Microelectronics的電機(jī)驅(qū)動(dòng)器
步進(jìn)電機(jī)和永磁同步電機(jī)越來越多地服務(wù)于需要高效率和出色性能的控制應(yīng)用。當(dāng)前的電機(jī)控制技術(shù)包括使用微電子技術(shù)來改進(jìn)對(duì)速度、位置和扭矩的控制,以及更高的效率。
步進(jìn)電機(jī)是能夠?qū)㈦娒}沖轉(zhuǎn)換為離散機(jī)械步進(jìn)的機(jī)電設(shè)備。當(dāng)適當(dāng)?shù)碾娒}沖序列(隨時(shí)間在強(qiáng)度和方向上都受到控制)施加到電機(jī)上時(shí),曲軸會(huì)以離散的步數(shù)旋轉(zhuǎn)。步進(jìn)電機(jī)是需要精確控制運(yùn)動(dòng)范圍的應(yīng)用的理想解決方案。它們可以控制旋轉(zhuǎn)角度、速度、位置和同步。步進(jìn)電機(jī)的主要優(yōu)點(diǎn)是它們不需要反饋機(jī)制;無需使用編碼器即可精確確定位移量。
永磁同步電機(jī) (PMSM) 允許非常快速和精確的扭矩和速度控制,即使在運(yùn)行瞬態(tài)期間也能確保最佳效率。它們的卓越性能是由于它們?cè)谡麄€(gè)速度范圍內(nèi)非常有規(guī)律的旋轉(zhuǎn)、零速時(shí)的全扭矩控制以及高加速度和減速度值。PMSM 的應(yīng)用眾多,包括電器(洗衣機(jī)、洗碗機(jī)泵、冰箱和空調(diào))、醫(yī)療設(shè)備(CPAP 和 VPAP 機(jī)器、泵、輪椅)、電動(dòng)汽車、自動(dòng)售貨機(jī)、自動(dòng)取款機(jī)、工業(yè)執(zhí)行器、風(fēng)扇、泵, 和鼓風(fēng)機(jī)。
單極和雙極步進(jìn)電機(jī)
單極步進(jìn)電機(jī)由兩個(gè)相同的線圈組成,兩個(gè)線圈都帶有未電氣連接的中間抽頭。通過為雙線線圈對(duì)的一端供電,使流動(dòng)反向,中間抽頭用作公共極。單極步進(jìn)電機(jī)的優(yōu)勢(shì)在于每相使用帶有中間抽頭的繞組。繞組的每一側(cè)都針對(duì)磁通量的每個(gè)方向被激活。開關(guān)電路非常簡單,因?yàn)樵撈骷哂锌梢栽诓桓淖?a href="http://www.asorrir.com/tags/電流/" target="_blank">電流方向的情況下反轉(zhuǎn)的磁極。然而,由于每個(gè)線圈只有一半被磁化,因此單極步進(jìn)電機(jī)的磁力減小,因此可用扭矩值受到限制。
雙極步進(jìn)電機(jī)類似于單極步進(jìn)電機(jī),但它們的線圈沒有中間抽頭。雙極電機(jī)的驅(qū)動(dòng)稍微復(fù)雜一些,通常基于能夠反轉(zhuǎn)繞組極性并因此反轉(zhuǎn)磁通量的 H 橋。由于雙極電機(jī)每個(gè)繞組僅使用一個(gè)較大的線圈,因此繞組電阻較低,可以獲得較高的扭矩值。
由于驅(qū)動(dòng)電路的簡單性,單極步進(jìn)電機(jī)仍然在多種應(yīng)用中使用,只需要幾個(gè)分立元件。然而,隨著在減小電子元件的尺寸和成本方面取得的進(jìn)展,最近的步進(jìn)應(yīng)用傾向于使用雙極步進(jìn)電機(jī)。
