電機(jī)位置編碼器廣泛用于伺服驅(qū)動(dòng)器、機(jī)器人、機(jī)床、印刷機(jī)、紡織機(jī)和電梯等工業(yè)電機(jī)控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會(huì)帶來(lái)一些棘手的電磁兼容(EMC)問(wèn)題。為幫您應(yīng)對(duì)這些挑戰(zhàn),筆者將以
2018-05-16 08:43:56 8250
8250 ? ?1.?最常見(jiàn)的電機(jī)位置傳感器有哪些? 用于電機(jī)的最先進(jìn)的位置傳感器被認(rèn)為是基于旋轉(zhuǎn)變壓器(resolver-based)和編碼器(encoder-based)的傳感器。 1.1基于旋轉(zhuǎn)
2023-08-30 09:09:022853 
0 前言這一節(jié)我們來(lái)學(xué)習(xí)DSP的EQEP模塊的功能。實(shí)驗(yàn)?zāi)繕?biāo):通過(guò)光電編碼器,將采集直流減速電機(jī)的轉(zhuǎn)速并顯示在LCD1602上。由于28335控制LCD1602的例程并不多,在下面解釋的過(guò)程會(huì)詳細(xì)
2021-07-05 07:37:29
逆變器換相與轉(zhuǎn)子同步來(lái)驅(qū)動(dòng)電機(jī)持續(xù)運(yùn)轉(zhuǎn)。盡管直流無(wú)刷電機(jī)也可以通過(guò)定子繞組產(chǎn)生的反感生電動(dòng)勢(shì)來(lái)檢測(cè)轉(zhuǎn)子的位置,而省去位置傳感器,但是電機(jī)啟動(dòng)時(shí),轉(zhuǎn)速太小,反感生電動(dòng)勢(shì)信號(hào)太小而無(wú)法檢測(cè)。位置傳感器可以用
2019-06-28 04:20:10
可以通過(guò)定子繞組產(chǎn)生的反感生電動(dòng)勢(shì)來(lái)檢測(cè)轉(zhuǎn)子的位置,而省去位置傳感器,但是電機(jī)啟動(dòng)時(shí),轉(zhuǎn)速太小,反感生電動(dòng)勢(shì)信號(hào)太小而無(wú)法檢測(cè)。可以用作直流無(wú)刷電機(jī)位置傳感器的霍爾傳感器芯片分為開(kāi)關(guān)型和鎖定型兩種
2016-10-09 15:13:14
,電機(jī)速度PID控制的結(jié)構(gòu)圖如下,目標(biāo)值是設(shè)定的速度,通過(guò)編碼器獲取電機(jī)的轉(zhuǎn)速作為反饋,實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的控制。再來(lái)看電機(jī)位置PID控制,其結(jié)構(gòu)圖如下,目標(biāo)值是設(shè)定的位置,通過(guò)編碼器獲取電機(jī)累計(jì)轉(zhuǎn)動(dòng)的脈沖數(shù)作為反饋,實(shí)現(xiàn)電機(jī)位置的控制。所以:對(duì)比兩張圖,速度控制與位置控制的主要區(qū)別,就是控制量的不同。
2021-06-29 07:39:25
電機(jī)評(píng)價(jià)功能可測(cè)量扭矩和轉(zhuǎn)速 高性能功率分析儀WT1800: 最多可配置6個(gè)輸入單元; 能以5MHz(U/I)寬帶寬同時(shí)測(cè)量DC-DC轉(zhuǎn)換器/逆變器的輸入和輸出; 電機(jī)
2018-09-23 20:13:32
電機(jī)位置信號(hào)的重要性在永磁同步電機(jī)FOC控制算法中,需要用到一個(gè)非常重要的物理量是電機(jī)的位置信號(hào)。這個(gè)位置信號(hào)到底有多重要呢?還是用數(shù)據(jù)來(lái)說(shuō)話吧。筆者搭建了一個(gè)電機(jī)的電流環(huán)仿真模型,固定電機(jī)轉(zhuǎn)速
2021-08-27 07:36:41
我要做電機(jī)位置隨動(dòng)的仿真,就是模擬信號(hào)轉(zhuǎn)化數(shù)字量,然后電機(jī)根據(jù)數(shù)字指令轉(zhuǎn)相應(yīng)角度(位置),電機(jī)用的是位置編碼電機(jī)就是可以發(fā)出脈沖數(shù)的那種,,真得很急用啊 ,,有沒(méi)有大神幫幫忙,或者給我個(gè)思路也可以。!!!!
2014-09-09 01:22:09
采用非接觸式的光反射轉(zhuǎn)速測(cè)量法,傳感器與被測(cè)軸之間無(wú)任何機(jī)械連接,不會(huì)由于安裝傳感器而影響被測(cè)軸轉(zhuǎn)速,適于小型電機(jī)乃至微型電機(jī)的轉(zhuǎn)速測(cè)量,且對(duì)于由于結(jié)構(gòu)等原因不允許固定安裝測(cè)速傳感器的情況更為方使
2018-01-18 14:40:27
作品簡(jiǎn)介:本設(shè)計(jì)采用AT89C52單片機(jī)作為整個(gè)系統(tǒng)控制的核心。采用PID算法中的增量式PI方式完成對(duì)電機(jī)轉(zhuǎn)速的精確控制,采用紅外檢測(cè)模塊對(duì)電機(jī)轉(zhuǎn)速進(jìn)行采集,并對(duì)反饋回來(lái)的信號(hào)進(jìn)行調(diào)理,作為對(duì)電機(jī)
2021-09-02 07:11:15
直流電機(jī)測(cè)速+中文液晶顯示一、實(shí)驗(yàn)?zāi)康亩?shí)驗(yàn)內(nèi)容三、實(shí)驗(yàn)步驟四、C代碼如下五、實(shí)驗(yàn)結(jié)果六、實(shí)驗(yàn)體會(huì)一、實(shí)驗(yàn)?zāi)康谋疚慕榻B了一種基于AT89C51單片機(jī)平臺(tái),采用光電傳感器實(shí)施電機(jī)轉(zhuǎn)速測(cè)量的方法,硬件
2021-12-03 08:20:09
采用碼盤對(duì)直流電機(jī)轉(zhuǎn)速進(jìn)行測(cè)量的Multisim仿真應(yīng)該怎么做
2022-09-17 18:36:14
27VDC。四、工作量要求1、完成控制系統(tǒng)原理圖設(shè)計(jì);2、完成直流伺服電機(jī)位置控制系統(tǒng)建模,PID控制器的設(shè)計(jì),基于LABVIEW的實(shí)時(shí)控制軟件開(kāi)發(fā)及實(shí)驗(yàn),完成仿真結(jié)果與實(shí)驗(yàn)結(jié)果的對(duì)比分析,并提出改進(jìn)措施
2019-04-02 09:40:03
各位專家好,我最近在用AD2S1210采集電機(jī)位置時(shí)發(fā)現(xiàn)有時(shí)連續(xù)好幾個(gè)周期采到的電機(jī)碼值都相同,而且轉(zhuǎn)速越高這種情況越多。現(xiàn)象很固定,不是碼值亂跳,也不是上下波動(dòng),而是不變。請(qǐng)問(wèn)ADI專家這可能由什么原因所引起呢?謝謝!
