 電子發燒友App
電子發燒友App


麥克風,學名為傳聲器,是將聲音信號轉換為電信號的能量轉換器件,由“Microphone”這個英文單詞音譯而來。也稱話筒、微音器。二十世紀,麥克風由最初通過電阻轉換聲電發展為電感、電容式轉換,大量新的麥克風技術逐漸發展起來,這其中包括鋁帶、動圈等麥克風,以及當前廣泛使用的電容麥克風和駐極體麥克風。本文為大家介紹幾種麥克風的設計方案,僅供參考。
1引言
與傳統的駐極體電容式麥克風相比,電容式MEMS麥克風具有以下優勢:1)性能穩定,溫度系數低,受濕度和機械振動的影響小;2)成本低廉;3)體積小巧,電容式MEMS麥克風的背極板和振膜僅有最小的駐極體電容式麥克風的1/10左右;4)功耗更低。以上幾方面的優勢使電容式MEMS麥克風得到越來越廣泛的應用。
然而,電容式MEMS麥克風也給設計人員提出了挑戰:1)麥克風在聲壓作用下產生的小信號幅度非常微小,要求讀出電路的噪聲極低;2)電容式MEMS麥克風的靜態電容是pF量級,讀出電路需要GΩ量級的輸入電阻才能實現極點頻率低于20Hz的高通濾波器,因此,高阻值電阻的實現是讀出電路的又一挑戰;3)電容式MEMS麥克風通常應用于電池供電的產品,因此低功耗設計也是讀出電路設計時必須考慮的約束。
基于以上考慮,在分析電容式MEMS麥克風工作原理的基礎上,提出了一種低功耗、低噪聲、高分辨率的電容式MEMS麥克風讀出電路。
2電容式MEMS麥克風
2.1工作原理
電容式MEMS麥克風的主要結構包括一個薄而有彈性的聲學振膜及一個剛性的背極板。振膜、背極板以及它們之間的空氣隙共同組成一個平行板電容器,故有:
V=Q/C,C=εS/x (1)
式中,C為電容量,S為極板的面積,Q是極板間的電壓為V時存儲的電荷量,ε是極板間介質(空氣)的介電常數,x為兩極板間的距離。當dP大小的聲壓變化作用于振膜時,將引起兩極板間的電壓變化:

因為dx∝dP,所以輸出電壓dV∝dP.這就是電容式MEMS麥克風的聲電轉換工作原理。
這一原理成立的條件是:在聲電轉換過程中,必需保持麥克風電容所儲電荷量Q不變,因此需要外加一個穩定的直流電壓給電容充電,使之保持恒定的充電狀態。這一功能由電荷泵來實現。
2.2麥克風讀出電路結構
電容式MEMS麥克風及其讀出電路組成的系統如圖1所示。
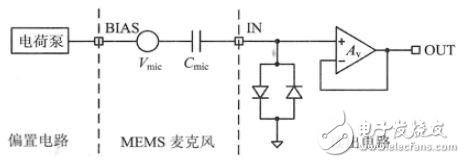
圖1麥克風及其讀出電路結構
電荷泵為麥克風提供穩定的直流電壓,以保持麥克風電容所儲電荷量不變。在此基礎上,聲壓作用于振膜時,將引起麥克風兩極板間電壓的變化,這個音頻范圍內的電壓小信號Vmic通過麥克風電容Cmic和讀出電路的高阻值輸入電阻組成的高通濾波器讀出。
需要特別指出,背靠背的二極管有三個作用:1)提供高阻值輸入電阻,與麥克風電容一起實現低極點頻率的高通濾波器,進而實現麥克風小信號的讀出;2)為單位增益緩沖器提供直流偏置電壓;3)起靜電保護作用,在讀出電路遭受靜電襲擊時為其提供低阻直流通路。單位增益緩沖器的作用一是屏蔽麥克風與后續信號處理電路,避免兩者之間相互影響,二是提高讀出電路的驅動能力。
3讀出電路設計
3.1低極點頻率高通濾波器
背靠背二極管的實際電路如圖2所示。背靠背二極管可實現虛擬電阻。二極管連接的PMOS管Ma,Mb的襯底與柵極相接,這種連接方式不會產生寄生三極管,可以保證兩個二極管串始終只有一組導通(飽和導通或亞閾值導通)。在正常工作狀態下,Ma1,Ma2亞閾值導通。仿真結果表明,當節點IN與節點A之間的電壓差絕對值小于0.2V時,背靠背二極管可以實現GΩ量級的電阻,如圖3所示。
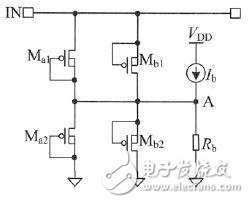
圖2背靠背二極管的電路
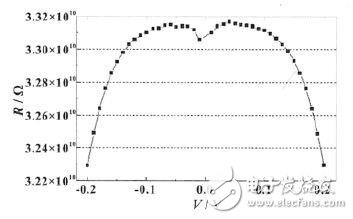
圖3背靠背二極管的電阻-電壓特性
背靠背二極管還可以為單位增益緩沖器提供直流偏置電壓。電流源Ib的電流流過電阻Rb,從而在節點A形成固定的電壓,單位增益緩沖器的輸入直流偏置也就被固定于IbRb.
