基于Apriltags識(shí)別的改進(jìn)算法
大小:1.30 MB 人氣: 2017-11-05 需要積分:0
推薦 + 挑錯(cuò) + 收藏(0) + 用戶評(píng)論(0)
標(biāo)簽:Apriltags(2343)
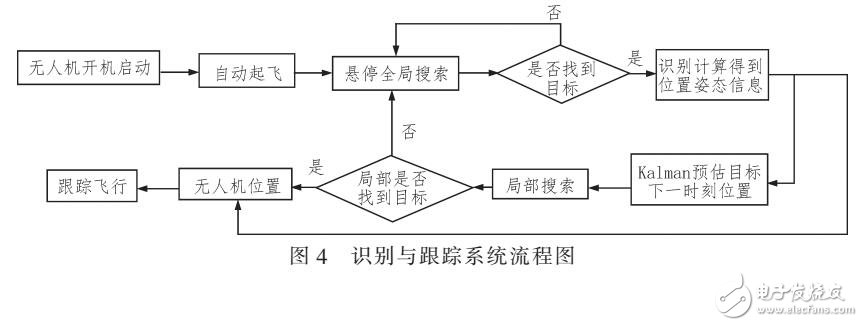
移動(dòng)目標(biāo)識(shí)別與跟蹤,在視頻監(jiān)控、人機(jī)交互、智能交通、軍事應(yīng)用等領(lǐng)域具有重大應(yīng)用價(jià)值。本文針對(duì)當(dāng)前目標(biāo)識(shí)別與跟蹤領(lǐng)域普遍存在的處理速度較慢、實(shí)時(shí)性不足等問(wèn)題,提出了一種基于Apriltags識(shí)別的改進(jìn)算法,對(duì)移動(dòng)目標(biāo)進(jìn)行局部搜索,并結(jié)合Kalman濾波器實(shí)時(shí)估計(jì)目標(biāo)下一時(shí)刻在圖像中的位置,大幅提升了算法處理速度和跟蹤性能。本算法在大疆M100四旋翼無(wú)人機(jī)平臺(tái)上,搭載Manifold機(jī)載計(jì)算機(jī)完成了實(shí)驗(yàn)測(cè)試。實(shí)驗(yàn)證明,算法魯棒性強(qiáng)、穩(wěn)定性好,成功實(shí)現(xiàn)了無(wú)人機(jī)對(duì)快速移動(dòng)目標(biāo)的識(shí)別與穩(wěn)定跟蹤。
非常好我支持^.^
(1) 100%
不好我反對(duì)
(0) 0%