一種紅外設(shè)備遠(yuǎn)程報(bào)警系統(tǒng)的設(shè)計(jì) - 全文
引 言
??? 鐵路車(chē)輛紅外線(xiàn)軸溫探測(cè)技術(shù)是近二、三十年發(fā)展起來(lái)的一門(mén)新技術(shù),主要應(yīng)用在防止客貨列車(chē)燃切軸事故上,特別是20世紀(jì)90年代發(fā)展起來(lái)二代機(jī)軸溫探測(cè)技術(shù)是一門(mén)集工程控制、信息網(wǎng)絡(luò)及自動(dòng)化控制的新興技術(shù),它對(duì)防止客貨列車(chē)燃切軸事故,保證行車(chē)安全起到了重要的作用。
??? 紅外線(xiàn)軸溫探測(cè)二代機(jī)技術(shù)主要是將各個(gè)探測(cè)站采集到的軸溫?cái)?shù)據(jù)進(jìn)行熱軸判別和處理后,通過(guò)電務(wù)通道上傳至信息監(jiān)測(cè)中心和查詢(xún)終端,其中計(jì)算機(jī)完成的主要功能是對(duì)軸溫探測(cè)流水?dāng)?shù)據(jù)、熱軸流水?dāng)?shù)據(jù)的處理,但隨著紅外技術(shù)的不斷發(fā)展和紅外管理工作的進(jìn)一步規(guī)范,特別是隨著紅外線(xiàn)在保證鐵路行車(chē)安全的作用和地位的提高,如何及時(shí)快速處理紅外設(shè)備故障以及快速準(zhǔn)確判斷紅外設(shè)備故障,成為目前紅外工作的重要組成部分,僅僅通過(guò)對(duì)軸溫探測(cè)的流水?dāng)?shù)據(jù)進(jìn)行分析來(lái)判斷故障已經(jīng)遠(yuǎn)遠(yuǎn)不能滿(mǎn)足紅外管理運(yùn)用工作的需求,必須將相關(guān)的紅外設(shè)備故障通過(guò)故障報(bào)警系統(tǒng)自動(dòng)判別后通知相關(guān)人員進(jìn)行快速處理。
1 概述
??? 在鐵路安全運(yùn)輸工作中,紅外線(xiàn)探測(cè)設(shè)備的故障判別及處理在紅外管理占有非常重要的地位,長(zhǎng)期以來(lái),紅外故障判別和處理主要以人工分析方式為主,存在著紅外設(shè)備使用率降低等弊端。隨著紅外工作的進(jìn)一步規(guī)范和強(qiáng)化,實(shí)現(xiàn)紅外設(shè)備故障報(bào)警以及控制自動(dòng)化,從人控轉(zhuǎn)變?yōu)闄C(jī)控已成為紅外故障處理的必然趨勢(shì)。