2018-09-12 11:23:07
一定的位置變化,這時(shí)需要的控制量就不再是電機(jī)的轉(zhuǎn)速,而是控制對(duì)象的直線位移,因此需將電機(jī)的轉(zhuǎn)速輸出轉(zhuǎn)換為電機(jī)的位移輸出。
2019-08-20 08:00:58
生產(chǎn)機(jī)械或其機(jī)構(gòu)產(chǎn)生一定的位置變化,這時(shí)需要的控制量就不再是電機(jī)的轉(zhuǎn)速,而是控制對(duì)象的直線位移,因此需將電機(jī)的轉(zhuǎn)速輸出轉(zhuǎn)換為電機(jī)的位移輸出。1 電機(jī)位置控制模塊的設(shè)計(jì)1.1 直流電機(jī)位置控制的方法 在此
2020-10-23 11:37:01
生產(chǎn)機(jī)械或其機(jī)構(gòu)產(chǎn)生一定的位置變化,這時(shí)需要的控制量就不再是電機(jī)的轉(zhuǎn)速,而是控制對(duì)象的直線位移,因此需將電機(jī)的轉(zhuǎn)速輸出轉(zhuǎn)換為電機(jī)的位移輸出。1 電機(jī)位置控制模塊的設(shè)計(jì)1.1 直流電機(jī)位置控制的方法 在此
2020-04-15 13:53:20
Proteus實(shí)現(xiàn)編碼器電機(jī)轉(zhuǎn)速及方向檢測(cè)原理圖代碼原理圖控制編碼電機(jī)采用的是最簡(jiǎn)單的開(kāi)關(guān)控制正反電壓的輸入,滑動(dòng)變阻器控制電機(jī)轉(zhuǎn)速,也可以采用數(shù)字IC去控制電機(jī)轉(zhuǎn)速以及方向,如L298N電機(jī)驅(qū)動(dòng)
2021-06-30 07:44:52
業(yè)界各位親們,眾所周知,在電機(jī)控制世界里,要想做到精確控制,位置和電流采集是至關(guān)重要的,所以能否請(qǐng)各位能否分享一下經(jīng)驗(yàn):1,如何保證電流采集量的準(zhǔn)確性?2,如何保證電機(jī)位置采集的準(zhǔn)確性?AU6802
2016-10-24 20:45:11
隨著simulink版本的更新,一些模塊存放位置發(fā)生變換,老版本中電機(jī)位置在目錄SimPowerSystems>>Machines目錄下就是各種自帶的電機(jī)模型2018版本的電機(jī)位置在
2020-05-15 16:31:46
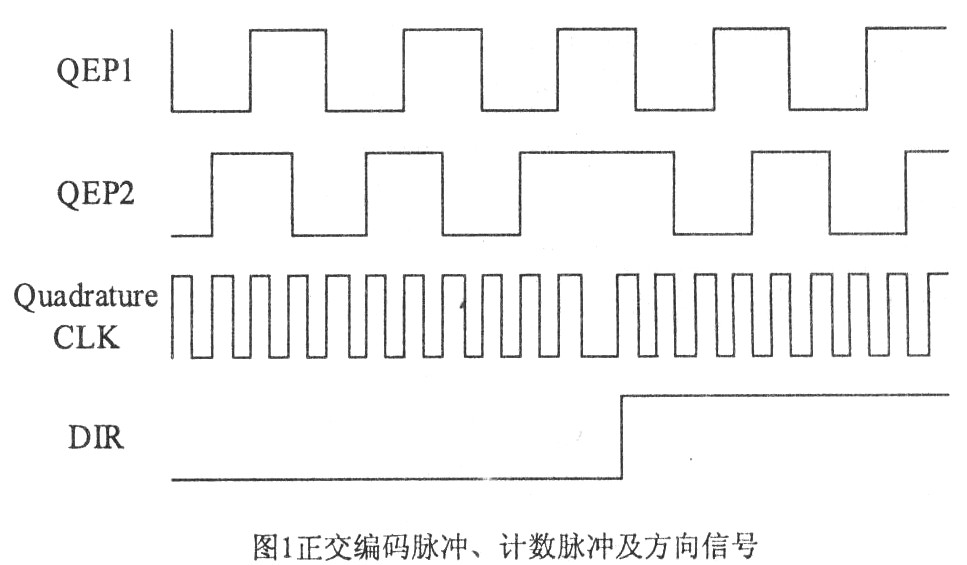
轉(zhuǎn)速(三級(jí)調(diào)速,按鍵一次改變一次速度);③ 利用QEP采樣電路檢測(cè)電機(jī)轉(zhuǎn)速; ④ 數(shù)碼管顯示電機(jī)當(dāng)前轉(zhuǎn)速。 ⑤理解直流電機(jī)雙極性驅(qū)動(dòng)電路的原理,利用事件管理器產(chǎn)生正確的PWM控制波形.
