") 關(guān)于車道檢測(cè)與跟蹤方案設(shè)計(jì)的研究和概述
關(guān)于車道檢測(cè)與跟蹤方案設(shè)計(jì)的研究和概述
車道檢測(cè)的目標(biāo):
1. 車道形狀,包括寬度、曲率等幾何參數(shù)
2. 車輛在車道中的位置,包括橫向偏移量,車輛與道路的夾角(偏航角)
車道檢測(cè)與跟蹤一般分為以下幾個(gè)部分:
1. 車輛、道路、相機(jī)模型
2. 道路特征提取
3. 道路參數(shù)計(jì)算,如曲率,
4. 車道跟蹤
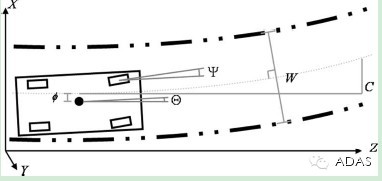
車輛、道路、相機(jī)模型
在現(xiàn)代道路設(shè)計(jì)中,道路有比較固定的設(shè)計(jì)模型,因此,對(duì)于高速公路等道路類型,車道的幾何模型可以以固定的形式表示。
車道弧長、曲率、偏航角、橫向偏移量構(gòu)成車輛與車道幾何模型的要素。
車道一般由直線、圓弧和緩和曲線構(gòu)成,緩和曲線通常是不同曲率的圓弧或直線的連接過渡,其曲率均勻變化,螺旋曲線是緩和曲線常用形式。
道路曲率與弧長(路長)的關(guān)系:
C = C0 + C1*L.
C0為起始點(diǎn)曲率,C1為曲率變化率。C0,C1都為0時(shí),直線; C1為0時(shí),C0不為0,圓弧;C1不為0時(shí),緩和曲線。
在世界坐標(biāo)系下,或俯視圖下,在相機(jī)可視范圍內(nèi),若車道的變化方向較小,則道路可用圓弧近似表示:
道路的坐標(biāo)可以由弧長和曲率一般表示為:
y = L
x = 0.5*C*L^2
若相機(jī)與車道的橫向偏移量為d,與車道的夾角為a,則車道模型為
y = L
x = d + a*L + 0.5*C*L^2
從公式來看,這是一個(gè)拋物線模型。這里沒有考慮曲率變換率,即忽略了高次項(xiàng)(C1*L^3)/6。
不同的系統(tǒng)要求與道路環(huán)境,道路模型的精度要求也不同。在較早的系統(tǒng)里,在大路(highway)環(huán)境下,
基于視覺的車道模型經(jīng)歷了,平行直線模型 --> 固定曲率圓弧模型 --> 螺旋曲線模型。道路模型的精度不斷提高。
使用哪種模型,要根據(jù)系統(tǒng)的實(shí)際需求。如早期的系統(tǒng)里,檢測(cè)大路(highway)中10米內(nèi)的車道狀況,應(yīng)用簡單的線性模型即可。而車道偏離告警(LDW)系統(tǒng)中,在高速公路上,需要30米-40米的精確的道路模型,這時(shí),螺旋曲線(高階)或拋物線(二階)模型就更為精確。
相機(jī)模型:
由圖像的二維信息恢復(fù)出場(chǎng)景的三維信息,就需要相機(jī)模型來確立兩者之間的對(duì)應(yīng)關(guān)系。相機(jī)參數(shù)包括內(nèi)部參數(shù)和外部參數(shù)。相機(jī)模型分為針孔相機(jī)模型和透鏡畸變擴(kuò)展模型。這些在另外一篇文章里有描述。相機(jī)的內(nèi)外參數(shù)通過標(biāo)定都可以獲取。相機(jī)的外部參數(shù)體現(xiàn)了相機(jī)坐標(biāo)下圖像與世界坐標(biāo)下場(chǎng)景的齊次變換關(guān)系。
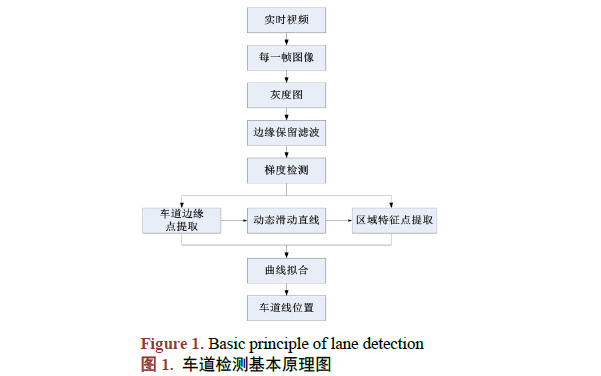
道路特征檢測(cè)
道路上車道標(biāo)志的檢測(cè)是道路特征檢測(cè)的關(guān)鍵部分,并且已有很多算法,但道路場(chǎng)景太多,單一的算法還是無法適用所有的場(chǎng)景。算法分類:
| 適用場(chǎng)景 | 不適用場(chǎng)景 | |
| 基于邊緣檢測(cè) | 虛線、實(shí)線明顯 | 陰影、光照變化、反射不均勻 |
| 基于頻域技術(shù) | 能處理反射不均的場(chǎng)景 | 陰影 |
| 基于路面紋理/模板 | 陰影、光照不均等 | 反射不均 |
基于邊緣檢測(cè)的常用算法有:
Sobel, DOG, LOG, Steerable Filter等。每種算法都有各自的優(yōu)缺點(diǎn)。這里不再描述。
由基本算法處理后得到道路的特征圖像,這里以邊緣為例,需要進(jìn)一步分析其特性,去除干擾,保留符合車道特征的邊緣。如平行性、寬度等結(jié)構(gòu)特征。如果這些結(jié)構(gòu)特征分析做的好,也可以彌補(bǔ)基本算法的不足。
其他檢測(cè)方法:
雙閾值特征檢測(cè):原圖像、梯度圖像(邊緣圖像)分別有各自的閾值,分割出車道標(biāo)志特征,當(dāng)某點(diǎn)的灰度和梯度值分別大于各自的閾值時(shí),才被選取為車道的特征點(diǎn),這個(gè)方法會(huì)去掉一些陰影等干擾。
可調(diào)濾波器steerable filter:
對(duì)原圖分別獲取Gxx, Gyy, Gxy,高斯二階分量。角度可變的濾波器的強(qiáng)度響應(yīng)如下:

求上式的極值,則需求角度的導(dǎo)數(shù),則能獲取兩個(gè)角度
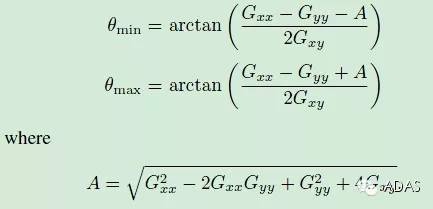
對(duì)于濾波器窗口內(nèi)圓形對(duì)稱的物體,則兩個(gè)角度的響應(yīng)差不多;而對(duì)車道,兩個(gè)角度響應(yīng)的差值就比較大,響應(yīng)大的方向就是車道方向,車道方向也可以探測(cè)出。
道路參數(shù)計(jì)算
道路方向、曲率的計(jì)算。霍夫變換是常用的檢測(cè)直線的方法,還有其他方法篩選特征計(jì)算參數(shù)的方法,如最小二乘估計(jì),RANSAC,這些方法基本上都設(shè)定了道路模型,由特征點(diǎn)來計(jì)算參數(shù)。但也可以由計(jì)算出的模型,去除不符合條件的特征。
跟蹤
一般跟蹤的作用就是預(yù)測(cè)下一幀圖像內(nèi)道路特征的位置,在一個(gè)較小的范圍內(nèi)檢測(cè)道路特征,提高效率。若預(yù)測(cè)范圍內(nèi)沒有檢測(cè)到道路特征,則采用估計(jì)或上一幀特征的位置,若連續(xù)幾幀都沒有檢測(cè)到道路特征,則啟動(dòng)全圖像道路特征檢測(cè)。KalmanFilter是常用的跟蹤算法。
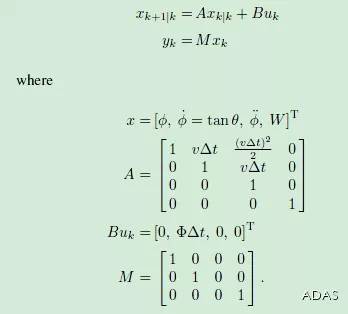
車道的狀態(tài)要考慮車道的位置、速度、偏航角及車輛行駛轉(zhuǎn)角之間的關(guān)系。

夾角增量 = 曲率 * 長度
狀態(tài)變量為道路弧長、車道夾角、道路曲率、車道寬度
車輛的行駛轉(zhuǎn)角作為控制輸入變量。
測(cè)量變量為道路弧長和車輛與道路的夾角。
則狀態(tài)轉(zhuǎn)移方程如下:
AWS汽車防撞系統(tǒng)-傍晚效果
-
濾波器
+關(guān)注
關(guān)注
162文章
8065瀏覽量
180958 -
車道檢測(cè)
+關(guān)注
關(guān)注
0文章
5瀏覽量
1663
發(fā)布評(píng)論請(qǐng)先 登錄
一種人體體溫自動(dòng)檢測(cè)監(jiān)護(hù)系統(tǒng)的設(shè)計(jì)研究
如何檢測(cè)并統(tǒng)計(jì)多車道的車流信息?
基于圖像的車道線檢測(cè)
如何實(shí)現(xiàn)光伏發(fā)電光照自動(dòng)跟蹤系統(tǒng)總體方案設(shè)計(jì)?
實(shí)時(shí)車輛檢測(cè)和跟蹤系統(tǒng)設(shè)計(jì)

基于邊界特征的車道標(biāo)識(shí)線檢測(cè)方法

耳溫槍設(shè)計(jì)方案設(shè)計(jì)
如何使用動(dòng)態(tài)曲線進(jìn)行車道檢測(cè)算法的資料概述.
淺談ADAS-LDW車道檢測(cè)與跟蹤方法的算法實(shí)例代碼

ADAS車道偏離檢測(cè)技術(shù)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論