??? 紅外線(xiàn)設(shè)備遠(yuǎn)程報(bào)警系統(tǒng),是利用現(xiàn)有的電話(huà)網(wǎng)紅外線(xiàn)設(shè)備復(fù)位,可實(shí)現(xiàn)對(duì)紅外線(xiàn)設(shè)備的無(wú)人檢測(cè)遠(yuǎn)程報(bào)警,遠(yuǎn)程控制紅外線(xiàn)設(shè)備,機(jī)房熱分機(jī)啟動(dòng)等,以保證紅外線(xiàn)設(shè)備的正常工作,該設(shè)備極大地提高了紅外線(xiàn)設(shè)備運(yùn)行的安全性、可靠性及設(shè)備故障的及時(shí)性,極大地提高了行車(chē)保安設(shè)備的安全性。
2 本系統(tǒng)主要完成功能
??? 紅外線(xiàn)遠(yuǎn)程智能遠(yuǎn)程報(bào)警系統(tǒng)是采用單片機(jī)控制實(shí)現(xiàn)遠(yuǎn)程報(bào)警,與圖像監(jiān)控等手段相結(jié)合,能夠準(zhǔn)確快速地實(shí)現(xiàn)遠(yuǎn)程故障報(bào)警,系統(tǒng)拓?fù)鋱D如圖1所示。本系統(tǒng)由兩部分組成:紅外線(xiàn)探測(cè)點(diǎn)和車(chē)輛段監(jiān)控系統(tǒng)。
?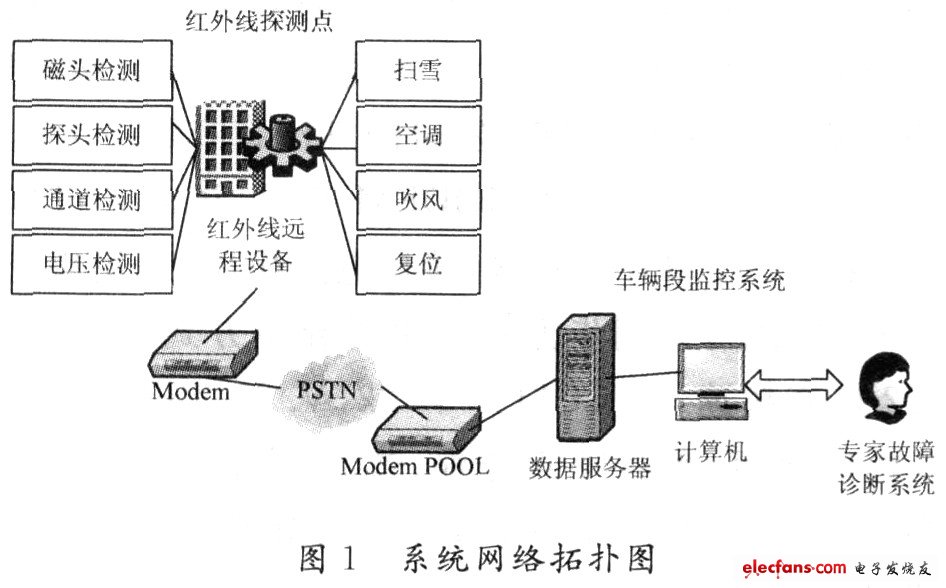
紅外線(xiàn)探測(cè)點(diǎn)由單片機(jī)及Modem撥號(hào),短距離無(wú)線(xiàn)通訊等部分組成,在系統(tǒng)滿(mǎn)足可靠性和通用性的前提下,紅外線(xiàn)探測(cè)點(diǎn)應(yīng)實(shí)現(xiàn)以下幾個(gè)方面的故障報(bào)警自動(dòng)化。
??? (1)對(duì)紅外設(shè)備的磁頭故障(包括磁頭損壞、丟失、磁頭磁性不穩(wěn)定等)進(jìn)行自動(dòng)遠(yuǎn)程報(bào)警。
??? (2)對(duì)主輔機(jī)的通訊故障(不接車(chē))進(jìn)行自動(dòng)報(bào)警,若為設(shè)備死機(jī)造成的故障,可進(jìn)行遠(yuǎn)程控制設(shè)備復(fù)位。
??? (3)對(duì)紅外中心通訊故障或停電故障進(jìn)行自動(dòng)遠(yuǎn)程報(bào)警。
