") 怎樣制作一個(gè)由樹莓派控制的剪叉式升降機(jī)
怎樣制作一個(gè)由樹莓派控制的剪叉式升降機(jī)
第1步:需要哪些東西

這個(gè)項(xiàng)目你需要一堆東西。如果你像我一樣享受3D打印和構(gòu)建東西,你可能已經(jīng)擁有了大部分內(nèi)容。確保你看看麥克馬斯特卡爾的螺絲,當(dāng)你購買它們的價(jià)格要便宜得多。您也可以從亞馬遜訂購套裝。
需要的工具:
5.5毫米套筒扳手
2.5,2.0 mm hex驅(qū)動(dòng)器值得擁有一套好的。
鉆1/8“鉆頭我有這個(gè)鉆頭套裝。
石墨潤(rùn)滑油
烙鐵
焊料我認(rèn)為焊接時(shí)我的焊接質(zhì)量很差。
Sander(最好的砂光機(jī)) (世界上)
3D打印機(jī)我有XYZ Da Vinci Pro 1.0并且對(duì)它感到很興奮。
機(jī)械部件:
合金鋼插座或按鈕頭螺釘:請(qǐng)務(wù)必訂購超過您需要的訂單,因?yàn)槲业挠?jì)數(shù)可能已關(guān)閉!
(1)M3 x 10mm按鈕頭
(2)M3 x 12mm按鈕頭
(4)M3 x 10mm
(6)M3 x 12mm
(4)M3 x 16mm
(34)M3 x 20mm
(2)M3 x 25mm按鈕頭
(8)M3 x 30mm
(4)M3 x 45mm
(30)M3尼龍鎖緊螺母
(54)M3墊圈
(48)3x6x2mm軸承在沒有這些軸承的情況下工作,但確保更好。
(1)8x22x7mm軸承你也可以偷一個(gè)來自煩躁的微調(diào)器
3D印刷零件您可以從正面零件下載這些零件
(2)梁20mm x 20mm x 190mm
(1)限制器
(1)電機(jī)螺旋安裝
(1)平臺(tái)導(dǎo)軌
(1)平臺(tái)
(1)后螺旋安裝
(1)滑塊
(1)剪式內(nèi)底
( 4)剪刀內(nèi)部
(1套)剪式外部
(1)伺服安裝前部
(1)伺服安裝后部
(1套)墊片
(2)5/16“螺母(Home Depot)
(1)5/16”x 5 - 1/2“螺栓(Home Depot)如果您愿意,也可以使用5/16”螺紋桿。
電氣:
Raspberry Pi,我使用3型號(hào)B +任何Pi版本都可以使用這是一個(gè)不錯(cuò)的套件。