2015-09-10 11:20:00
。很多系列的單片機(jī)中都具有SPI及正交編碼器脈沖電路(QEP),例如STM32單片機(jī)、TI公司的DSP芯片等,它們都能夠處理AS5040絕對(duì)角度和增量角度信號(hào)。下圖二為使用AS5040系列磁編碼器位置檢測(cè)
2021-09-22 09:41:15
現(xiàn)代永磁同步信息交流伺服控制系統(tǒng)一股可以采用編碼器作為轉(zhuǎn)子位置檢測(cè)技術(shù)裝置。 光電編碼器分為增量式和絕對(duì)式,增量式光電編碼器與絕對(duì)編碼器相比,增量編碼器具有成本低、布線簡(jiǎn)單、可靠性高等優(yōu)點(diǎn)
2020-06-30 10:28:19
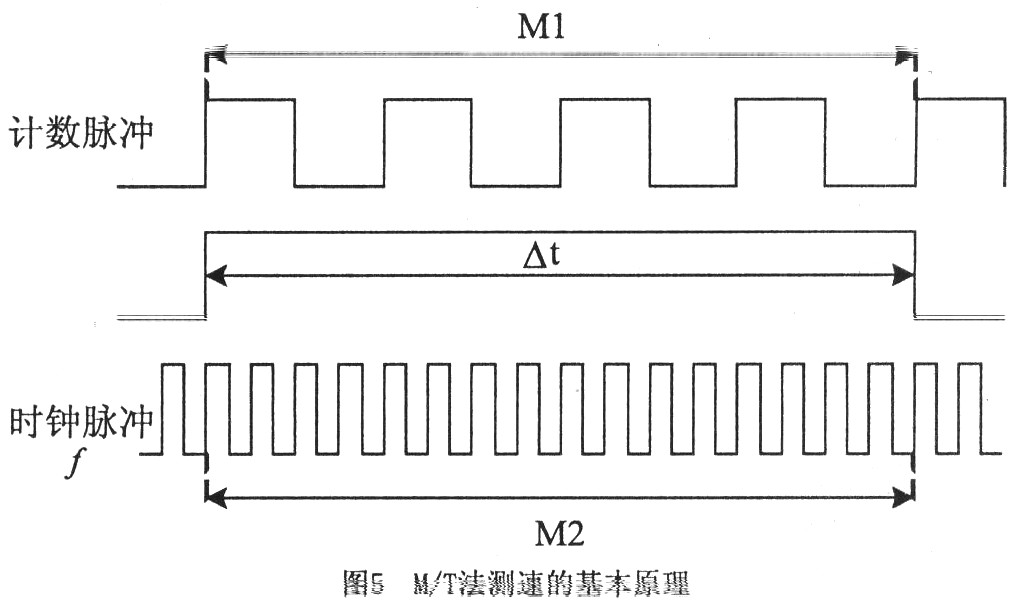
光電編碼器測(cè)量電機(jī)轉(zhuǎn)速的方法有哪些?可以通過(guò)定時(shí)器/計(jì)數(shù)器根據(jù)光電編碼器的輸出脈沖信號(hào)測(cè)量電機(jī)的轉(zhuǎn)速。 具體的速度方法有m法、t法、M/T法3種。一、m法也稱為頻率測(cè)量法,其速度原理是在規(guī)定的檢測(cè)
2023-05-25 10:19:20
本人現(xiàn)在已經(jīng)通過(guò)DSP2812中SCIA接收上位機(jī)發(fā)送的數(shù)據(jù)來(lái)控制電機(jī)的轉(zhuǎn)速,采用CAP3來(lái)捕獲光電編碼器來(lái)測(cè)量電機(jī)的轉(zhuǎn)速,現(xiàn)在想在程序里面添加PID調(diào)節(jié)電機(jī)的轉(zhuǎn)速,主要通過(guò)PID輸出調(diào)整PWM波形的占空比來(lái)調(diào)節(jié)電機(jī)的轉(zhuǎn)速,請(qǐng)各位大神賜教
2017-09-06 21:27:11
錯(cuò)時(shí),系統(tǒng)能以安全地方式停止運(yùn)行。電流檢測(cè)放大器通常用于間接精確測(cè)量電機(jī)負(fù)載,一般應(yīng)用于三個(gè)電機(jī)相位中的兩個(gè)相位,提供額外的診斷信息(可以作為整體系統(tǒng)安全保障措施的一部分)。此外,高度準(zhǔn)確的電機(jī)位置
2020-01-13 10:03:53
束的9號(hào)端子上ECM未檢測(cè)到發(fā)動(dòng)機(jī)轉(zhuǎn)速或位置信號(hào),被認(rèn)為是故障,并以故障碼121存儲(chǔ)該故障,這時(shí)黃色警告燈點(diǎn)亮。由于該故障的存在,發(fā)動(dòng)機(jī)將無(wú)法工作。 圖1 發(fā)動(dòng)機(jī)位置傳感器(EPS)電路 (1
2018-10-31 17:39:11
電機(jī)位置編碼器廣泛用于伺服驅(qū)動(dòng)器、機(jī)器人、機(jī)床、印刷機(jī)、紡織機(jī)和電梯等工業(yè)電機(jī)控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會(huì)帶來(lái)一些棘手的電磁兼容(EMC)問(wèn)題。為幫您應(yīng)對(duì)這些挑戰(zhàn),筆者將以
2018-09-05 16:07:42
課題是永磁同步電機(jī)位置控制,看了很多文章,然并卵,最好是基于智能算法的就更好了。
2015-12-31 10:38:24
如何測(cè)量電機(jī)轉(zhuǎn)子的位置?
