") 如何用無人機播種
如何用無人機播種

第1步:獲取材料
注意:
如果這是第一個你做的無人機,我們建議從較小和更安全的無人機開始,如木制,小型和開源無人機:flone intructable。 Dronecoria太強大了,不能成為你的第一架無人機!
在哪里建造/購買
配備兩節(jié)電池和無線電控制器的完整無人機的成本低于2000美元。您應(yīng)該尋找用于切割木材的激光切割服務(wù),以及用于播種機構(gòu)的3D打印服務(wù)。好的地方應(yīng)該是FabLab和MakerSpaces。
我們在這里鏈接到不同的在線商店,如Banggood, Hobbyking ,或 T-Motor,在哪里購買組件,大部分也可以在 eBay 上找到它們。請記住,取決于您所在的國家/地區(qū),您可以找到更近或更便宜的供應(yīng)商。
請檢查遙測正確的法律頻率 電臺對于你的國家,通常美國為900 Mhz,歐洲為433Mhz。
我們的16000 mAh電池允許飛機在沒有有效載荷的情況下飛行41分鐘,但由于操作的性質(zhì),飛行到一個區(qū)域,盡快送種子(需要10分鐘左右),并且還建議使用更小更輕的電池。
機身
膠合板250 x 122 x 0.5 cm $ 28
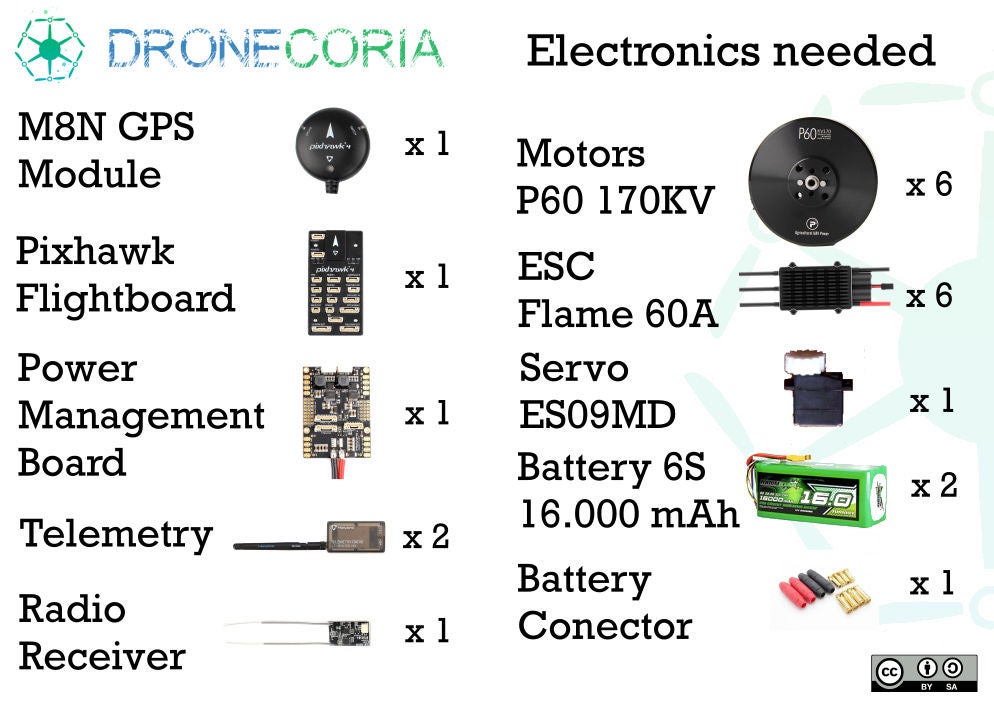
電子
電機: T-Motor P60 170KV 6 x $ 97.11
ESC: Flame 60A 6 x $ 90
螺旋槳: T- MOTOR聚合物折疊22“螺旋槳MF2211 3 x 55美元
電池: Turnigy MultiStar 6S 16000mAh 12C LiPo電池2 x $ 142
飛行控制器: HolyBro Pixhawk 4& M8N GPS模塊組合1 x 225.54
遙測:用于PIXHawk的Holybro 500mW收發(fā)器無線遙測設(shè)備套裝1 x $ 46.36
伺服 (種子控制):Emax ES09MD 1 x $ 9.65
各種
電池連接器AS150防-spark 1 x $ 6.79
電機接頭MT60 6 x $ 1.77
電機螺絲M4x20(替代型)3 x $ 2.42
熱縮管絕緣1 x $ 4.11
黑色和紅色電纜12 AWG 1x $ 6.83
黑色和紅色電纜10 AWG 1米x $ 5.61
電池帶20x500mm 1 x $ 10.72
粘性魔術(shù)貼$ 1.
無線電發(fā)射器iRangeX iRX-IR8M 2.4G 8CH多協(xié)議帶PPM S.BUS接收器 - 模式2 1 x 55 $
總計:1961,75美元
可能的海關(guān)費用,稅費或運費不包括在此預(yù)算中。
第2步:削減和機體合奏



在這個s中tep我們將按照構(gòu)建和組裝無人機框架的過程。
這個框架是用膠合板制作的,就像歷史悠久的無線電控制飛機一樣,這也意味著,可以用膠水修復(fù),如果發(fā)生事故和剎車,可以堆肥。
膠合板是一種非常好的材料,使我們能夠制造出輕便的無人機并且成本低廉。重量為1.8千克,可能需要幾百美元而不是數(shù)千美元。
數(shù)字化制作讓我們輕松復(fù)制,并與 分享設(shè)計
在視頻和附帶的說明中,您將看到安裝框架的過程。
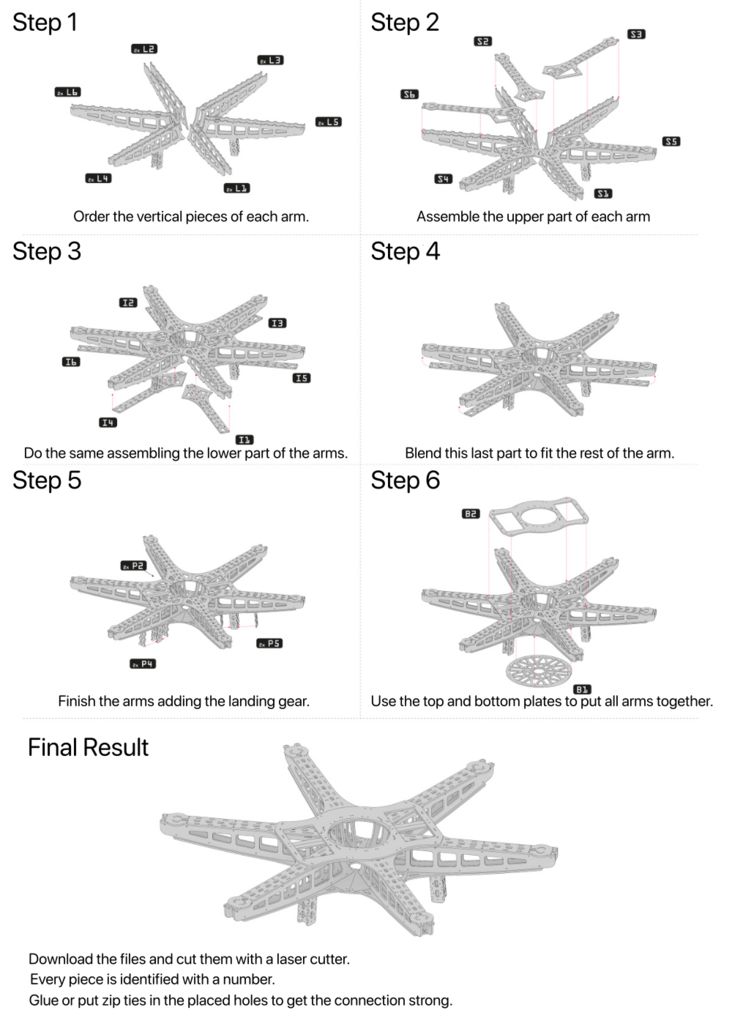