(1)Lewansoul LX-16a串行總線伺服,我的價(jià)格低于20.00美元(我需要搜索亞馬遜或Banggood,鏈接不斷變化)
(1)Lewansoul串行總線調(diào)試板。
(1)金屬伺服喇叭
(2)限位開關(guān)https://amzn.to/2SsZBGj
硅膠線這些很棒,你可以用指甲剝掉它們(如果你不咬指甲)
電池供電伺服,我正在使用宜家的4節(jié)AA鎳氫電池。
消耗品:
Q-Tips
超細(xì)纖維布
創(chuàng)可貼(希望不是)
第2步:基礎(chǔ)
分階段構(gòu)建它更容易,讓我們將從基地開始。然后我們將轉(zhuǎn)向電子設(shè)備,最后組裝剪刀。它印有不同的顏色,因?yàn)槲沂褂玫氖荘LA和PETG。
如果您還沒有這樣做,請(qǐng)打印出您的零件。我的打印機(jī)花了幾天時(shí)間完成所有部件的打印。
你可以在這里找到這些部件:https://www.thingiverse.com/thing:3325636
花點(diǎn)時(shí)間,不要過度擰緊M3螺絲,塑料條很容易。如果剝開孔,您可能需要重新打印部件或使用一些大猩猩膠(棕色的東西)并用牙簽輕輕涂在孔內(nèi),并在使用前將其完全干燥過夜。
將洗衣機(jī)“漂亮的一面”放好,看起來更好。
慢慢來,或者你可能需要重新打印。
打印剪刀部分最后,因?yàn)樗菢?gòu)建的最后一部分。
我們走了。
A。開始打印所有部件(參見零件清單。
B。將零件磨平,修剪出令人討厭的東西。
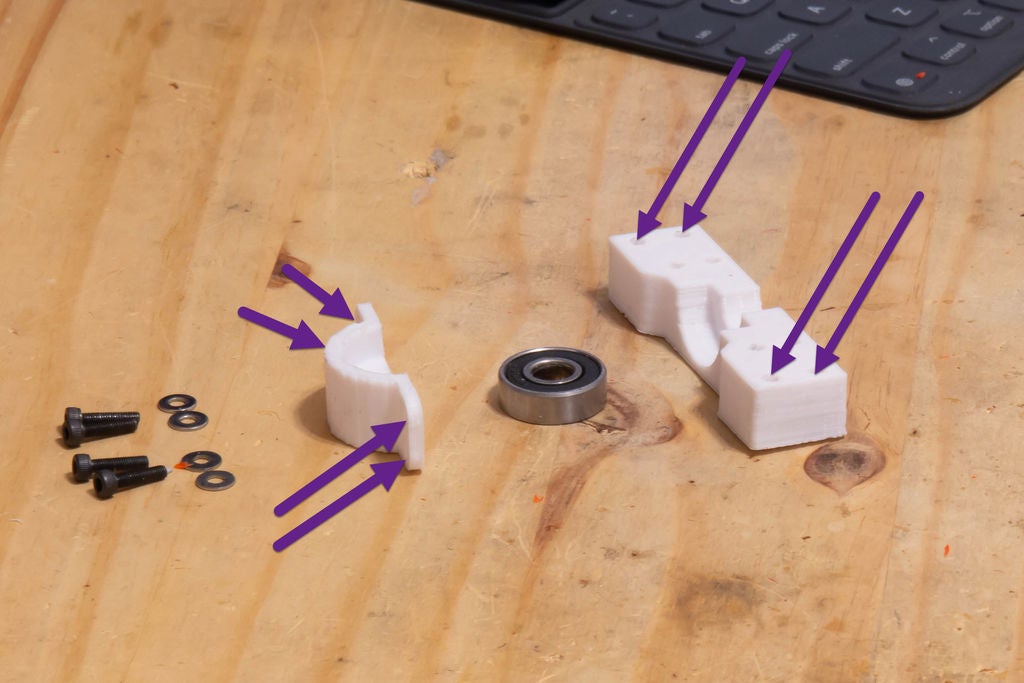
步驟3:安裝限位開關(guān)。
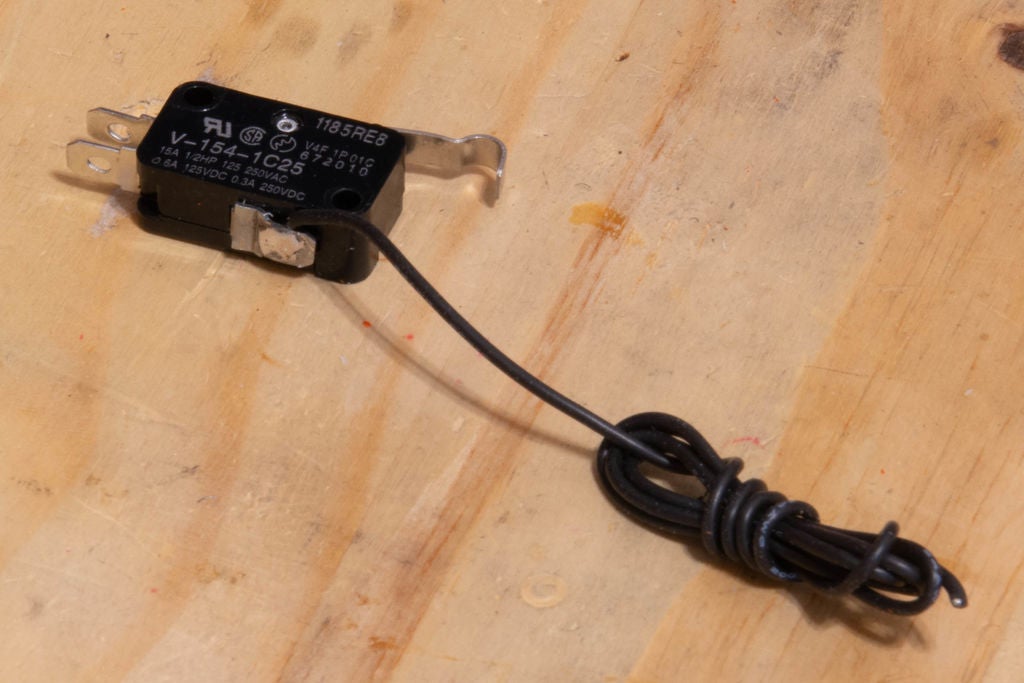
A。彎曲公共引線(側(cè)面已彎曲的引線)開關(guān)),所以它齊平并焊接限位開關(guān)上的電線。如果忘記此步驟,則沒有足夠的間隙來安裝伺服。
注意:這是在構(gòu)建的這一部分需要進(jìn)行的唯一焊接。
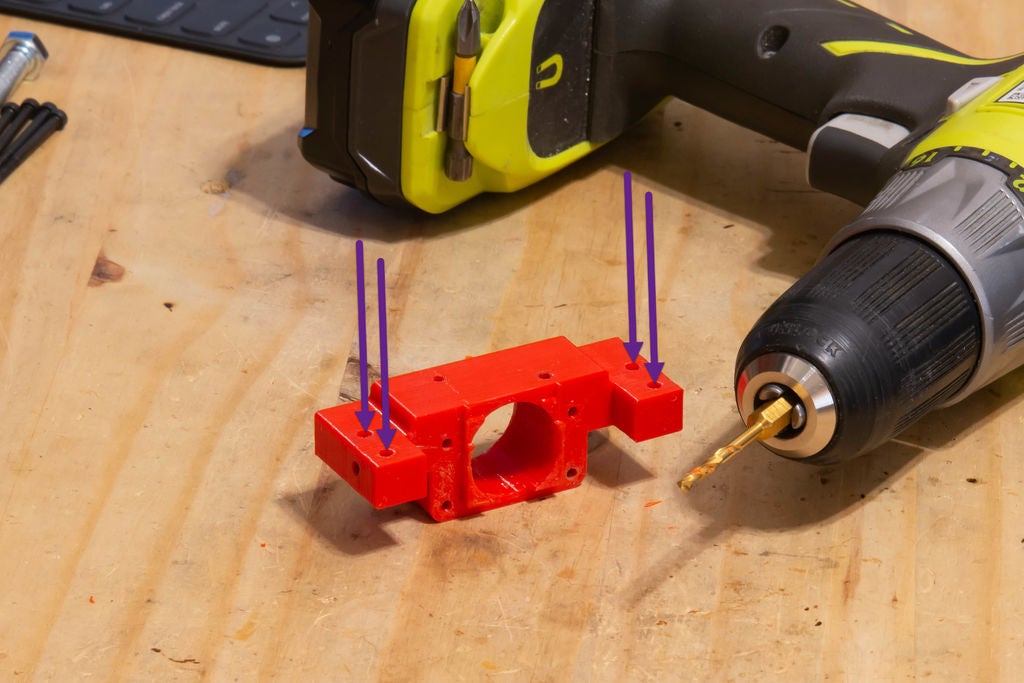
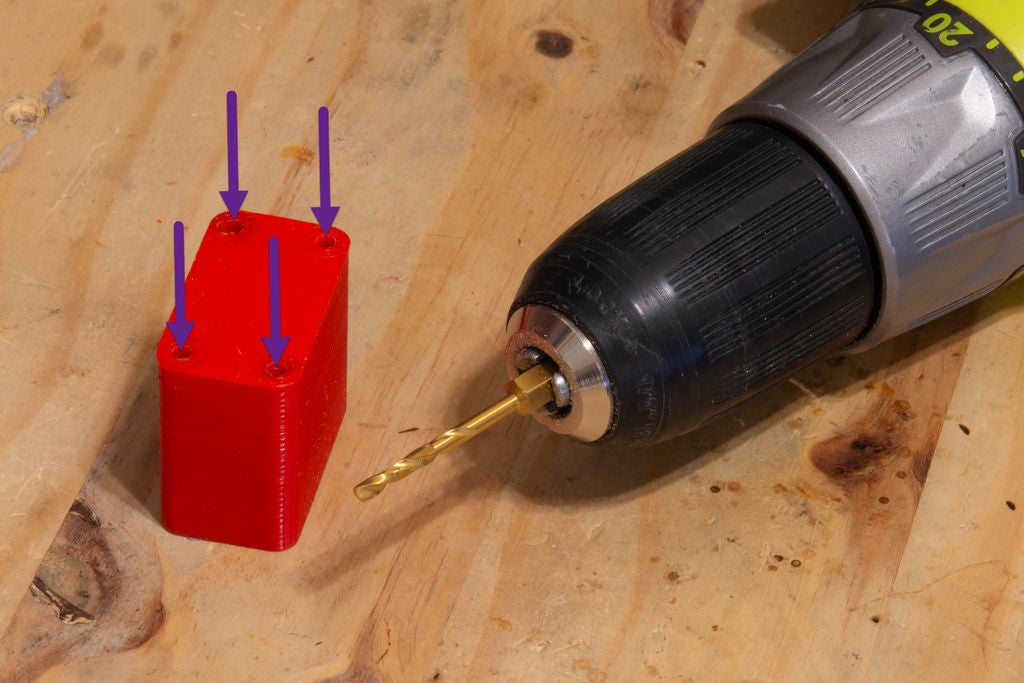
B。鉆通(4)1/8“孔伺服安裝座,請(qǐng)參見上圖中的紫色箭頭。鉆孔允許螺栓自由通過并稍后將伺服安裝座擰緊到導(dǎo)軌上。
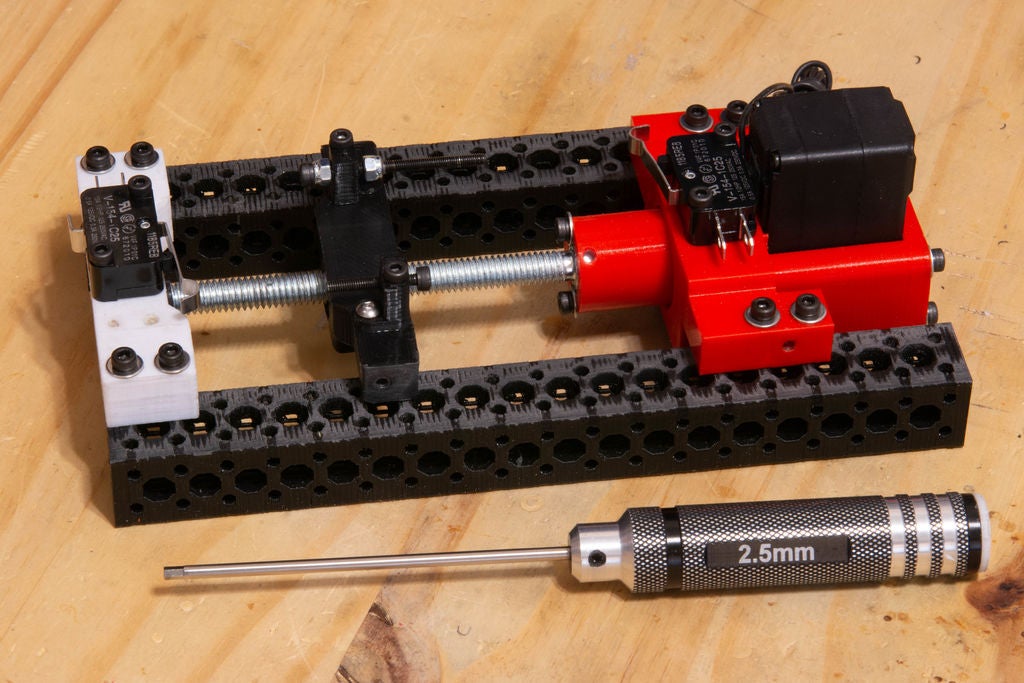
