") Arduino自動(dòng)蜘蛛的制作
Arduino自動(dòng)蜘蛛的制作
步驟1:零件和工具
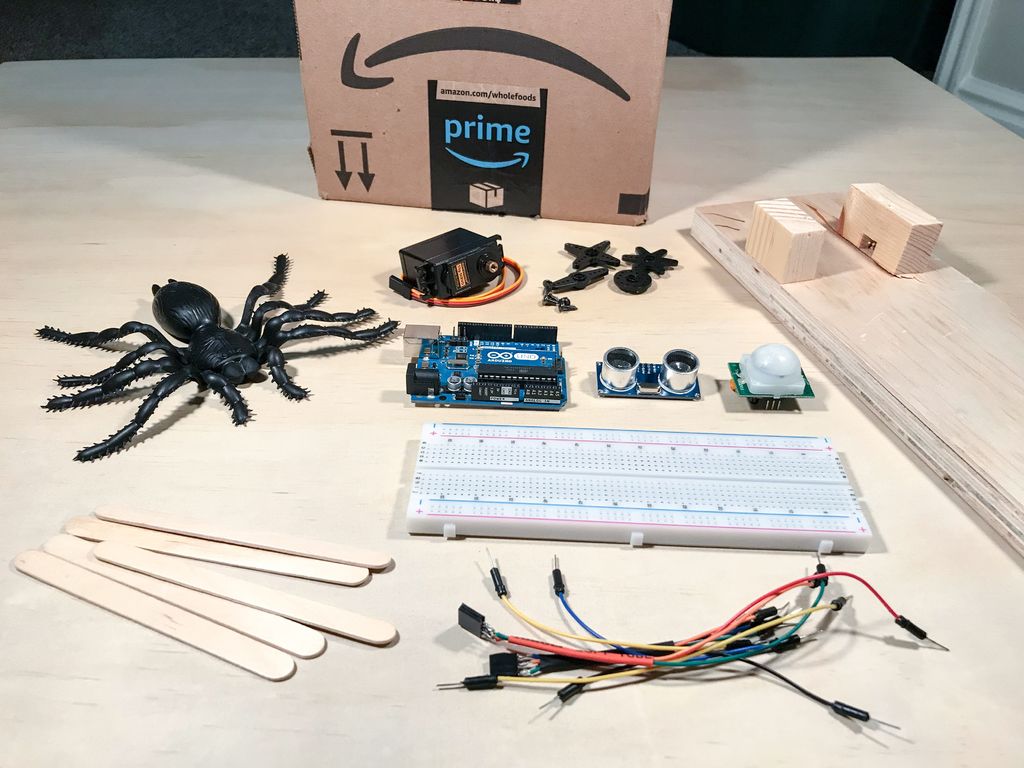
零件
假蜘蛛(美元店?)
伺服 - 亞馬遜/Aliexpress
A傳感器(選擇1 - 我在這個(gè)教學(xué)中顯示兩種方式)
超聲波傳感器 - 亞馬遜/Aliexpress
PIR傳感器 - 亞馬遜/Aliexpress
面包板和跳線(xiàn)
冰棒棒
廢木片
空包裝箱
工具
刀具或刀具
膠槍
鋸
木膠(或只是使用膠槍?zhuān)?/p>
步驟2:測(cè)試伺服,超聲波傳感器和PIR傳感器
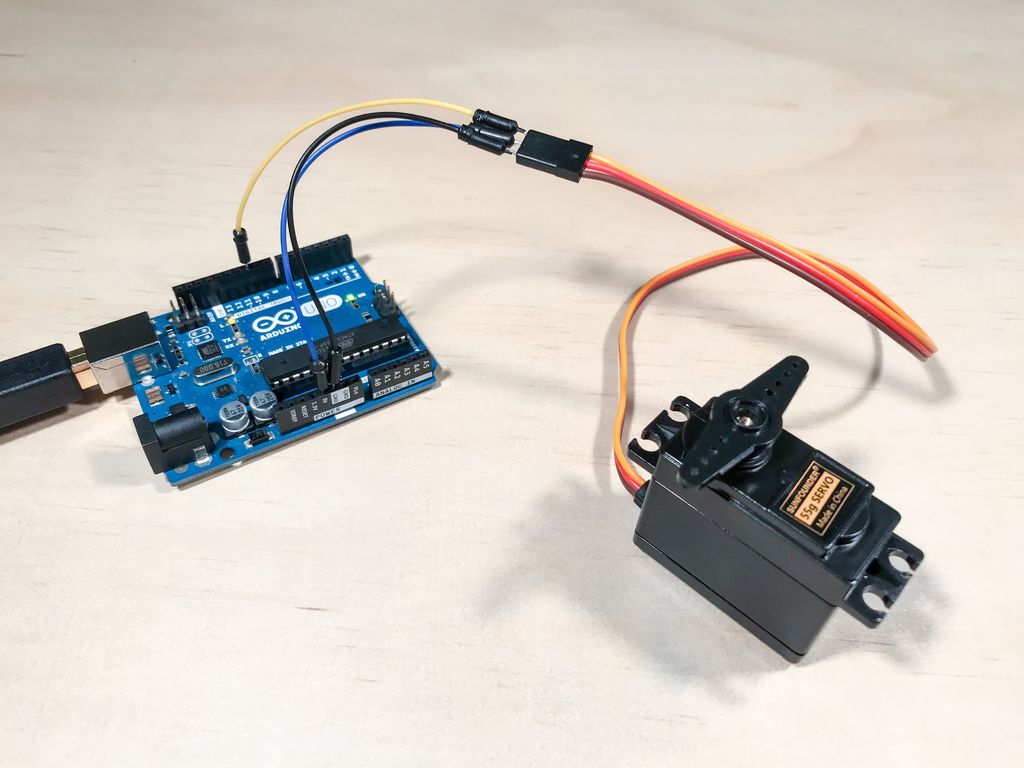
首先要做的事情。如果你像我一樣并且從未使用過(guò)伺服或這些傳感器,你可能需要快速閱讀一些教程來(lái)弄清楚它們是如何工作的。下面是我用來(lái)確保我的伺服和傳感器工作并完成工作的每個(gè)概述和示例。