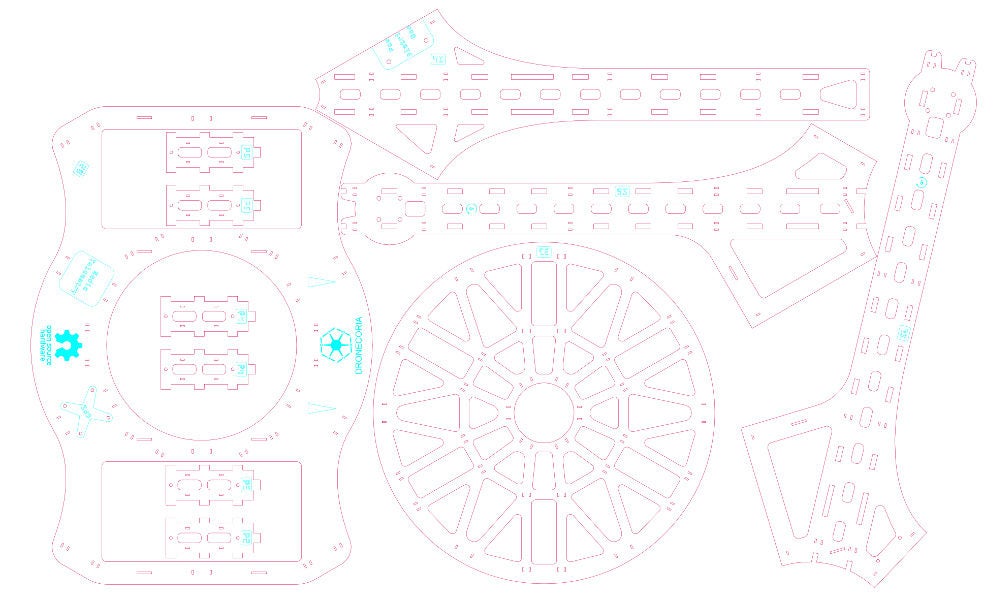
首先,您應(yīng)該下載文件并找到一個帶有激光切割機的地方來切割它們。一旦完成,這是主要的組裝步驟:
您需要使用碎片,每個手臂都由數(shù)字標(biāo)識。要開始構(gòu)建手臂,請訂購每只手臂的部件。
開始組裝每個手臂的上半部分。膠水或使用拉鏈以獲得強大的連接。
對手臂的下半部分做同樣的事情。
將最后一部分混合以適應(yīng)手臂的其余部分。
完成放置起落架的手臂。
最后,使用頂板和底板將所有手臂放在一起。
就是這樣!
在下一步中,您將學(xué)習(xí)如何安裝3D打印部件以丟棄種子,我們在那里等你!
步驟3:3D打印和整合種子分配器
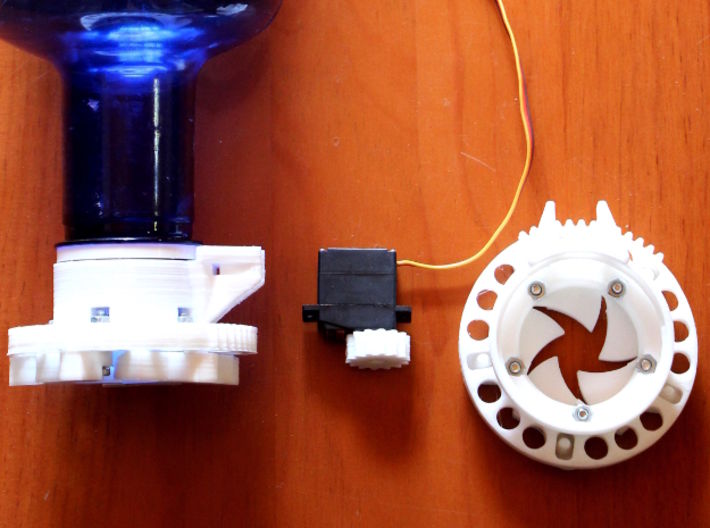



我們設(shè)計了一個 3D打印種子 - 釋放系統(tǒng),可以擰到任何PVC水瓶,如水龍頭,使用塑料瓶作為種子容器。
瓶子可以用作低重量 - 低成本,Nendo Dango種子球的接收者,作為無人機的有效載荷。 釋放機制位于瓶頸,伺服電機控制開口直徑,允許自動打開和控制,播種率
這是您需要的材料:
一個瓶頸很大的塑料瓶。
3D打印
拉鏈。
五個M3x16mm螺絲和螺母,
螺絲刀。
伺服。
連接伺服的東西,如飛行控制器,無線電接收器或伺服測試儀。
對于飛行器我們推薦使用數(shù)字伺服,因為數(shù)字電路可以過濾噪音,減少電池電量消耗,延長飛行時間,不產(chǎn)生任何可能影響飛行控制器的電子噪音。
我們推薦EMAX ES09MD伺服,質(zhì)量/價格平衡,并包含金屬齒輪。
您可以在線訂購Shapeways中的零件,也可以自行下載和打印零件。
裝配非常簡單:
只需將環(huán)放在螺釘上即可。
將每個螺釘逐個擰緊,將小塊連接到主體上,將螺母放在末端。
放置伺服器在他的位置,用拉鏈系帶固定。建議使用伺服附帶的螺絲,以便更牢固地固定。
將齒輪安裝到伺服軸上。 (在視頻中粘貼,但它不再是必要的。
測試它:將伺服連接到伺服測試儀,并丟棄一些種子:)
請隨意查看視頻,詳細(xì)了解組裝過程!
第4步:電子設(shè)備






一旦框架和播種機構(gòu)組裝好,就可以進行電子部件。
警告!
正確焊接,連接不良可能會造成災(zāi)難性后果,例如飛機完全松動或發(fā)生事故。
使用大量焊料,因為有些電線會支持高電流。
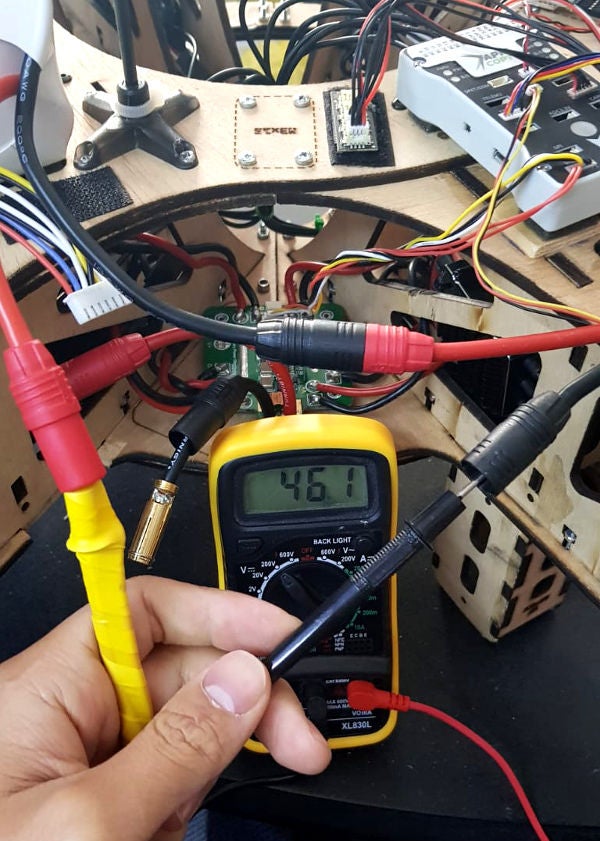
只有在完成所有安全檢查后才能連接電池。您應(yīng)該檢查(使用測試儀)導(dǎo)線之間沒有短路。
永遠(yuǎn)不要放置螺旋槳,直到一切配置完好。放置螺旋槳總是最后一步。
對于這個過程的這一部分,你應(yīng)該擁有所有電子元件:
6電機P60 179KV。
6 ESC Flame 60A。
2 LiPo電池6S。
1 FlightBoard Pixhawk 4
1 GPS模塊。
2無線電遙測收發(fā)器。
1無線電接收器。
2個AS150電池連接器。
6 MT60三線連接器。
電池帶。
1米黑色電纜12 AWG
1米紅色電纜12 AWG。
1米黑色電纜10 AWG
1米紅色電纜10 AWG。
24個電機螺絲。 M4 x 16。
一些工具如:
Solder&烙鐵。
熱縮管絕緣
膠帶。
魔術(shù)貼
焊接的第三只手。
雙面膠帶。
讓我們走吧!
