 如何用手臂控制一個DOF機器人手臂
如何用手臂控制一個DOF機器人手臂
步驟1:方框圖/Scematic
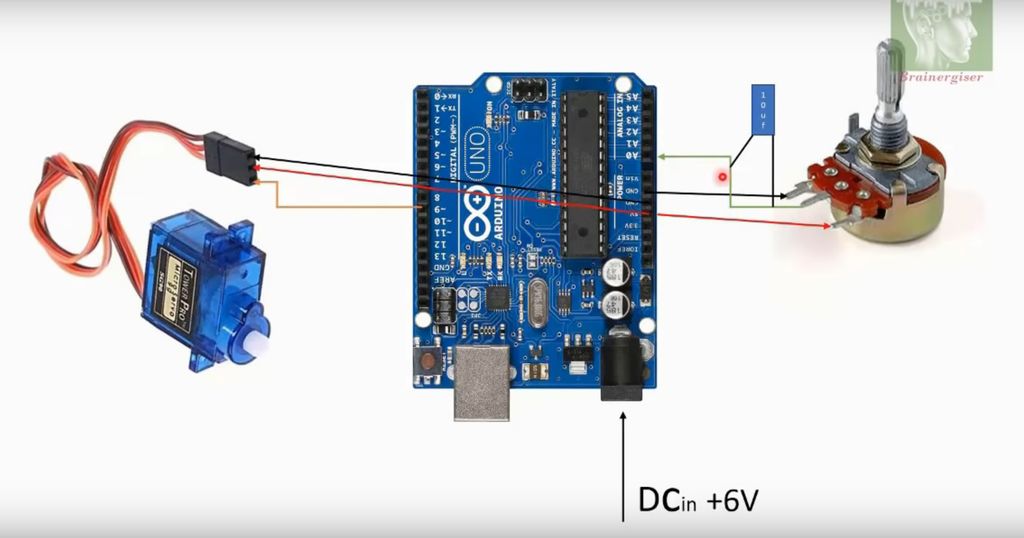
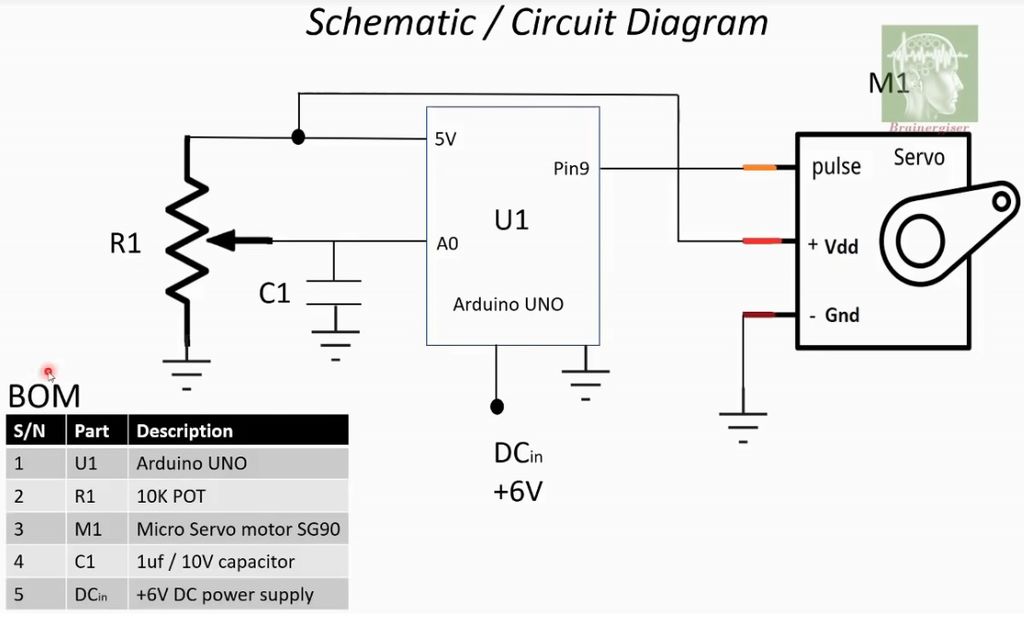
制作所需的電子元件:
1》 Arduino UNO板
2》 Micro SErvo電機
3》 10 K POT
4》 1uf,16V電容。
