橫擺角速度和側向加速度的綜合控制 - 主動前輪轉向控制技術研究
D*控制(或稱為橫擺角速度和側向加速度的綜合控制)源于四輪轉向控制中對后輪轉向的控制策略,是一種對車輛的橫擺角速度和側向加速度進行綜合控制的方法。在該控制中,控制的反饋量不再只有橫擺角速度,而是橫擺角速度與側向加速度的線性組合,如式(3)所示。
式中:Cy為側向加速度,VY為車速與橫擺角速度的乘積,兩者量綱一致,從這里可以看出,D*控制是一種側重于側向運動控制的控制方法。
D*控制框圖如圖6所示,其中D*由理想車輛模型推出的與車速有關的比例系數(shù)與駕駛員輸入的轉角求得。CFF(s)為前饋控制傳遞函數(shù),主要實現(xiàn)的是隨車速改善車輛響應增益,CFS(s)為反饋控制環(huán)節(jié),用來生成附加轉角。
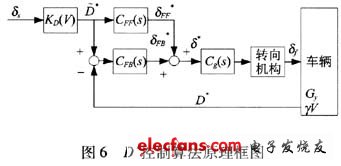
?
與橫擺角速度反饋控制相比,D*控制可以進一步提高車輛的轉向響應速度,在抑制擾動的同時,提高車輛軌跡跟蹤的能力,在側向運動要求比較高的工況下(如:低附著系數(shù)路面雙移線,側向陣風直線行駛)效果較好。
2.3 側傾穩(wěn)定性控制
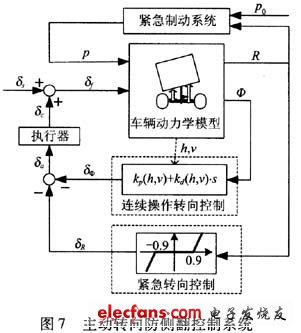
在車輛行駛過程中,高速過彎、緊急避讓和側向陣風的干擾都有可能直接導致車輛側翻,另外,重心偏高的車輛也特別容易發(fā)生側翻。還有,當駕駛員對車輛的側向穩(wěn)定性做出錯誤估計時,也會導致車輛側翻的發(fā)生。側向加速度是影響車輛側向穩(wěn)定性的主要因素,通過主動轉向可有效地影響車輛的側向加速度從而控制車輛的側傾。一般來說,車輛的防側翻控制采用一個指示車輛側傾狀態(tài)的闕值,當檢測到的側傾狀態(tài)超過闕值,則觸發(fā)防側翻控制。闕值可以是重心處的側向加速度、車輛側翻系數(shù)或者載荷轉移系數(shù)等。
圖7所示為基于主動轉向和制動集成控制的控制系統(tǒng)圖。圖中只為側翻系數(shù),是由車輛的輪寬和簧載質量重心處的側向加速度來求得。當,|R|<1時,意味著車輛側向穩(wěn)定,而當R=±1時,則意味著車輛左側或右側的車輪將抬離地面。該控制有兩種模式,當|R|<0.9時,車輛正常行駛,控制系統(tǒng)處于連續(xù)操縱轉向控制模式,附加轉角根據(jù)對側傾阻尼的優(yōu)化策略產生,可以有效減小轉向產生的側傾,抑制處于車輛側傾共振頻帶內的外界擾動。當,|R|≥0.9時,車輛處于側傾危險狀態(tài),控制系統(tǒng)進入緊急轉向控制模式,此時附加轉角δR=kR(|R|-0.9),可以有效增大車輛轉彎半徑,同時系統(tǒng)進行一定的緊急制動操作,進一步降低車速,從而避免車輛發(fā)生側翻。
?
在主動轉向防側翻的控制中,由于附加轉角的存在,會影響車輛按照駕駛員意圖行駛的能力,因此控制策略中應由一個關于汽車行駛時車道保持能力的控制方法,如采用主動制動的方法。由于車輛側翻的危害性比較大,因此這類控制一般都遵循了側翻控制優(yōu)先于車道跟隨的原則。
2.4 可變轉向傳動比的控制
操縱穩(wěn)定性實際上是一個人車路閉環(huán)系統(tǒng)的特性,操縱穩(wěn)定性的好壞最終決定于駕駛員感受,因而在主動前輪轉向的控制中,如何提高駕駛員操縱的安全性和舒適性也成為提高系統(tǒng)操縱穩(wěn)定性的一個重要因素。在傳統(tǒng)汽車上,從方向盤到車輪的傳動比是一個定值。在低速時,車輛如在泊車停靠等工況下,或者由于障礙物而突然變道時,需要駕駛員大幅、快速操縱方向盤,增加了駕駛員的身體負擔。相反,在高速時,由于車輛轉向響應增益加大,較小的方向盤轉角就會產生較大的側向加速度,增加了駕駛員的精神負擔。可變轉向傳動比可有效地解決上述問題。一般來說,變轉向傳動比控制中轉向傳動比的變化主要取決于兩方面的因素:車速和方向盤轉角。隨著車速的升高,轉向傳動比增加,隨著方向盤轉角的增大,轉向傳動比減小,如圖8所示。這樣,可以使得駕駛員在低速時轉向輕便而高速時操縱穩(wěn)定。在目前的主動前輪轉向控制中,許多控制算法都把可變轉向傳動比控制作為一個前饋環(huán)節(jié),同反饋環(huán)節(jié)一起改善車輛的操縱穩(wěn)定性。在機械式主動轉向系統(tǒng)中,可變傳動比是通過轉角疊加的方式實現(xiàn)的,其輸入、輸出關系如下:

?