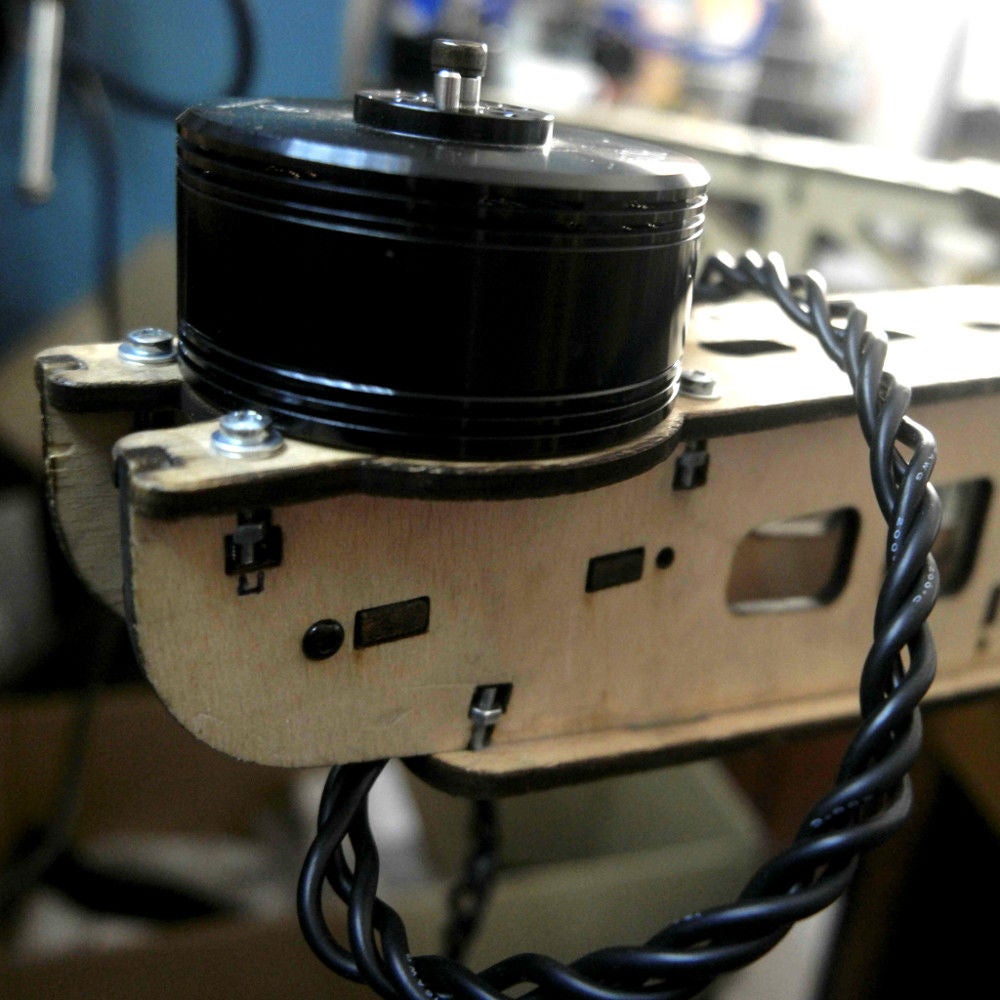
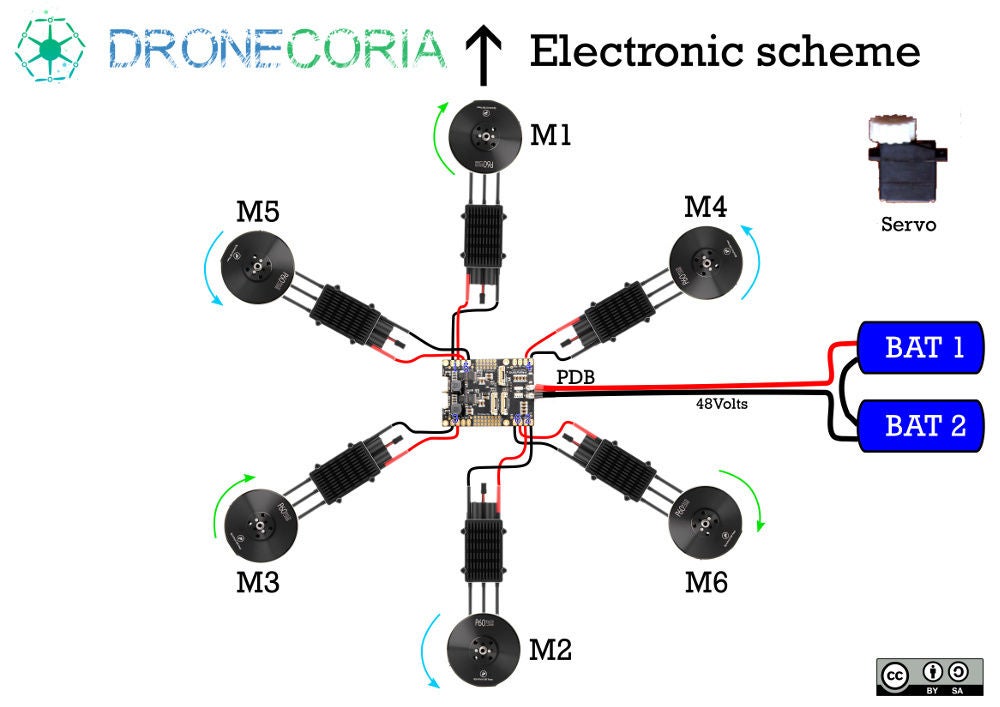
電機和ESC
每臺電機都有三根電纜,以避免與其他電子設(shè)備的電磁干擾,是個不錯的辮子電線,為了減少這種干擾,這個連接的長度也應(yīng)盡可能短。
這三根電機的電纜應(yīng)連接到ESC的三根電纜上,順序為這根導(dǎo)線取決于電機的最終方向,你應(yīng)該更換兩根導(dǎo)線來改變方向。檢查每個電機正確方向的方案。
要進行最終布線,您可以將MT60與三個連接器一起使用:將電纜從電機焊接到公連接器,將三條電線從ESC連接到母連接器。
重復(fù)這對于每對Motor-ESC來說是6次。
現(xiàn)在可以使用M4螺絲將電機擰到每個臂上。將ESC放置在框架內(nèi),并將每個電機與相應(yīng)的ESC連接。
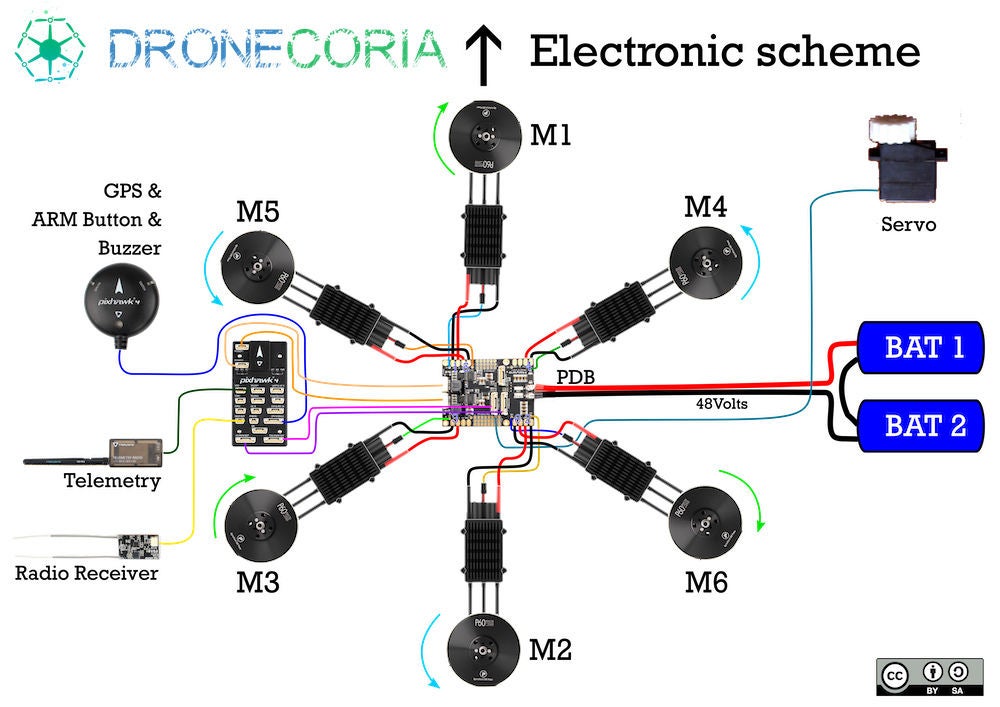
飛行控制器
使用雙面振動隔離帶放置飛行為了將電路板與振動隔離,使用正確的磁帶非常重要。檢查飛行板的箭頭是否與框架箭頭的方向相同。
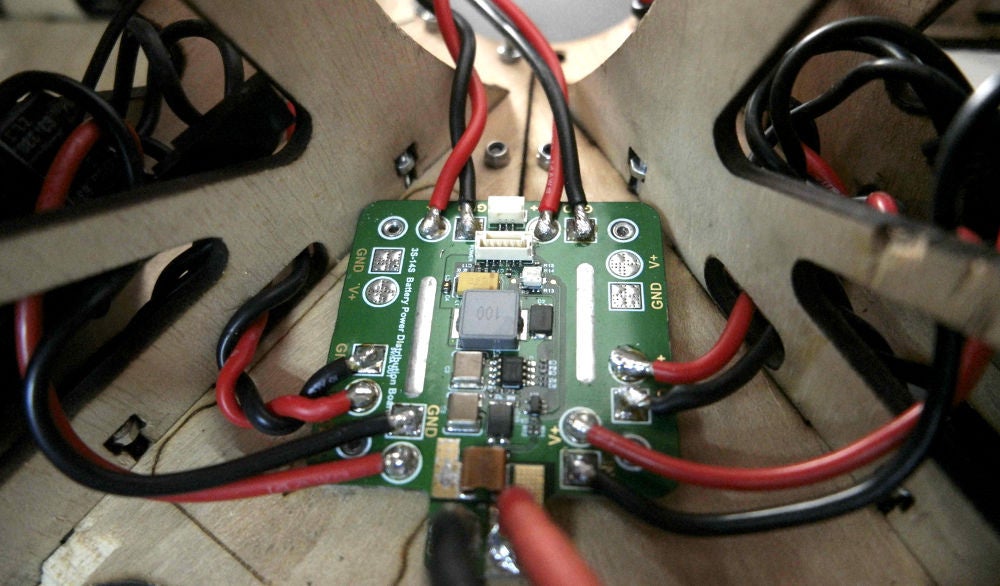
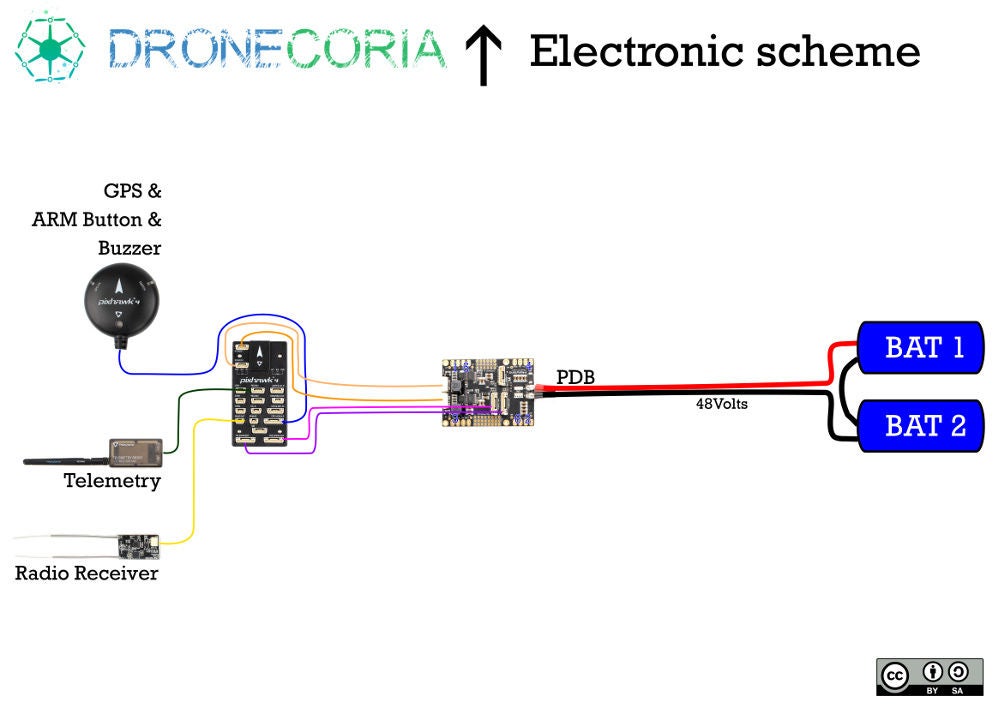
配電板。
PDB是無人機的電動爐灶,為每個元素提供動力。所有ESC都連接在那里以獲得電池的電壓。該PDB集成了BEC,為所有需要5V的元件供電,如飛行控制器和電子元件。還要測量飛機的耗電量,以便了解剩余的電池。
將電池連接器焊接到PDB 。
我們使用的P60電機設(shè)計工作在12S(44伏),因為我們的電池是6S,它們應(yīng)串聯(lián)連接以增加每個電壓。每個電池有22.2伏特,如果我們串聯(lián)連接電池,我們將獲得44.4伏。
