光電編碼器原理結構圖
增量式光電旋轉編碼器
??? 所謂編碼器即是將某種物理量轉換為數字格式的裝置。運動控制系統中的編碼器的作用是將位置和角度等參數轉換為數字量。可采用電接觸、磁效應、電容效應和光電轉換等機理,形成各種類型的編碼器。運動控制系統中最常見的編碼器是光電編碼器。
?? ? 光電編碼器根據其用途的不同分為旋轉光電編碼器和直線光電編碼器,分別用于測量旋轉角度和直線尺寸。光電編碼器的關鍵部件是光電編碼裝置,在旋轉光電編碼器中是圓形的碼盤(codewheel或codedisk),而在直線光電編碼器中則是直尺形的碼尺(codestrip)。碼盤和碼尺根據用途和成本的需要,可由金屬、玻璃和聚合物等材料制作,其原理都是在運動過程中產生代表運動位置的數字化的光學信號。
?

??? 上面所說的是透射式光電編碼器的原理。顯然利用光反射原理也可制作光電編碼器。
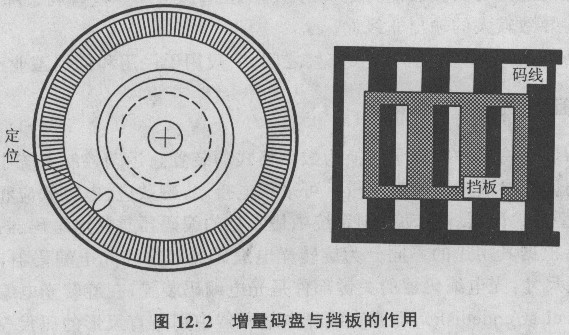
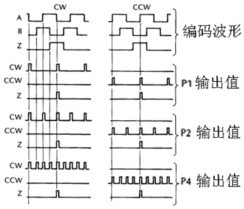
?? ? 在圖12.1的設計中安排了六組這樣的擋板和光電器件組合,其中兩組用于產生定位(index)脈沖信號I(有的文獻中為Z)。其他四組由于位置的安排,產生4個在相位上依次相差90°的準正弦波信號,分別稱為A、B、A和B。將相位相差180°的A和A送到一個比較器的兩個輸入端,則在比較器的輸出端得到占空比為50%的方波信號A。同理,由B和B也可得到方波信號B。這樣通過光電檢測器件位置的特殊安排,得到了雙通道的光電脈沖輸出信號A和B(見圖12.3)。這兩個信號有如下特點:
??? (1)兩者的占空比均為so%;圖12.3雙通道信號的形成
??? (2)如果朝一個方向旋轉時A信號在相位上領先于B信號90°的話,那么旋轉方向反過來的時候,B信號在相位上領先于A信號90°。
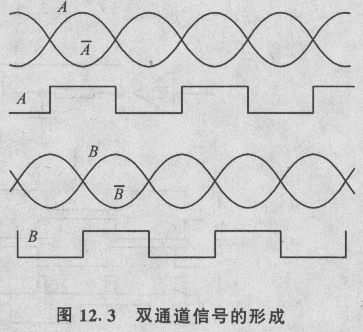
?? ? 這種雙通道信號的特點為測量分辨率的提高和方向信號的獲取提供了條件。
??? 占空比為so%的方波信號A和B中有4個特殊的時刻,就是它們波形的前沿和后沿。
兩個信號的前后信號在波形的一個周期中是按90°平均分布的。將這些沿信號取出并加以利用,可得到4倍頻的脈沖信號,這樣就可把光電編碼器的分辨率提高到4倍。
??? 圖12.4是一個由數字電路組成的處理電路,在這個電路中采用了施密特輸入的反相器、異或門、或門和D觸發器。電路中各處波形如圖所示,用虛線隔開分別表示正轉和反轉兩種情況下的波形。可以看到該電路產生4倍頻計數信號和方向信號。使用這些信號再加上定位脈沖的配合,電子線路就可以通過對脈沖的計數來確定運動系統的位置。可以采用計數器使得其在轉軸朝某一方向旋轉時進行增數,而在朝相反方向旋轉時進行減數,這樣就可以在不掉電的前提下保持對絕對位置的記憶。
?望遠鏡的軸角位置指示
?????????????????????????????? 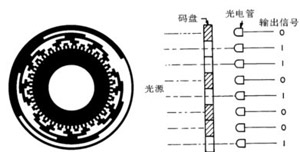
圖 3.17 一個八位編碼器的(a)碼盤和(b)編碼器的工作原理圖
?
??? 近代工業已經為望遠鏡的軸角系統提供了一系列的軸角位置指示裝置。這些裝置包括光電編碼器,圓感應同步器以及光柵刻尺。
??? (1)光電編碼器
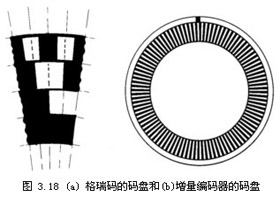
??? 光電編碼器是一種二進制光電位置指示器,其基本原理是由不同等分的明暗相間的條紋,通過光電元件取得角度位置的二進制數字信號,最后進行解碼取得角度位置的絕對值或相對值。絕對編碼器的碼形總是唯一的,這種碼形給出了長度或角度的位置。光電編碼器由光源,碼盤和光電接收器所組成。碼盤是編碼器中的最重要的器件。圖3.17是一個八位編碼器的碼盤和編碼器的工作原理圖。這里的碼盤是一種自然碼盤。絕對編碼器的碼形有多種形式。一種叫做格瑞碼 的碼盤特別適用于光學編碼器(見圖3.18(a))。這種碼盤每進一格僅改變一個數碼,不易產生錯碼現象。
?
????? 
?
?
?
?
??? 為了獲得更為精細的分辨本領一種用光柵讀頭的方法可以達到這個目的。(見圖3.20)這時在旋轉光柵的后面加上了一個小的子光柵。當相干光照射在光柵盤上時,在子光柵面上的光強為(leki,1999):

