 如何制作智能手機控制的Arduino機器人車
如何制作智能手機控制的Arduino機器人車
第1步:所需的零件和工具
1。 4WD機器人底盤套件
2。 Arduino Uno
3。 LM298 H橋模塊
4。藍牙模塊HC-05
5。 12v鋰電池
6。男女跳線
7。男 - 男跳線
8。管道膠帶或任何其他膠帶9.智能手機
步驟2:結構/機箱
您可以購買現成的4WD汽車底盤或者您可以使用PVC/任何類型的硬板制作它。
步驟3:電機/執行器
在此項目我使用6v直流電機。您可以使用任何類型的6v直流電機。
步驟4:準備電機端子
切割4根長度約為5至6英寸的紅色和黑色電線。
可以使用0.5平方毫米的電線。
去除絕緣層從每端的導線焊接電線到電機端子
您可以通過將電機連接到電池組來檢查電機極性。如果它正向旋轉(紅線帶正極和黑線帶負極電池的端子)然后連接正確。
步驟5:安裝電機并安裝頂部頂蓋
步驟6:控制器
Arduino UNO是一個開源微控制器該板基于Microchip ATmega328P微控制器,由Arduino.cc開發。
該板配有多組數字和模擬輸入/輸出(I/O)引腳,可與各種擴展板連接rds(盾牌)和其他電路。該板具有14個數字引腳,6個模擬引腳,可通過B型USB電纜與Arduino IDE(集成開發環境)進行編程。它可以通過USB電纜或外部9伏電池供電,但它可以接受7到20伏之間的電壓。它也類似于Arduino Nano和Leonardo。硬件參考設計在Creative Commons Attribution Share-Alike 2.5許可下分發,可在Arduino網站上獲得。還提供某些版本硬件的布局和生產文件。 “Uno”意為意大利語,并被選中用于標記Arduino Software(IDE)1.0的發布。 Arduino軟件(IDE)的Uno板和版本1.0是Arduino的參考版本,現在已經發展到新版本。 Uno板是USB Arduino板系列中的第一塊,也是Arduino平臺的參考模型。 Arduino Uno上的ATmega328預編程了一個引導加載程序,允許在不使用外部硬件編程器的情況下上傳新代碼。[3]它使用原始STK500協議進行通信。 Uno與所有前面板的不同之處在于它不使用FTDI USB到串行驅動芯片。相反,它使用編程為USB轉串口轉換器的Atmega16U2(Atmega8U2至R2版本)。
微控制器通常使用編程語言C和C ++的功能方言進行編程。除了使用傳統的編譯器工具鏈之外,Arduino項目還提供了基于Processing語言項目的集成開發環境(IDE)。
步驟7:H Bridge(LM 298模塊)
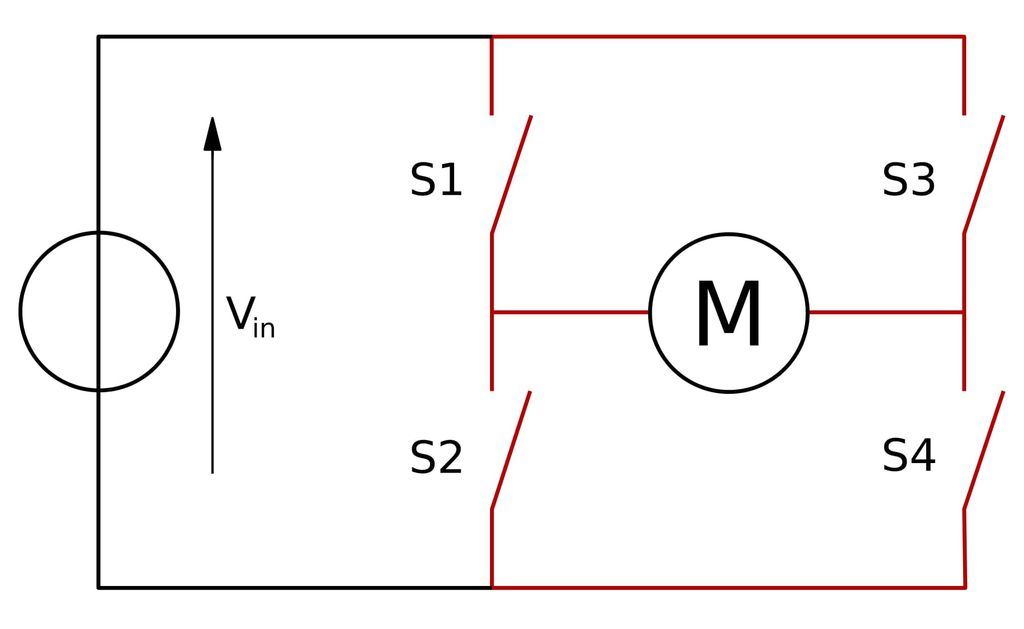
什么是H橋?