最簡單的電池連接方式是使用AS150連接器,這樣我們就可以直接將一個電池連接到其他以及每個電池對PDB的正負(fù)極。
如果您的電池有不同的連接器,您可以輕松地將連接器更換為AntiSpark AS150或使用適配器。
開始將10 AWG電線焊接到PDB,使用足夠的電纜從PDB的位置到達(dá)電池。然后完成AS150連接器的焊接。請注意正確的極性。
焊接ESC到PDB。
電池的能量直接進入PDB,然后從PDB電源進入六個不同的ESC。開始將PDB放置在他們設(shè)計的位置并擰緊或使用維可牢尼龍搭扣固定到框架上。
使用12 AWG電線將每個ESC的正極和負(fù)極焊接到PDB,此PDB可以最多可支持8個電機,但我們只使用六個電機的連接,所以通過ESC(正負(fù))焊接ESC到PDB。
每個ESC配有一個三線連接器,你會選擇該連接器的白色信號線將其焊接到PDB中的指定位置。
最后,將帶有設(shè)計端口的PDB連接到飛行板,
GPS& Arm Button&蜂鳴器
此GPS集成了一個按鈕,用于布防飛機和蜂鳴器觸發(fā)警報或發(fā)出不同信號。
將GPS底座放在標(biāo)記處定位并將其擰到框架上,注意在沒有振動或移動的情況下建立牢固的附件,然后使用指定的電纜將其連接到滑板。
遙測
通常,您需要一對設(shè)備,一個用于飛機,另一個用于地面站。將一個遙測收發(fā)器放在所需位置,并使用尼龍搭扣或雙面膠帶固定在其位置。使用特定端口將其連接到飛行板。
無線電接收器
將無線電接收器放在設(shè)計的位置,用尼龍搭扣或雙面固定然后將膠帶放在盡可能遠(yuǎn)的地方,并用膠帶將它們安全地固定在框架上。如您在方案中所見,將接收器連接到飛行板。
第5步:軟件配置
提示:
我們使這個Instructable盡可能完整,并提供了讓飛行控制器準(zhǔn)備好飛行所需的基本指令。對于完整配置,您可以隨時查閱 Ardupilot / PixHawk 項目的官方文檔,以防不清楚或固件更新到新版本。