2021-09-24 07:03:45
本設(shè)計(jì)中,我采用了AT89C51單片機(jī),芯片工作電壓約為5V左右,從左到右我設(shè)計(jì)的依次是電容濾波的三相橋式不可控整流電路,直流電機(jī)H橋驅(qū)動(dòng)電路,中間穿插了電壓、電流檢測(cè),轉(zhuǎn)速和溫度檢測(cè)。其中我比較
2021-09-07 09:32:56
怎么才能實(shí)現(xiàn)高精度的步進(jìn)電機(jī)位置控制
2023-10-13 07:40:50
封閉體內(nèi)電機(jī)轉(zhuǎn)速測(cè)量儀的研制:以小型往復(fù)式制冷壓縮機(jī)為典型研究對(duì)象,通過(guò)對(duì)其封閉殼體的振動(dòng)分析,指出了殼體振動(dòng)的基頻即為電機(jī)的轉(zhuǎn)速。提出了一種基于微機(jī)技術(shù)的通過(guò)測(cè)量振動(dòng)基頻來(lái)間接測(cè)量封閉體內(nèi)電機(jī)轉(zhuǎn)速的方法以及裝置構(gòu)成。關(guān)鍵詞:封閉體;電機(jī)轉(zhuǎn)速;測(cè)量[hide][/hide]
2009-08-08 09:58:38
我現(xiàn)在搞異步電機(jī)位置控制。請(qǐng)問(wèn)高手,電機(jī)精確定位硬件上有什么特殊要求嗎?謝謝!我電機(jī)上接了碼盤,可是電機(jī)有慣性,發(fā)送停止命令,電機(jī)還要再轉(zhuǎn)一下才停。怎么解決?謝謝!
2018-11-22 10:04:51
目前做一個(gè)電機(jī)位置控制時(shí),遇到一個(gè)問(wèn)題: 目的是直流電機(jī)轉(zhuǎn)動(dòng)一圈停止,電機(jī)起始位置與停止位置始終在同一位置 電機(jī)轉(zhuǎn)動(dòng)一圈后,編碼器輸出1000個(gè)電平跳變信號(hào),當(dāng)我讀取到1000信號(hào)時(shí),停止電路
2020-03-13 05:20:31
關(guān)于電機(jī)轉(zhuǎn)子初始位置檢測(cè)的方法電機(jī)轉(zhuǎn)子檢測(cè)的目的對(duì)位置的幾種方法使用d軸電流吸合時(shí)的電角度解算使用q軸電流吸合時(shí)的電角度解算總結(jié)電機(jī)轉(zhuǎn)子檢測(cè)的目的電機(jī)實(shí)現(xiàn)閉環(huán)需要電機(jī)的轉(zhuǎn)速和轉(zhuǎn)子實(shí)際位置的反饋量
2021-09-16 06:48:03
。AS5040磁旋轉(zhuǎn)編碼器能夠滿足高精度、高可靠性、低成本的設(shè)計(jì)要求。 那么將AS5040磁旋轉(zhuǎn)編碼器應(yīng)用于永磁同步電機(jī)位置檢測(cè)時(shí),需要解決兩個(gè)問(wèn)題:一是磁旋轉(zhuǎn)編碼器安裝位置初始定位,即確定編碼器輸出的位置
2023-03-09 15:30:26
關(guān)斷驅(qū)動(dòng)信號(hào),起到保護(hù)電路的作用。 轉(zhuǎn)子位置檢測(cè)電路采用1/2電壓采樣法來(lái)實(shí)現(xiàn),對(duì)電機(jī)的三相端電壓及直流母線電壓分別進(jìn)行采樣,并將采樣結(jié)果送入比較器進(jìn)行比較,從而得到過(guò)零點(diǎn)的時(shí)刻,其結(jié)果送入DSP
2018-11-07 10:41:54
`采用FOC控制方法對(duì)無(wú)刷直流電機(jī)進(jìn)行位置控制,下圖中要做什么改動(dòng)。`
2017-11-20 10:56:08
直流電機(jī)分為哪幾種?什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)可以實(shí)現(xiàn)電機(jī)轉(zhuǎn)速和位置的精確控制嗎?
2021-09-14 06:10:07
通過(guò)傳感器速度位置檢測(cè)??電碼盤、旋轉(zhuǎn)變壓器和霍爾是常用的檢測(cè)旋轉(zhuǎn)電機(jī)轉(zhuǎn)子位置的傳感器。??光電碼盤的精度較高,適于高性能的控制系統(tǒng)使用,但它的環(huán)境適應(yīng)能力較差,較大的機(jī)械沖擊和震動(dòng)會(huì)影響精度。隨著
2021-06-29 07:32:23
設(shè)計(jì)一個(gè)電機(jī)轉(zhuǎn)速測(cè)量顯示邏輯電路各位大哥有關(guān)于這個(gè)的multisim文件嗎
2017-01-08 15:02:33
大家好,想請(qǐng)教個(gè)問(wèn)題,關(guān)于直流有刷電機(jī)轉(zhuǎn)速測(cè)量的,現(xiàn)決定通過(guò)檢測(cè)電流脈沖頻率來(lái)計(jì)算轉(zhuǎn)速,但是現(xiàn)在電流可以測(cè)量的到,只是怎么通過(guò)測(cè)量來(lái)的電流信號(hào)轉(zhuǎn)換成電流頻率呢,程序中不知道怎么去編寫(xiě),希望給個(gè)思路,謝謝!
