 跳舞機器人LED燈的制作教程
跳舞機器人LED燈的制作教程
第1步:設計
從我的卡車拖車掛鉤上使用旗桿我知道這些東西是多么脆弱。用于旗桿的薄壁鋁管可以在正常的一天飛行兩個3X6-ish標志。在強風條件下,它可以將傷害放在桿子上。
因為我的項目將位于20英尺旗桿的頂部,我知道我必須保持盡可能輕,但也足夠堅固它可以存放在往來于卡車后部的地方。
我也知道它不會像10英尺高,因為它最終會破壞/折疊旗桿。
所以我做了一個行政決定,讓每個家伙都高2英尺。理想情況下,我希望將它們一個堆疊在另一個之前,但是預計接下來的接線混亂,我知道這樣做不會有效,所以三個機器人彼此相鄰就是要走的路。
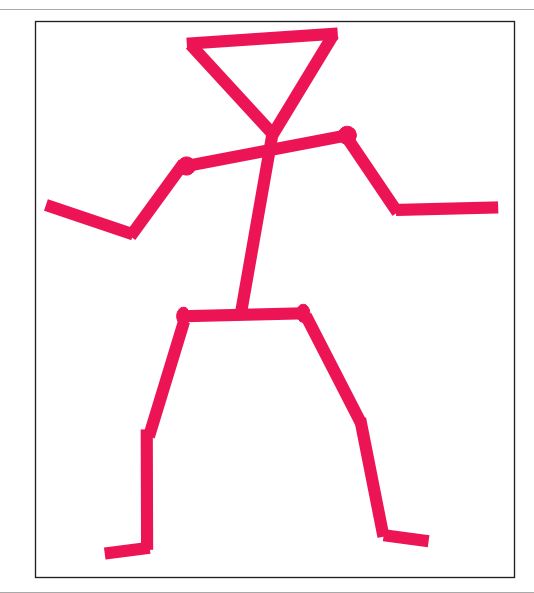
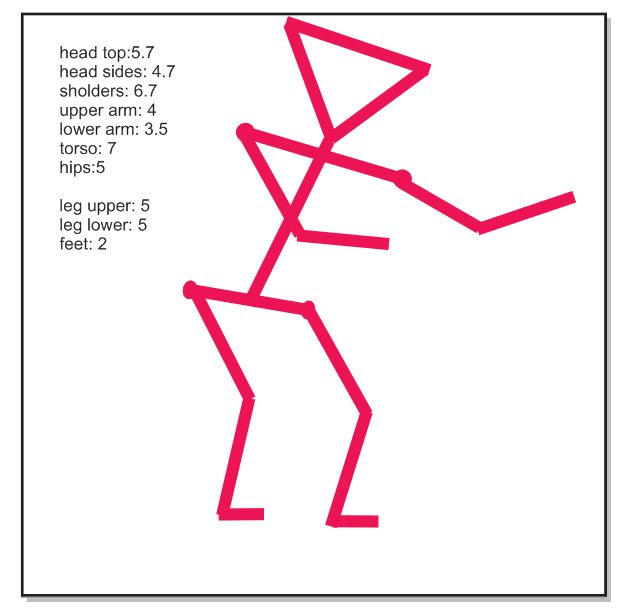
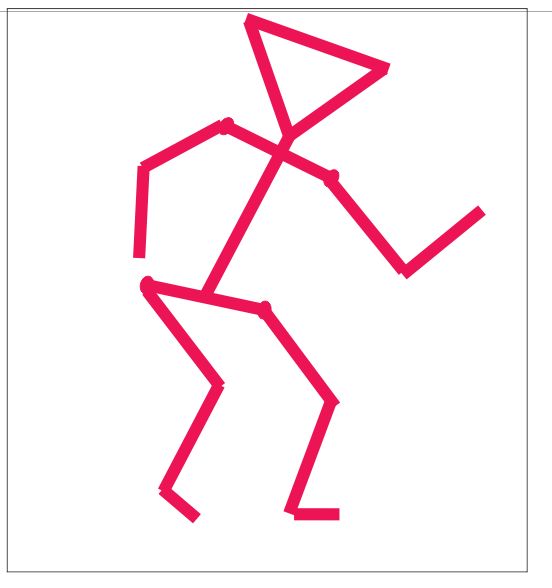
我畫了一個小棍子,弄出了胳膊和腿的比例,然后想出了一個棍子模型。從那里我做了三個不同的舉動。
完成設計!