要執(zhí)行此步驟,您應(yīng)該連接互聯(lián)網(wǎng)以下載并安裝所需的軟件和固件。
作為地面站,要在基于arducopter的車輛中配置和執(zhí)行飛行計劃,您可以使用APM Planner 2或QGroundControl,兩者都適用于所有平臺,Linux,Windows和OSX。 (即使在Android中也是QGroundControl)
因此,第一步將下載并安裝您選擇的地面站到您的計算機。
根據(jù)您的操作系統(tǒng),您可能需要安裝額外的驅(qū)動程序才能連接到主板。
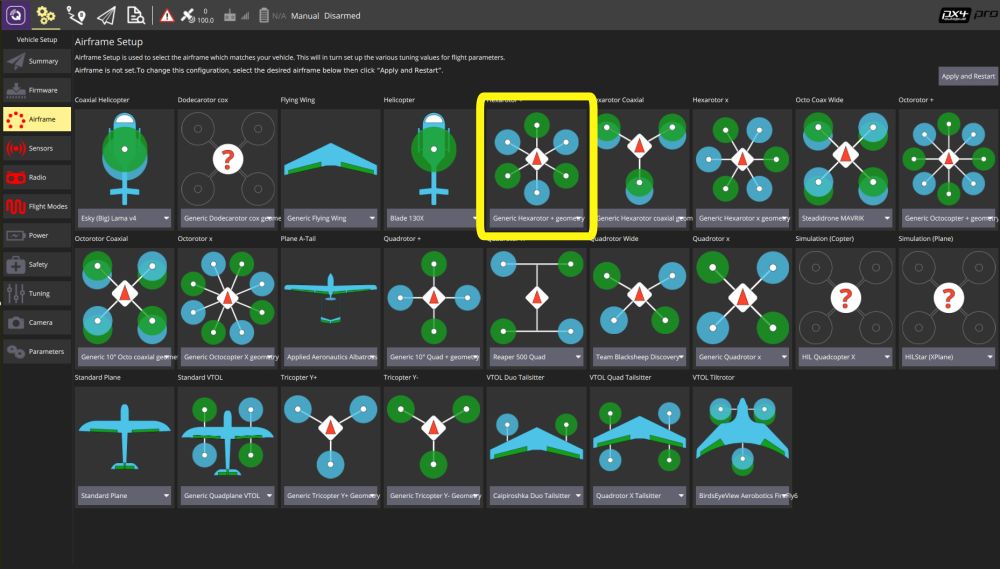
安裝完成后,通過USB線將飛行控制器連接到計算機,選擇安裝固件,作為機身,您應(yīng)該選擇帶+配置的六軸飛行器無人機,這會將最后一個固件下載到您的計算機并上傳到無人機。在上傳的同時不要中斷此過程或斷開電纜。
安裝固件后,您可以連接無人機,并進行飛機配置,這種配置應(yīng)該只進行一次或每次升級新固件時。由于是一架大型飛機,最好先配置無線遙控?zé)o線連接,以便在沒有有線電纜的情況下輕松移動無人機。
無線電遙測連接。
將USB收音機連接到電腦,然后使用電池打開無人機電源。
然后,將電池連接到無人機,然后點擊地面電臺連接,根據(jù)您的操作系統(tǒng),默認(rèn)情況下可以顯示不同的端口,通常端口為AUTO,應(yīng)該建立穩(wěn)固的連接。
如果沒有,請檢查您使用的是正確的端口,以及此端口的正確速度。
ESC校準(zhǔn)。
為了配置ESC,請使用最小和最大節(jié)流值,應(yīng)執(zhí)行ESC校準(zhǔn)。最簡單的方法是通過Mission Planer,單擊ESC Calibration并按照屏幕上的步驟操作。如果您有疑問,可以在官方文檔中查看ESC校準(zhǔn)部分。