??? (4)可對(duì)附加的其他設(shè)備的工作或關(guān)閉進(jìn)行遠(yuǎn)程控制(如電扇、空調(diào)、掃雪器等)。
??? (5)人員安全報(bào)警,當(dāng)檢修人員在探測(cè)點(diǎn)進(jìn)行檢測(cè)時(shí),對(duì)火車(chē)接近進(jìn)行報(bào)警,可保證檢測(cè)人員人身安全。
??? (6)對(duì)房屋內(nèi)人員的非法入侵進(jìn)行自動(dòng)遠(yuǎn)程報(bào)警。
??? (7)采用攝像拍攝的方法進(jìn)行監(jiān)控,具有動(dòng)態(tài)檢測(cè)進(jìn)行報(bào)警功能,可實(shí)現(xiàn)人員入侵動(dòng)態(tài)報(bào)警功能,考慮電話(huà)傳輸速度較慢,大量視頻圖像暫存于當(dāng)?shù)兀瑱z查人員使用U盤(pán)可將數(shù)據(jù)導(dǎo)出。
??? 車(chē)輛段監(jiān)控系統(tǒng)由服務(wù)器、Modem Pool、監(jiān)控LED顯示等部分組成。
??? 主要完成對(duì)紅外線(xiàn)探測(cè)點(diǎn)故障信號(hào)監(jiān)控、紅外線(xiàn)故障信息導(dǎo)入鐵道部紅外線(xiàn)段級(jí)紅外線(xiàn)信息平臺(tái),存儲(chǔ)、打印、顯示等功能。
3 主要實(shí)現(xiàn)方案
??? 紅外線(xiàn)設(shè)備遠(yuǎn)程報(bào)警系統(tǒng)能實(shí)時(shí)監(jiān)測(cè)紅外線(xiàn)設(shè)備的工作狀況,并通過(guò)安裝在紅外線(xiàn)設(shè)備機(jī)房的電話(huà)線(xiàn)把其數(shù)據(jù)傳送到車(chē)輛段中心電腦上,也可在任何有電話(huà)的地方用一臺(tái)電腦接收這些數(shù)據(jù),系統(tǒng)獨(dú)立工作,不影響紅外線(xiàn)設(shè)備工作,即使系統(tǒng)不工作(故障)也不會(huì)影紅外線(xiàn)設(shè)備工作。
3.1 主控制模塊
??? 主控制模塊由信道檢測(cè)、靜態(tài)卡、傳感器、液晶及電源組成,主要實(shí)現(xiàn)功能:
??? (1)實(shí)時(shí)接收各種模塊的數(shù)據(jù);