術語H橋是從這種電路的典型圖形表示中得出的。它是一個可以正向和反向驅動直流電機的電路。工作:請參見上圖了解H橋的工作情況。
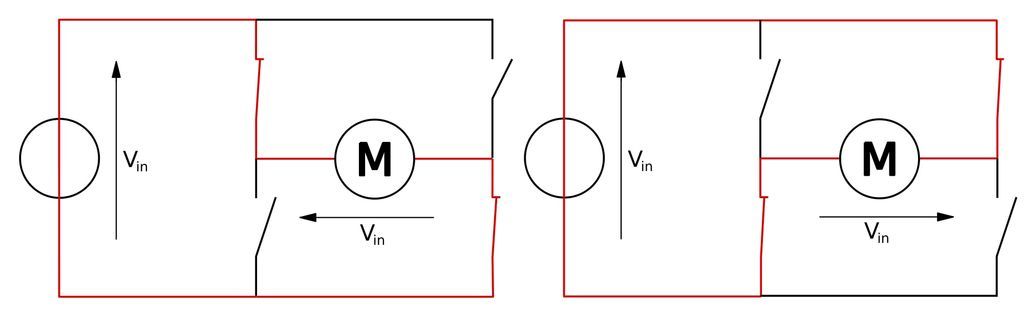
它由4個電子開關S1,S2,S3和S4(晶體管/MOSFET/IGBTS)組成。當開關S1和S4閉合(并且S2和S3斷開)時,將在電動機上施加正電壓。因此它向前旋轉。類似地,當S2和S3閉合并且S1和S4打開時,反向電壓在電機上施加,因此反向旋轉。
注意:同一臂(S1,S2或S3,S4)中的開關永遠不會同時閉合,會導致死機短路。 H橋可用作集成電路,或者您可以使用4個晶體管或MOSFET構建自己的橋。在我們的例子中,我們使用LM298 H橋IC,可以控制電機的速度和方向。
引腳說明:
輸出1:直流電機1“+”或步進電機A +
輸出2:直流電機1“ - ”或步進電機A-
輸出3:直流電機2“+ “或步進電機B +
輸出4:電機B導出
12v引腳:12V輸入但可以使用7至35V
GND:接地
5v引腳:5V輸出,如果12V跳線到位,非常適合為Arduino(等)供電
EnA:為電機A啟用PWM信號(請參閱“Arduino草圖注意事項”部分)
IN1:使能電機A
IN2:使能電機A
IN3:使能電機B
IN4:使能電機B
EnB:為電機B啟用PWM信號
步驟8:電源
可以使用這些電池:
1。 AA堿性電池(不可充電)
2。 AA NiMh或NiCd電池(可充電)
3。鋰離子電池
4。 LiPo電池
步驟9:電氣接線
對于接線,您需要一些跳線。
連接兩個電機的紅線(每側) )將黑線連接在一起。
所以最后你的每一面都有兩個端子。 MOTORA負責兩個右側電機,相應地兩個左側電機連接到MOTORB按照以下說明連接所有電源。
電機連接:
Out1 - 》左側電機紅線(+)
Out2 - 》左側電機黑線( - )
Out3 - 》右側電機紅線(+)
Out4 - 》右側電機黑線( - )
LM298 - 》 Arduino
IN1 - 》 D5
IN2-》 D6
IN2 - 》 D9
IN2-》 D10
藍牙模塊 - 》 Arduino
Rx-》 Tx
Tx - 》 Rx
GND - 》 GND
Vcc - 》 3.3V
電源:
12V - 》連接電池紅線
GND - 》連接電池黑線和Arduino GND引腳
5V - 》連接到Arduino 5V引腳
步驟10:控制邏輯
步驟11:軟件
軟件部分非常簡單,它不需要任何庫。如果您在前面的步驟中理解了邏輯表,那么您可以編寫自己的代碼。我沒有花太多時間編寫代碼,所以只使用別人編寫的代碼。為了控制機器人車,我正在使用智能手機。智能手機通過藍牙模塊連接到控制器(HC -06/05)下載應用程序安裝應用程序后,您必須將其與藍牙模塊配對。配對密碼為“1234”。
第12步:Arduino代碼
==》 Arduino代碼
-
智能手機
+關注
關注
66文章
18602瀏覽量
182841 -
機器人
+關注
關注
212文章
29401瀏覽量
211238 -
Arduino
+關注
關注
188文章
6488瀏覽量
189947
發布評論請先 登錄
盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
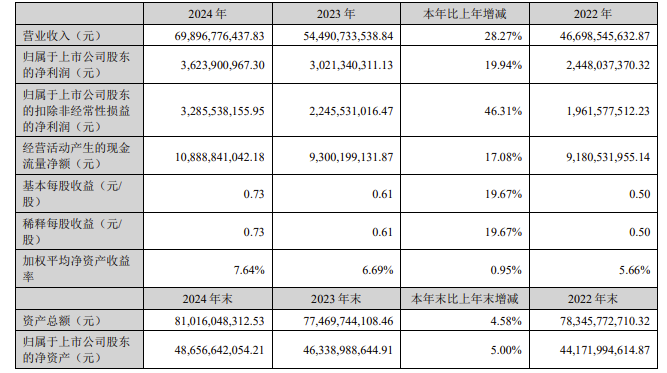
智能手機業務狂攬577億!藍思科技押注AI與機器人,凈利暴漲近20%





 工商網監
工商網監
評論