基于改進人工勢場法的路徑規劃
大小:1.68 MB 人氣: 2017-11-06 需要積分:0
標簽:路徑規劃(15294)
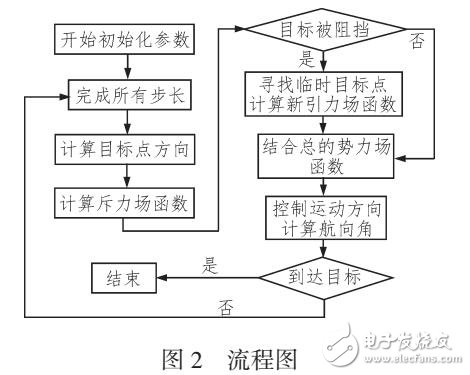
路徑規劃與識別作為智能機器人研究的最重要因素,具有重要的理論意義和實用價值。但傳統的人工勢場法在路徑規劃中存在目標不可達和局部最小值點的缺點,影響機器人到達目標點。針對其存在的缺點,本文采用改進的人工勢場法進行路徑規劃,重新構建引力和斥力函數,引入運動因子,對結果進行仿真使機器人順利跳出局部最小值點,且路徑規劃相對更短,有效的解決了復雜環境下機器人的避障不足,驗證結果顯示所提方法能夠符合路徑規劃的要求。
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%
下載地址
基于改進人工勢場法的路徑規劃下載
相關電子資料下載
- 自主機器人近距離操作運動路徑規劃算法 392
- AGV在立體倉庫中的路徑規劃 407
- 全局路徑規劃RRT算法原理 687
- CBS多機器人路徑規劃實例講解 403
- 基于過Python+matplotlib數據可視化路徑規劃算法實現 884
- 機器人技術中常用的路徑規劃算法的開源庫 614
- 機器人基于搜索和基于采樣的路徑規劃算法 248
- 自動駕駛系統功能自車運動與路徑規劃介紹 495
- 全文詳解A*算法及其變種 1166
- 路徑規劃算法實現原理 570