連接到端口-9和POT的伺服引腳連接到Arduino板的端口-A0。
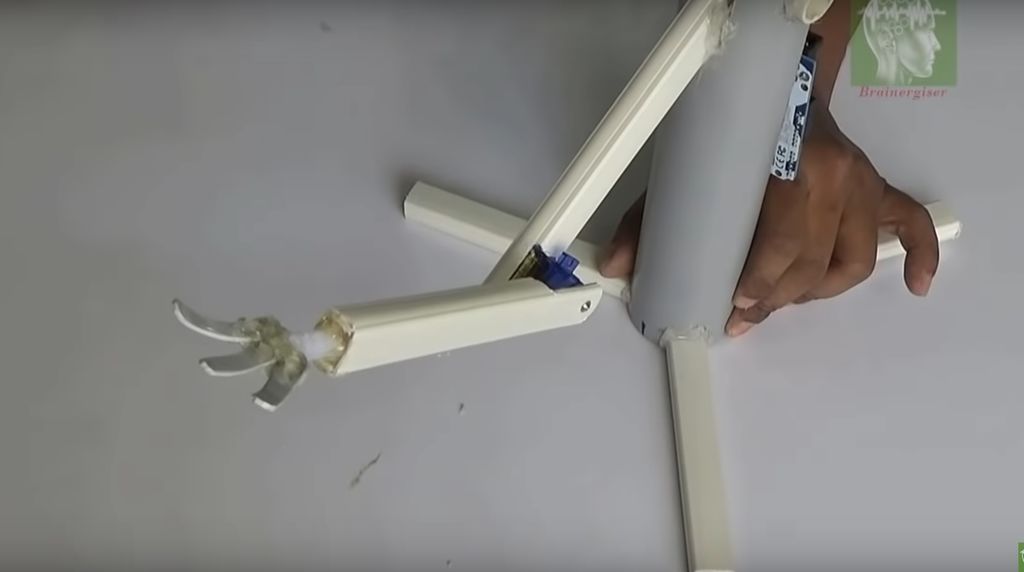
第2步:構建傳感器
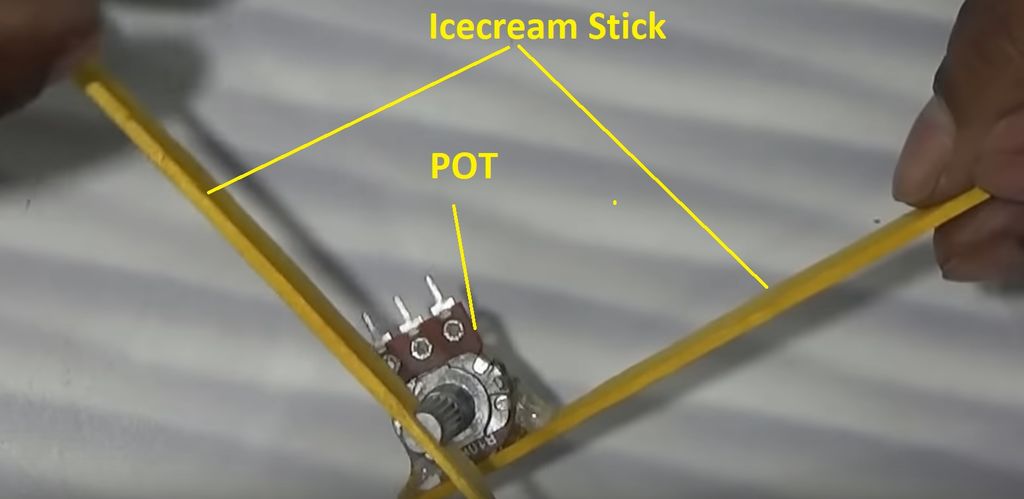
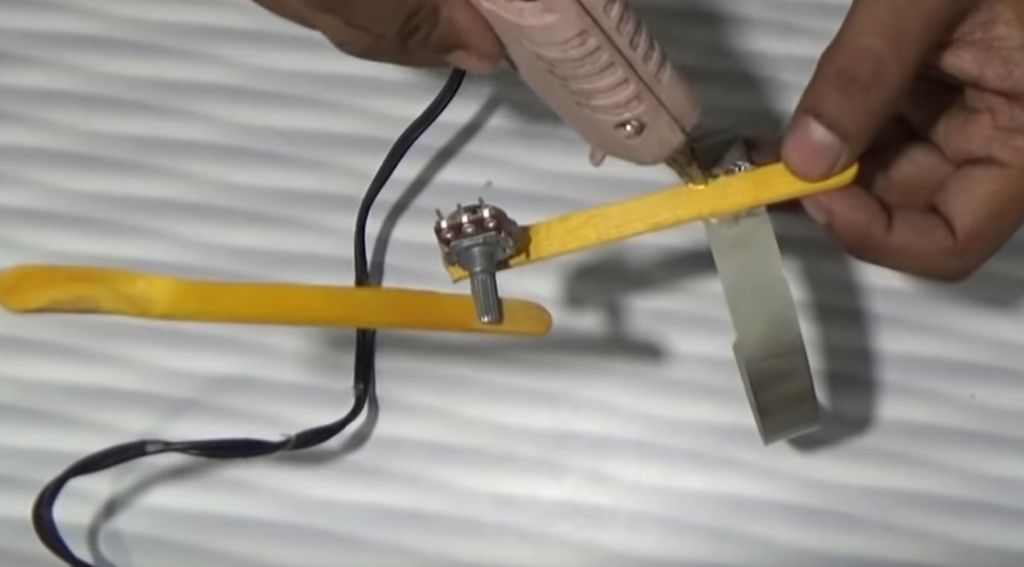

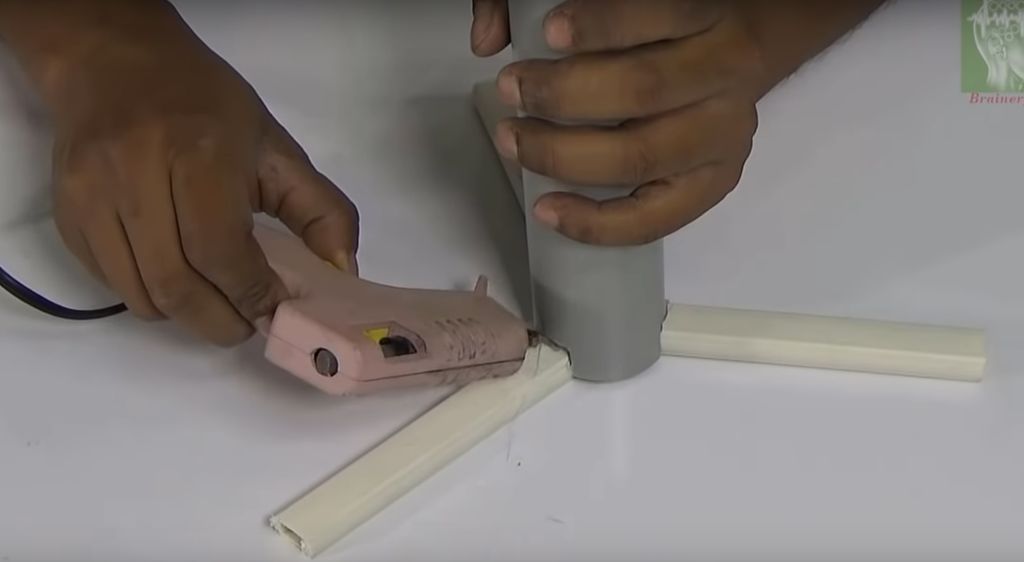