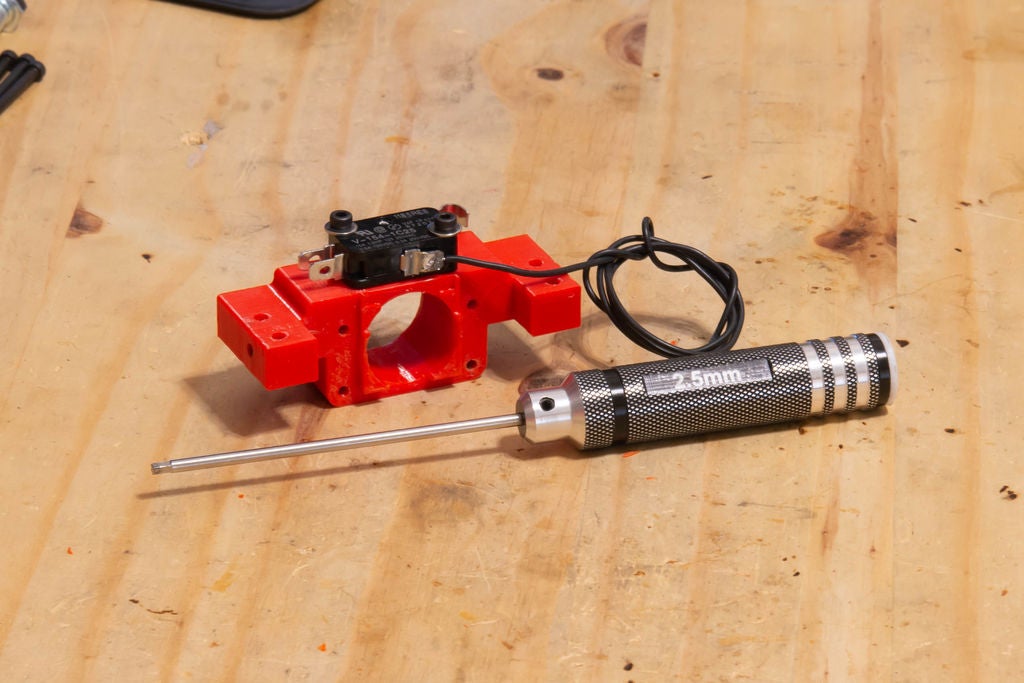
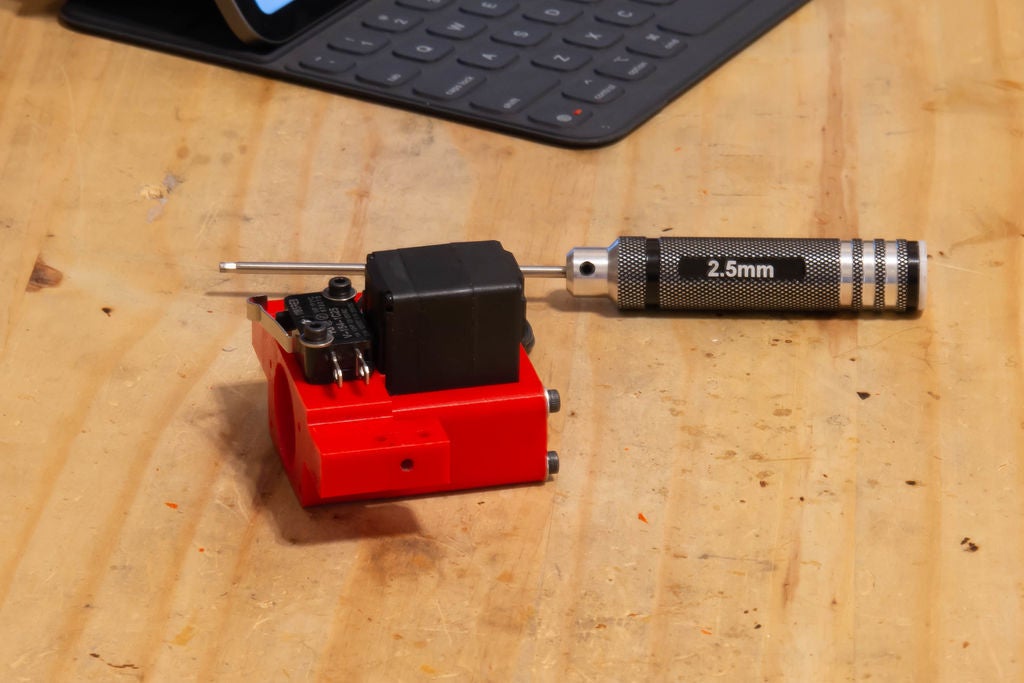
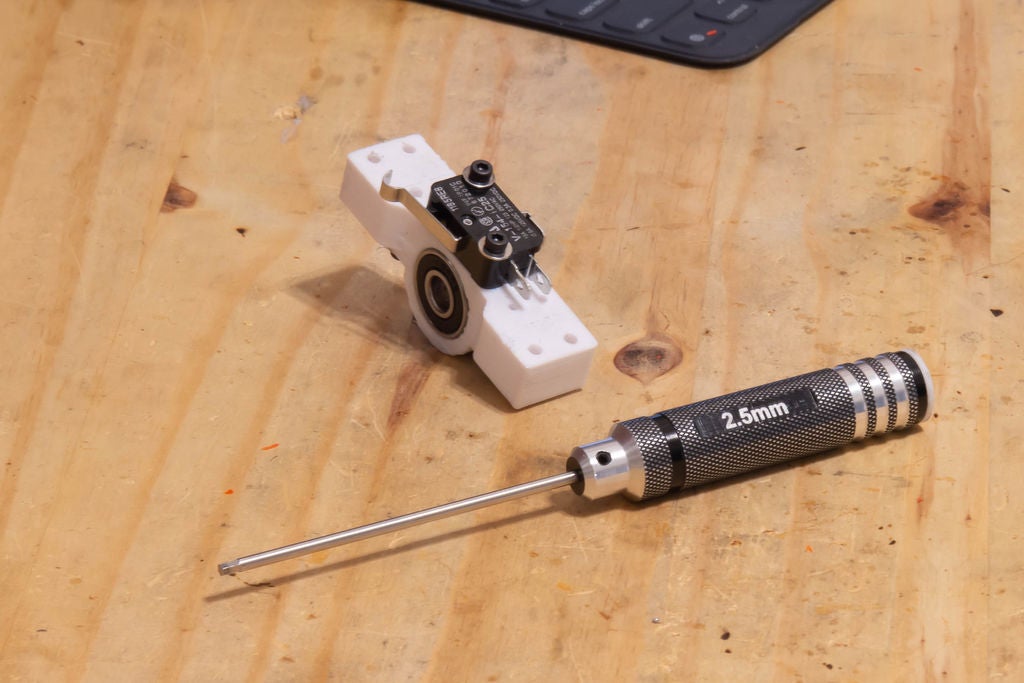
C。最后,如圖所示將限位開關(guān)安裝到伺服安裝座上(2) M3 x 16mm螺釘。
步驟4:下部電機(jī)螺釘安裝




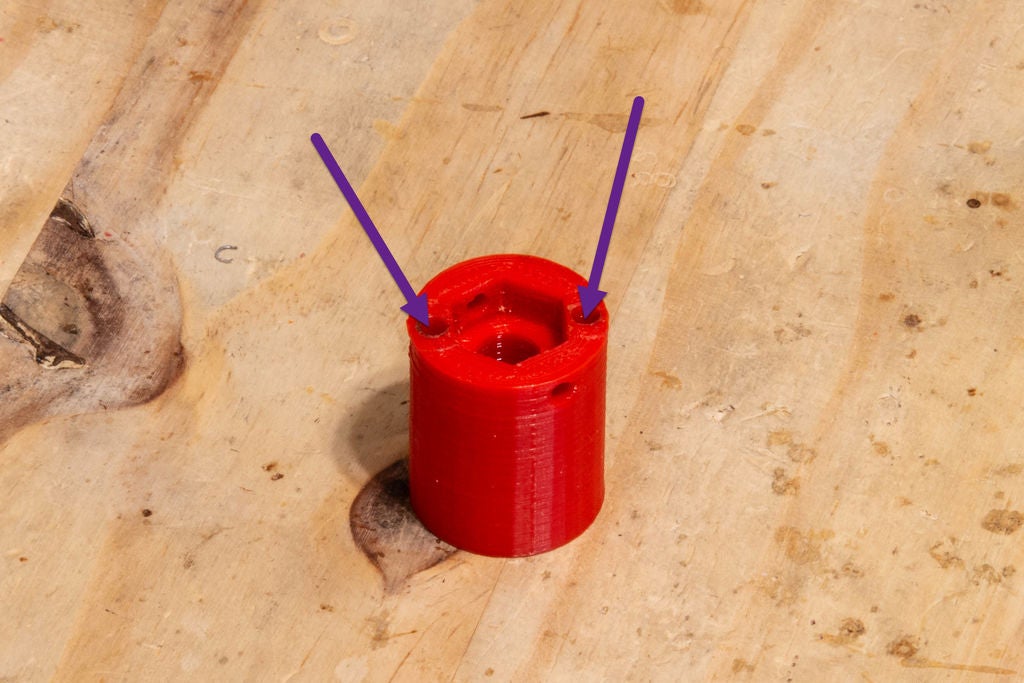
A。在下部電機(jī)螺絲安裝座中鉆出(5)1/8“孔,請(qǐng)參見上圖中的紫色箭頭。
B。然后使用(4)M3 x 12mm按鈕頭螺釘將下部Moto螺絲安裝座連接到金屬伺服喇叭。
C。最后,安裝下部電機(jī)螺釘使用(1)M3 x 10 mm螺釘安裝到伺服系統(tǒng)。
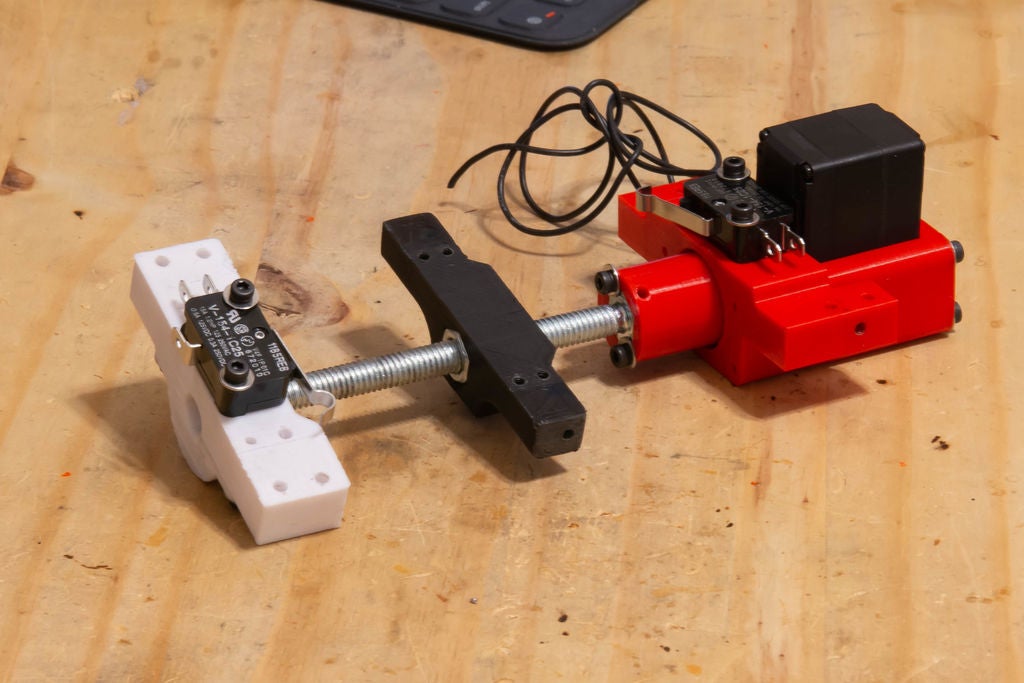
步驟5:安裝伺服和螺栓

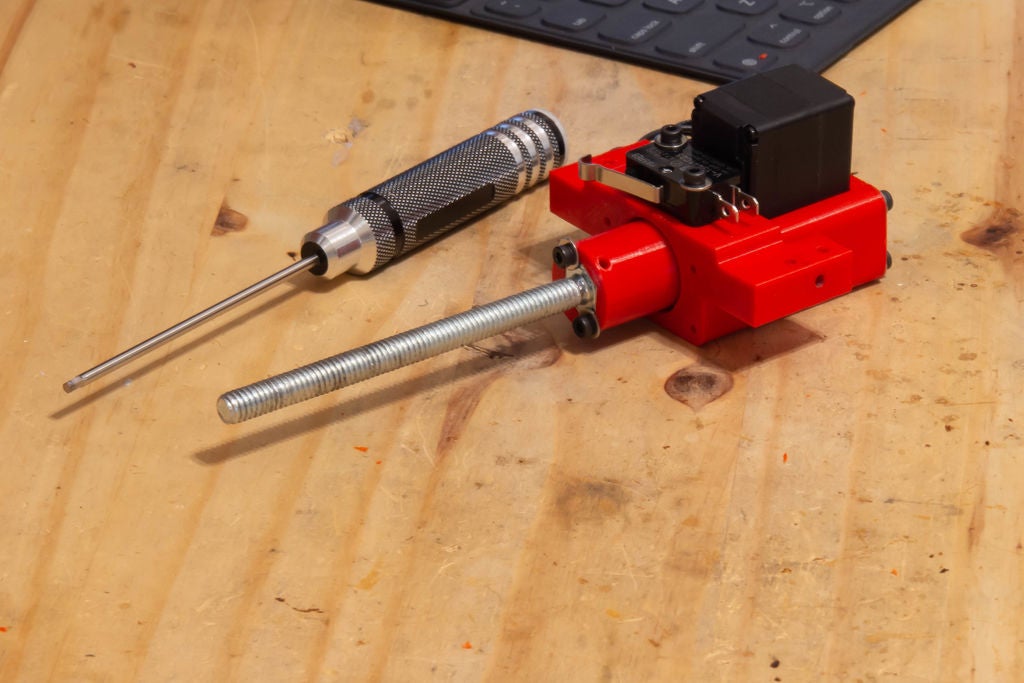
A。鉆取(4)1/8“后伺服安裝座上的孔如上圖所示,紫色箭頭表示。
B。鉆穿(2)1/8“孔螺絲安裝在上面照片中的紫色箭頭所示。注意:根據(jù)您打印的版本,您的顏色可能會(huì)更短。
C。將伺服器安裝到伺服安裝座上。你可能需要修剪一下以獲得合適的效果。它會(huì)有點(diǎn)松散。然后使用(4)M3 x 45mm螺釘和墊圈將后伺服安裝到前伺服安裝座。伺服器會(huì)左右搖擺而不是來回?fù)u擺。
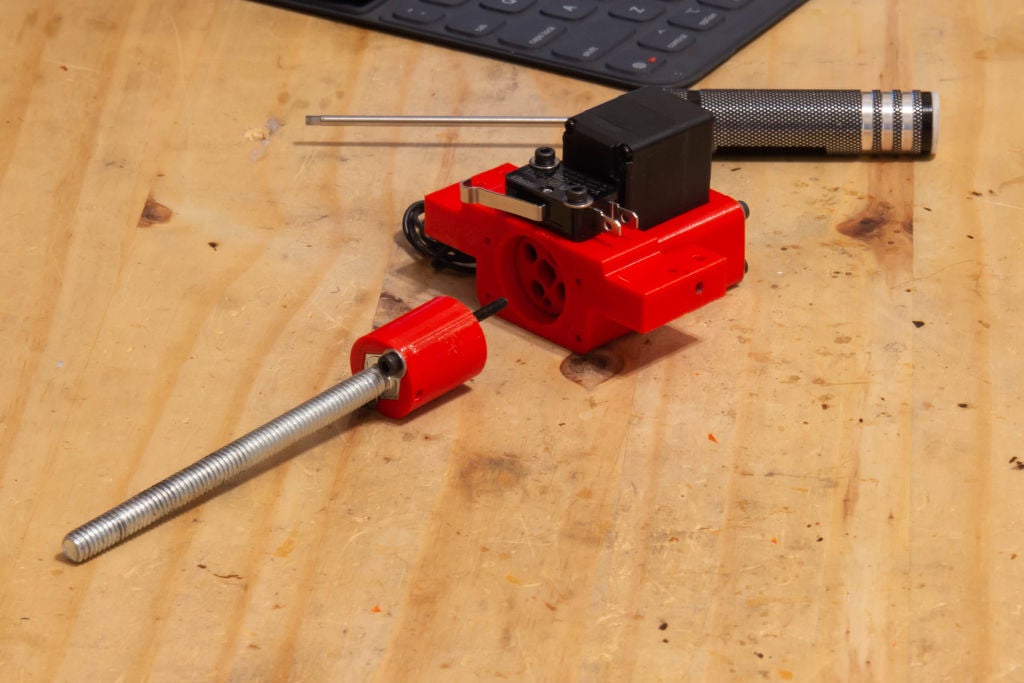
D。將5/16“x 5 - 1/2”螺栓插入上部螺釘安裝座;它應(yīng)該是一個(gè)舒適的合身。您可能需要稍微修剪開口以使其適合。
E。使用(2)M3 x 16mm螺栓和墊圈連接到螺絲安裝座的兩半。
F。您的組件應(yīng)該看起來像是最后一張照片。
第6步:滑塊和后部裝配

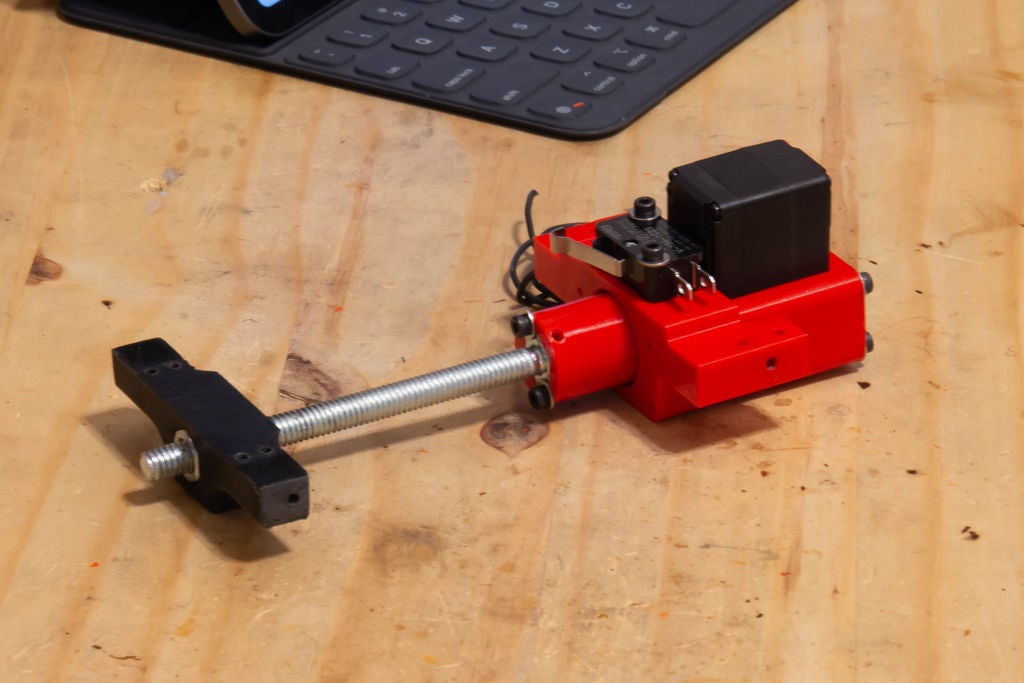
現(xiàn)在是時(shí)候安裝滑塊和后螺釘安裝座。
A。插入(2)5/16螺栓進(jìn)入滑塊。螺栓前后應(yīng)有一點(diǎn)間隙。沒有游隙,螺釘將在運(yùn)動(dòng)時(shí)結(jié)合。
B。將5/16螺栓上的滑塊擰緊幾英寸。