我還包括了我可以使用的簡(jiǎn)化測(cè)試代碼,以確保每個(gè)組件都有效。同樣,您可以選擇傳感器類(lèi)型(超聲波或PIR)。
伺服
Sunfounder的基礎(chǔ)伺服課程
Hobbytronics的示例代碼
我的簡(jiǎn)化測(cè)試代碼如下 - servo_test.ino
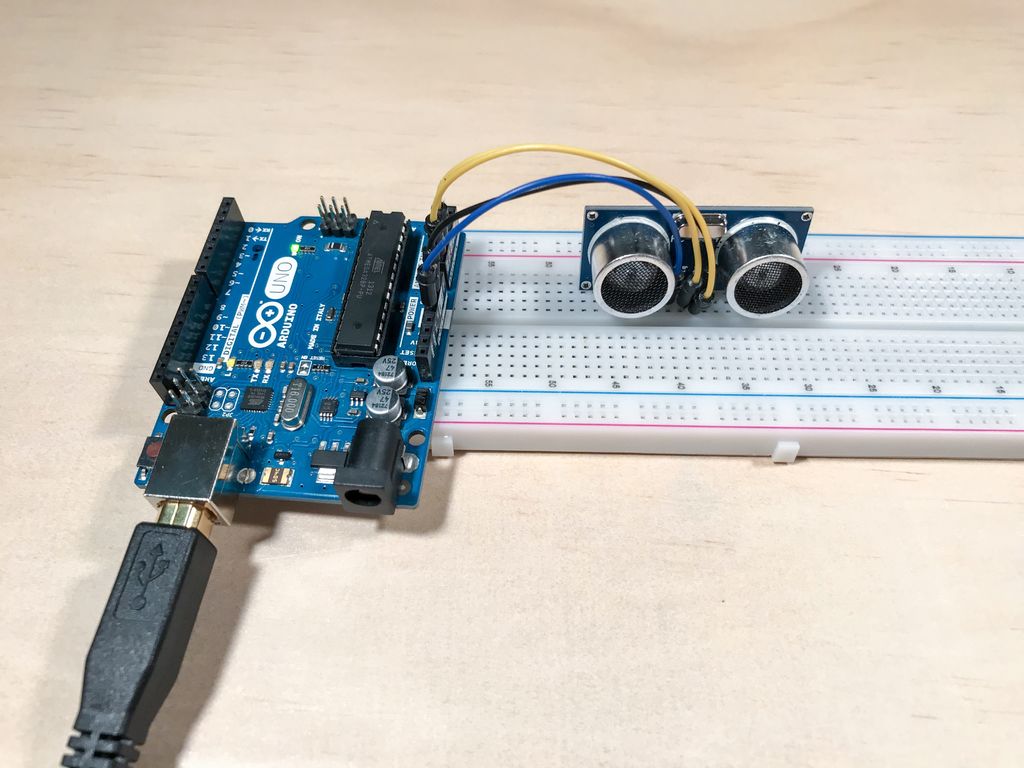
超聲波傳感器
如何在RandomNerdTutorials上運(yùn)行
RandomNerdTutorials同一頁(yè)面上的示例代碼
下面的簡(jiǎn)化測(cè)試代碼 - Ultrasonic_Distance_check.ino
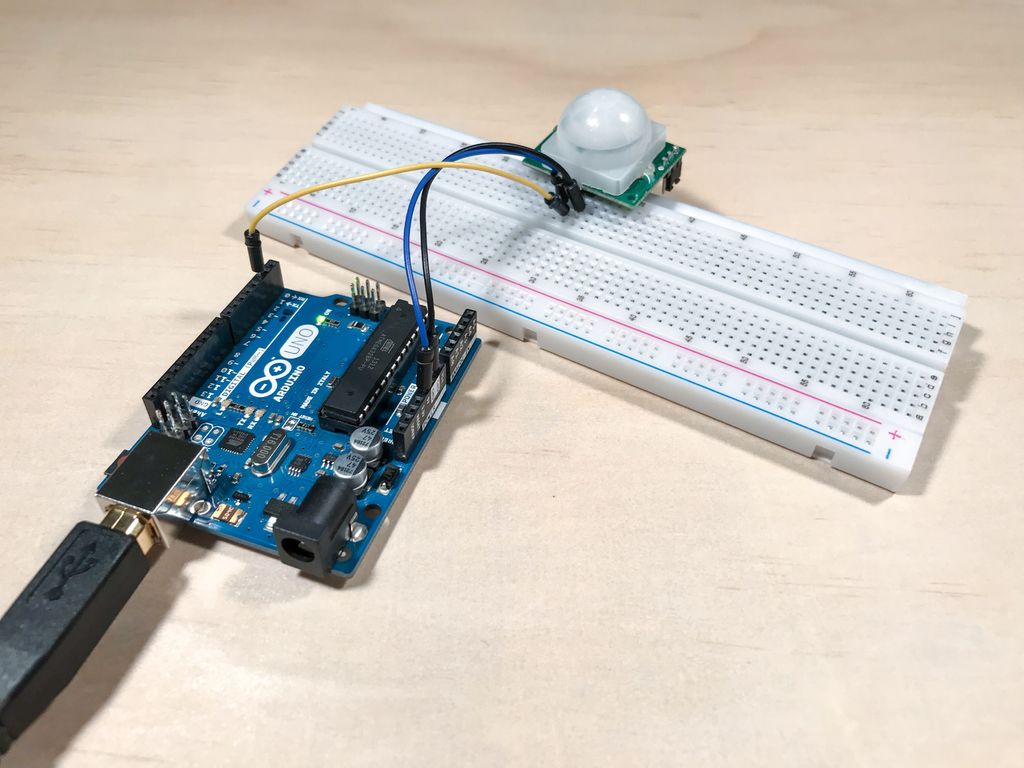
PIR傳感器
PIR如何在Adafruit上工作
關(guān)于Adafruit的示例代碼
我的簡(jiǎn)化測(cè)試代碼如下 - PIR_Sensor_Test.ino