驅(qū)動(dòng)雙極步進(jìn)
電機(jī) 驅(qū)動(dòng)步進(jìn)電機(jī)的兩種最常見模式是全步和半步。在全步模式下,兩相始終同時(shí)激活,電機(jī)始終提供額定扭矩。這種控制模式只需要四個(gè)方波信號(hào),可由微控制器 PWM 模塊產(chǎn)生。占空比保持固定,持續(xù)時(shí)間等于一個(gè)步驟。根據(jù)初始階段,軸將順時(shí)針或逆時(shí)針旋轉(zhuǎn)。
半步模式稍微復(fù)雜一些。在這種情況下,根據(jù)特定時(shí)間僅激活一相或兩相,并且電機(jī)在每個(gè)時(shí)鐘脈沖處前進(jìn)半步。這種模式可以獲得更高的位置值分辨率并消除不穩(wěn)定性。然而,由于扭矩不會(huì)隨時(shí)間保持恒定,因此半步解決方案會(huì)產(chǎn)生共振和振動(dòng)現(xiàn)象。
驅(qū)動(dòng)步進(jìn)電機(jī)的另一種方式是波驅(qū)動(dòng)模式,其中在任何給定時(shí)刻只有一個(gè)相位處于活動(dòng)狀態(tài)。設(shè)計(jì)人員很少選擇這種模式,因?yàn)樗实停⑶蚁鄬?duì)于其他方法產(chǎn)生的扭矩值較低。
最后,還有第四種模式,微步進(jìn),它可以提供非常高分辨率的值,并通過恒流調(diào)節(jié)防止扭矩振蕩。微步進(jìn)驅(qū)動(dòng)器通過遵循正弦曲線曲線來增加或減少驅(qū)動(dòng)電流,因此在任何時(shí)候都不會(huì)完全關(guān)閉或打開極點(diǎn)。
所有的驅(qū)動(dòng)模式都可以使用標(biāo)準(zhǔn)的邏輯電路來獲取信號(hào),但最常用的解決方案是基于專為步進(jìn)電機(jī)控制而設(shè)計(jì)的集成電路。
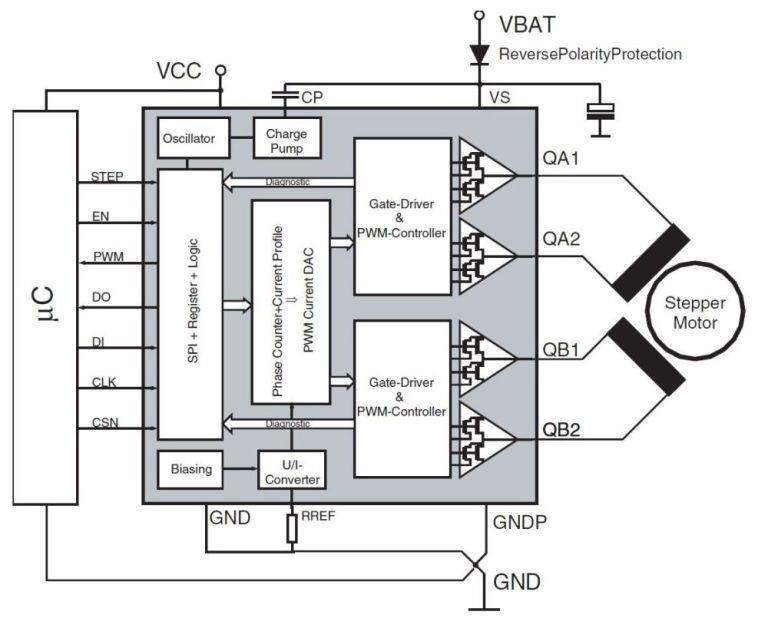
圖 1:L9942 框圖(圖片:意法半導(dǎo)體)
當(dāng)今市場上有多種 IC 可以驅(qū)動(dòng)雙極步進(jìn)電機(jī)并實(shí)現(xiàn)微步進(jìn)等高級(jí)功能。例如,STMicroelectronics 的 L9942 是一款用于雙極步進(jìn)電機(jī)的集成驅(qū)動(dòng)器,具有微步進(jìn)和可編程電流曲線查找表 (LUT)。該器件包括兩個(gè)全橋,最大負(fù)載為 1.3 A(R DS(on) = 500 mΩ),并且可以編程為全、半或微步進(jìn)模式操作(圖 1)。該器件可以通過 SPI 接口和一些離散邏輯信號(hào)輕松地與微控制器連接。L9942 包含邏輯塊,旨在檢測由過度機(jī)械負(fù)載引起的電機(jī)失速,在這種情況下,負(fù)載電流的上升速度比正常操作期間快得多。
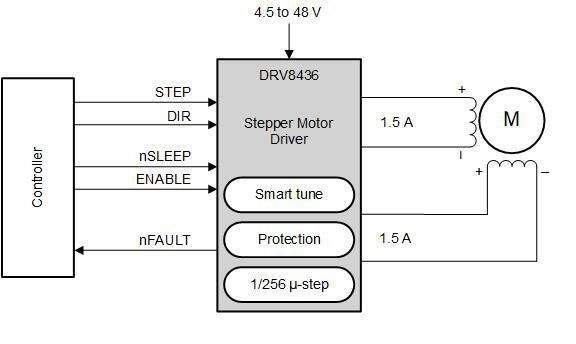
圖 2:DRV8436/DRV8437 框圖(圖片:德州儀器)
