器板上的一些端口,步進(jìn)驅(qū)動器模塊的“DIR”引腳
已連接。
ST (端口) - 控制器板上的一些端口,其“STEP”引腳步進(jìn)驅(qū)動器模塊已連接。
EN (端口) - 控制器板上的一些端口,其“EN”引腳步進(jìn)驅(qū)動器模塊已連接。
CHCK (端口) - 數(shù)字線路傳感器所連接的控制器板上的多個(gè)端口。
第15步:制作XOD程序。獲取天氣節(jié)點(diǎn)。
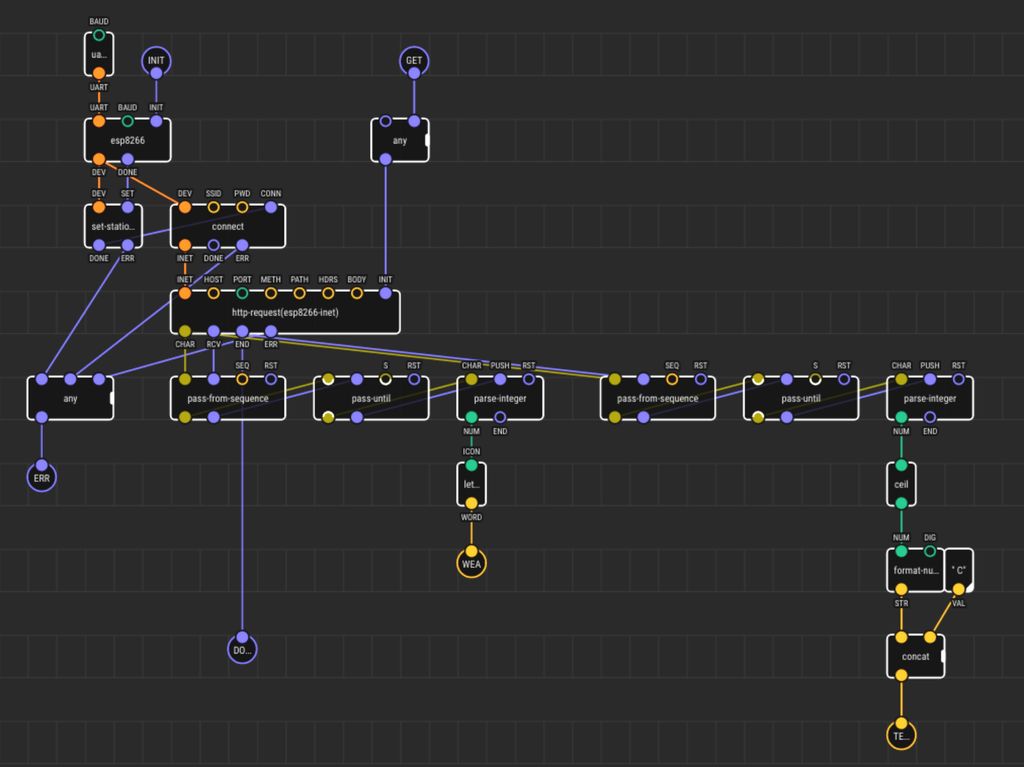
獲取天氣節(jié)點(diǎn)
此節(jié)點(diǎn)(圖2)是負(fù)責(zé)連接到Web,與API交互,獲取響應(yīng)和解析數(shù)據(jù)。
“uart-1” - 建立UART的節(jié)點(diǎn)控制器與ESP 8266 AT-modem模塊之間的連接。 “uart-1”表示控制器和調(diào)制解調(diào)器使用第一個(gè)HARDWARE序列交換數(shù)據(jù)。
“esp8266” - 該節(jié)點(diǎn)負(fù)責(zé)初始化和配置AT-modem模塊。
“set-station-mode” - 在站點(diǎn)模式下設(shè)置ESP8266的節(jié)點(diǎn)。
“connect” - 通過Wi-Fi建立互聯(lián)網(wǎng)連接的節(jié)點(diǎn)。您應(yīng)該配置它,輸入您要連接的網(wǎng)絡(luò)的名稱和密碼。
“http-request(esp8266-inet)” - 用于執(zhí)行HTTP請求并返回響應(yīng)的節(jié)點(diǎn)。使用參數(shù)配置它:
HOST - 對于AccuWeather API,地址為“dataservice.accuweather.com”。