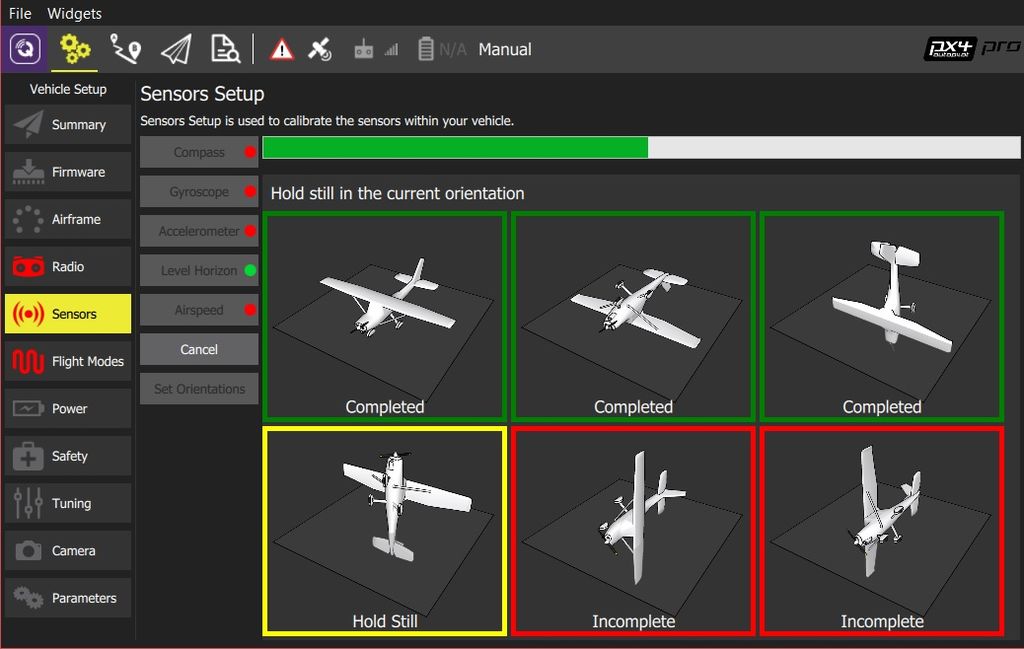
校準(zhǔn)加速度計。
要校準(zhǔn)加速度計,您需要一個平面,然后你應(yīng)該點擊Calibrate Accelerometer按鈕并按照屏幕上的說明,他們會要求你把無人機放在不同的位置,每次按下按鈕,位置應(yīng)該是水平的,在左側(cè),在右側(cè),機頭向上和機頭向下。
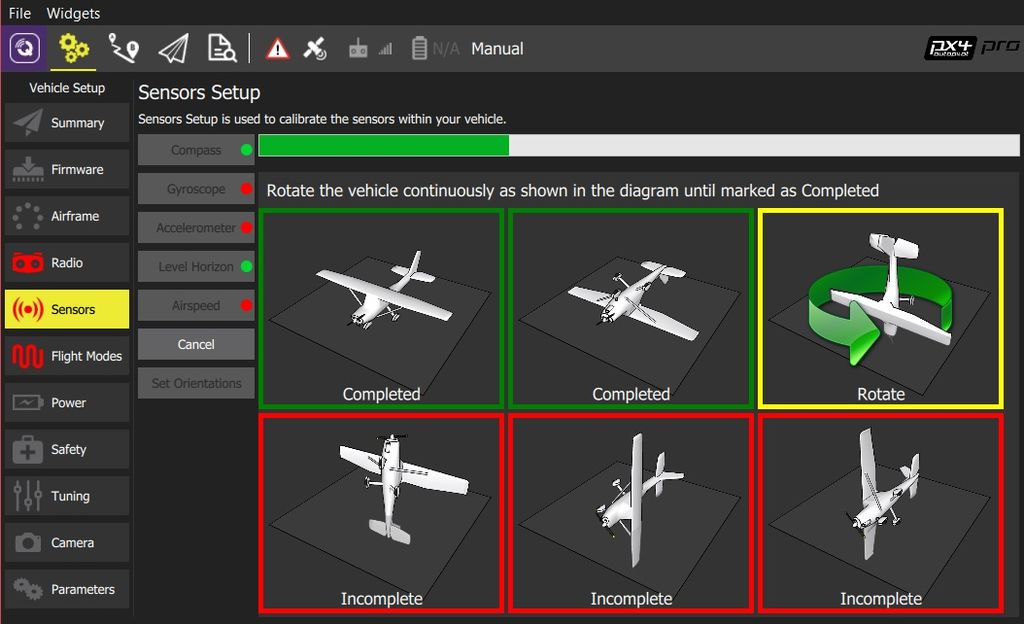
校準(zhǔn)磁力計。
校準(zhǔn)磁力計,按下按鈕校準(zhǔn)磁力計后,你應(yīng)該將整架飛機移動360度以進行全面校準(zhǔn),屏幕將在此過程中為你提供幫助,并在完成后提醒你。
配對無線電接收器。
按照無線電控制器的說明綁定發(fā)射器和接收器。連接完成后,您將看到信號到達(dá)飛行控制器。
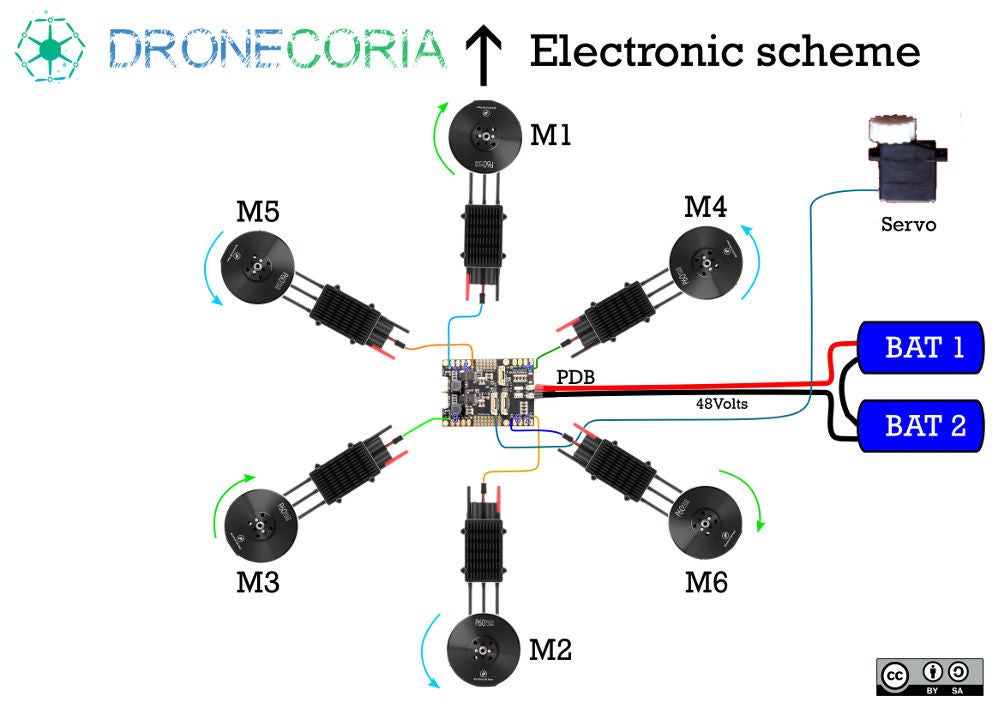
配置伺服器用于種子釋放
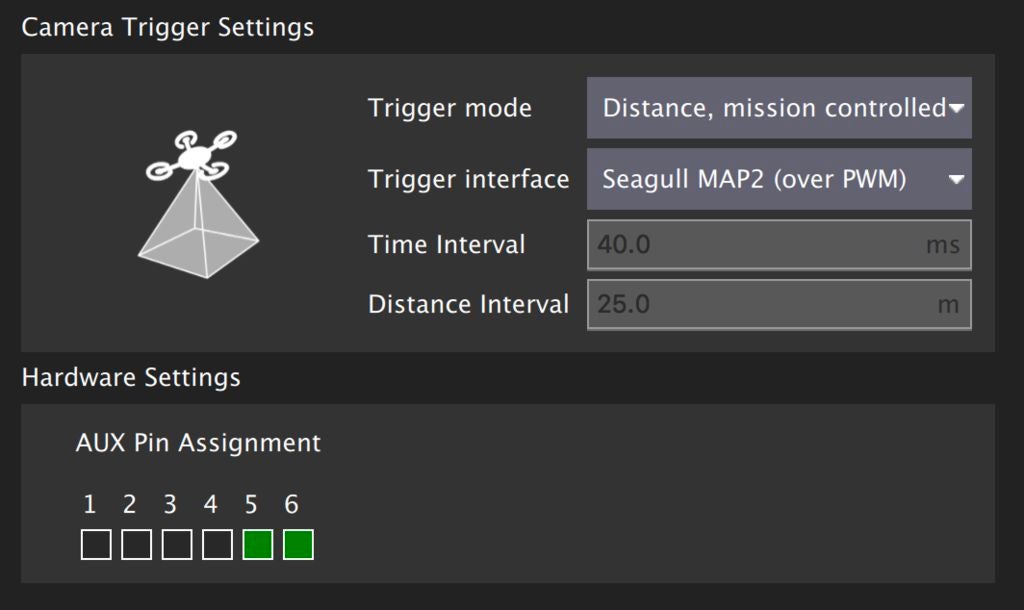
種子釋放系統(tǒng),用于飛行控制器,可以配置為相機,但不是拍照,丟種子:)
相機配置在觸發(fā)模式下,支持不同的模式,只需選擇為你的使命做得更好:
就像可以啟用和禁用的基本間隔計一樣工作。自動打開和關(guān)閉。
持續(xù)打開間隔計。無人機總是掉落種子。也許沒那么有用,因為我們會在起飛時丟失一些種子。
根據(jù)距離觸發(fā)。在手動飛行中將有用的是在地面上以特定頻率丟棄種子,并且具有飛機速度的獨立性。每次超過設(shè)定的水平距離時,系統(tǒng)都會打開門。
在任務(wù)模式下飛行調(diào)查時自動觸發(fā)。用于規(guī)劃從地面站丟棄種子的地方。
我們的框架適用于標(biāo)準(zhǔn)配置,因此無需進行特定配置。
步驟6:飛行并執(zhí)行重新造林項目!