背靠背二極管具有ESD保護作用,在讀出電路遭受靜電襲擊時為其提供低阻直流通路。需要注意的是,因為讀出電路對輸入阻抗要求很高,所以在設計中使用了 ESD保護電路與讀出電路內部功能性電路復用的電路,這樣可以避免在設計完功能性電路后再加上ESD保護電路而對電路性能產生重大影響。
3.2低噪聲低功耗單位增益緩沖器
較之開環運算放大器,使用單位增益緩沖器可得到比開環運放更大的輸入阻抗和更小的輸出阻抗,從而可以更好地屏蔽麥克風與后續信號處理電路,以避免兩者之間的相互影響;同時,還可以更容易地驅動后續信號處理電路。
只需將運算放大器輸出端與反相輸入端短接,即可實現單位增益緩沖器,如圖4所示。與套筒式結構相比,使用折疊結構的運算放大器最大的優點在于易于使運放的輸出與輸入短接,共模電平的選取也更加容易。
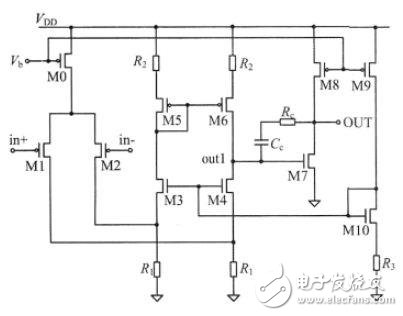
圖4運算放大器
輸入管使用尺寸較大的PMOS管,其原因主要有兩個:一是與NMOS管相比,PMOS管的1/f噪聲更小;二是輸入管直流偏置點可以設置得更低,從而使電荷泵輸出電壓大部分降落在麥克風上。
采用不對稱的輸入管,反相輸入管尺寸更大,其優點在于可以消除輸入失調電壓的影響,提高分辨率。假如設置運放反相輸入端的直流偏壓比正相輸入端高 50mV,那么,當麥克風小信號的幅值小于50mV時,讀出電路分辨率將不受失調電壓的影響。而且,反相輸入管面積越大,閃爍噪聲越小,進而減小了單位增益緩沖器的等效輸入噪聲。
工作在飽和區的MOS管的跨導與其漏極電流的平方根成正比。但是,工作在亞閾值區的MOS管的跨導與其漏極電流成正比。所以,為了在降低噪聲和功耗的同時保持運放的開環增益,設計中采用工作在亞閾值區的輸入管。忽略運放第二級對輸入噪聲的影響,音頻范圍內二級運放的等效輸入噪聲電壓為:
(3)式主要考慮了閃爍噪聲的影響。從(3)式可以看出,增大M1~M6的尺寸可以增大M1和M2的跨導,減小M3~M6的跨導可以減小閃爍噪聲。需要說明的是,在設計低功耗的二級運放時,為了降低功耗,可以讓運放中的一些管子工作在亞閾值區,但這是以增大管子面積、降低運放速度為代價的。在電路設計過程中,往往需要考慮多方面的因素來進行折中優化設計。
4電路仿真結果與分析
基于X-FAB 0.35μm CMOS工藝,使用Cadence軟件,對MEMS麥克風讀出電路進行仿真。設電荷泵輸出電壓為11V,麥克風靜態電容為1pF,設定單位增益緩沖器輸入直流電平為200mV,負載為100pF電容和100kΩ電阻的最差負載情況。輸入管不對稱的運放的性能參數如表1所示。
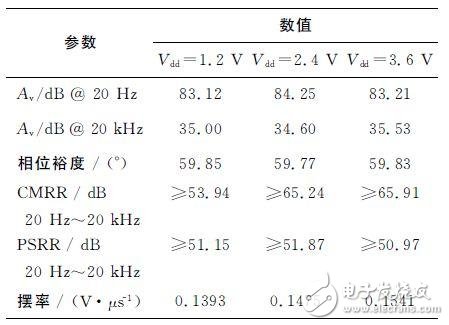
表1開環運算放大器的性能參數
電路仿真結果顯示,電源電壓在1.2~3.6V時,讀出電路均可正常工作(當電源電壓低于1.2V時,基準電流源無法正常工作,基準電流會迅速下降并趨于 0,此時,讀出電路因得不到合適的偏置而無法正常工作;當電源電壓高于3.6V時,超過了工藝耐壓的極限,極有可能對芯片造成毀滅性的損壞);讀出電路靜態電流小于60μA,在20Hz~20kHz的音頻范圍內,等效輸入噪聲為5.2μV,信號讀出效率大于83.6%(-1.56dB)。
電源電壓為1.2V時,讀出電路的幅頻響應曲線如圖5所示,低頻的極點頻率為8.6Hz.