2019-01-25 06:09:04
水輪發(fā)電機(jī)組轉(zhuǎn)速的可靠測(cè)量是對(duì)其進(jìn)行有效監(jiān)視與控制的基礎(chǔ), 針對(duì) 目前水輪發(fā)電機(jī)組電氣轉(zhuǎn)速的測(cè)量以 單片機(jī) 、 P L C或二者相結(jié)合的方式為主要實(shí)現(xiàn)方式所面臨的轉(zhuǎn)速測(cè)量值
2009-04-10 10:49:03 38
38 電機(jī)的轉(zhuǎn)矩和轉(zhuǎn)速是最重要的兩個(gè)參數(shù),對(duì)它們的測(cè)量必須準(zhǔn)確。根據(jù)用戶提出的測(cè)量航空電機(jī)具體要求,本文分析了轉(zhuǎn)矩和轉(zhuǎn)速的測(cè)量原理,指出了采用應(yīng)變式和光電式傳感器構(gòu)成測(cè)
2009-07-07 08:48:5939
轉(zhuǎn)速的光學(xué)檢測(cè)電路
2009-02-09 16:23:59769 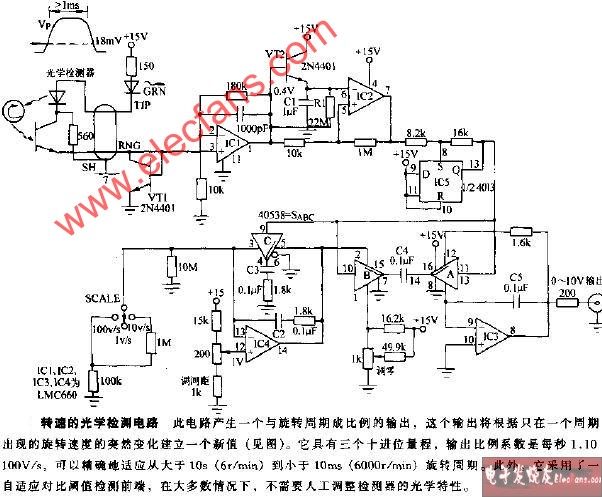
電機(jī)轉(zhuǎn)速控制電路
2009-02-16 22:01:322364 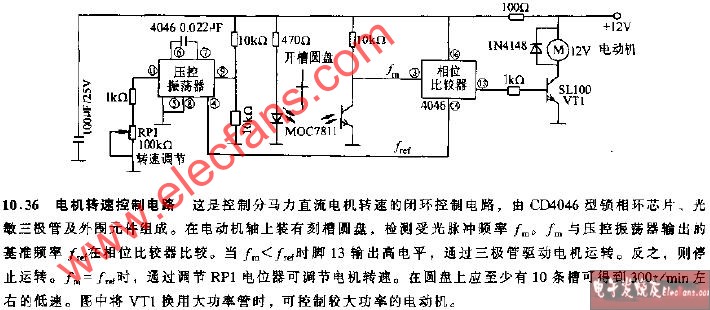
光傳感器電機(jī)轉(zhuǎn)速檢測(cè)電路
2009-04-21 11:07:07612 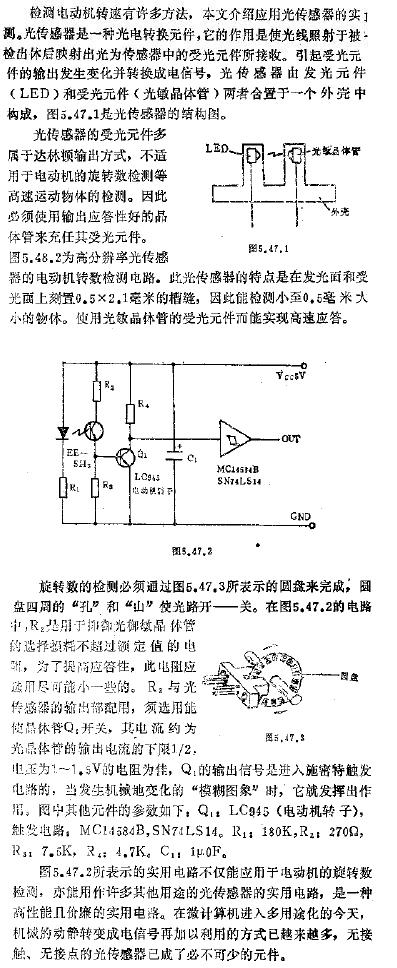
轉(zhuǎn)速測(cè)量傳感器電路
2009-04-26 12:05:252093 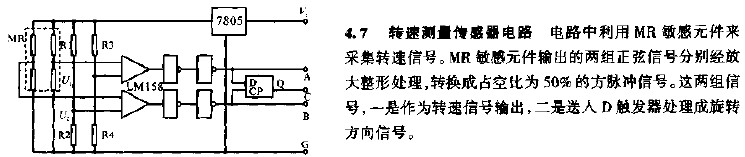
轉(zhuǎn)速檢測(cè)電路
2009-04-26 12:05:483252 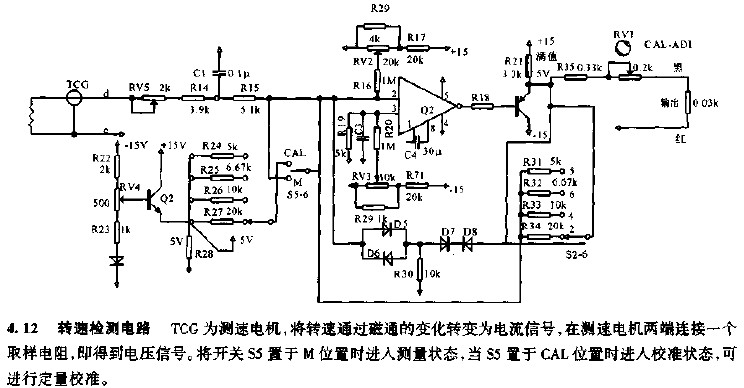
摘要:水輪發(fā)電機(jī)組轉(zhuǎn)速的可靠測(cè)量是對(duì)其進(jìn)行有效監(jiān)視與控制的基礎(chǔ),針對(duì)目前水輪發(fā)電機(jī)組電氣轉(zhuǎn)速的測(cè)量以單片機(jī)、PLC或二者相結(jié)合的方式為主要實(shí)現(xiàn)方式所面臨的轉(zhuǎn)速測(cè)量值可能非正常突變的問(wèn)題,通過(guò)增強(qiáng)轉(zhuǎn)速系統(tǒng)的軟件濾波能力來(lái)改善轉(zhuǎn)速測(cè)量值可能非正常
2011-03-01 14:37:3961 摘要:闡述了一種新研制的短行程永磁直流直線電機(jī)的工作原理,提出了基于DSP(TMS320LF2407A)的短行程直流直線電機(jī)數(shù)、模混合伺服控制系統(tǒng)方案,重點(diǎn)對(duì)直線電機(jī)的位置檢測(cè)及控制技術(shù)進(jìn)行了研究,給出了DSP控制器的位置檢測(cè)接口電路、16位雙極性數(shù)模轉(zhuǎn)換器(DAC7641
2011-03-01 15:48:4949 摘要:柴油發(fā)電機(jī)組做為備用電機(jī)電源或移動(dòng)電站廣泛用于高層建筑、銀行、機(jī)場(chǎng)和油田等場(chǎng)合。應(yīng)用中需控制柴油發(fā)電機(jī)組的轉(zhuǎn)速和電壓,使其具有良好的電氣性能。采用TMS320F2812DSP捕獲單元處理柴油發(fā)電機(jī)組的磁電式轉(zhuǎn)速傳感器信號(hào),實(shí)現(xiàn)柴油發(fā)電機(jī)組轉(zhuǎn)速數(shù)字
2011-03-01 22:57:3887 電機(jī)轉(zhuǎn)速 和轉(zhuǎn)子位置的測(cè)量在電機(jī)交直流調(diào)速控制系統(tǒng)中占有重要的位置,為提高測(cè)量的精度和避免噪聲影響,多采用數(shù)字式測(cè)量方法。基于常規(guī)的M/ T 法,提出了電機(jī)轉(zhuǎn)速和轉(zhuǎn)子位置測(cè)量
2011-07-06 17:04:34166 1.位置檢測(cè),計(jì)算過(guò)程中的變量的定義 /*-------------------------------------------------------------------- Define