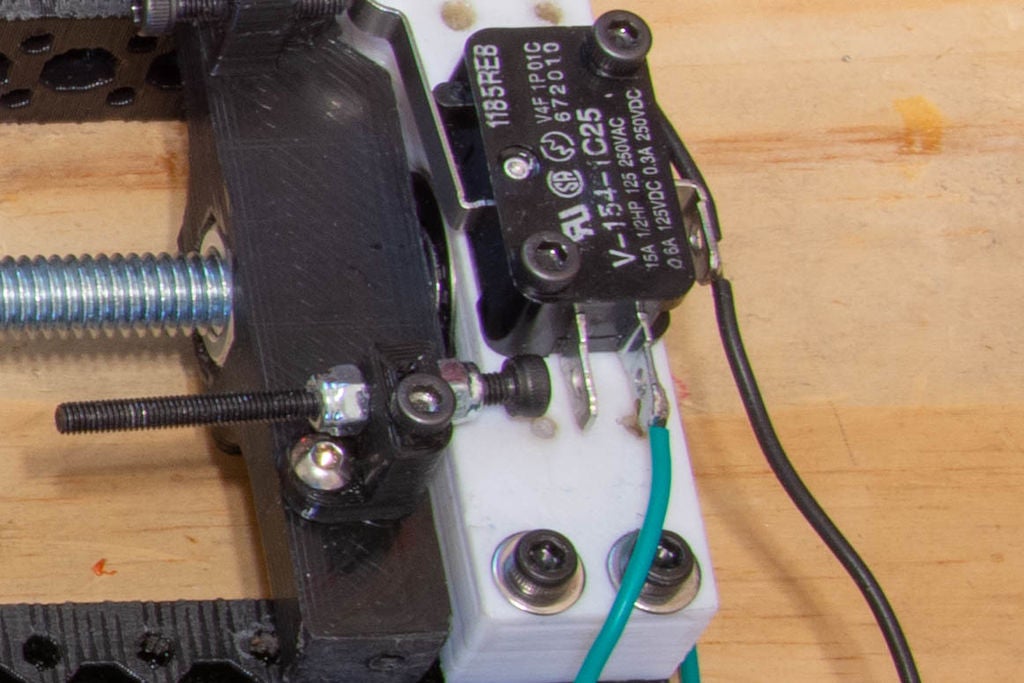
C。如圖中紫色箭頭所示,在后部螺釘安裝軸承蓋上鉆出(4)1/8“孔。
D。將8mm x 22mm x 7mm軸承插入后螺釘安裝座,并將軸承蓋安裝在(4)M3 x 12mm螺栓和墊圈上。
E。安裝(1)帶(2)M3 x 16mm螺栓的限位開關(guān)
F。將5/16“螺栓滑入軸承。注意:這里會(huì)有一堆游戲。您需要使用一塊電工膠帶或熱縮管來減少游隙量。測(cè)量下一步所需的量。
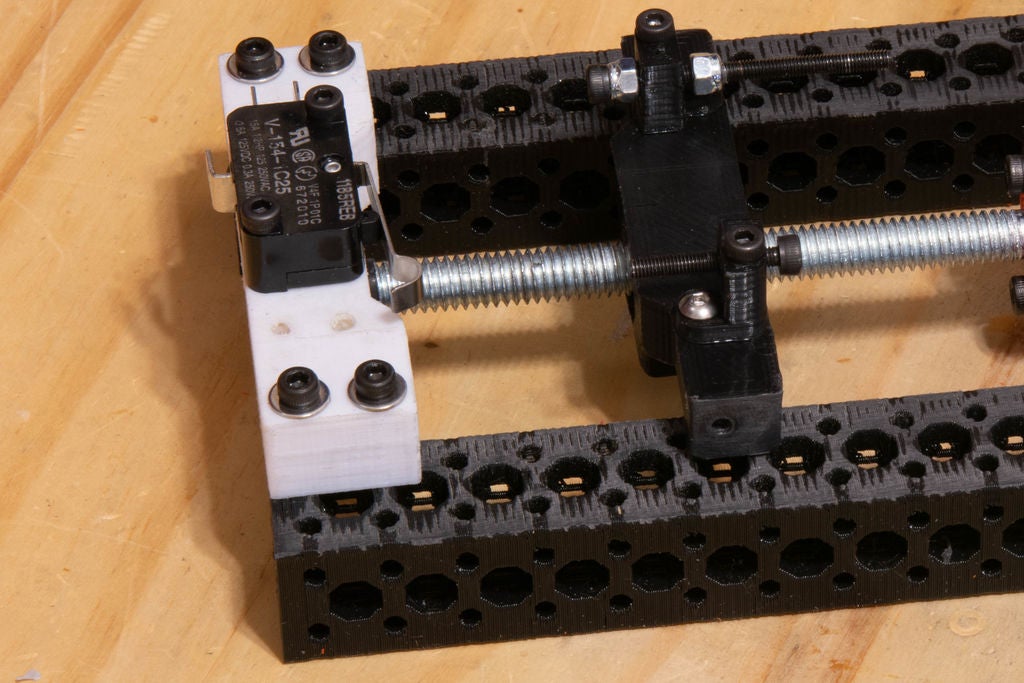
步驟7:完成下部裝配。
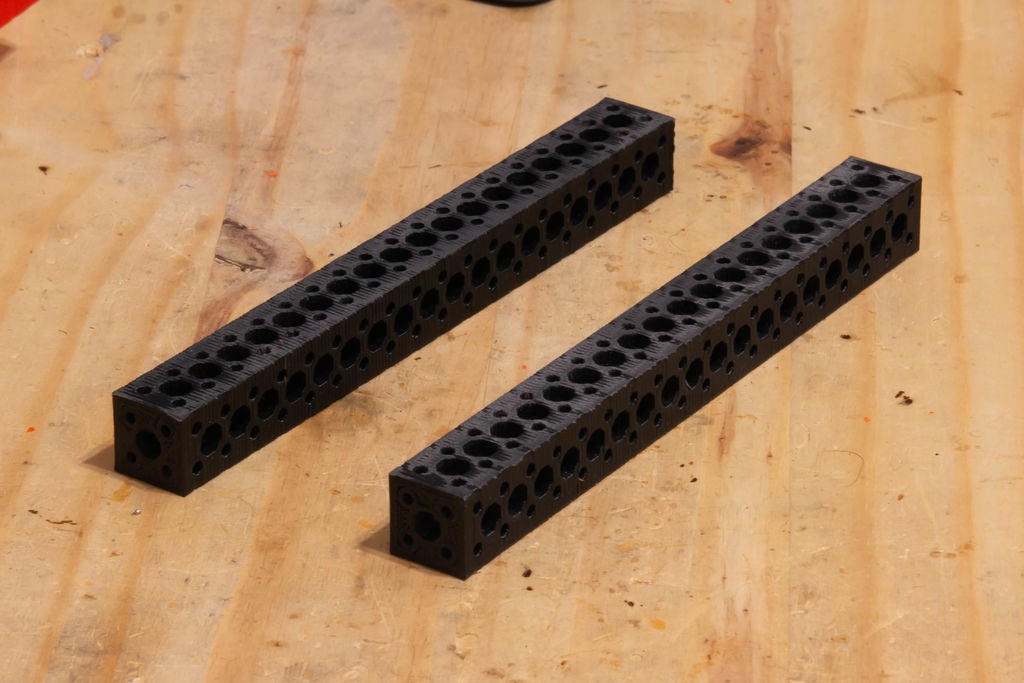
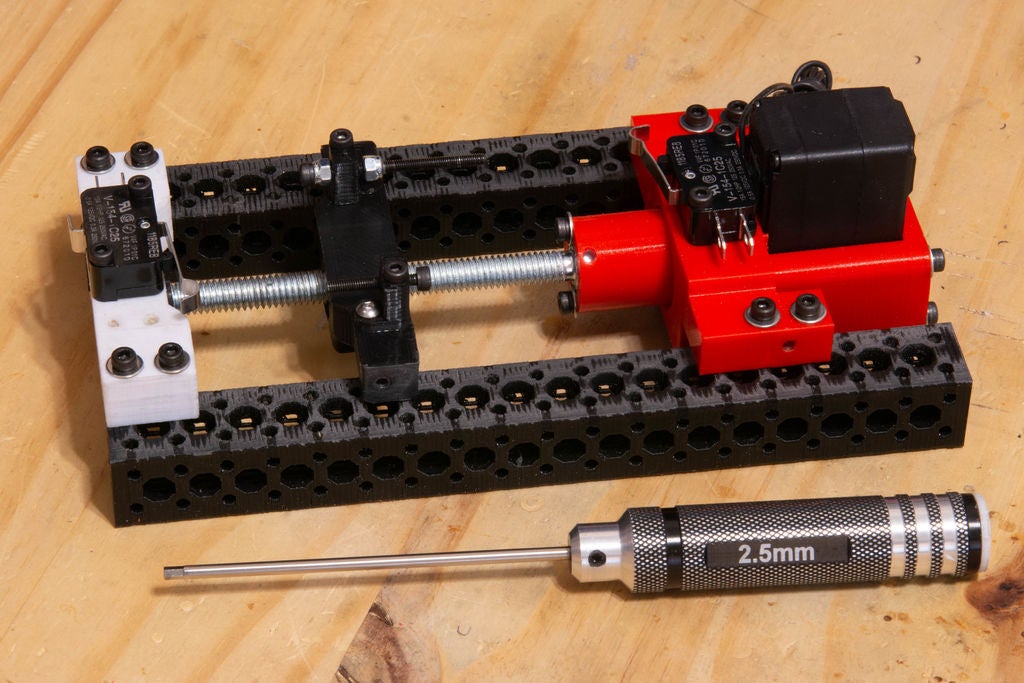
現(xiàn)在您已完成電動(dòng)組件,是時(shí)候?qū)⑵浒惭b到導(dǎo)軌上了。鐵軌是The Great Mojave Rover Project的一部分,可能看起來有點(diǎn)矯枉過正。我計(jì)劃將剪叉式升降機(jī)整合到火星車中,導(dǎo)軌設(shè)計(jì)允許我稍后這樣做。
A。每個(gè)導(dǎo)軌的一側(cè)平滑。您不需要打磨一堆,只需要將凸起弄平。
B。首先使用(4)M3 x 30mm螺栓擰緊后螺釘安裝座和墊圈。這應(yīng)該位于導(dǎo)軌末端齊平。
C。將5/16“螺栓插入軸承,將伺服安裝座插入第4個(gè)孔中(留空3個(gè))測(cè)量膠帶或熱收縮的位置。連接膠帶或熱縮并重新安裝組件。
D。將伺服組件擰到導(dǎo)軌上使用(4)M3 x 30mm螺栓和墊圈的第4個(gè)孔(離開3個(gè)空)注意您的伺服安裝座可能有點(diǎn)不同,我重新設(shè)計(jì)了更長(zhǎng)的5/16“螺栓。請(qǐng)仍然留空3洞。
現(xiàn)在您應(yīng)準(zhǔn)備好電動(dòng)組件,以便連接限位開關(guān)螺絲,并使Raspberry Pi來回移動(dòng)滑塊。
步驟8:限位開關(guān)調(diào)節(jié)器。


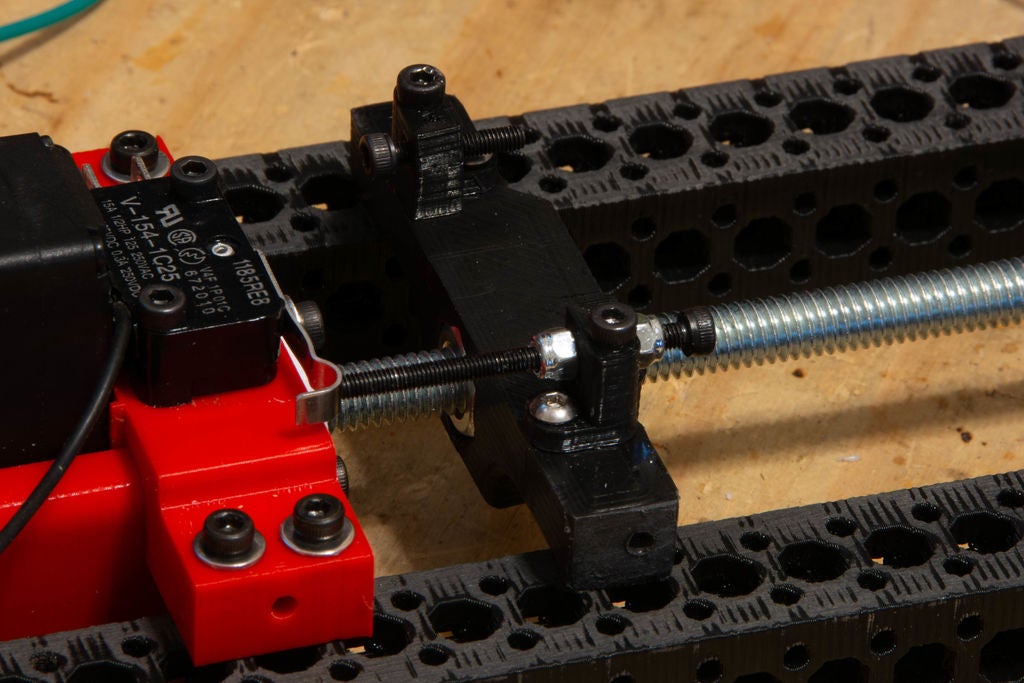