PORT - 服務(wù)器正在偵聽“80”端口號。
METH - HTTP方法。對于獲取API數(shù)據(jù),它是“GET”。
PATH - 所請求資源的路徑。您可以在AccuWeather API網(wǎng)站上查找路徑,也可以將此路徑與您自己的API密鑰和CityID一起使用。
/forecasts/v1/hourly/1hour/294021?apikey=UrWtYw3y5A8DaFcJfMhQmSpUsXuZw4z6B8E%20&metric=true
接下來的兩個(gè)節(jié)點(diǎn)順序“pass-from-sequence”,“pass-untill”和“parse-integer”用于解析來自服務(wù)器的響應(yīng)。
解析天氣狀況
解析天氣狀況編號的服務(wù)器響應(yīng)的第一個(gè)順序。它被稱為“WeatherIcon”。 AccuWeather API可以對40種變體中的一種進(jìn)行天氣描述編碼。我們開始在服務(wù)器響應(yīng)中搜索序列“WeatherIcon”:
并解析數(shù)據(jù),直到“,”符號為整數(shù)值。帶有天氣描述和相應(yīng)值的表格在附件中。
解析溫度
第二個(gè)解析序列適用于當(dāng)前溫度。我們開始在服務(wù)器響應(yīng)中搜索序列
“Value”:
并解析數(shù)據(jù),直到“,”符號為整數(shù)值。將輸出整數(shù)值轉(zhuǎn)換為兩位數(shù)。使用“ceil”節(jié)點(diǎn)將其舍入為最小整數(shù),并使用“format-number”節(jié)點(diǎn)刪除額外的零。
為了更加清晰,我使用“concat”節(jié)點(diǎn)添加間距和“C”字符到溫度值并以字符串形式輸出結(jié)果。