映射區(qū)域。
發(fā)生火災(zāi)或恢復(fù)退化區(qū)域后,第一步是執(zhí)行損壞評估和記錄當(dāng)前狀態(tài)。對于這項任務(wù),無人機是一種基本工具,因為它們忠實地記錄了土地的狀況。為了執(zhí)行這些任務(wù),我們可以使用傳統(tǒng)的無人機或捕獲近紅外線的相機,這些相機可以讓我們看到植物的光合作用。
反射的紅外線越多,植物就越健康。根據(jù)受影響的地形數(shù)量,我們可以使用多旋翼飛行器,每個飛行的地圖容量大約《15》公頃,或選擇固定機翼,可以映射到 200公頃在一次飛行中。選擇的決議取決于我們想要觀察的內(nèi)容。要進行第一次評估,每個像素的分辨率為2到5厘米就足夠了。
對于進一步的評估,當(dāng)想要檢查一個區(qū)域播種的種子的演變時,建議采用分辨率約為1厘米/像素的采樣來觀察生長。
23米的高度飛行將達(dá)到1厘米/像素, 70米的飛行將獲得3厘米/像素的分辨率。
要制作地形的正射影像和數(shù)字模型,我們可以使用免費工具,如PrecissionMapper或OpenDroneMap,也就是自由軟件。
完成正射影像后,請將其上傳至開放空中地圖,與其他人分享土地狀況。
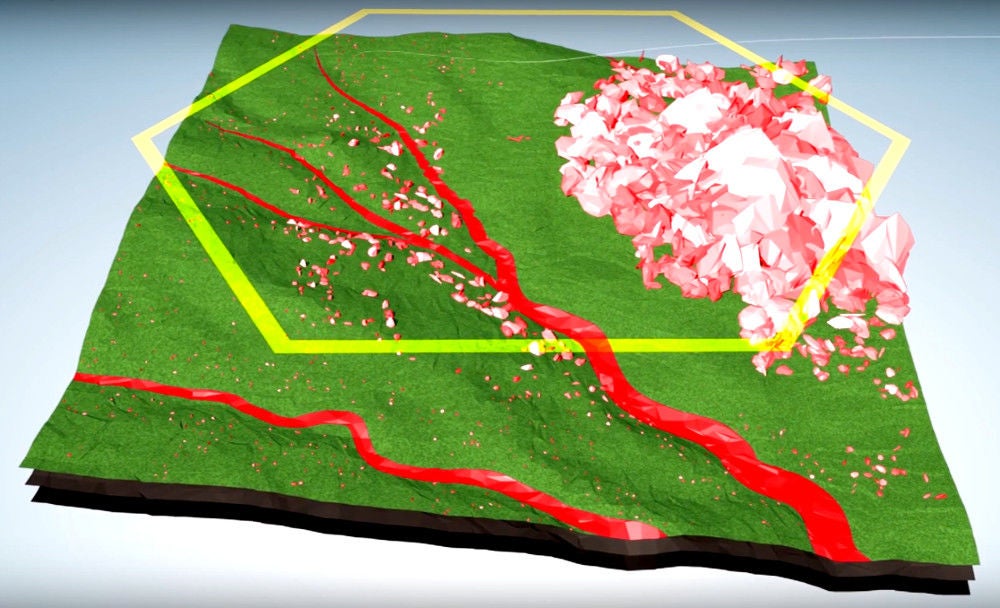
對該地區(qū)進行分析和分類
當(dāng)我們重建正射影像時,這個圖像(通常是geoTIFF格式)包含每個像素的地理坐標(biāo),因此圖像中任何可識別的對象都將其2D,緯度和經(jīng)度坐標(biāo)與真實相關(guān)聯(lián)。世界。
理想情況下,要了解領(lǐng)土,我們還應(yīng)該處理3D數(shù)據(jù)并分析其高程特征,目的是找到理想的播種地點。
表面分類和分割
要重新造林的區(qū)域,物種的密度和類型將由生物學(xué)家,生態(tài)學(xué)家,林業(yè)工程師或修復(fù)專業(yè)人員確定,也可由法律或政治問題。
作為近似值,我們可以指出每公頃50,000粒種子,這將是每平方米5粒種子。要播種的該表面將被限定在先前映射的區(qū)域內(nèi)。一旦確定了可重新造林的潛在區(qū)域,第一個必要的分類將區(qū)分真實區(qū)域與播種區(qū)域,以及不分區(qū)。
您應(yīng)該確定為非播種區(qū):
基礎(chǔ)設(shè)施:道路,建筑,道路。
水:河流,湖泊,洪水泛濫的地區(qū)。
非肥沃的表面:巖石區(qū)域或大石塊。
傾斜的土地:,坡度大于35%。
因此,第一步是將領(lǐng)土劃分為進行播種的區(qū)域。
我們可以播種這些區(qū)域,產(chǎn)生植被覆蓋,避免侵蝕,并盡快開始播種恢復(fù)土壤。
播種無人機
一旦我們將這些多邊形構(gòu)建在哪里播種,就可以完全填充表面有了種子,我們應(yīng)該知道可以打開播種無人機的播種寬度路徑,以及建立的飛行高度,以便對該地區(qū)進行完整的巡視,并在這條已知寬度的路徑之間進行分離。
速度還將決定每平方米的種子數(shù)量,但我們將盡量使速度最大化,最大限度地縮短飛行時間,并在最短的時間內(nèi)每公頃進行播種操作。假設(shè)我們以20公里/小時的速度飛行,這將是每秒約5米,如果我們的路徑寬度為10米,一秒鐘將覆蓋50平方米的表面,所以我們應(yīng)該每秒扔250顆種子來覆蓋目標(biāo)每平方米增加5粒種子。
我們希望你能有很好的航班恢復(fù)生態(tài)系統(tǒng)。
我們需要你來對抗野火。
如果你到了這里,你手中有一個非常強大的工具,一只能夠在8分鐘內(nèi)重新造林一公頃的無人機。但這種權(quán)力是一項重大責(zé)任,使用 ONLY NATIVE SEEDS 不會對生態(tài)系統(tǒng)造成任何干擾。
如果你想合作,有問題需要解決,或者你有改善這個項目的好主意,我們是在wikifactory網(wǎng)站上組織的,所以請使用這個平臺來發(fā)展項目。
再次感謝幫助我們打造一個更環(huán)保的星球。
Dronecoria團隊。
本手冊由:
LotAmorós(Aeracoop)
Weiwei Cheng Chen (PicAirDrone)
Salva Serrano (Ootro Studio)
第7步:獎金追蹤:為自己的種子涂抹自己的種子


強力種子( Semillas Poderosas )是一個項目,我們使有機種子涂層的知識,使類型的成分和生產(chǎn)方法與低成本材料。