兩個(gè)限位開關(guān)調(diào)節(jié)器將啟動(dòng)您希望滑塊停止的開關(guān)。您需要在接合螺栓從上方通過的兩個(gè)位置使用按鈕頭螺釘進(jìn)行間隙。此外,兩個(gè)限位開關(guān)調(diào)節(jié)器3D打印部件都是相同的。
A。鉆(2)1/8“在每個(gè)限位開關(guān)上插入孔。
B。將按鈕頭螺釘插入接合器中。
C。在每個(gè)接合器中插入限位螺釘,(1) M3 x 20mm,另一個(gè)是(1)M3 x 40mm。
D。將限位開關(guān)接合器安裝到滑塊上。使用伺服側(cè)的較長(zhǎng)螺釘(40mm)
注意:我將鎖定螺母連接到我的長(zhǎng)接合器上,因?yàn)槲覄內(nèi)チ丝住?/p>
步驟9:連接Pi。
軟件因?yàn)檫@很簡(jiǎn)單,它只是簡(jiǎn)單地升高和降低升力。您可以編輯代碼以執(zhí)行任何您想要的操作,玩得開心。
我假設(shè)您已經(jīng)知道如何在Raspberry Pi上加載操作系統(tǒng)以及如何編寫簡(jiǎn)單的Python 3程序, Hello World示例就可以了。
這是一個(gè)很好的起點(diǎn),但是有很多資源可以開始使用。
設(shè)置你的Pi。
運(yùn)行你的第一個(gè)Pyhon程序。
步驟10:連接你的下部裝配。
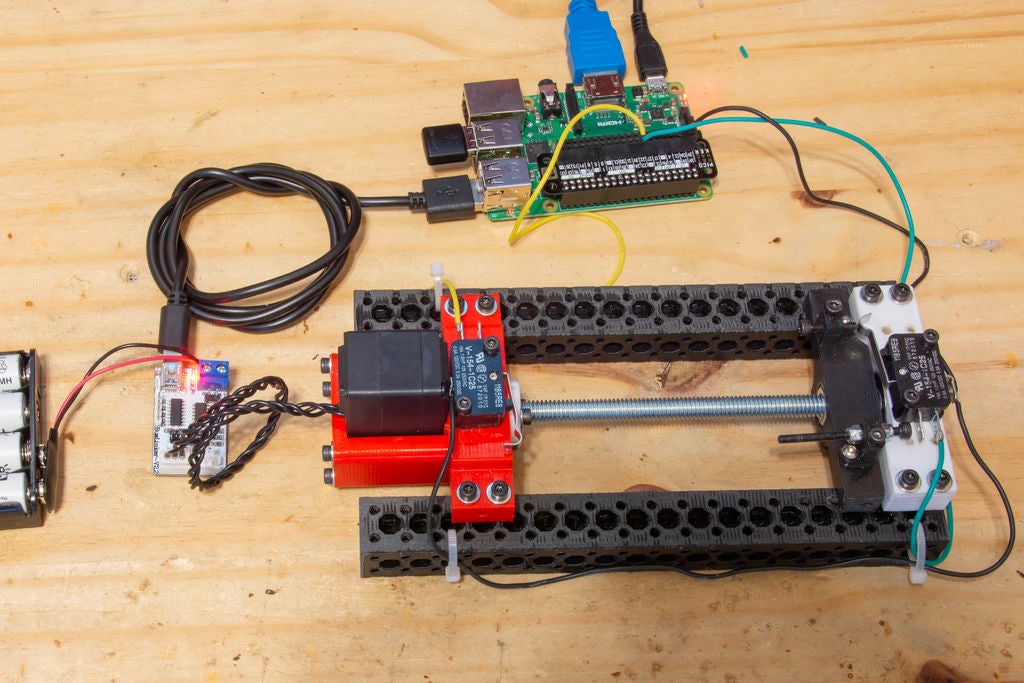

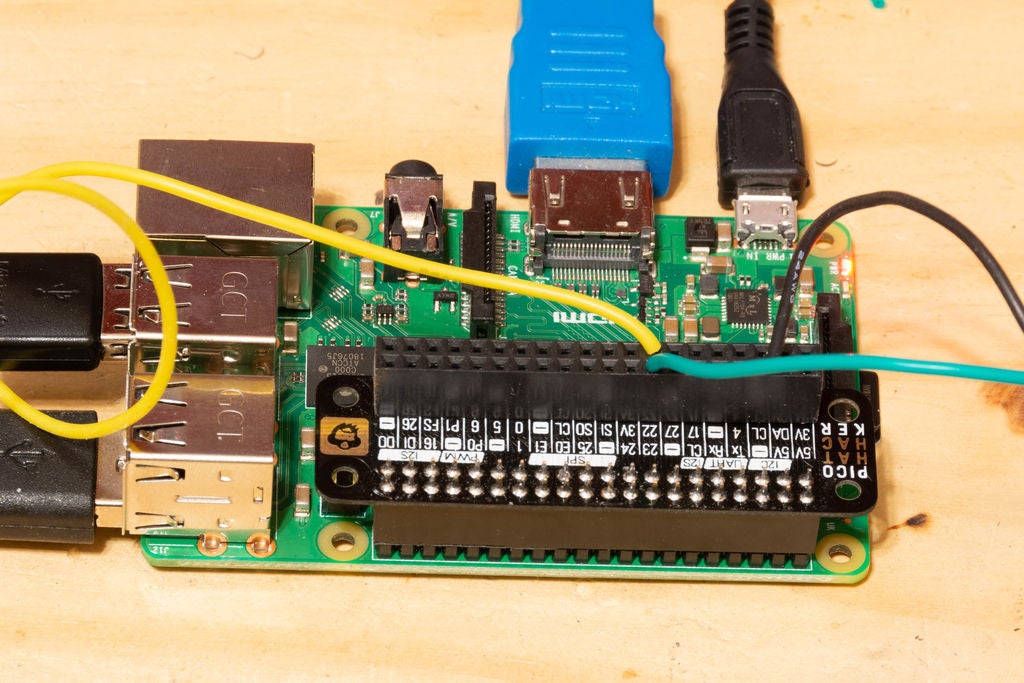
對(duì)于像這樣的小項(xiàng)目,我更喜歡在面包板上使用Pimoroni Pico HAT黑客板。你可以使用任何東西,但我喜歡這個(gè)小設(shè)備。我在HAT兩側(cè)的40針母頭上焊接,這允許我在任何一側(cè)使用(見第二張照片)。
警告:我已經(jīng)炸毀了一對(duì)Raspberry Pis這樣做Pi已啟動(dòng)。確保紅色為+且黑色為接地或 - ,伺服調(diào)試板內(nèi)置無保護(hù)。
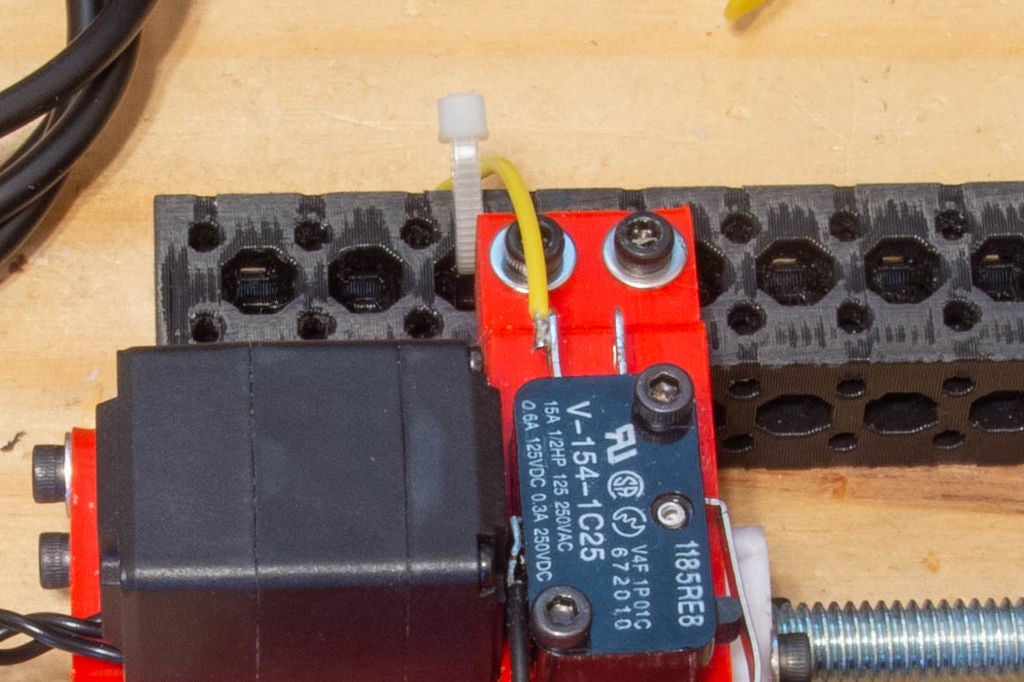
A. 將黑線連接到每臺(tái)交換機(jī)上的公共連接Pi的地面。 (第6針)
B 。將綠線連接到下限開關(guān)(參見第1張照片),然后連接到GPIO 23(引腳16)
C。將黃線連接到上限開關(guān)(參見第1張照片)然后轉(zhuǎn)到GPIO 22(針腳15)