??? (2)能通過(guò)64×128液晶點(diǎn)陣顯示各模塊狀態(tài)和數(shù)據(jù),保存維修人員編碼;
??? (3)與上級(jí)通過(guò)MODEM交換數(shù)據(jù);
??? (4)偵聽(tīng)主、輔機(jī)之間的大列波形。
??? 存貯和顯示數(shù)據(jù),主要包括最近14列車(chē)的大列波形;一日的信道狀態(tài);三日的供電狀態(tài),異常復(fù)位;一日探頭供電箱,及輔機(jī)的各種電壓值;近5日環(huán)溫、箱溫情況;近30日防盜、維修人員訪問(wèn)情況;近30日探頭位置;最近14列車(chē)的1#、2#、3#磁頭的平均值、最大值、最小值和噪聲;探頭定標(biāo)值;近4日停電情況。系統(tǒng)構(gòu)成如圖2所示。
?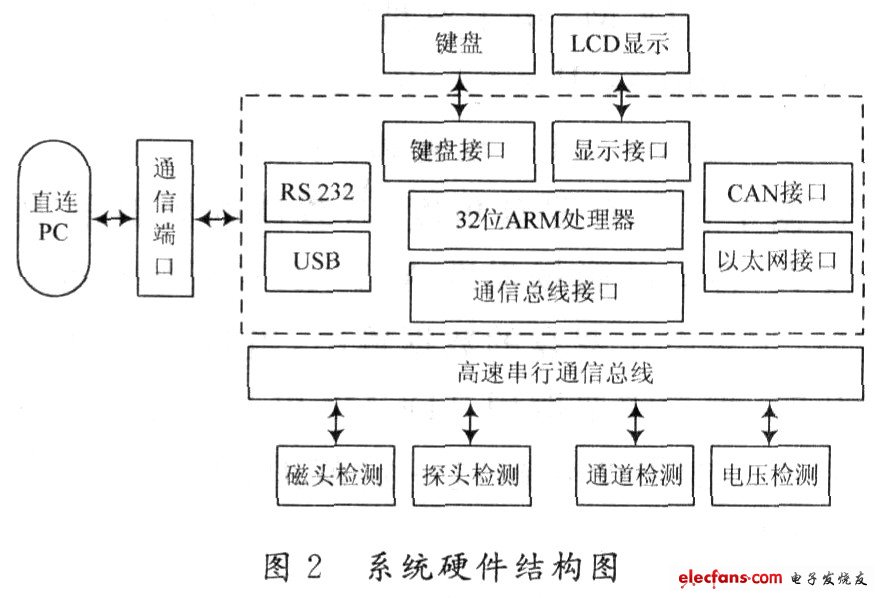
?系統(tǒng)采用嵌入式控制器32位ARM結(jié)構(gòu)微處理器,外圍擴(kuò)展存儲(chǔ)器接口,液晶顯示、鍵盤(pán)作為人機(jī)交互接口,通過(guò)RS 232和USB與PC機(jī)進(jìn)行通訊,嵌入式控制器可支持工業(yè)現(xiàn)場(chǎng)總線(xiàn)、以太網(wǎng)兩種網(wǎng)絡(luò)結(jié)構(gòu)。嵌入式控制器采用基于μC/OSⅡ內(nèi)核的RTOS操作系統(tǒng)。
3.2 探頭檢測(cè)模塊
??? 這部分模塊主要目標(biāo)是檢測(cè)探頭大列波形;定標(biāo)值以及探頭位置;檢測(cè)探頭供電箱,及輔機(jī)的各種電壓;檢測(cè)磁頭狀態(tài);檢測(cè)供電、上電、掉電、異常復(fù)位;檢測(cè)探測(cè)站與中心的信道狀態(tài)及環(huán)溫、箱溫等情況。采集二路下探波形,64點(diǎn)采樣,采集密度一樣,采集長(zhǎng)度增加一倍,即提前半個(gè)軸箱開(kāi)始,延后半個(gè)軸箱結(jié)束;通過(guò)RS 485口上傳主機(jī)探頭位置,對(duì)于檢測(cè)紅外線(xiàn)設(shè)備軸溫是否正常具有決定性意義,由于軸溫探測(cè)設(shè)備安裝在鐵軌旁邊,由于震動(dòng)等原因,經(jīng)常發(fā)生偏轉(zhuǎn),導(dǎo)致紅外線(xiàn)設(shè)備檢測(cè)波形不正確,探測(cè)軸溫出現(xiàn)偏差,傳統(tǒng)檢測(cè)方法是采用三角尺測(cè)量,用香頭在三角尺上放置熱源,對(duì)比紅外線(xiàn)探頭波形校準(zhǔn),這種方法測(cè)量復(fù)雜,精確度較低。