我們使用過兩個冰淇淋棒和一個半PVC管,使傳感器成為我們手臂的一部分。使用熱膠將一根棒連接在罐和PVC管之間。其他棒只附有POT。
將半PVC管與夾子一樣連在一起。 POT位于肘部,傳感器桿的另一側需要自由運動,因此使用橡皮筋與前臂連接。
第3步:構建手臂

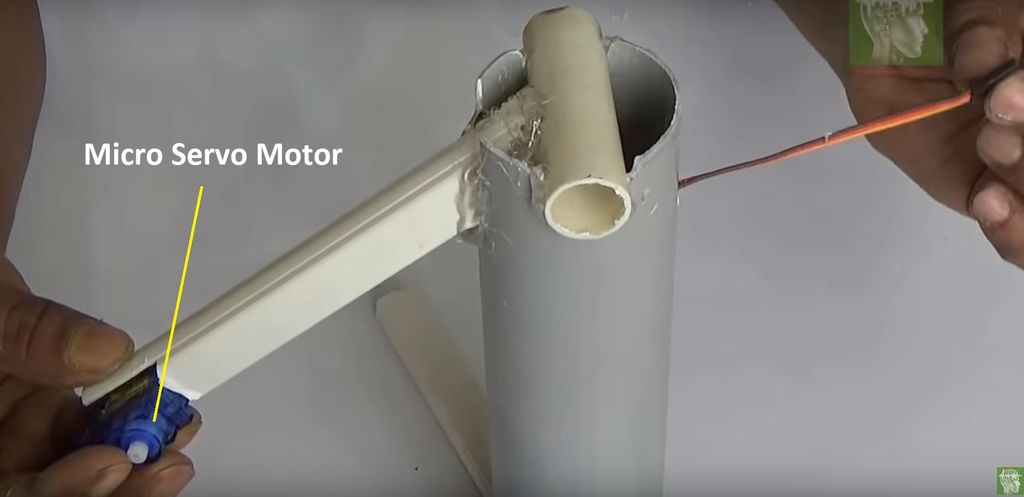


我們使用PVC管和電線套管制作一個自由度(DOF)機器人手臂。用于彎頭聯合我們使用一個伺服電機。伺服連接到Pin-9的Arduino板。