E. 使用隨LX-16A伺服提供的電纜將伺服連接到伺服調(diào)試板
F. 連接電源到伺服調(diào)試板。請(qǐng)勿使用Pi為伺服板供電,請(qǐng)使用外接電池。我使用了4節(jié)AA電池。
步驟11:加載并運(yùn)行Python程序
我再次假設(shè)您知道如何啟動(dòng)終端并知道如何啟動(dòng)Python3程序。
A。啟動(dòng)終端
B. 我們需要克隆幾個(gè)庫GitHub上。第一個(gè)是Ethan Lipson的PyLX16A,另一個(gè)是來自BIMThoughts‘GitHub的Scissor Lift代碼
cd
git clone https://github.com/swimingduck/PyLX-16A.git
git clone https://github.com/BIMThoughts/ScissorLift.git
cd ScissorLift
cp 。./PyLX-16A/lx16a.py 。
上面的命令執(zhí)行以下操作:
cd 將目錄更改為主目錄
git clone 將代碼文件從GitHub下載到存儲(chǔ)庫名稱的文件夾中。
cd ScissorLift 將文件夾更改為ScissorLift代碼所在的位置
cp 。./PyLX-16A/ lx16a.py 。復(fù)制伺服命令所需的庫。
C 即可。您應(yīng)將Pi連接到電機(jī)組件,并將調(diào)試板連接到USB和伺服。
D。鍵入以下內(nèi)容以運(yùn)行開關(guān)測(cè)試。
cd
cd ScissorLift
python3 SwitchTest.py
程序?qū)㈤_始說“停機(jī)”。
將開關(guān)從伺服器進(jìn)一步接合,程序?qū)⒁浴吧仙表憫?yīng)。現(xiàn)在使用最接近伺服的開關(guān),程序?qū)⑼V埂?/p>
故障排除:
如果失敗請(qǐng)仔細(xì)檢查接線,我犯了錯(cuò)誤第一次將黃線焊接到錯(cuò)誤的開關(guān)連接,并在接合第一個(gè)開關(guān)后停止。
步驟12:電機(jī)測(cè)試
現(xiàn)在開關(guān)工作,是時(shí)候測(cè)試電機(jī)組件。
您已經(jīng)下載了代碼。讓我們開始。
A。確保您的伺服系統(tǒng)連接到調(diào)試板,任何插頭都能正常工作。