Texas Instruments 的 DRV8436 和 DRV8437 具有兩個(gè) N 通道功率 MOSFET H 橋驅(qū)動(dòng)器、一個(gè)微步分度器和集成電流感應(yīng)(圖 2)。DRV8436/37 可以分別驅(qū)動(dòng)高達(dá) 1.1 A 和 0.8 A 的輸出。該驅(qū)動(dòng)器的內(nèi)部電流檢測架構(gòu)無需兩個(gè)外部功率檢測電阻器,從而節(jié)省了 PCB 面積和系統(tǒng)成本。智能調(diào)諧衰減技術(shù)可自動(dòng)調(diào)整以獲得最佳電流調(diào)節(jié)性能,并補(bǔ)償電機(jī)變化和老化效應(yīng)。一個(gè)簡單的 STEP/DIR 接口允許外部控制器管理步進(jìn)電機(jī)的方向和步進(jìn)速率。為電源欠壓、電荷泵故障、過流、短路、開路負(fù)載和過熱提供保護(hù)功能。
PMSM 控制技術(shù)
為了實(shí)現(xiàn)高效率,稱為磁場定向控制 (FOC) 的特殊矢量算法應(yīng)用于永磁同步電機(jī)的控制。該算法將定子電流分解為用于產(chǎn)生磁場的部分和用于產(chǎn)生轉(zhuǎn)矩的部分。這種方法的優(yōu)點(diǎn)是,在分解之后,兩個(gè)組件都可以單獨(dú)控制。
在 PMSM 中,扭矩由兩個(gè)磁場共同作用產(chǎn)生:一個(gè)用于定子,另一個(gè)用于轉(zhuǎn)子。磁通量決定了作用在定子上的磁場,因此由施加到定子的電流產(chǎn)生。轉(zhuǎn)子上的磁場由永磁體產(chǎn)生的磁通量表示,因此可以認(rèn)為是恒定的。當(dāng)兩個(gè)磁場相互垂直時(shí),由這兩個(gè)磁場(對(duì)扭矩負(fù)責(zé))的聯(lián)合作用產(chǎn)生的力最大。因此,目標(biāo)是適當(dāng)控制定子電流,使其產(chǎn)生垂直于轉(zhuǎn)子磁體的矢量。
在電機(jī)軸旋轉(zhuǎn)期間,施加在定子上的電流必須不斷更新,以使與定子磁通相關(guān)的矢量與與轉(zhuǎn)子磁體流動(dòng)相關(guān)的矢量之間的角度始終等于 90°。該問題的經(jīng)典解決方案使用基于微控制器的算法,該算法連續(xù)調(diào)整定子電流的相位和幅度。
相位控制需要了解轉(zhuǎn)子位置,通常通過絕對(duì)位置傳感器(旋轉(zhuǎn)變壓器)或相對(duì)位置傳感器(編碼器)獲得。在某些應(yīng)用中,基于霍爾效應(yīng)的磁性位置傳感器被用作替代方案。幅度控制是使用比例積分 (PI) 控制器實(shí)現(xiàn)的,該控制器作用于相電流、位置和電機(jī)速度等變量。
無傳感器 PMSM 控制
高效的 PMSM 控制需要準(zhǔn)確的轉(zhuǎn)子位置信息,但在某些應(yīng)用中,使用外部傳感器可能會(huì)對(duì)整個(gè)系統(tǒng)的可靠性和效率產(chǎn)生負(fù)面影響。在這種情況下,使用間接或估計(jì)的位置檢測技術(shù)代替機(jī)械傳感器(提供曲軸位置的直接測量)。用于估計(jì)轉(zhuǎn)子位置的方法因使用的電機(jī)類型而異。對(duì)于低轉(zhuǎn)速,頻率注入和開環(huán)啟動(dòng)等機(jī)制很常見。對(duì)于中速和高速,反電動(dòng)勢(shì) (BEMF) 觀測器技術(shù)通常用于檢測電機(jī)繞組中感應(yīng)的 BEMF 的過零點(diǎn)。