第2步:Frame&Dudes的實現
我想讓它保持清淡,這樣對于花花公子的鏡架所以我選擇了1/8“鋼棒/線材。價格低廉,可彎曲,可釬焊,可焊接,可用。
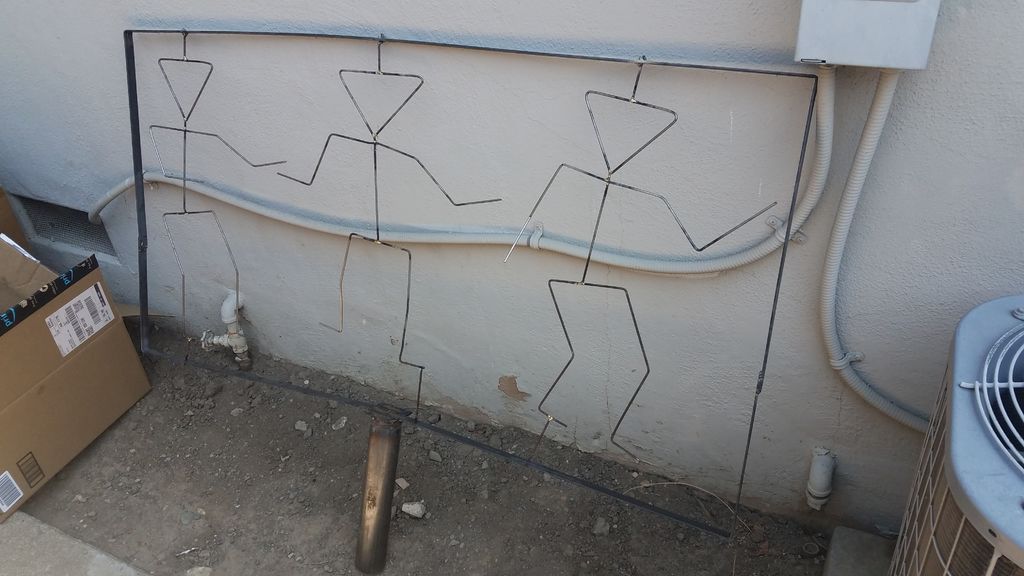
我將身體彎成一個副,彎曲肩膀/手臂并彎曲基本腿。
為了連接它們,我將它們釬焊在一起(我喜歡釬焊)同時焊接 - 非常低的熱量。
然后使用我打印出來的圖像,將它們彎曲成形。
將它們放在地上,并計算出我需要的框架尺寸
為框架選擇1/2 X 1/8扁鋼。使用兩件,四十九度彎曲和將框架焊接起來。
焊接頂部和底部的桿將花花公子固定在框架上。
順便說一下,這里的整潔并不算數。我在困難時期緊張(離開)對于這個事件而言,當然它在旗桿上方20英尺,所以沒有人能看到它靠近。
我在底部添加了一根管子,它將越過現有的旗桿和另外兩根小號支持,因為它是靈活的。我不能輕易地輕松解決前進/后退運動,但是并排添加了兩個額外的支柱,這些支柱連接到旗桿上,解決了這個問題。
即便如此 - 事情也很脆弱哎呀。但它也沒有很多表面積,所以我希望風不會對它產生太大影響。
第3步:使用的部件



非常基本的東西。 LED,arduino,繼電器板和許多拉鏈和收縮管。
此外,電線和連接器。我不打算包括連接器的圖片,因為我對使用它的笨拙和乏味感到非常不滿意。
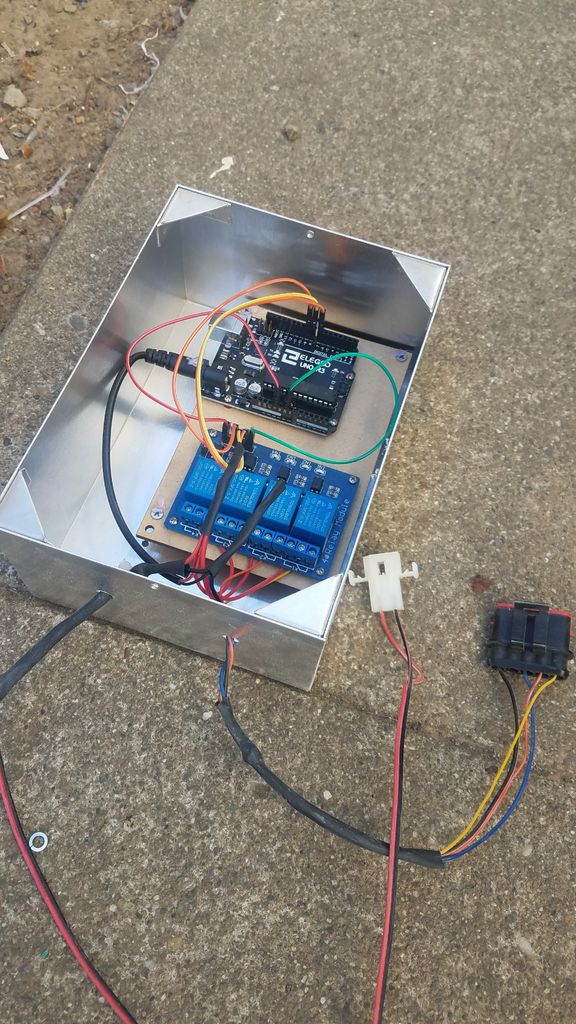
第4步:Arduino代碼和控制框
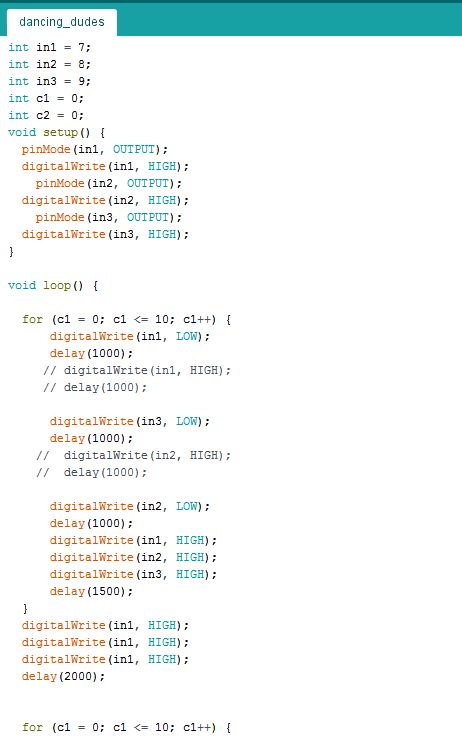
這里再次非常基本的東西。我需要打開每個人,在他們之間切換。