第4步:Arduino代碼
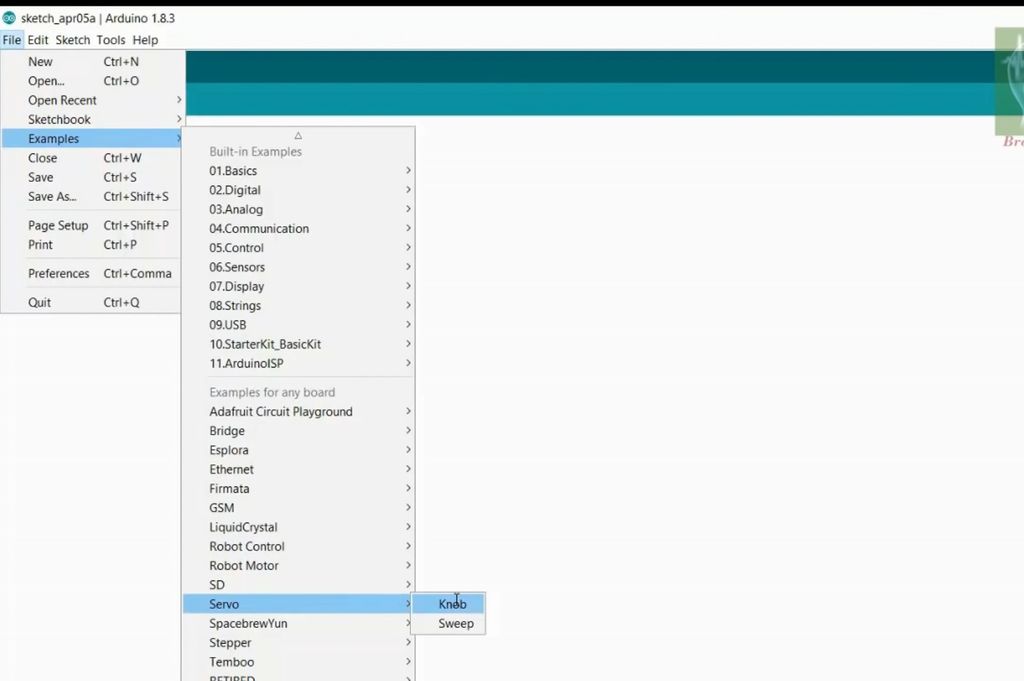
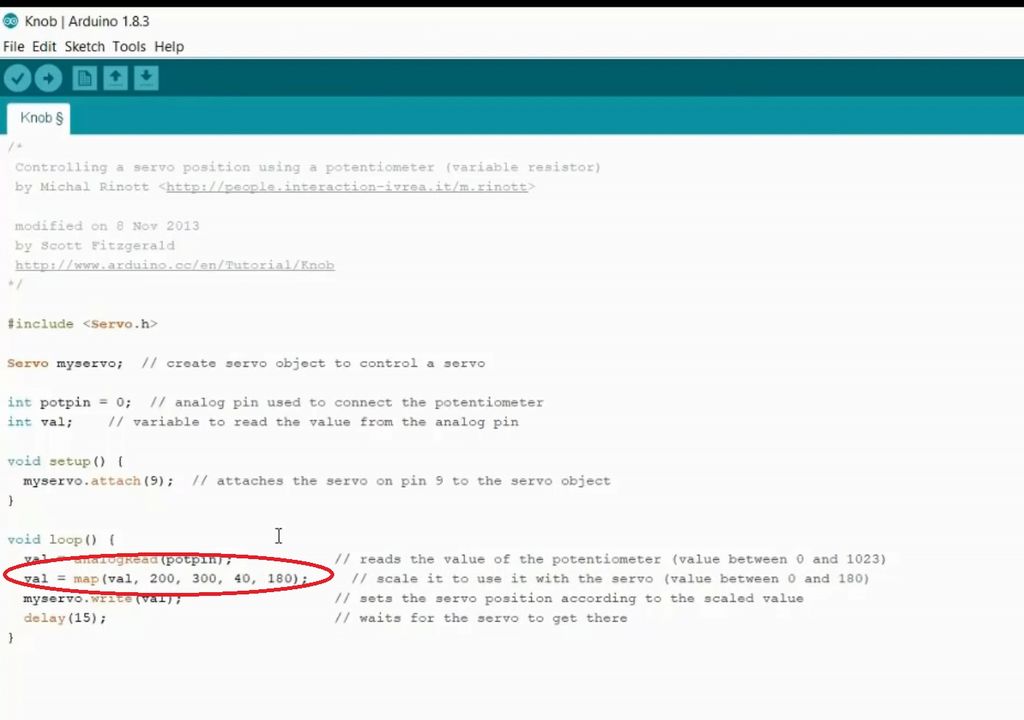
這很容易。它讀取連接POT的Port-A0的模擬值,并根據該值從地圖數組中生成一個值。它發送到pwm端口-9。基本上它是Arduino IDE中的示例文件。轉到file-》 example- Servo-》 knob.You只調整map()函數的值。