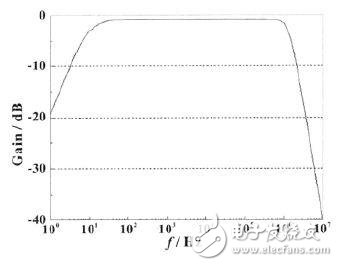
圖5讀出電路頻率響應
由于運放失調電壓的影響被不對稱輸入管消除,且電荷泵的等效輸出噪聲是nV量級(可以忽略不計),所以讀出電路可以處理的小信號幅度范圍是50μV~200mV.本文讀出電路與文獻[9]讀出電路的各項性能比較結果如表2所示。
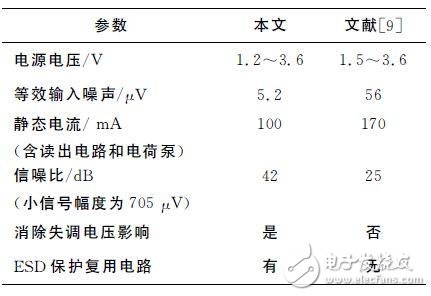
表2讀出電路性能比較
5結論
設計了一種新穎的電容式MEMS麥克風讀出電路,該電路包含低極點頻率的高通濾波器和低噪聲的單位增益緩沖器兩個部分。采用二極管連接的MOS管實現了高阻值的輸入電阻,與電容式MEMS麥克風的靜態電容一起組成低極點頻率的高通濾波器,可讀出麥克風在聲壓作用下產生的小信號。另外,采用兩種辦法來提高讀出電路的分辨率:一是運放采用不對稱輸入管來消除失調電壓的影響,二是通過增大輸入管的尺寸等方法來降低運放的輸入噪聲。在讀出電路的設計中,為了降低讀出電路的功耗,使用了工作在亞閾值區的MOS管。
本文提供的讀出電路設計方案具有噪聲小、可以處理的小信號幅度范圍廣、功耗低等特點,可延長電池供電的便攜式設備的待機時間。
TOP2 利用MEMS麥克風陣列定位并識別音頻或語音信源的技術方案
1.前言
自動語音識別、語音模式識別和說話人識別及確認等應用對噪聲十分敏感,信源定位識別是音頻和語音信號捕捉處理應用的一個關鍵的預處理功能。特別是基于微機電系統(MEMS) 的麥克風陣列出現后,麥克風陣列音頻定位方案引起科研企業和開發人員的廣泛關注。
目前業界正在使用MEMS麥克風陣列子系統開發嵌入式音頻定位、自動語音識別和自動說話人識別解決方案,聲音識別定位是我們識別確認他人身份的基本功能,當我們聽到有人講話時,會將頭轉向說話人,查看說話人。
音源定位是自動語音識別和自動說話人識別系統的一個重要環節,對于提高語音識別系統的性能至關重要。麥克風陣列可捕捉從不同方向傳來的聲音,通過算法運算使麥克風指向某一個特定方向,放大從該方向捕捉到的音頻信號,同時衰減從其它方向捕捉的音頻信號,整個動作就像一個智能麥克風。
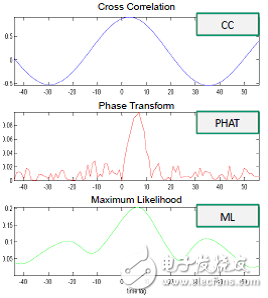
圖 1.綜合利用麥克風音源互相關性(CC)、相變(PHAT)和最大相似性處理(ML)技術的音源定位
2.系統框架
整個系統由以下幾個子系統組成:音源方向測定、數據融合、自動語音識別和自動說話人確認。其中,音頻方向測定子系統基于麥克風陣列,運行三個不同的音頻方向估算算法;數據融合子系統負責推斷方向,自動語音識別子系統利用傳入的音頻信號增強主音源信號強度,衰減主音源周圍的其它音頻信號。最后,自動說話人確認子系統識別某些關鍵詞匯,再利用相關特征與說話人匹配。