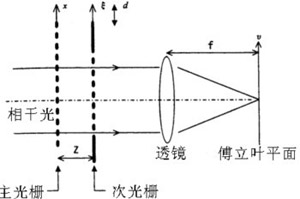

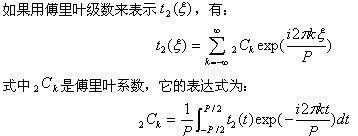
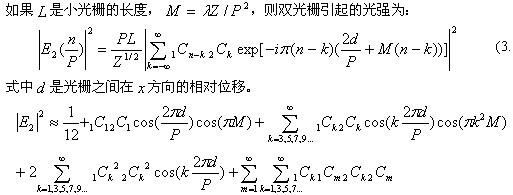
?

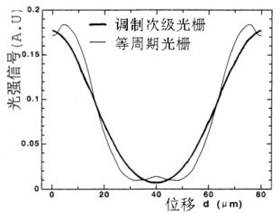
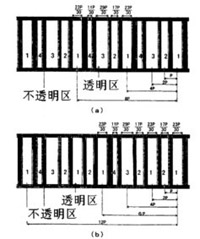
圖 3.22 增量編碼器的兩種調制子光柵的光柵具體尺寸(leki,1999)
?
??? 現代光柵技術結合 的本身的精度也可以極大地提高光電編碼器的精度。一個16位的增量編碼器,如在其碼盤上加上16位的絕對碼圖案,通過 使增量碼兩相鄰條紋同時成像,則 會給出碼盤的精確位置,以至于獲得24位以上的絕對編碼器的精度,這是十分重要的技術進展。
??? (2)圓感應同步器
??? 另一種類似的軸角編碼裝置是圓感應同步器。與光電編碼器不同,圓感應同步器是一種模擬裝置。各個數值的變化是連續的,而不是跳動式的。圓感應同步器的基本原理如圖3.23所示,它由定子和動子所組成。它的動子只有一個線圈,而在它的定子上,有 個線圈構成 個極。它的每一個線圈之間的夾角是 度。當在動子中輸入交流電壓 ,并且動子軸線和定子的零點偏離一定角度 時,則在定子上的各個線圈內就會產生不同量的電流。如圖3.24中所示,有:
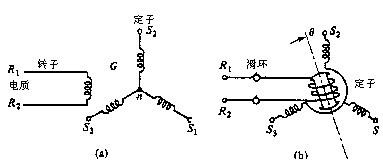
圖3.23 圓感應同步器的基本原理
?