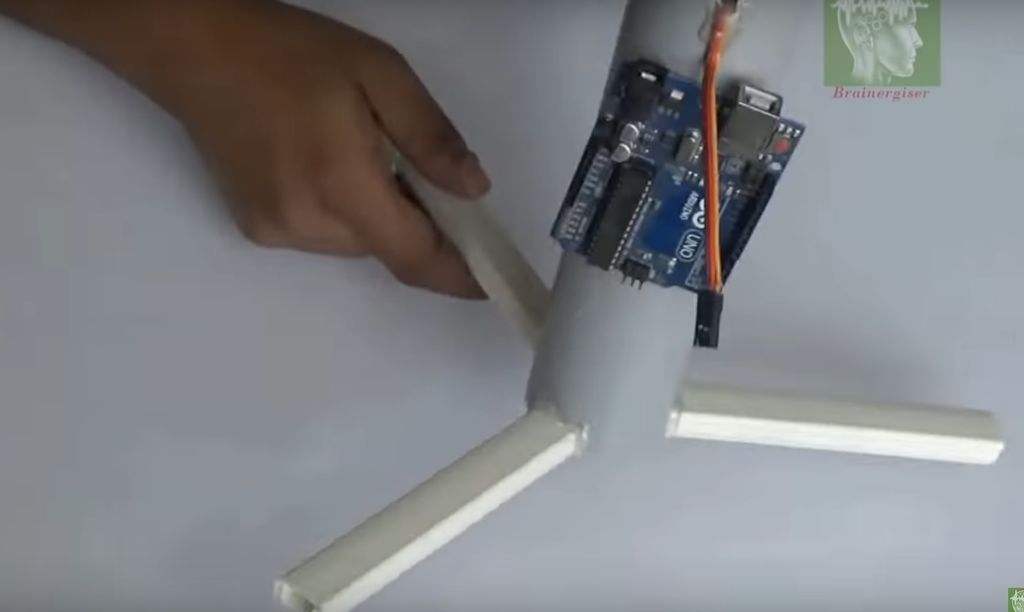
步驟5:最終裝配和測試

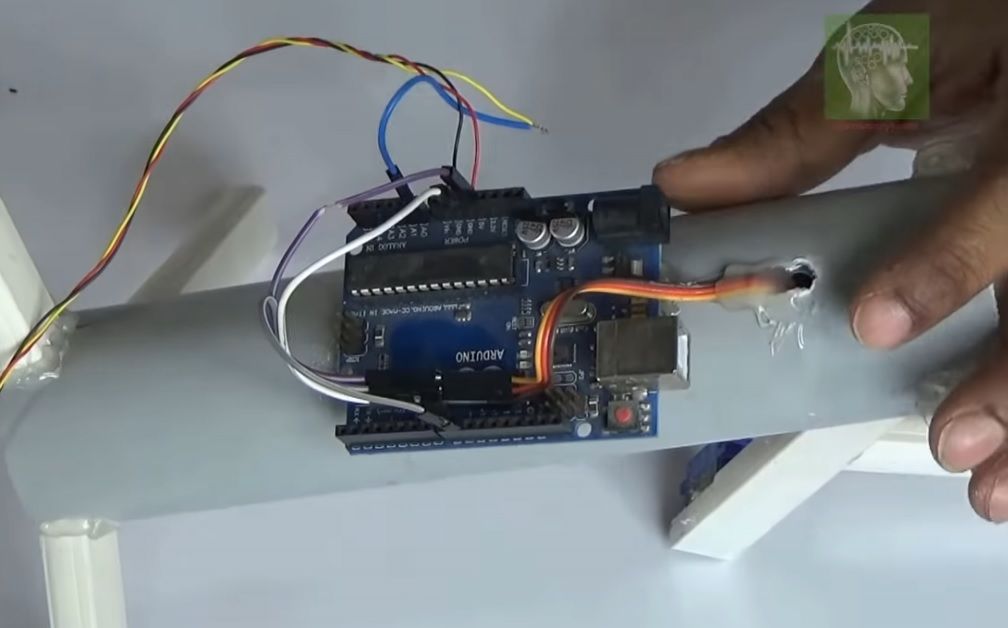
連接伺服和鍋線Arduino按照原理圖。加載草圖。使用外部6V電源為Arduino UNO供電。精細調整地圖功能。現在喜歡玩這個機器人。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