2011-09-07 14:53:30229 提出一種用于異步電機(jī)位置控制的模糊神經(jīng)網(wǎng)絡(luò)(fuzzy neural network ,FNN) 控制器。其控制系統(tǒng)采用Sugeno 型FNN 和比例積分(proportional integrate , PI) 控制進(jìn)行構(gòu)建。在進(jìn)行試驗(yàn)測(cè)試之前,利用實(shí)驗(yàn)
2011-09-26 14:35:5032 基于51單片機(jī)的電機(jī)轉(zhuǎn)速測(cè)量系統(tǒng)的代碼和原理圖
2015-12-22 17:41:2246 永磁交流同步直線電機(jī)位置伺服控制系統(tǒng)設(shè)計(jì)
2016-04-26 11:02:0115 電機(jī)轉(zhuǎn)速測(cè)量系統(tǒng),很好的設(shè)計(jì)資料,快來(lái)下載學(xué)習(xí)吧。
2016-05-10 10:03:5641 電磁發(fā)射用直線感應(yīng)電機(jī)位置檢測(cè)系統(tǒng)_何娜
2017-01-08 12:03:281 基于改進(jìn)反電勢(shì)積分的永磁同步電機(jī)位置檢測(cè)_劉剛
2017-01-08 13:38:539 基于終端滑模負(fù)載觀測(cè)器的永磁同步電機(jī)位置系統(tǒng)反步控制_方一鳴
2017-01-08 13:49:171 電機(jī)位置編碼器廣泛用于伺服驅(qū)動(dòng)器、機(jī)器人、機(jī)床、印刷機(jī)、紡織機(jī)和電梯等工業(yè)電機(jī)控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會(huì)帶來(lái)一些棘手的電磁兼容(EMC)問(wèn)題。為幫您應(yīng)對(duì)這些挑戰(zhàn),筆者將以
2017-04-26 13:16:121274 電機(jī)轉(zhuǎn)速測(cè)量系統(tǒng)設(shè)計(jì)
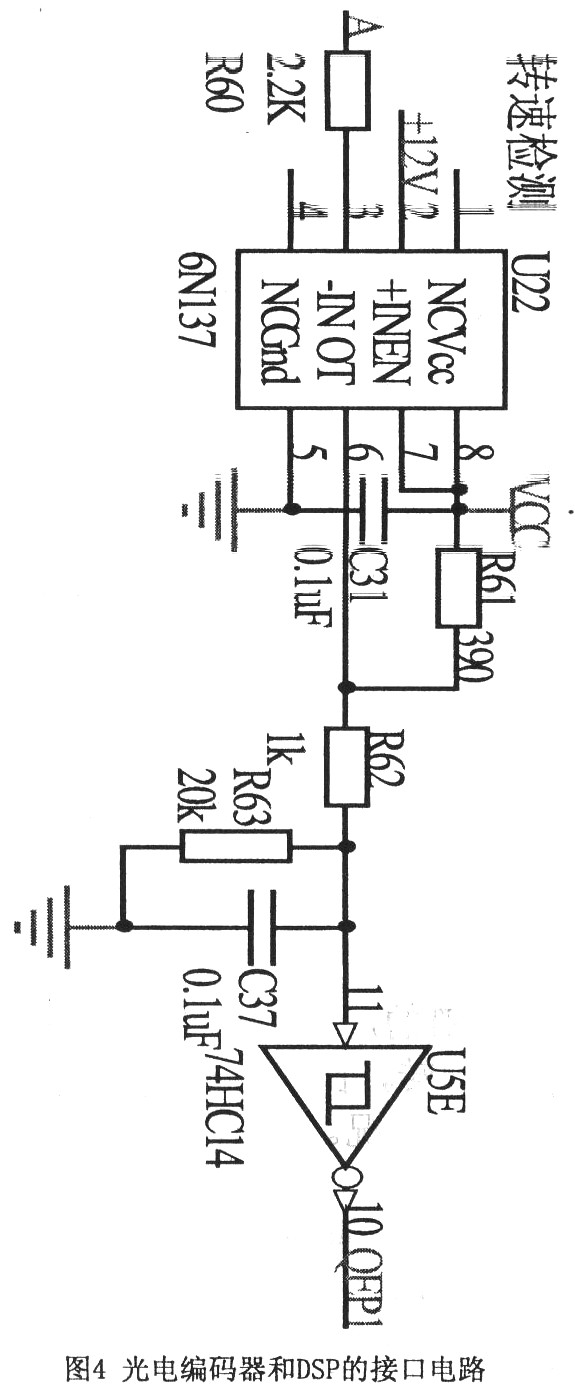
2017-07-03 16:23:51121 轉(zhuǎn)速測(cè)量的精確度與實(shí)時(shí)性影響著電機(jī)調(diào)速系統(tǒng)的性能。基于絕對(duì)式光電編碼器抗干擾能力強(qiáng),具有掉電記憶功能等優(yōu)點(diǎn),及其在電機(jī)轉(zhuǎn)子位置測(cè)量的廣泛應(yīng)用 ,設(shè)計(jì)了基于絕對(duì)式光電編碼器和數(shù)字信號(hào)處理器(DSP
2017-09-01 11:27:1632 電機(jī)位置編碼器廣泛用于伺服驅(qū)動(dòng)器、機(jī)器人、機(jī)床、印刷機(jī)、紡織機(jī)和電梯等工業(yè)電機(jī)控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會(huì)帶來(lái)一些棘手的電磁兼容(EMC)問(wèn)題。為幫您應(yīng)對(duì)這些挑戰(zhàn),筆者將以
2017-11-17 01:53:522544 直流電機(jī)因其開(kāi)關(guān)頻率高、低速運(yùn)轉(zhuǎn)穩(wěn)定,動(dòng)態(tài)性能好、功率高,廣泛應(yīng)用于現(xiàn)代自動(dòng)化工業(yè)中。本文提出了一種基于單片機(jī)測(cè)量直流電機(jī)轉(zhuǎn)速的方法。以AT89C51單片機(jī)為核心,通過(guò)霍爾傳感器(A3144E)輸出
2017-11-24 10:48:2035 、起停控制,轉(zhuǎn)速的測(cè)量和閉環(huán)調(diào)速、電機(jī)溫度、電流檢測(cè)與保護(hù)等。其中單片機(jī)外圍系統(tǒng)包括模式選擇、復(fù)位電路、晶振電路和電源4部分:電機(jī)位置傳感器的3路輸入信號(hào)HALLl/HALL2/HALL3經(jīng)上拉和濾波后分別接入PTO/PTl/PT2引腳,利用該單片機(jī)的輸入捕捉功能就
2017-12-06 09:09:3561 在高精度的電機(jī)位置控制中,位置測(cè)量直接影響著控制系統(tǒng)的控制精度。在本系統(tǒng)中,光柵尺是超聲波電機(jī)位移測(cè)量的關(guān)鍵部件。因此,對(duì)光柵尺輸出信號(hào)進(jìn)行檢測(cè)與處理是電機(jī)位置閉環(huán)控制的重要組成部分。數(shù)字信號(hào)處理器