第3步:組合主體
接下來(lái),根據(jù)您是選擇PIR還是超聲波路線(xiàn),下面是組合蜘蛛代碼,用于檢測(cè)進(jìn)入范圍的人,然后轉(zhuǎn)動(dòng)伺服器以將蜘蛛移出和移回。使用跳線(xiàn)和面包板將傳感器和伺服電路連接到Arduino,如下面的選項(xiàng)所示。
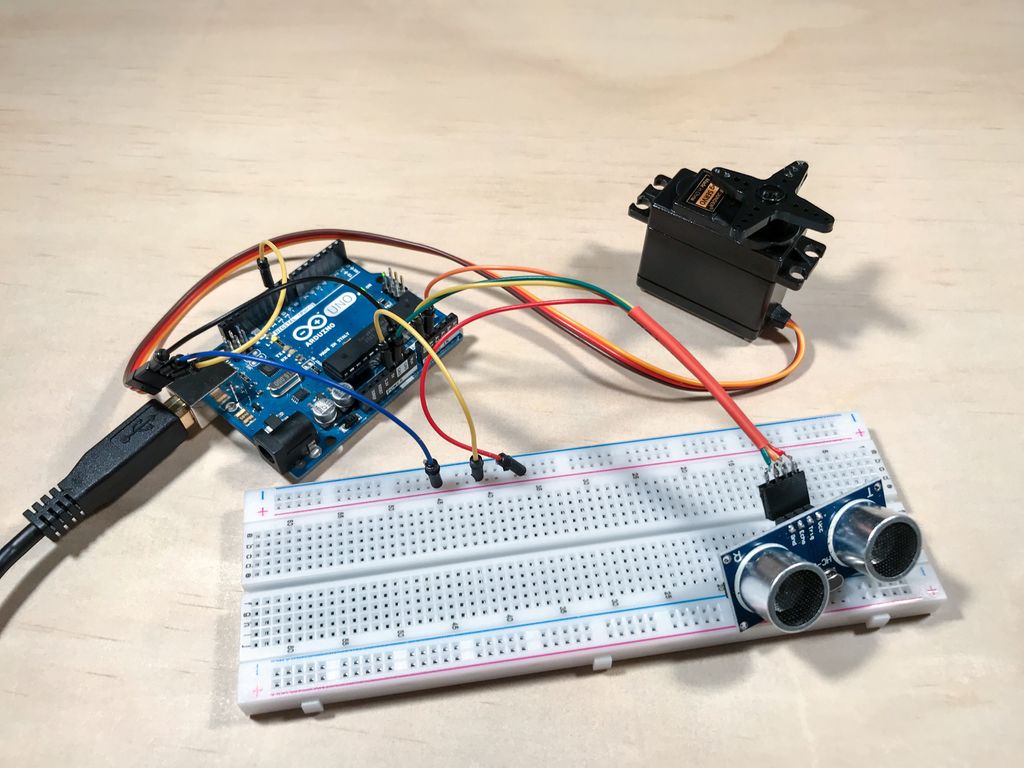
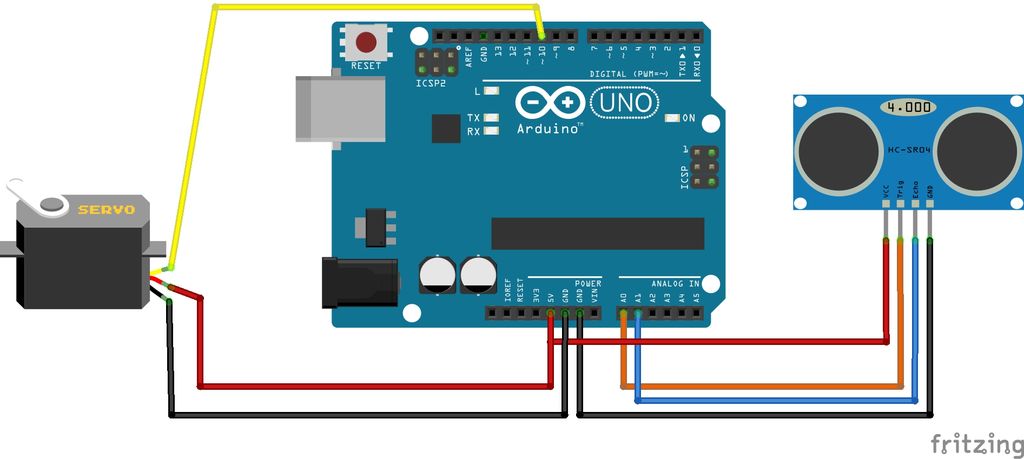
超聲波選項(xiàng)
此代碼檢查如果物體在一定距離范圍內(nèi)并召喚蜘蛛。
在代碼中,您可以將 triggerDistance 變量更改為接近或超過(guò)48英寸(4英尺),具體取決于您的具體情況。
將伺服連接到5v,Gnd和Pin 10
將超聲波傳感器連接到5v,Gnd,A0(Trig)和A1(Echo)
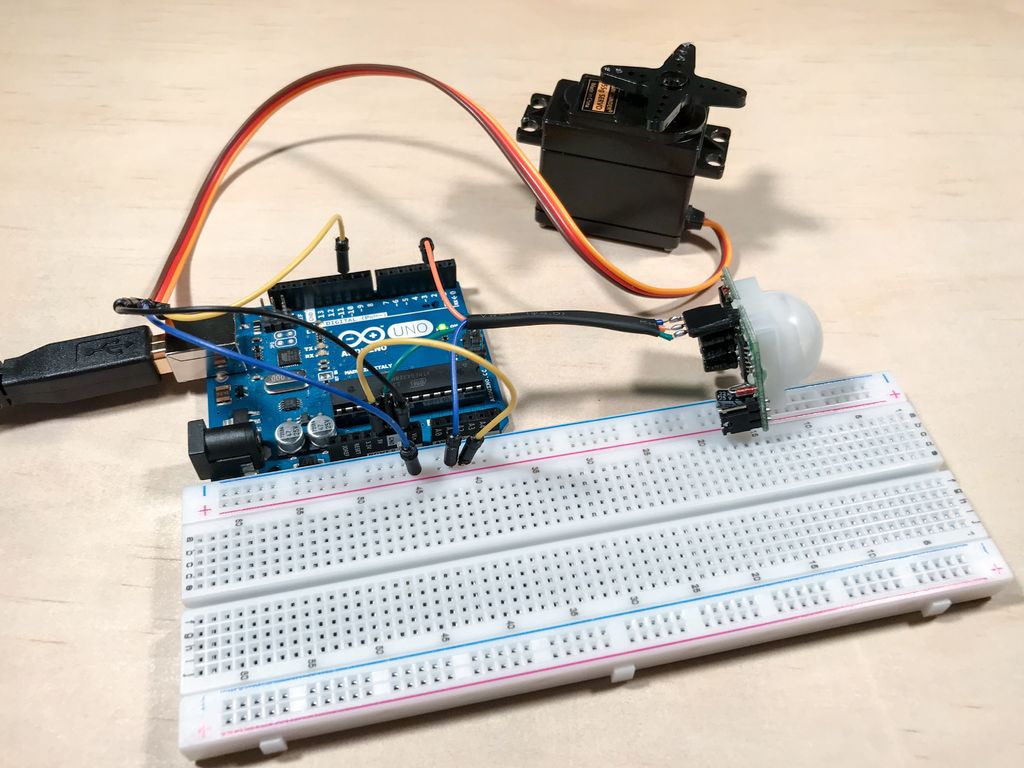