Arduino
+關注
關注
188文章
6490瀏覽量
190075 -
機器人手臂
+關注
關注
1文章
7瀏覽量
2639
發布評論請先 登錄
相關推薦
熱點推薦
速看!發那科機器人做為profinet轉ethernetip主站參數設置,每步都關鍵
界面上進行調整。比如,調整主、從站,以及字節數和IP地址的對應。下面一起看一下機器手臂的參數如何調整。 發那科機器手臂作為主站時,不同的通信

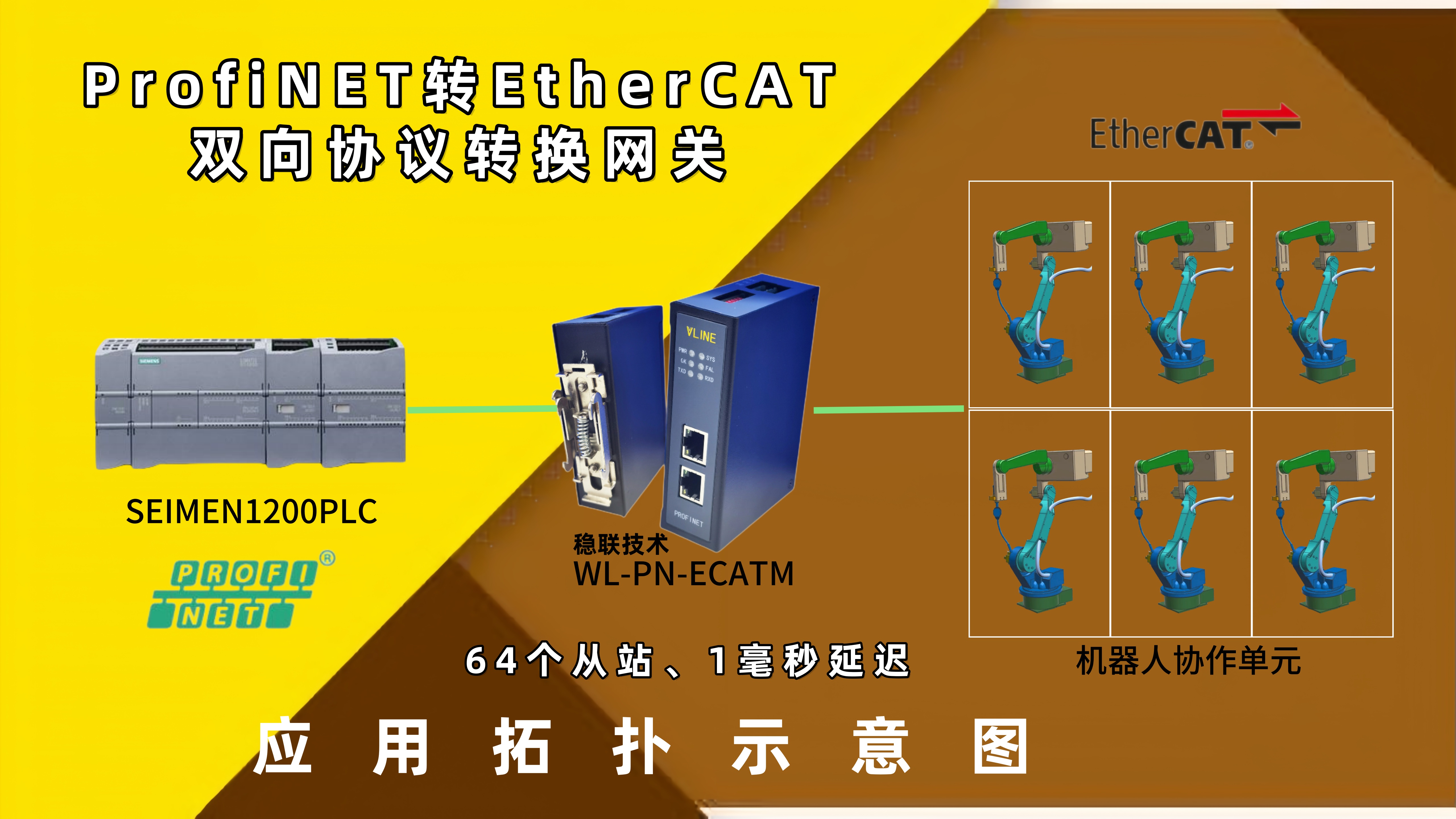
機器人手臂"聽不懂"指令?EtherCAT轉PROFINET網關妙解產線通信僵局
協作機器人(如KUKA iiWA)使用EtherCAT控制,與Profinet主站(如西門子840D CNC)同步動作。
基于Profinet-EtherCAT網關-穩聯技術WL-PN-ECATM
有人這CAN機器手臂控制板的原理圖嗎?CAN舵機ID無法被識別
CAN通信芯片)導致的嗎?