對于組裝我不要將電線擰入繼電器。過去這樣做我遇到了很多麻煩。繼電器板上的螺絲以某種方式放松,電線掉出來。我最終將Arduino的電線直接焊接到PC板上的焊盤上。
一旦它被接線并且在盒子里,我熱線將電線粘到繼電器板和Arduino上。我不想讓電線滑落,并且當它不工作時不得不在黑暗中拍攝它。
我激光切割一塊光纖板以連接Arduino和繼電器板然后將纖維板連接到鋁盒上。我做到了這一點 - 首先是因為我可以:-)然后,我想把纖維板上的所有電線和間距弄清楚,然后再將它放入鋁盒中,一旦它進入那里就很難做任何事情。
我并不擔心扣眼或其他什么。它會變得塵土飛揚,但它坐在卡車的后面。
POWER -
LED要12伏。 Arduino將在12v上運行,但它無法獲取LED。這就是為什么我有繼電器板。
我也是用12v汽車電池運行的,所以在我不得不擔心充電之前我有足夠的時間運行時間。
步驟5:將LED燈條連接到Dancing Dudes
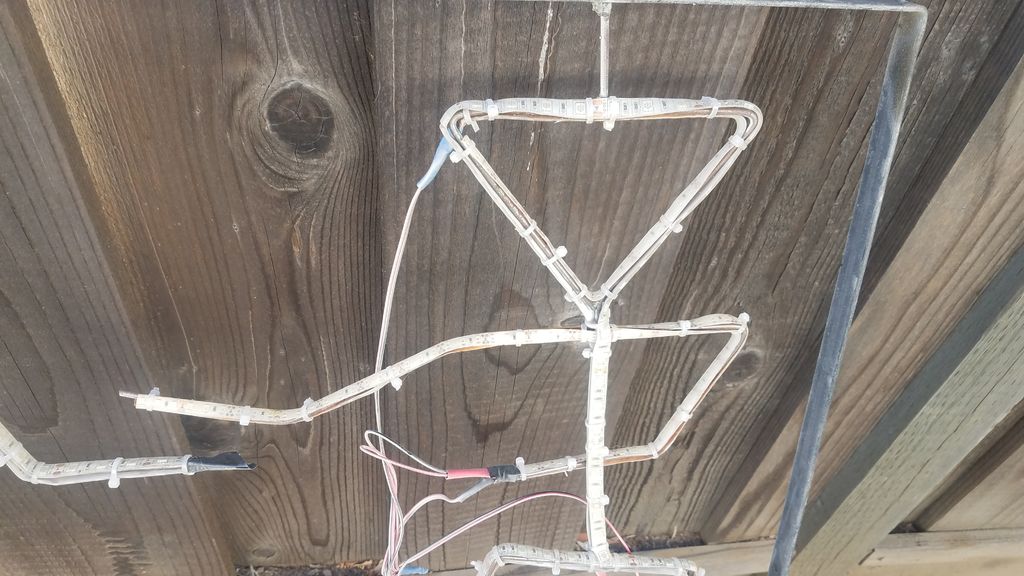



這是迄今為止最難和最乏味的部分。
LED是防水的。它們上面有一層透明的橡膠涂層
首先,我試圖將LED連接到花花公子的一側。夜間測試告訴我,我只能從一側看到LED - 呃。..我只是嘗試了一個人的一部分。..
所以 - 我試圖將LED連接到內部和外部正面和背面。事實證明,燈光足夠明亮,當它在極點上時,你不能告訴另一個燈光 - 讓它沿著一個街區離開。
因此背面的LED是粘性的 - 對于這個項目是USELESS。它不會粘在1/8“桿上。所以打包時間!很多很多很多領帶包裹!
如果你彎曲LED燈條太多 - 它們會斷裂 - 那么你就有了扔掉LED燈條的一部分,然后重新開始。..