PIR選項(xiàng)
此代碼檢查對(duì)象是否在視野中并召喚蜘蛛。
對(duì)于PIR,您可以使用靈敏度電位計(jì)(通常為橙色)調(diào)整靈敏度,并向右旋轉(zhuǎn)以獲得最低靈敏度。
將伺服連接到5v,Gnd和Pin 10
將PIR傳感器連接到5v,Gnd和Pin 2
連接后在這兩個(gè)選項(xiàng)中,使用它來(lái)確保其正常工作,通過(guò)傳感器觸發(fā)伺服。
步驟4:為伺服創(chuàng)建基礎(chǔ)
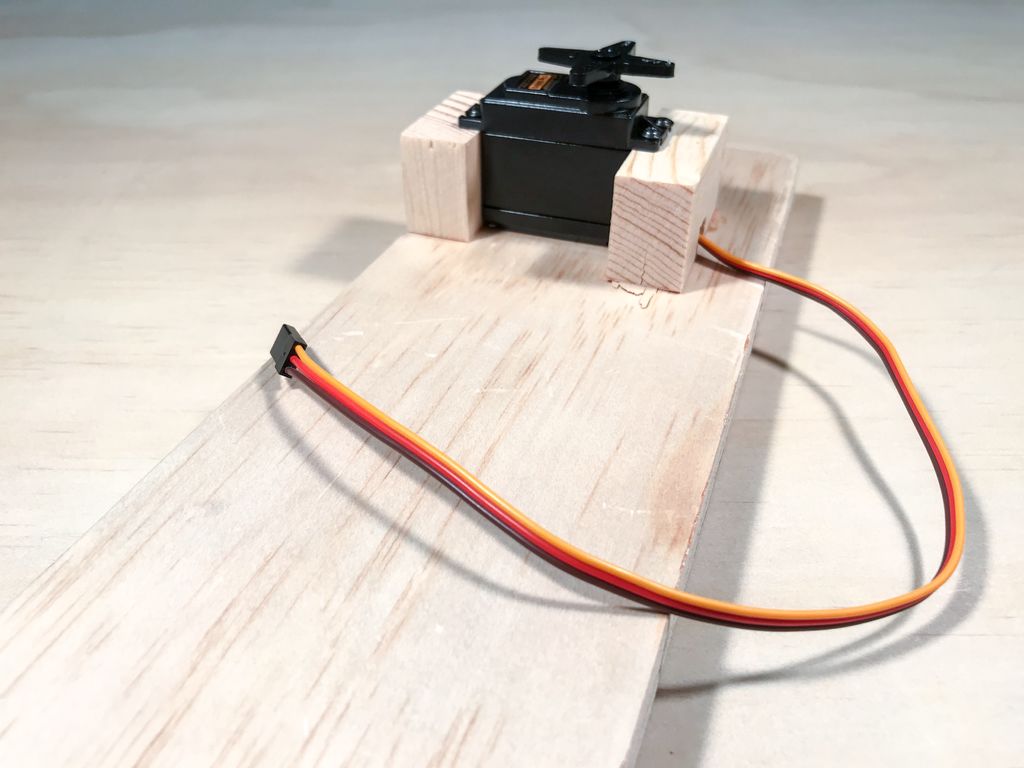

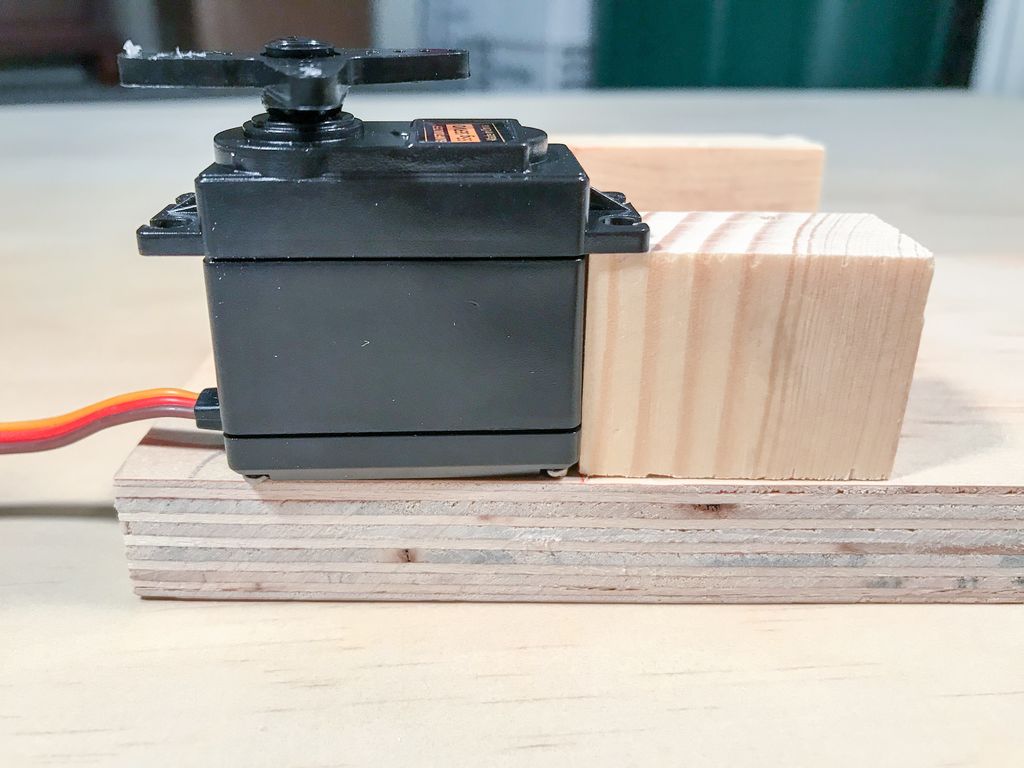
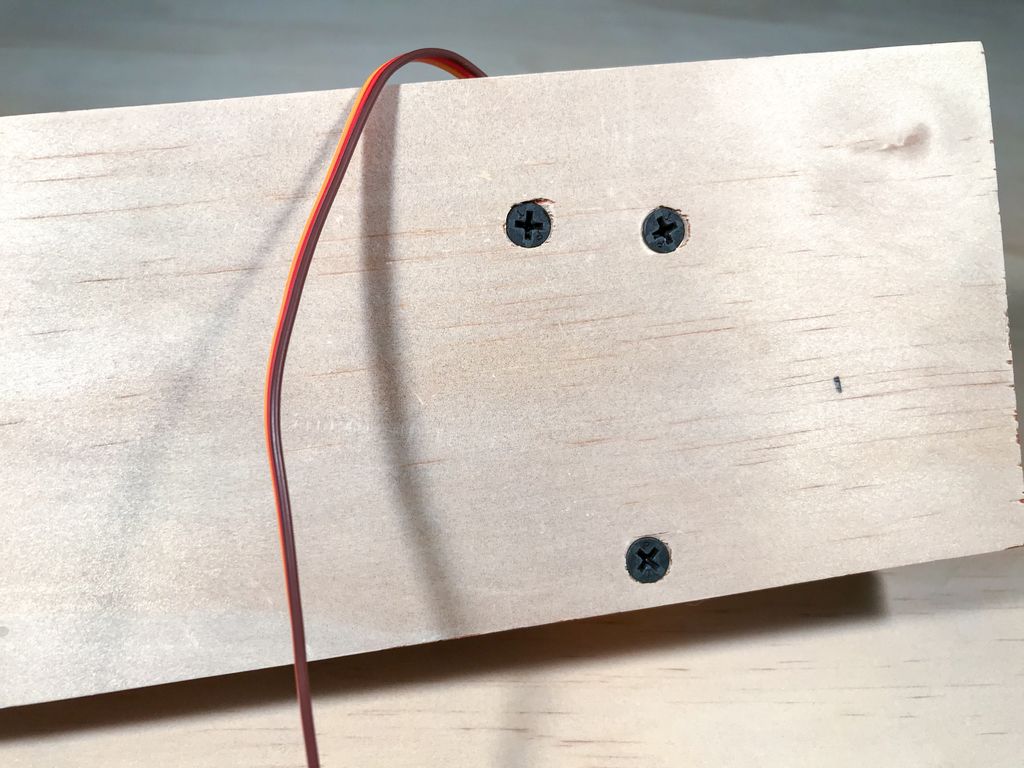
接下來(lái),您需要安裝伺服系統(tǒng),以便在擺動(dòng)蜘蛛的同時(shí)保持原位。為此,您將需要使用鋸將一塊廢膠合板或木板切割成約4“x 12”左右。