乙即可。從終端輸入以下內(nèi)容:
cd
cd ScissorLift
python3 MotorTest.py
您的滑塊將開始移動(dòng),當(dāng)首先朝向伺服時(shí),然后當(dāng)限位開關(guān)接合時(shí),它將向另一個(gè)方向移動(dòng)并在到達(dá)另一個(gè)限位開關(guān)時(shí)停止。
如果你聽到它開始綁定,拔掉來自調(diào)試板的伺服,然后按ctrl-c停止程序并確定它綁定的原因。
故障排除:
在幻燈片中間綁定:
a。螺母不會(huì)在滑塊內(nèi)自由移動(dòng)。
b。螺釘安裝座不居中。
c。軸承不是自由的。
滑動(dòng)結(jié)束時(shí)的綁定是由于開關(guān)未接線或需要調(diào)整嚙合螺釘引起的。
d。按ctrl-c后伺服繼續(xù)移動(dòng),拔掉伺服電線到調(diào)試板。這將重置伺服。
步驟13:剪刀裝配

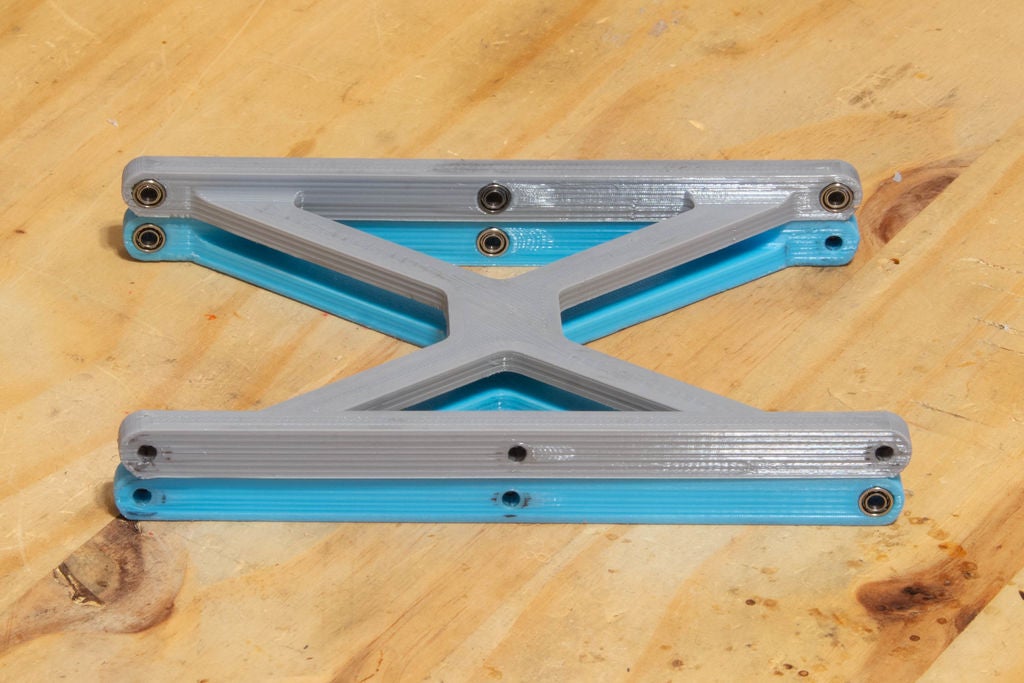




現(xiàn)在我們終于可以組裝剪刀了。剪刀有三個(gè)主要部件。
Scissor Outer(第一張照片,看起來像藍(lán)色冰棍棒)
Scissor Inner(第二張照片灰色)
剪刀內(nèi)底(第二張照片藍(lán)色)
Scissor Inner和Scissor Inner Bottom之間的區(qū)別在于軸承的位置,如照片右側(cè)所示。 觀看視頻更容易在那里解釋。
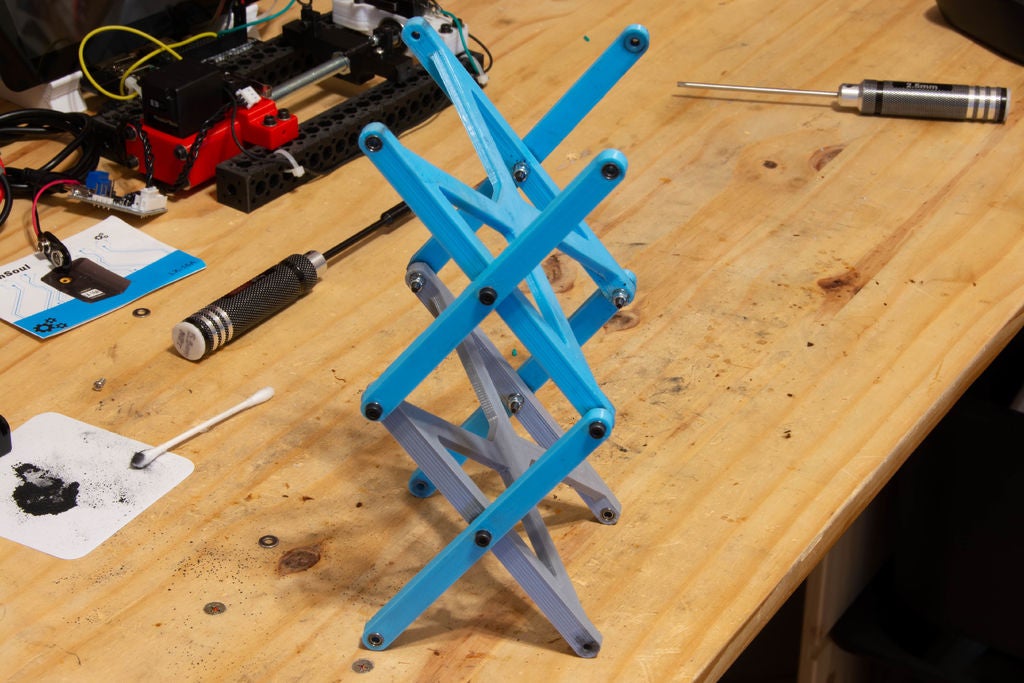
A。將軸承插入每個(gè)Scissor件中。您可能需要使用螺栓,墊圈和螺母將墊圈壓入槽中。如果您打破了插槽,可以使用膠水來修復(fù)它。
B 。使用石墨潤(rùn)滑劑和棉簽,涂在剪刀的非承重面上。
C 。使用M3 x 20mm螺釘,墊圈和鎖緊螺母。從內(nèi)底開始將剪刀外部連接到中間連接。 (見圖)
D 。將另一個(gè)外剪刀連接到底部剪刀的末端,其中軸承位于內(nèi)側(cè)。然后將另一個(gè)內(nèi)部剪刀連接到中間。
E。繼續(xù)連接內(nèi)外剪刀,直到用完剪刀。
步驟14 :將剪刀安裝到底座上。

使用(2)M3 x 20mm,帶(2)個(gè)墊圈和3d打印空間將剪刀組件連接到伺服支架上基座。