PMSM 控制解決方案
STMicroelectronics 提供全系列組件和評(píng)估板,以優(yōu)化無刷直流 PMSM 電機(jī)控制系統(tǒng)。這些器件具有高效率、低噪音和延長壽命的特點(diǎn),據(jù)說能夠以低成本快速上市。例如,EVAL6393FB 參考設(shè)計(jì)演示了如何使用兩個(gè) L6393 驅(qū)動(dòng)器通過全橋拓?fù)潋?qū)動(dòng)單相負(fù)載(圖 3)。該板具有優(yōu)化的布局,可以通過施加總線電壓和方向信號(hào)來運(yùn)行。該驅(qū)動(dòng)器可提供 150 W(3.0 Arms 時(shí)為 50 V)的輸出功率,占用空間更小,并通過外部邏輯信號(hào)實(shí)現(xiàn)具有過流保護(hù)的 PWM 電壓模式控制。
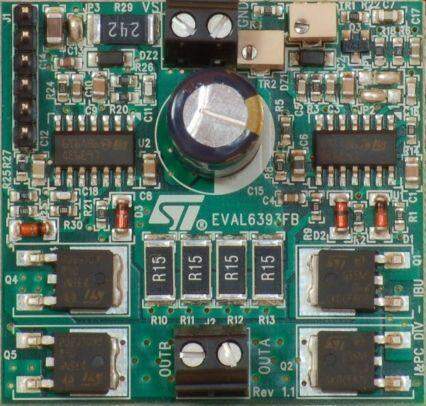
圖 3:EVAL6393FB 低壓全橋參考設(shè)計(jì)板
(圖片:意法半導(dǎo)體)
英飛凌科技的 XMC1000 電機(jī)控制應(yīng)用套件提供了一個(gè)完整的硬件和軟件平臺(tái),用于評(píng)估和開發(fā)基于英飛凌 XMC1300 系列微控制器的 PMSM FOC 無傳感器系統(tǒng)。該套件適用于風(fēng)扇、泵和電動(dòng)自行車等目標(biāo)終端應(yīng)用,包括一個(gè)帶有可拆卸 SEGGER J-Link 調(diào)試接口的 XMC1300 MCU 板和一個(gè) PMSM 低壓、15W 電機(jī)卡。
審核編輯:劉清
非常好我支持^.^
(0) 0%
不好我反對(duì)
(0) 0%
相關(guān)閱讀:
- [電子說] 步進(jìn)電機(jī)開環(huán)控制與閉環(huán)控制有什么區(qū)別? 2023-10-24
- [伺服與控制] 電機(jī)分類與優(yōu)缺點(diǎn)分析 伺服電機(jī)與步進(jìn)電機(jī)性能對(duì)比 2023-10-24
- [電子說] 基于工業(yè)樹莓派和MQTT平臺(tái)打通OT和IT 2023-10-24
- [電子說] 基于S7-1200 PLC的步進(jìn)電機(jī)位置控制系統(tǒng)設(shè)計(jì) 2023-10-23
- [電子說] 步進(jìn)電機(jī)失步的原因和解決辦法 2023-10-23
- [電子說] 內(nèi)置式永磁同步電機(jī)復(fù)矢量電流調(diào)節(jié)器設(shè)計(jì) 2023-10-23
- [電子說] 達(dá)林頓晶體管除常用于步進(jìn)電機(jī)驅(qū)動(dòng)器外,還可以用于什么? 2023-10-23
- [電子說] ADITrinamic推出新款集成驅(qū)動(dòng)控制一體的步進(jìn)電機(jī)IC-TMC5272 TMC52 2023-10-22
( 發(fā)表人:劉芹 )