然后,取兩個(gè)較小的1“x 2”木塊并將其切割成伺服高度的大小。從底部或木膠(或膠槍?zhuān)蓚€(gè)塊擰到一端的膠合板上,然后將伺服器擰入塊之間。
*注意:我還從一個(gè)塊的底部切出一個(gè)凹口,以便伺服電線(xiàn)通過(guò)。
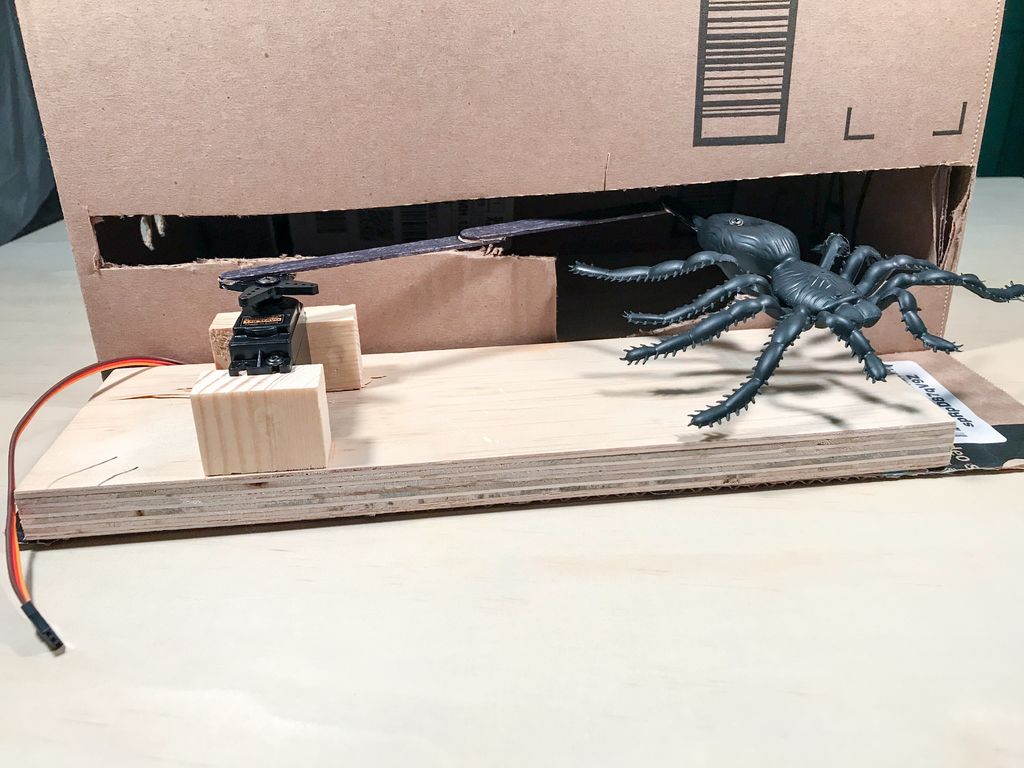
步驟5:添加Spider


下一步是得到一只丑陋的蜘蛛(或其他生物 - 請(qǐng)不要生活,否則它可能自行移動(dòng))。輕量級(jí)是優(yōu)選的,因此伺服不需要做太多工作。使用膠槍?zhuān)瑢筛粽吃谝黄穑缓筮B接到伺服臂/喇叭,如圖所示。 (您可能希望先用尖銳的顏色將冰棒棍顏色變黑,這樣它們就不那么明顯了。)然后使用伺服器附帶的一個(gè)小螺絲將蜘蛛安裝到另一根冰棒上。用一根棍棒將蜘蛛粘貼在冰棒棍臂的其余部分上,角度約為90度。
*注意:我剛剛將這些快速粘在上面,我沒(méi)想到蜘蛛的高度離開(kāi)了地面。您可能想嘗試將木棍和蜘蛛角向下靠近地面,這樣它看起來(lái)就像蜘蛛正好在地面上。