??? 采用電子羅盤(pán)可較好地解決這個(gè)問(wèn)題,電子羅盤(pán)是測(cè)量方位角(航向角)比較經(jīng)濟(jì)的一種儀器,本系統(tǒng)采用TDCM3電子羅盤(pán)傳感器模塊,TDCM3電子羅盤(pán)由美國(guó)Precision Navigation生產(chǎn)。模塊封裝了一個(gè)三軸磁強(qiáng)計(jì)和一個(gè)高性能的兩軸傾斜計(jì),可以同時(shí)輸出俯仰和滾動(dòng)角,以及三維的磁場(chǎng)測(cè)量值。以前所有的羅盤(pán)都必須保持水平才能保證精度,因而只能采用一種笨拙的萬(wàn)向節(jié),或再加上液體的方法來(lái)保持傳感器的水平狀態(tài)。TDCM3則使用了一個(gè)高性能的傾斜計(jì)(傾斜傳感器),允許微處理器在數(shù)學(xué)上改正傾斜角,因此,它是一種消除了機(jī)械常平架的電子羅盤(pán)。TDCM3電子羅盤(pán)對(duì)水平方向的角度測(cè)量為360°,同時(shí),按照可測(cè)量?jī)A斜角度范圍,又分為20°,50°,80°。電子羅盤(pán)的數(shù)據(jù)輸出可以是RS 232或RS 485標(biāo)準(zhǔn)的數(shù)據(jù)字符輸出或者模擬輸出,并且可以由主控計(jì)算機(jī)發(fā)出控制指令,來(lái)控制TD—CM3電子羅盤(pán)輸出數(shù)據(jù)的種類(lèi)、格式以及工作方式。
??? 完整的TDCM3電子羅盤(pán)的數(shù)據(jù)輸出為:
??? $C
??? 數(shù)據(jù)中包含有羅盤(pán)角度C,載體的傾斜角P和橫滾角度R,各向的磁場(chǎng)強(qiáng)度X,Y,Z,在開(kāi)始校準(zhǔn)好探頭位置后,記錄電子羅盤(pán)的數(shù)據(jù)輸出,當(dāng)俯仰角、方位角發(fā)生變化時(shí),根據(jù)需要取用TDCM3電子羅盤(pán)提供的數(shù)據(jù)進(jìn)行對(duì)比。如果變化超過(guò)一定范圍,表明探頭發(fā)生偏轉(zhuǎn),需要再次校準(zhǔn)。