字母圖標(biāo)到字節(jié)點(diǎn)
此自定義節(jié)點(diǎn)采用天氣數(shù)字并以字符串形式輸出四字符縮寫。
步驟16:制作XOD程序。最終。
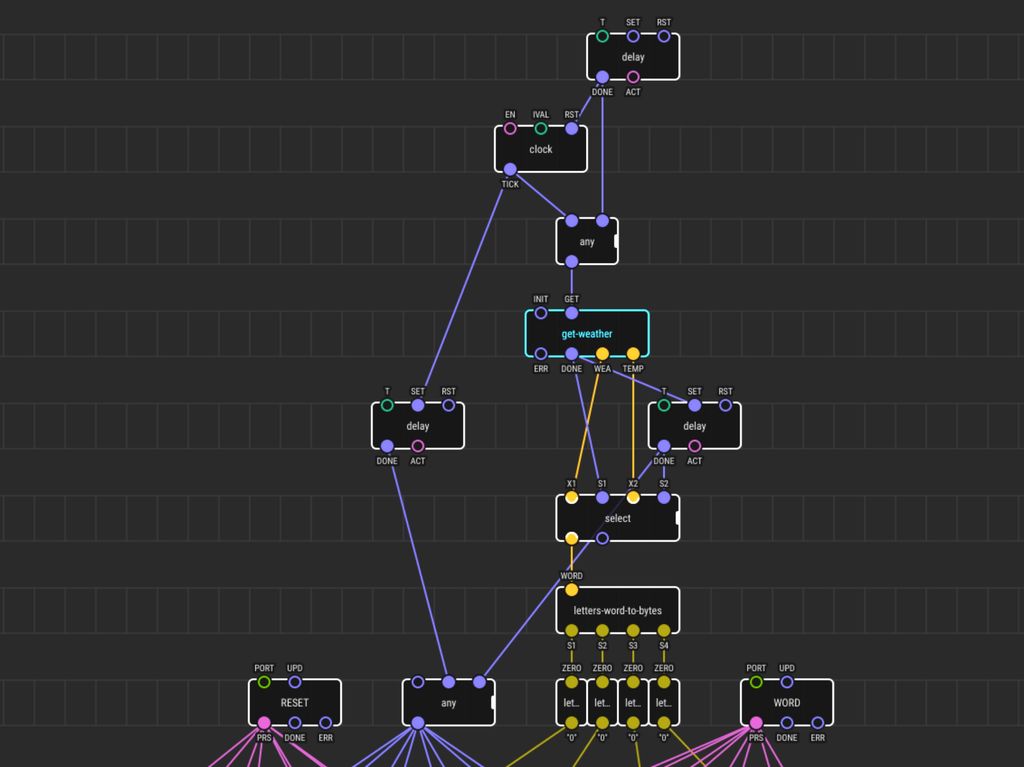
剩余的自定義節(jié)點(diǎn)說明
“字母字對字節(jié)”節(jié)點(diǎn)。此節(jié)點(diǎn)以字符串格式輸入四個(gè)字母的單詞,并以字節(jié)格式輸出四個(gè)字符。每個(gè)字符都被發(fā)送到其索引。
“l(fā)etter-zero-to-o”節(jié)點(diǎn)。此節(jié)點(diǎn)將輸入“0”字符更改為字母“O”。
“l(fā)etter-to-step-1”,“l(fā)etter-to-step-2”, “l(fā)etter-to-step-3”,“l(fā)etter-to-step-4”節(jié)點(diǎn)。這四個(gè)節(jié)點(diǎn)用于確定“索引”的字符數(shù)。每個(gè)索引都有自己的“字母到步”節(jié)點(diǎn)。這樣做是為了消除數(shù)字錯(cuò)誤,例如翻轉(zhuǎn)跳過或過度旋轉(zhuǎn)。
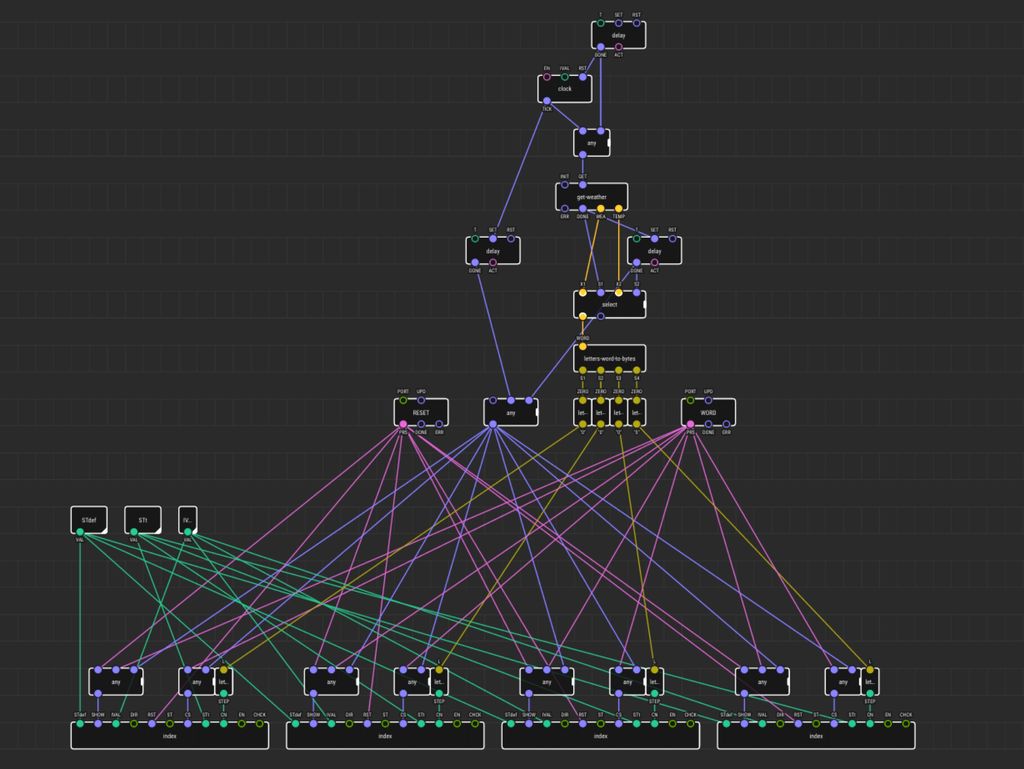
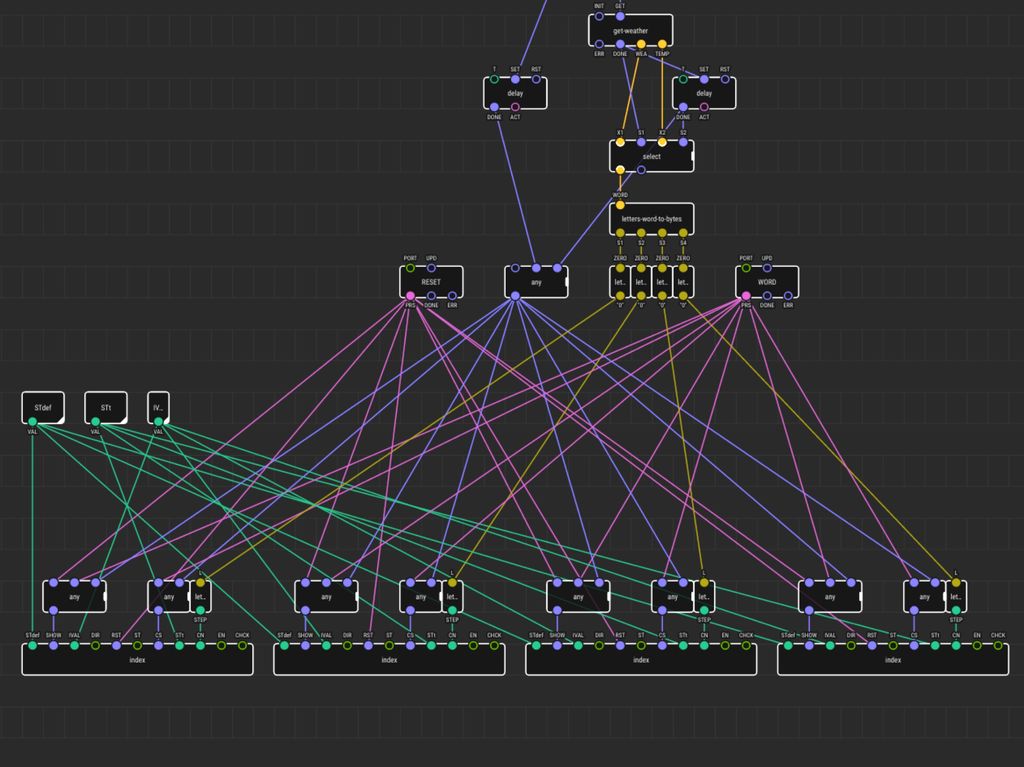
最終補(bǔ)丁
最終的XOD補(bǔ)丁在圖片。它包括:
四個(gè)“索引”節(jié)點(diǎn)。每個(gè)顯示數(shù)字都有自己的“索引”節(jié)點(diǎn),除了“STt”,“IVAL”和“STdef”常量外,還有自己的參數(shù)。
“get-weather”節(jié)點(diǎn)。/li》