*注意:將這一切粘在一起之后,您可以擰下伺服手臂上有蜘蛛,將蜘蛛的起始位置與塊的邊緣對(duì)齊。
第6步:裝運(yùn)箱和完成工作

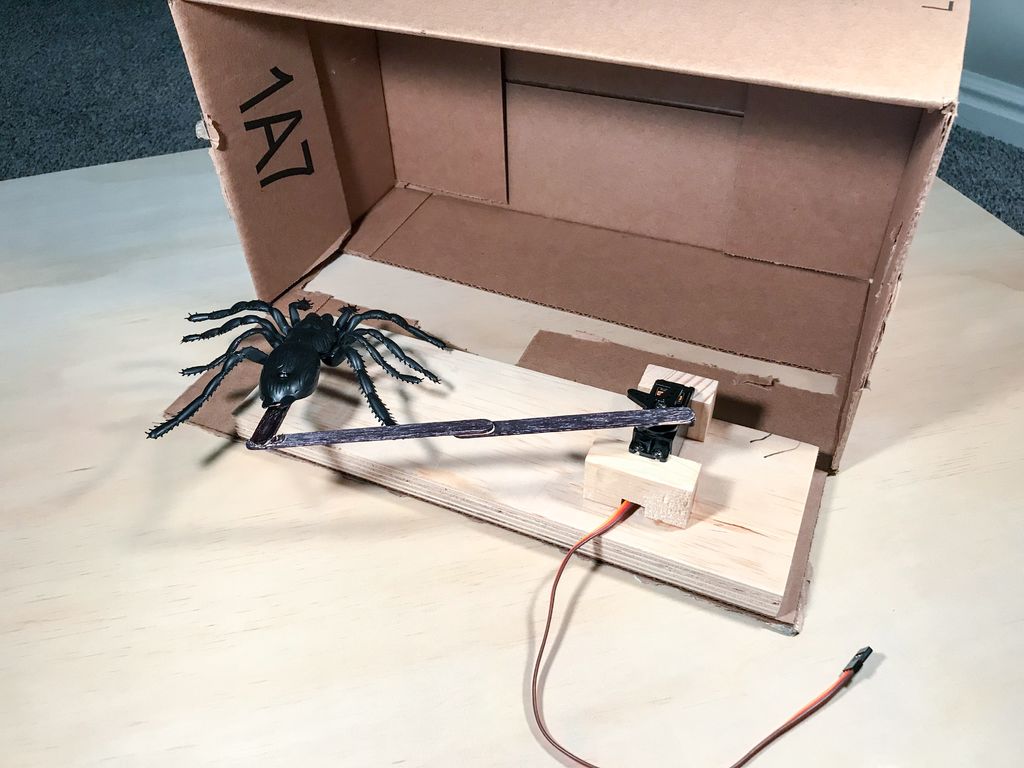

在測(cè)試了你的移動(dòng)蜘蛛幾次以感受手臂的路徑后,找一個(gè)足夠大的裝運(yùn)箱來(lái)裝入底座和蜘蛛。
*注意:不要從盒子上取下襟翼,因?yàn)槟銜?huì)將底座粘在其中一個(gè)底部襟翼上。
設(shè)置盒子旁邊的底座,估計(jì)然后用盒子刀切出手臂和區(qū)域的長(zhǎng)度或蜘蛛從盒子里出來(lái),如圖所示。然后將底座粘在底部翻蓋上,將盒子封在頂部,檢查一下,當(dāng)召喚時(shí),手臂/蜘蛛是否可以自由地從盒子里出來(lái)。根據(jù)需要切割更多的盒子。
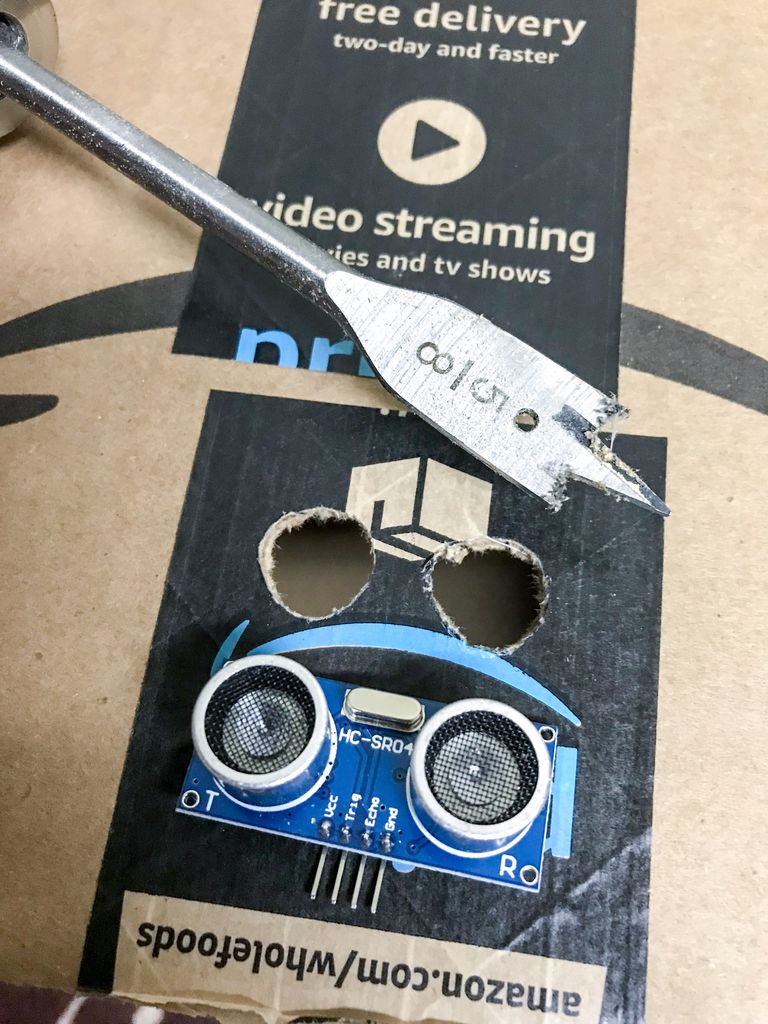