3.3 磁頭波形電壓檢測(cè)模塊
??? 這部分模塊主要目標(biāo)是采集3路磁頭波形,在觸發(fā)處的位置需要保存,采集結(jié)果通過(guò)RS 485口與主機(jī)通訊。電壓檢測(cè)模塊檢測(cè)27路模擬電壓;220V,交流值;異常復(fù)位。采集電壓原理圖如圖3所示。
?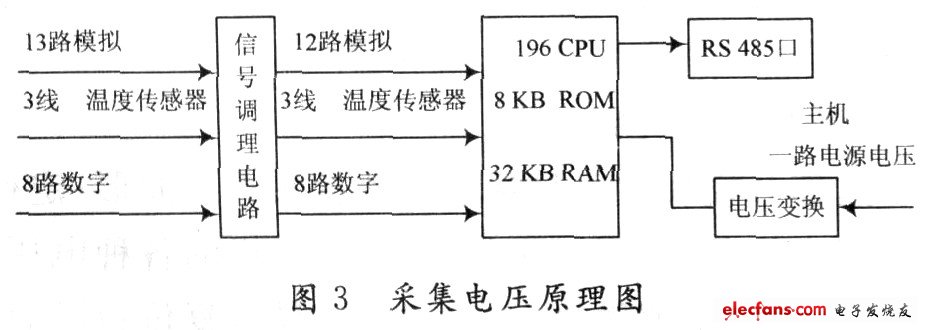
?檢測(cè)內(nèi)容如下:
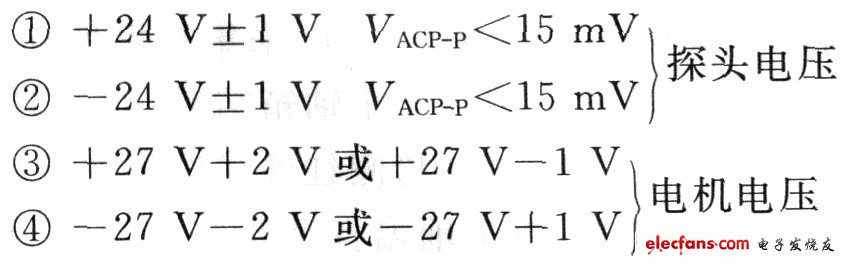
??? ⑤2x背溫輸出:3.33—2.33 V
??? ⑥2x保護(hù)門(mén)電壓:±27 V
??? ⑦2x探頭噪聲和峰值(在自檢時(shí)采集):Vp-p<25 mV
3.4 數(shù)據(jù)傳輸模塊
??? 系統(tǒng)在紅外線(xiàn)探測(cè)點(diǎn)將數(shù)據(jù)通過(guò)MODEM發(fā)送至車(chē)輛段監(jiān)控中心,中心計(jì)算機(jī)對(duì)數(shù)據(jù)可實(shí)時(shí)監(jiān)控,根據(jù)紅外線(xiàn)設(shè)備檢修方法,可對(duì)紅外線(xiàn)設(shè)備進(jìn)行遠(yuǎn)端維護(hù)。數(shù)據(jù)傳送主要采用TDK公司的TDK73M2901CL,它是一種高集成度的單片MODEM芯片,該芯片可以和8048或80C51單片機(jī)對(duì)接,接口電路簡(jiǎn)單;采用串行口數(shù)據(jù)傳輸;既可以同步方式又可以異步方式工作,包括V.22擴(kuò)充超速;與CCITT V.22,V.21,BELL 212A,103標(biāo)準(zhǔn)兼容;具有呼叫進(jìn)程、載波、應(yīng)答音、長(zhǎng)回環(huán)檢測(cè)的功能。TDK73M2901CL具有32DIP封裝,其引腳見(jiàn)圖4。
?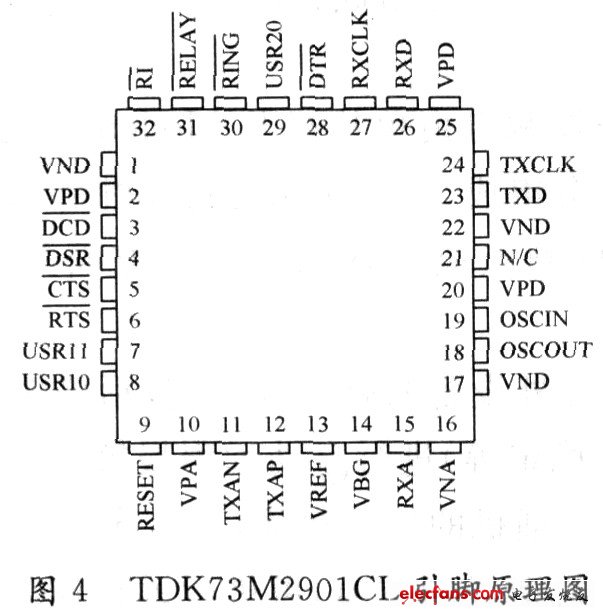
TDK73M2901CL內(nèi)部有4個(gè)寄存器可用于控制和狀態(tài)的監(jiān)視。