使用(2)M3 x 12mm將剪刀組件連接到滑塊。
除了平臺(tái),你有一個(gè)工作剪叉式升降機(jī)。
步驟15:剪刀運(yùn)行測(cè)試
連接你的剪叉式升降機(jī)如果你還沒有這樣做,請(qǐng)回到Raspberry Pi。
A。從Raspberry Pi上的終端再次運(yùn)行MotorTest.py并看到你的剪叉式升降機(jī)。
繼續(xù)關(guān)注:
任何綁定
限制嚙合螺釘?shù)拈g隙
如果綁定或發(fā)生某些事情,請(qǐng)先從調(diào)試板上拔下伺服電源。
步驟16:附加平臺(tái)

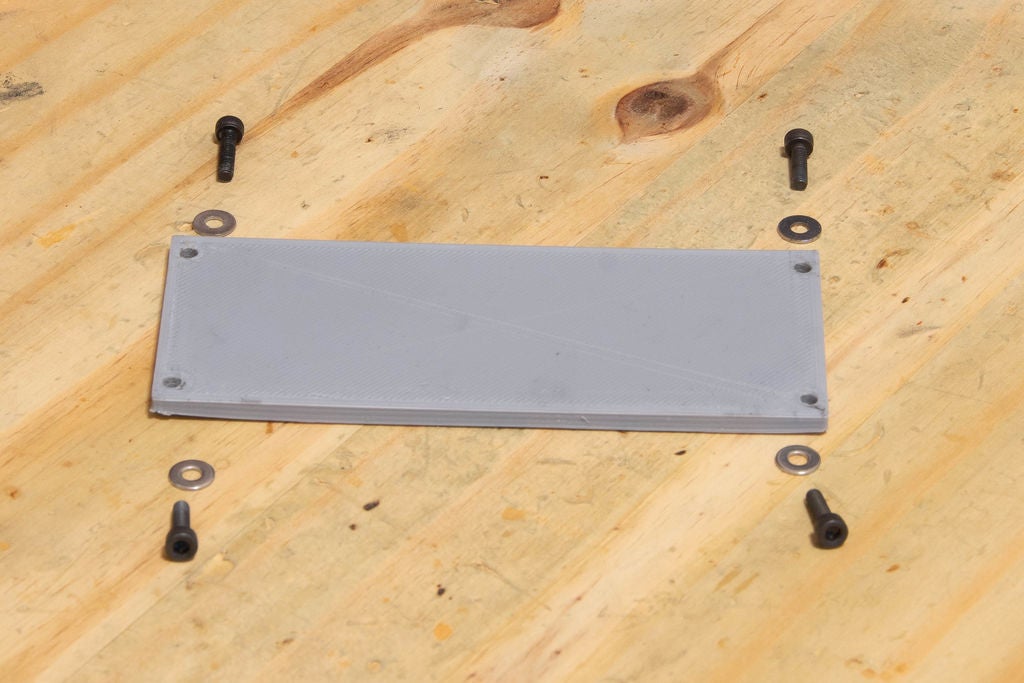

希望通過現(xiàn)在你想出了如何放置平臺(tái)。
A。確定你想要平臺(tái)的最終目的。
B. 將平臺(tái)導(dǎo)軌安裝到剪刀頂部的外側(cè)。在需要墊片的一側(cè),您需要一個(gè)M3 x 25mm螺釘和2個(gè)墊圈。另一方面,使用帶有1個(gè)墊圈和1個(gè)鎖緊螺母的M3 x 20mm螺釘。
C。使用M3 x 12mm螺釘和墊圈將平臺(tái)頂部連接到導(dǎo)軌上。
-
升降機(jī)
+關(guān)注
關(guān)注
0文章
28瀏覽量
10804 -
樹莓派
+關(guān)注
關(guān)注
121文章
1936瀏覽量
106941
發(fā)布評(píng)論請(qǐng)先 登錄
樹莓派“吉尼斯世界記錄”:將樹莓派的性能發(fā)揮到極致的項(xiàng)目!

能夠精準(zhǔn)定位的樹莓派機(jī)器人!
解鎖樹莓派集群:一步步打造你的超級(jí)計(jì)算陣列!
Homey Pro由樹莓派 Compute Module 4 供電
超酷的樹莓派智能鏡項(xiàng)目,快來了解!
GPIO在樹莓派中的應(yīng)用
使用樹莓派實(shí)現(xiàn)遠(yuǎn)程控制的技巧
樹莓派與Arduino的區(qū)別是什么
樹莓派gpio有什么用,樹莓派gpio接口及編程方法
什么是樹莓派?樹莓派是什么架構(gòu)的
類樹莓派網(wǎng)關(guān):物聯(lián)網(wǎng)應(yīng)用的新標(biāo)桿






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論