此時(shí)您需要確定放置傳感器的位置。選項(xiàng)是在盒子前面切一個(gè)孔,或者將傳感器放在盒子外面的某個(gè)位置。由于我的惡作劇是在前門(mén)階段使用,照明不是最好的人看到傳感器所以我只需用5/8鉆頭在盒子前面切孔并用膠水安裝。
第7步:完成!


你們都已經(jīng)完成了!將門(mén)閂設(shè)置在門(mén)廊上,就像它是一個(gè)交付的包裝,然后插入或連接到USB電池組。讓樂(lè)趣開(kāi)始!!!
-
Arduino
+關(guān)注
關(guān)注
188文章
6490瀏覽量
190075
發(fā)布評(píng)論請(qǐng)先 登錄
免費(fèi)分享Arduino入門(mén)+進(jìn)階(全套例程+書(shū)籍)

《ESP32S3 Arduino開(kāi)發(fā)指南》第二章 Arduino基礎(chǔ)知識(shí)
如何使用Arduino實(shí)現(xiàn)CAN總線(xiàn)通信呢
Arduino Nano Matter開(kāi)發(fā)板正式上市
自己設(shè)計(jì)的Arduino UNO R3主控板原理圖+PCB源文件(可直接打樣)
開(kāi)源項(xiàng)目!基于 Arduino 的 MIDI 架子鼓
基于Arduino的串口通信項(xiàng)目
stm32與Arduino的比較
如何使用Arduino實(shí)現(xiàn)CAN總線(xiàn)通信
AIGC在視頻內(nèi)容制作中的應(yīng)用前景
貿(mào)澤電子開(kāi)售Arduino新款解決方案
能將ESP8266連接到arduino UNO上,使用mesh組網(wǎng)嗎?
如何使用Arduino IDE構(gòu)建的ELF映像?
利用Arduino的自動(dòng)風(fēng)扇速度控制電路設(shè)計(jì)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論