式中:Wsw為方向盤輸入轉角,Wring為主動齒輪輸入轉角,α1、α2為兩者疊加的比例系數(shù)。
3 主動前輪轉向動力學控制展望
由于車輛橫擺角速度和側向加速度通過輪胎的側向力耦合,利用主動轉向通過側向力來改善車輛的操縱穩(wěn)定性必然面臨無法解決的矛盾,即側向加速度與橫擺角速度無法同時達到比較理想的優(yōu)化狀態(tài)。如何理解這一矛盾的性質以及如何實現(xiàn)車輛側向運動和橫擺運動的綜合改善從而進一步提高車輛的操縱穩(wěn)定性,將是需要我們深人思考和研究的問題。
由于輪胎本身存在側向力飽和的情況,因此主動轉向極限工況下作用非常有限。車輛的操縱穩(wěn)定性不僅可以通過轉向來影響,而且可以通過縱向運動(驅動、制動)的控制產生的直接橫擺力矩來影響,同時,它還與車輛的懸架系統(tǒng)特性有著密切的關系。因此,主動前輪轉向系統(tǒng)與各系統(tǒng)間的集成控制就成為未來的必然選擇。通過集成控制,可以將各系統(tǒng)對操縱穩(wěn)定性影響的優(yōu)勢充分發(fā)揮出來,最大限度地提高車輛在極限工況下的穩(wěn)定性。目前,已經(jīng)出現(xiàn)了一些主動前輪轉向與其他系統(tǒng)的集成控制方案,比較多見的是主動前輪轉向與直接橫擺力矩控制的集成,以及主動前輪轉向與主動懸架的集成等。
圖9所示為主動前輪轉向與直接橫擺力矩控制的集成控制系統(tǒng)的控制算法框圖。該控制系統(tǒng)可以提高車輛穩(wěn)定性,拓寬極限行駛區(qū)域,減小轉向幅度,更少產生由于制動干預引起的急劇減速,從而使車輛行駛安全性、舒適性得到大大提高。
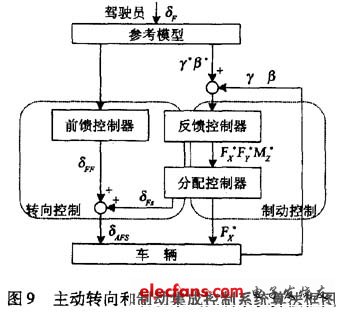
?
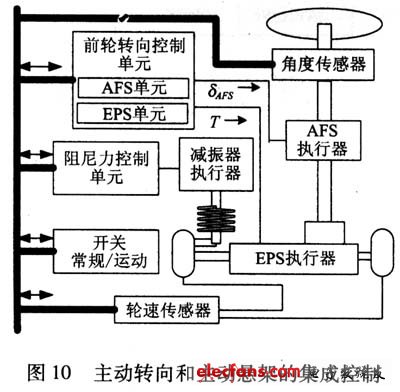
圖10所示為豐田公司提出的一種主動轉向和主動懸架集成控制結構。系統(tǒng)由前輪轉向控制單元和阻尼力控制單元組成。分為正常模式和運動模式,通過一個開關來進行選擇。在運動模式中,轉向傳動比更小,減振器的阻尼力大于正常模式。在兩種模式下,轉向力的感覺是相同的。
- 第 1 頁:主動前輪轉向控制技術研究
- 第 2 頁:線控轉向系統(tǒng)
- 第 3 頁:橫擺角速度和側向加速度的綜合控制
本文導航
非常好我支持^.^
(16) 100%
不好我反對
(0) 0%
相關閱讀:
- [電子說] XC9290/XC9291系列降壓DC/DC轉換器簡介 2023-10-19
- [機器人] 深度解析機器人控制技術背后的機械原理 2023-10-17
- [電子說] 控制技術是推動現(xiàn)代電機發(fā)展的重要動力 ——畢超博士出席浙江電機協(xié)會第9次 2023-10-10
- [電子說] OLED透明屏控制:引領未來交互技術的創(chuàng)新突破 2023-10-07
- [電子說] 變頻空調和定頻空調的區(qū)別 2023-09-15
- [電子說] 電氣控制技術及低壓電器元件概述 2023-09-08
- [電子說] 新一代電機控制技術的研發(fā) 2022-10-05
- [電子說] 信號隔離器智能化發(fā)明專利:一種模擬信號隔離傳輸及智能控制技術 2022-09-01
( 發(fā)表人:葉子 )