其中,控制寄存器CR0用于控制電話(huà)線(xiàn)路上數(shù)據(jù)傳輸?shù)姆绞剑豢刂萍拇嫫鰿Rl用于控制TDK73M2901CL內(nèi)部狀態(tài)與單片機(jī)之間的接口;檢測(cè)寄存器DR是一個(gè)只讀寄存器,它提供了監(jiān)視MODEM工作狀態(tài)的條件;音調(diào)寄存器TR則用于控制音頻信號(hào)的產(chǎn)生,在TR的控制下,MODEM可以產(chǎn)生DTMF信號(hào)、應(yīng)答音信號(hào)和防衛(wèi)音信號(hào),還可以在MODEM啟動(dòng)和與對(duì)方聯(lián)系過(guò)程中對(duì)RXD引腳進(jìn)行控制。
??? 寄存器名稱(chēng)、地址、數(shù)據(jù)位如下:AD2~ADO D7D6 D5 D4 D3 D2 D1 D0,控制寄存器CR0地址000,調(diào)制選擇:O發(fā)送模式,其中:1100=FSK模式,包括發(fā)送允許、應(yīng)答、始發(fā)模式;控制寄存器CRl地址001,數(shù)據(jù)發(fā)送方式:允許中斷,包括旁路編碼、時(shí)鐘控制、復(fù)位操作、測(cè)試模式,其中:00=正常;檢測(cè)寄存器DR地址010,包括接收數(shù)據(jù)、介碼標(biāo)志、載波檢測(cè)、應(yīng)答音、呼叫過(guò)程、長(zhǎng)環(huán)檢測(cè)等模式;若條件檢測(cè)到為“1”,否則為“0”;音調(diào)控制寄存器TR,地址011,控制RDX包括發(fā)防衛(wèi)音、發(fā)應(yīng)答音、發(fā)送DTMF音模式,該四位對(duì)應(yīng)1~16 DTMF信號(hào)。
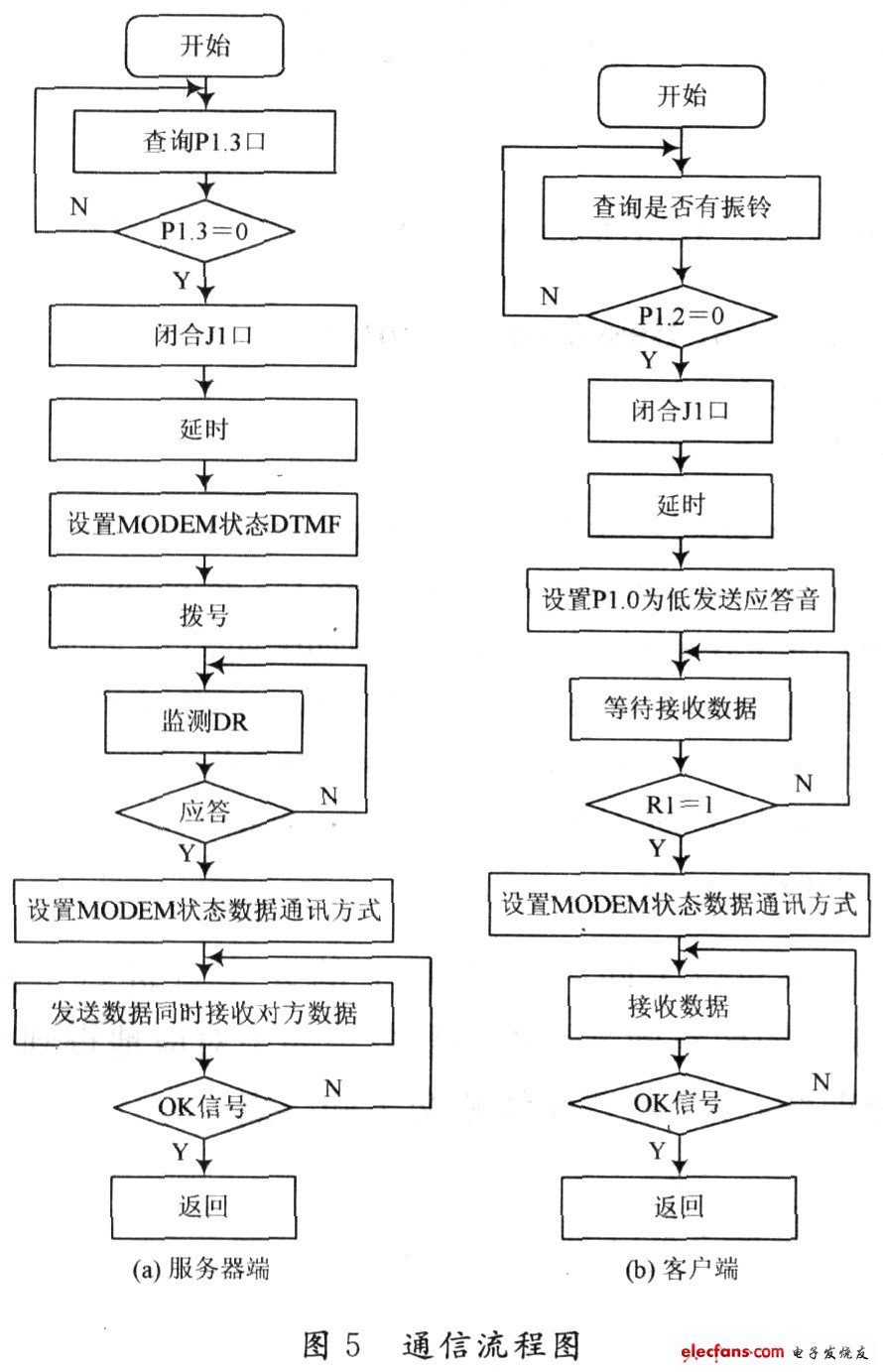
??? 接收端的MODEM按應(yīng)答方式接線(xiàn),單片機(jī)89C51平時(shí)處于巡回檢測(cè)電話(huà)振鈴信號(hào)的狀態(tài),一旦檢測(cè)到該信號(hào),則可將J2吸合,在2 s左右的沉默之后,啟動(dòng)MODEM發(fā)送應(yīng)答音。雙方經(jīng)過(guò)簡(jiǎn)短的握手過(guò)程之后,89C51便將收到的對(duì)方代碼存儲(chǔ)至數(shù)據(jù)服務(wù)器。在發(fā)送完DTMF(撥號(hào)信號(hào))之后,程序需要檢測(cè)應(yīng)答音、發(fā)送和接收握手信號(hào)、循環(huán)發(fā)送本機(jī)代碼等內(nèi)容。雙方所用的通信程序框圖見(jiàn)圖5。
?