?
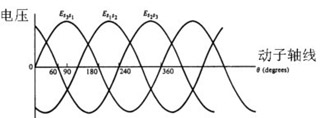
圖3.24 圓感應同步器定子上的各個線圈內的輸出電壓
?
式中
?
?
?
?
?
?
?
?
?
利用圓感應同步器這一特性,就可以用來測定微小角度的變化。在使用圓感應同步器時為了測定角度的絕對位置,還要加上一個粗碼盤。比較光電編碼器,圓感應同步器有如下幾個好處:(a)線圈動定盤比較便宜,(b)對環境要求較低,可以用于溫度變化和有振動的場合。
??? (3)編碼器的應用和其它角度測定方法
??? 應用光電編碼器在控制回路中要采用數模轉換裝置,而圓感應同步器可以直接用于同步驅動的控制。不過它們兩種都能實現軸角位置的絕對指示或者增量指示。它們的位置精度高,誤差的重復性能好,只是高位數的指示器價格較高。光柵帶尺加摩爾條紋的軸角指示方法是近年新發展起來的,這種方法特別適用于大口徑的望遠鏡。這種光柵帶尺的精度約小于1微米,一般是均勻地粘貼在大型驅動輪的邊緣,并通過摩爾條紋給出高達 的分辨精度。光柵帶尺的缺點是不能保證全部條紋的一致性,這需要在計算機控制中使用列表法予以校正。在望遠鏡中光柵帶尺常用于位置的絕對定標。
?
??? 望遠鏡絕對定位精度是為了準確導星、定位的需要,而增量定位則是為了精確導星的要求。因此增量編碼器要求有較高的分辨精度。絕對編碼器可以直接與望遠鏡傳動軸連接,這時位置指示沒有其它的誤差因素。但是有的時候由于編碼器的位數較低或者望遠鏡傳動軸需要通過光線,也可以將編碼器裝置在第一級齒輪付上。這時編碼器的分辨精度得到放大,但同時齒輪的誤差也將影響角度絕對值顯示的精度。這一誤差對絕對位置定標有很大的影響。但是近年來有不少望遠鏡采用了分辨精度高的增量放大指示裝置,而使用別的重復性極好的裝置,如高靈敏度的水平儀或者特別的光柵刻線來提供軸角位置的絕對零點,這樣就不再需要昂貴的絕對編碼器了。在一些較新的望遠鏡中還有利用精密電磁開關來作為軸角絕對位置的編碼,這種電磁開關的重復性精度約為1微米。在這種設計中每隔10或者15度就安裝一個精密電磁開關。在每一個精密電磁開關之間,使用增量編碼器,甚至可以使用磨擦面來帶動一個低位的增量編碼器。這種設計要比較其它設計成本更低。各種編碼器都要進行正確的安裝,才能發揮其分辯精度。當編碼器和軸連接時,最重要的就是要避免在編碼器軸上施加任何力和力矩。因此編碼器的聯軸器應該在軸向和徑向上強度比較低,而在圓周方向上強度很高。
??? 對于新型的六桿平臺式的望遠鏡,有的還安裝了一種叫光纖諧振陀螺儀的測角裝置。一種光纖諧振陀螺儀總共包括三個光纖回路。從頻寬很小的激光二極管向一根光纖的一端發出一束光,同時這一光纖的末端繞回到起始端并與起始端處的光纖通過一個光藕合器藕合,形成一個在兩個方向上都有光線通過的回路。在這個回路的中部,又有另一個光藕合器使得第一個回路和第二個光纖環實現藕合。同時在第二個光纖環中的對面又有第三個光藕合器以實現第二光纖環和第三光纖回路的藕合。第三光纖回路是一個開環回路,兩端和探測器相連。這種系統中如果所有的回路和藕合器均為固定的并且在第二個光纖回路中兩個藕合器正好位于回路的對稱點上,它就會對一個特定的波長的光產生諧振。而當第二個回路相對于第一個回路有一個很小的轉角時,在第二個回路中會在一個方向上的光路增加,而在另一個方向上的光路減少,因此新的系統會在兩個不同的頻率上產生諧振。比較原有的諧振頻率,其中一個頻率要大些,另一個則小些。測量諧振頻率的變化就可以來了解角度的變化,以達到角度測量的目的。
更多編碼器知識請訪問http://www.asorrir.com/zhuanti/20111111242149.html
非常好我支持^.^
(56) 21.2%
不好我反對
(208) 78.8%
相關閱讀:
- [電子說] CANOPEN總線編碼器在車輛技術中的應用 2023-10-24
- [工業控制] MOVIPRO:電機初始化Starting up the motor encoder 2023-10-24
- [電子說] 揭秘編碼器與解碼器語言模型 2023-10-24
- [MEMS/傳感技術] 磁性編碼器與光電編碼器的區別、特性、優勢 2023-10-24
- [電子說] 磁性編碼器與光電編碼器的區別在哪? 2023-10-24
- [電子說] 多圈編碼器和單圈編碼器區別 2023-10-23
- [電子說] MIPI CPHY之編碼技術簡介 2023-10-23
- [工業控制] CANOPEN伺服電機的回零控制方法分享 2023-10-23
( 發表人:小蘭 )