2018-02-02 15:39:002 這部分電路實(shí)際上完成電機(jī)換相驅(qū)動(dòng)和調(diào)速的功能。C8051F313根據(jù)轉(zhuǎn)子位置檢測(cè)電路的檢測(cè)結(jié)果,對(duì)無(wú)刷直流電機(jī)進(jìn)行實(shí)時(shí)的換相驅(qū)動(dòng),同時(shí)根據(jù)轉(zhuǎn)速檢測(cè)電路檢測(cè)到的轉(zhuǎn)速對(duì)無(wú)刷直流電機(jī)進(jìn)行調(diào)速。本設(shè)計(jì)采用PWM方式對(duì)電樞電壓進(jìn)行控制,實(shí)現(xiàn)調(diào)速。
2018-04-08 11:40:012133 
電機(jī)控制系統(tǒng)中的電機(jī)位置信息采集技術(shù)
2018-08-22 00:20:003906 該單片機(jī)電機(jī)轉(zhuǎn)速測(cè)量系統(tǒng)仿真仿真采用測(cè)頻法“M法”測(cè)量電機(jī)轉(zhuǎn)速。即在一定測(cè)量時(shí)間T內(nèi),測(cè)量脈沖發(fā)生器(替代輸入脈沖)產(chǎn)生的脈沖數(shù)m1來(lái)測(cè)量轉(zhuǎn)速,計(jì)算式如下:n=60m/TP,式中:P-為轉(zhuǎn)軸轉(zhuǎn)一周脈沖發(fā)生器產(chǎn)生的脈沖數(shù);n-轉(zhuǎn)速單位:(轉(zhuǎn)/分);T-定時(shí)時(shí)間單位:(秒)。
2018-11-05 15:31:183999 在分析直線電機(jī)位置控制存在問(wèn)題的基礎(chǔ)上,實(shí)現(xiàn)了直線電機(jī)精準(zhǔn)位置控制。將Matlab和DSP完美地結(jié)合起來(lái),完成了在Matlab/Simulink中創(chuàng)建M文件,編譯生成DSP代碼,從而達(dá)到直線電機(jī)精準(zhǔn)位置
2019-10-23 17:20:2623 顧名思義,無(wú)刷直流電機(jī)沒(méi)有電刷觸點(diǎn),需要使用電機(jī)位置傳感器(MPS)來(lái)測(cè)量定子與轉(zhuǎn)子之間的相對(duì)位置,以確保定子線圈按正確順序通電。電機(jī)位置傳感器在啟動(dòng)時(shí)至關(guān)重要,因?yàn)榇藭r(shí)微控制器沒(méi)有可用的反電動(dòng)勢(shì)來(lái)確定轉(zhuǎn)子和定子的相對(duì)位置。
2020-05-04 16:57:006155 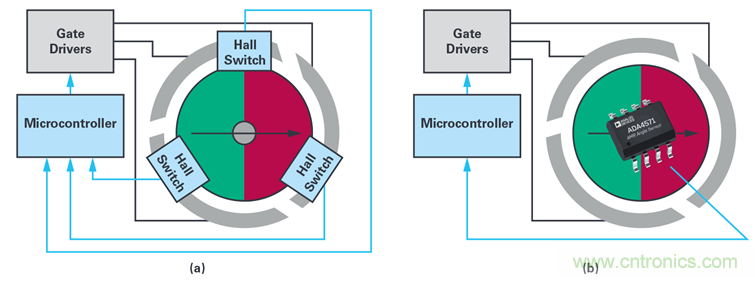
三相無(wú)刷直流電機(jī)控制系統(tǒng)框圖如圖1所示,系統(tǒng)主要由DSP控制模塊、智能功率模塊和轉(zhuǎn)子位置檢測(cè)模塊三大部分構(gòu)成。系統(tǒng)根據(jù)轉(zhuǎn)子位置檢測(cè)模塊檢測(cè)到的電機(jī)位置信號(hào),控制DSP輸出正確的6路PWM脈沖信號(hào),經(jīng)過(guò)驅(qū)動(dòng)電路以控制智能功率模塊中相應(yīng)功率管的通斷,從而實(shí)現(xiàn)對(duì)電機(jī)的正確供電,控制電機(jī)正常運(yùn)行。
2020-04-18 13:37:003381 直流無(wú)刷電機(jī)位置傳感器有:磁敏式、光電式和電磁式三種類型。 使用磁敏式位置傳感器的直流無(wú)刷電機(jī),其磁敏器件(如霍爾元件、磁敏二極管、磁敏導(dǎo)電管、磁敏電阻或?qū)S眉?b class="flag-6" style="color: red">電路等)被安裝在一個(gè)定子組件上,用于
2020-12-31 10:35:274706 無(wú)刷電機(jī)位置傳感器有:磁敏式、光電式和電磁式三種類型 使用磁敏式位置傳感器的直流無(wú)刷電機(jī),其磁敏器件(如霍爾元件、磁敏二極管、磁敏導(dǎo)電管、磁敏電阻或?qū)S眉?b class="flag-6" style="color: red">電路等)被安裝在一個(gè)定子組件上,用于檢測(cè)
2021-09-17 11:05:413088 電機(jī)轉(zhuǎn)速檢測(cè)資料分享
2022-10-08 09:35:598 電子發(fā)燒友網(wǎng)站提供《帶按鈕的Arduino控制伺服電機(jī)位置.zip》資料免費(fèi)下載