我試著變得很棘手,盡可能多地制作一個條形蓋板。它有點工作。我最終連接了多個條帶注意 -
注意 -
對于這些LED燈條,許多人在連接器上出售無焊接夾 - 連接器基本上可以在帶狀末端為您提供兩根電線來連接電池對于防水條而言,這些都不能很好地工作。對于防水條,你必須切掉橡膠涂層,露出柔性LED條上的銅引線。在我開始研究技術之前,我發現了很多東西。如何剝去橡膠。即使這樣,連接器上的無焊鉗也會對它們進行任何拉動,它們必須完全貼合,以便它們落在接頭上.JUNK IMHO。所以我最后焊接了W ires到LED燈條和收縮包裝連接。這是您打開新盒子時會看到的連接。焊接。..。
每個連接都經過熱縮,再次對多個連接進行熱處理。它將在元素中出現,因此這有望幫助保持元素之外的連接。
第6步:最終裝配和連接



-
led燈
+關注
關注
22文章
1593瀏覽量
109313
發布評論請先 登錄
盤點#機器人開發平臺
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
開源項目!能夠精確地行走、跳舞和執行復雜動作的機器人—Tillu
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+初品的體驗
【開源項目】你準備好DIY一款功能強大的機器人了嗎?
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
Al大模型機器人
干貨!國產Cortex-A55人工智能實驗箱機械臂跳舞實驗案例






 工商網監
工商網監
評論