“get-weather”節(jié)點(diǎn)之前的“clock”和“delay”節(jié)點(diǎn)。它們每半小時(shí)在啟動時(shí)產(chǎn)生一個(gè)脈沖。
“get-weather”和“l(fā)etters-word-to-bytes”之間的“延遲”和“選擇”節(jié)點(diǎn)“節(jié)點(diǎn)。這樣做是為了首先顯示天氣狀況和之后的溫度。
“字母字對字節(jié)”節(jié)點(diǎn)。
四個(gè)“字母從零到節(jié)點(diǎn)”。
四個(gè)“字母到步驟”節(jié)點(diǎn)。
RESET“按鈕”節(jié)點(diǎn)。我使用我的第一個(gè)按鈕將數(shù)字重置為默認(rèn)位置。
WORD“按鈕”節(jié)點(diǎn)。我用來重置最后顯示的單詞的第二個(gè)按鈕。
-
顯示器
+關(guān)注
關(guān)注
22文章
5072瀏覽量
141815
發(fā)布評論請先 登錄
嵌入式工業(yè)顯示器如何提升自動化設(shè)備的操作效率??
工業(yè)顯示器對比商用顯示器在使用時(shí)出現(xiàn)故障的處理方法有何不同?
顯示器視頻接口的ESD保護(hù)方案應(yīng)用 #顯示器 #視頻接口 #ESD保護(hù) #晶揚(yáng)電子

嵌入式工業(yè)級顯示器在環(huán)保垃圾柜設(shè)備中發(fā)揮著至關(guān)重要的作用

嵌入式工業(yè)級顯示器在環(huán)保垃圾柜設(shè)備中的作用
顯示器驅(qū)動板的具體作用
觸摸屏與傳統(tǒng)顯示器比較

顯示器HDR認(rèn)證

顯示器低藍(lán)光(ChinaMark)認(rèn)證






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論