4 實(shí)驗(yàn)及測(cè)試結(jié)果
??? 系統(tǒng)設(shè)計(jì)完成后,可脫機(jī)值守方式工作,122×32點(diǎn)陣LCD可實(shí)時(shí)顯示時(shí)鐘、操作狀態(tài),并具有15鍵操作鍵盤(pán),可獨(dú)立完成故障檢測(cè)及查詢(xún)等功能(外形尺寸:255 mm(高)×176 mm(寬)×100 mm(厚)),提供RS 232/RS 485,RJ45接口,支持局域網(wǎng)連接;提供識(shí)別記錄的標(biāo)準(zhǔn)數(shù)據(jù)格式。
??? 主要技術(shù)參數(shù):
??? (1)通訊報(bào)警時(shí)間:5 min;
??? (2)1#,2#,3#磁頭報(bào)警時(shí)間:有過(guò)車(chē)時(shí),4 min;
??? (3)檢測(cè)車(chē)輛速度范圍:3~200 km/h;
??? (4)復(fù)位時(shí)間,3 s左右。
??? (5)1#,2#,熱分機(jī)接通時(shí)間大于2 min;
??? (6)預(yù)留控制接通時(shí)間,大于2 min。
??? 為驗(yàn)證系統(tǒng)性能,在測(cè)試點(diǎn)安裝紅外線(xiàn)設(shè)備遠(yuǎn)程報(bào)警系統(tǒng),經(jīng)過(guò)大量實(shí)驗(yàn),該系統(tǒng)共預(yù)報(bào)設(shè)備故障302起,其中停電276起,與中心通訊故障9起(通訊部門(mén)通道問(wèn)題8起,主機(jī)死機(jī)1起),不接車(chē)或漏接車(chē)故障4起,保護(hù)門(mén)故障10起(其中異物遮擋8起),2#,3#磁頭故障6起,主副機(jī)通信故障1起,預(yù)報(bào)準(zhǔn)確率達(dá)到100%,指揮中心的值班員和維修工的勞動(dòng)強(qiáng)度大大降低,預(yù)報(bào)故障準(zhǔn)確率提高。以往紅外指揮中心人員根據(jù)經(jīng)驗(yàn),由于沒(méi)有現(xiàn)場(chǎng)監(jiān)測(cè)信息,判斷故障準(zhǔn)確率低,維修工人得到故障通知后,分析判斷缺乏依據(jù),經(jīng)常發(fā)生所帶板件與故障點(diǎn)不符的情況,加上交通不便,故障處理起來(lái)就比較困難。使用紅外線(xiàn)遠(yuǎn)程監(jiān)控測(cè)試儀后,錯(cuò)報(bào)的故障幾乎沒(méi)有,使得維修工人可以根據(jù)準(zhǔn)確的故障預(yù)報(bào),及時(shí)攜帶相關(guān)板件處理故障,設(shè)備的停機(jī)時(shí)間大幅度減少。該系統(tǒng)為壓縮故障延時(shí)和及時(shí)處理故障提供了幫助,而且由于死機(jī)、雪堵、結(jié)冰等故障可以遠(yuǎn)程控制排除,幾乎不影響探測(cè)站設(shè)備正常工作。
- 第 1 頁(yè):一種紅外設(shè)備遠(yuǎn)程報(bào)警系統(tǒng)的設(shè)計(jì)
- 第 2 頁(yè):主要實(shí)現(xiàn)方案
- 第 3 頁(yè):數(shù)據(jù)傳輸模塊
本文導(dǎo)航
非常好我支持^.^
(5) 100%
不好我反對(duì)
(0) 0%
相關(guān)閱讀:
- [電子說(shuō)] 典型煤巖反射光譜特征 2023-10-24
- [電子說(shuō)] 微型紅外無(wú)線(xiàn)測(cè)溫系統(tǒng)的應(yīng)用及簡(jiǎn)介 2023-10-24
- [控制/MCU] Holtek新推出HT67F2452紅外線(xiàn)驅(qū)動(dòng)A/D與LCD型Flash MCU 2023-10-23
- [電子說(shuō)] 中科德芯:突破關(guān)鍵技術(shù)難題 全力搶占短波紅外探測(cè)器核心技術(shù)制高點(diǎn) 2023-10-23
- [電子說(shuō)] XKCON祥控明火煤安全監(jiān)控系統(tǒng) 2023-10-23
- [電子說(shuō)] 母線(xiàn)槽紅外測(cè)溫解決方案 2023-10-22
- [電子說(shuō)] 紅外成像導(dǎo)引頭對(duì)隱身飛機(jī)探測(cè)性能提升途徑分析 2023-10-22
- [電子說(shuō)] 拼接型短波紅外探測(cè)器的光譜響應(yīng)特性分析 2023-10-22
( 發(fā)表人:大本 )