2022-11-07 15:04:253 電子發(fā)燒友網(wǎng)站提供《直流電機(jī)位置控制開(kāi)源分享.zip》資料免費(fèi)下載
2022-11-07 09:16:312 電子發(fā)燒友網(wǎng)站提供《從SD卡獲取伺服電機(jī)位置.zip》資料免費(fèi)下載
2023-01-31 10:17:080 本文將介紹“無(wú)刷電機(jī)位置傳感器的作用及其布局”相關(guān)的內(nèi)容,這也是在“無(wú)刷電機(jī)有傳感器驅(qū)動(dòng)和無(wú)傳感器驅(qū)動(dòng)的特征及區(qū)分使用”中“無(wú)刷電機(jī)有位置傳感器的驅(qū)動(dòng)”應(yīng)注意的要點(diǎn)。在無(wú)刷電機(jī)使用的位置傳感器通常是磁傳感器(霍爾元件,霍爾IC)。
2023-02-15 16:12:071849 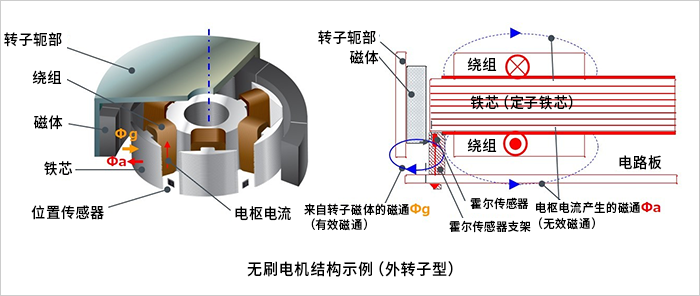
基于ADRC的永磁同步電機(jī)位置環(huán)控制 原理 仿真 總結(jié) 原理 位置環(huán)ADRC: 仿真位置環(huán)內(nèi)部:ESO內(nèi)部:參數(shù)設(shè)置:轉(zhuǎn)速環(huán):電流環(huán):電機(jī)參數(shù):螺旋槳模塊(查表法):此外螺旋槳加不加都可以,看情況
2023-03-14 09:33:071 本篇來(lái)介紹電機(jī)的位置環(huán)控制,實(shí)現(xiàn)電機(jī)快速準(zhǔn)確地轉(zhuǎn)動(dòng)到指定位置。回顧上篇,電機(jī)速度PID控制的結(jié)構(gòu)圖如下,目標(biāo)值是設(shè)定的速度,通過(guò)編碼器獲取電機(jī)的轉(zhuǎn)速作為反饋,實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的控制。再來(lái)看電機(jī)位置PID
2023-05-06 11:50:367 多維科技TMR3103和TMR3106角度編碼器芯片產(chǎn)品適用于BLDC無(wú)刷電機(jī)位置檢測(cè)、轉(zhuǎn)速檢測(cè)、閉環(huán)步進(jìn)電機(jī)位置檢測(cè)及多種非接觸式角度檢測(cè)等應(yīng)用。
2023-07-03 14:50:461000 
(1)在數(shù)控機(jī)床中,伺服電機(jī)位置模式常用于驅(qū)動(dòng)進(jìn)給軸。通過(guò)位置模式,可以實(shí)現(xiàn)對(duì)切削工具的精確位置控制,以實(shí)現(xiàn)高精度的加工操作。 (2)在自動(dòng)化生產(chǎn)線中,伺服電機(jī)位置模式常用于驅(qū)動(dòng)定位裝置、機(jī)械
2023-08-15 08:25:01484 基于步進(jìn)電機(jī)驅(qū)動(dòng)原理,對(duì)步進(jìn)電機(jī)驅(qū)動(dòng)方式進(jìn)行分析,提出了基于西門子S7-1200系列PLC的步進(jìn)電機(jī)位置控制裝置的電氣系統(tǒng)硬件接線及軟件設(shè)計(jì)。通過(guò)測(cè)試,該裝置能對(duì)位置進(jìn)行精確控制及狀態(tài)監(jiān)控,在光伏發(fā)電追光系統(tǒng)中可用于光伏板的控制,也適用于PLC運(yùn)動(dòng)控制教學(xué)實(shí)訓(xùn),在自動(dòng)化裝置中有較好的推廣價(jià)值。
2023-10-23 14:38:162574 
無(wú)磁鐵雙線圈技術(shù)為機(jī)器人、工業(yè)和醫(yī)療設(shè)備中使用的電機(jī)位置傳感器及編碼器帶來(lái)高分辨率、高精度和高可靠性
2023-10-27 10:00:55537 三相全波無(wú)刷電機(jī)(BLDC)的位置檢測(cè)是其運(yùn)行控制中至關(guān)重要的環(huán)節(jié)。位置檢測(cè)確保電機(jī)的電子換向系統(tǒng)能夠準(zhǔn)確地控制定子繞組的通電順序,從而產(chǎn)生正確的旋轉(zhuǎn)磁場(chǎng)以驅(qū)動(dòng)轉(zhuǎn)子旋轉(zhuǎn)。在無(wú)刷電機(jī)中,這一功能通常
2024-02-05 17:58:34902 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論