因為,舵機控制板與機器臂(貌似是什么克魯澤機器手臂)是學長流傳下來的,沒有找到硬件上的資料,控制指令倒是有
發表于 04-22 12:19
焊接工藝革命:CCLink IE轉PROFINET網關在汽車零部件生產線,賦能智能手臂的力量
焊接及多種焊接技術,這些手臂配備了先進的傳感器和控制系統,能夠執行高精度的焊接操作,確保焊接質量和一致性。 同時可以支持多種焊接技術,如MIG/MAG焊接、TIG焊接、激光焊接等,以適應不同材料和厚度的零部件。焊接

焊接工藝革命:CCLink IE轉PROFINET網關智能手臂的力量
焊接及多種焊接技術,這些手臂配備了先進的傳感器和控制系統,能夠執行高精度的焊接操作,確保焊接質量和一致性。 同時可以支持多種焊接技術,如MIG/MAG焊接、TIG焊接、激光焊接等,以適應不同材料和厚度的零部件。焊接
開源項目!教你如何制作一個開源教育機械臂
決定使用我的舊Anet A8 3D打印機構建一個緊湊的機器人手臂。
為了消除布線和試驗板的麻煩,我設計了一個定制的即插即用板,使構建和
發表于 03-10 11:22
未來已來,2025人形機器人量產啟航!泰科機器人成功斬獲近千萬訂單
泰科機器人在2024年年底傳來捷報,成功斬獲上海某機器人公司近千萬訂單!訂單涵蓋了100+人形機器人手臂,涉及1000+精密關節模組。尤為更重要的是,用于人形機器人腿部、腰部及頭部的伺

ABB機械手臂(機器人)數據采集物聯網解決方案
并減少人力成本。 隨著物聯網與信息化技術的發展,越來越多自動化設備得以實現遠程監控與在線管理,從而發揮更大管理效益,確保生產秩序的安全可控。對此,數之能提供ABB機械手臂(機器人)數據采集物聯網平臺,實現ABB機器人數

40個激光雷達!蘋果布局機器人感知系統,讓碰撞降低63.7%
蘋果入局人形機器人, 先做感知系統 !還一次性用了 40個激光雷達 ! 關于蘋果涉足人形機器人領域的傳聞早已甚囂塵上。近日,該公司確實有新動作——研發了

變速齒輪在機器人中的使用
扭矩的傳動裝置。它通常由多個不同大小的齒輪組成,通過齒輪間的嚙合來傳遞動力,并實現轉速和扭矩的轉換。 二、變速齒輪在機器人中的使用 驅動機器人手臂 : 機器人的手臂需要靈活、精確地移動
焊接機器人六個軸分別是什么作用
焊接機器人是現代工業自動化中的重要工具,其靈活性和高效性極大地提升了焊接質量和生產效率。在焊接機器人中,“六軸”是一個常見的結構設計,這六個

如果設計一款桌面款的機器玩具,最吸引人的外觀與功能要有哪些?
初步設想制作如下其中一款,有感興趣的朋友可以幫提提意見。
A一款圓敦敦的音響狀的“個人日程助手”,具備番茄鬧鐘、音樂播放、減壓交互、語言對話、工作日報生成。
B一款迷你瓦利機器人,有
發表于 10-19 18:25
EtherNet/IP轉DeviceNet協議網關(EtherNet/IP轉DeviceNet)
連接到EtherNet/IP總線中做為從站使用,連接到DeviceNet總線中做為從站使用。 廣泛應用:自動化裝配生產線中的機器人手臂采用EtherNet/IP協議,而部分輸送線和檢測設備使用DeviceNet

EtherNet/IP轉DeviceNet協議網關(JM-EIP-DNT)
連接到EtherNet/IP總線中做為從站使用,連接到DeviceNet總線中做為從站使用。 廣泛應用:自動化裝配生產線中的機器人手臂采用EtherNet/IP協議,而部分輸送線和檢測設備使用DeviceNet
AMD Kria? KR 260套件+ROS 2快速開發機器人解決方案
在這個項目中,我們將配置AMD Kria? KR 260機器人入門套件來控制Trossen Robotics ReactorX 150機器人手臂。這個復雜的機器人手臂使用ROBOTIS






 工商網監
工商網監
評論