在退化土地的恢復(fù)中,無論是火災(zāi)還是不育土壤,種子造粒都是改善播種,降低種子成本和環(huán)境的關(guān)鍵因素需要。
我們希望這些信息對農(nóng)民和環(huán)保主義者有用,可以進行修復(fù)工程,自己造粒,增加種子的活力,確保種子將在發(fā)芽過程中受到真菌和捕食者的保護,增加微生物學(xué)以提高土壤肥力。
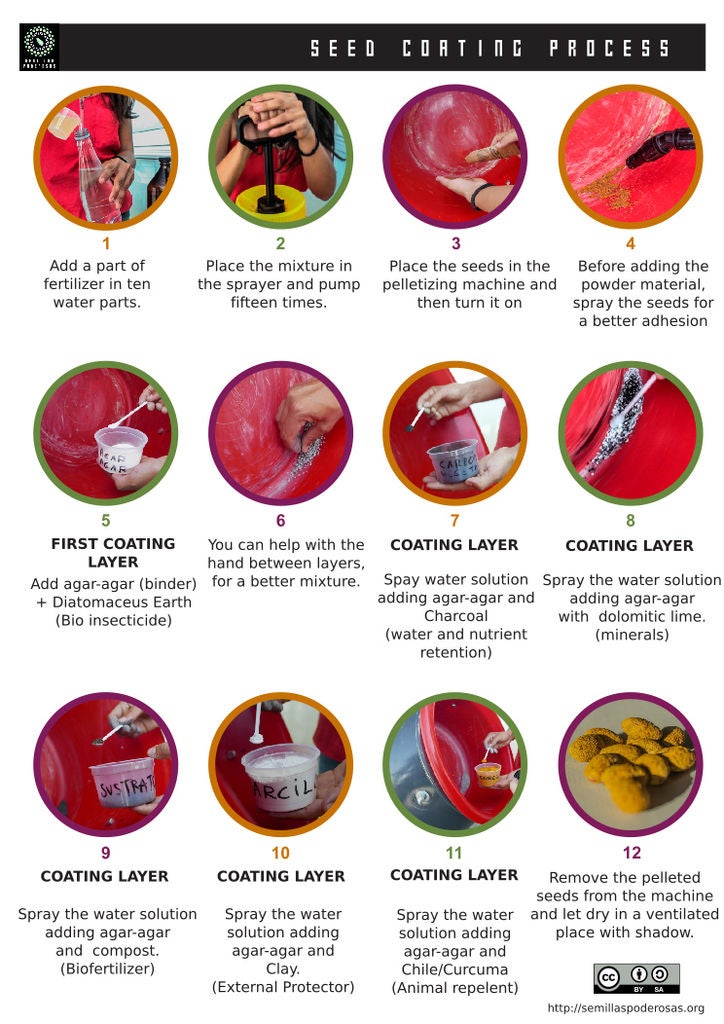
我們使用傳統(tǒng)的水泥攪拌機和水噴霧器開發(fā)了本教程,以便將大量種子造粒。為了將較小的種子造粒,可以將桶應(yīng)用于混合器。我們的3層方法:
第一層: 生物保護。天然化合物,可以保護種子免受有害物質(zhì)如真菌和細(xì)菌的侵害。主要的天然殺菌劑是:大蒜,蕁麻,灰,馬尾,肉桂,硅藻。
第二層: 營養(yǎng) 。它們是由有益的土壤微生物產(chǎn)生的天然有機肥料,其與根部產(chǎn)生協(xié)同作用。主要生物肥料:蚯蚓腐殖質(zhì),堆肥,液體肥料,高效微生物。
第三層: 外部保護。天然化合物,可以保護種子免受外來因素,如捕食者,陽光和脫水。防蟲劑:灰,大蒜,硅藻土,丁香,姜黃煙草,辣椒,薰衣草。針對外部因素的藥劑:粘土,水凝膠,木炭,石灰白云石。
介于兩者之間:粘合劑。涂料通過粘合劑粘合或粘合物質(zhì),防止覆蓋層破裂或撕裂。這些粘合劑可以是:車前子,海藻酸鹽,瓊脂,阿拉伯樹膠,明膠,植物油,奶粉,酪蛋白,蜂蜜,淀粉或樹脂。
我們建議你從小控件開始,直到你掌握了這項技術(shù)。這個過程很簡單,但需要經(jīng)驗直到你知道正確的金額。
固體成分應(yīng)該涂得非常薄,一點一點地涂抹,不會形成結(jié)塊或產(chǎn)生沒有種子的顆粒。液體組分通過盡可能薄的粉碎機施加,不會產(chǎn)生液滴。在材料和材料之間施加最少量的液體以改善灰塵在球上的附著力。有些材料需要比其他材料更多的粘合劑,因為它們可能更貼紙。如果你將球粘在一起,你可以非常小心地將它們分開,因為它們會破裂。良好的造粒不應(yīng)該需要機械分離。
在視頻中,您將看到 Eruca Sativa 涂層工藝的一個例子。請注意,這是一個示例,您可以根據(jù)不足或潛在的土壤和種子,也可以從捕食者,或您所在地區(qū)的成分的可用性,組合不同的涂層組件。在本教程中,我還提供了可以使用的附件清單。
作為粘合劑,我們將使用瓊脂瓊脂。作為生物保護劑,我們將使用硅藻土。作為營養(yǎng)成分,木炭,還有堆肥,白云石和液體生物肥料。用于外保護層的粘土和姜黃。
最重要的元素是種子,不得使用農(nóng)用化學(xué)品進行任何類型的處理。
生物肥料被稀釋在水中的比例為十分之一。在這種情況下,50升立方厘米的半升水。液體制劑在液體噴霧器中,我們給它施加15次壓縮。
我們將種子存放在機器中,并用水噴灑。噴霧應(yīng)盡可能小,以免形成腫塊。然后我們打開機器,開始涂層。
如果你的手粘在一起,你可以輕輕地將種子分開。
我們加入硅藻粉并混合形成均勻的混合物,然后我們加水解除塊狀物。
將木炭加入混合物中并重復(fù)噴水,然后加入白云石或鈣質(zhì)土。
一旦層形成良好,襯底盡可能薄。為此,您可以使用過濾器。
將粘土與種子充分混合。最后,對于外保護層,我們決定加入姜黃。
顆粒狀的種子應(yīng)該在陰涼處在戶外曬干,否則它們會制動。
-
無人機
+關(guān)注
關(guān)注
231文章
10841瀏覽量
186735
發(fā)布評論請先 登錄
低空物流:無人機開啟未來配送新篇章
淺談反無人機技術(shù)的核心原理
無人機轟炸機場中使用的通信技術(shù)

無人機巡檢系統(tǒng)守護未來的空中衛(wèi)士
《手把手教你做星閃無人機—KaihongOS星閃無人機開發(fā)實戰(zhàn)》系列課程課件匯總
科達(dá)嘉電感在無人機系統(tǒng)中的應(yīng)用
MOS 管在無人機電池中的關(guān)鍵應(yīng)用

光伏電站無人機巡檢系統(tǒng)的具體應(yīng)用與優(yōu)勢
半導(dǎo)體制冷模組賦能無人機巢:無人機效能 “熱”?點突破

DIY了一臺無人機,用全志T113芯片
無人機滑環(huán)的核心特點及其應(yīng)用分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論