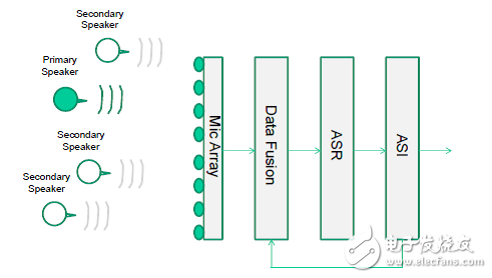
圖 2. 系統框架
如果語音識別任務沒有成功,則反饋給數據融合系統,估算新方向傳入的語音,然后驅動麥克風陣列指向該方向。
2.1 語音識別和說話人識別
語音特征提取(27 LPC-倒普系數)需要確定語音的端點,將語音分成數個短禎(每禎20 ms),通過一個DTW模式對準算法與一組參考語音(模板)匹配。然后,應用歐氏距離測量法進行相似性評估。
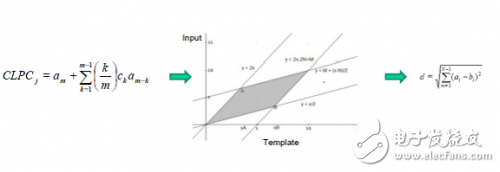
圖 3. 特征提取、模式匹配和評分是說話人語音識別確認任務的主要環節
說話人身份評分采用的是動態時間規整近鄰(DTW-KNN)算法的距離測量方法,即動態時間規整測量算法與近鄰決策算法的合并算法。這個算法需要使用均方根、過零率、自動相關和倒普線性預測系數。使用歐氏距離算法計算成本函數,使用KNN 算法計算最小距離匹配度 k。
3.MEMS麥克風陣列
我們采用STM32F4微控制器和MEMS麥克風開發一個硬件音頻信號同步采集處理子系統,其信號捕捉能力相當于8個采樣率高達48 KHz的麥克風 。
圖 4. 采用STM32F4微控制器和MEMS麥克風的硬件音頻信號同步采集處理子系統
3.1 MEMS技術
MEMS技術的主要特性是在能夠同一芯片表面集成微電子和微機械單元,在同一封裝內整合不同的功能。這樣,過去分別由傳感器、執行器(例如,射流管理或機械交互)和邏輯、控制單元完成的不同功能,今天可以整合在同一個封裝內。從生化分析,到慣性系統,從機械傳感器,到音頻和聲波傳感器, MEMS產品覆蓋很多應用領域。
3.2 MEMS麥克風和音頻編碼
MEMS麥克風尺寸雖然比其它技術麥克風小,但是,從物理和機械角度看,卻具備標準駐極體麥克風的全部功能,其核心部件是一個振膜,振膜和固定框架共同組成一個可變電容器。當聲波引起振膜變形時,電容會發生變化,從而導致電壓變化。
被捕捉到的信號的后期處理,即功率放大和模數轉換過程,都是在同一芯片上完成,因此,麥克風輸出是高頻PDM信號。在脈沖密度調制過程,邏輯1對應一個正 (+A) 脈沖,而邏輯0對應一個負(-A)脈沖。因此,假設輸入一個周期的正弦音頻,當輸入電壓在最大正振幅時,輸出為一個由“1”組成的脈沖序列;當輸入電壓在最大負振幅時,輸出則是一個由“0”組成的序列。當穿過0振幅時,聲波在1和0序列之間快速變化。如果方法正確,PDM可通過數字方法給高品質音頻編碼,而且實現方法簡易,成本低廉。因此,PDM比特流是MEMS麥克風常用的數據輸出格式。
另一方面,PCM是一個非常著名的音頻編碼標準,以相同的間隔對信號振幅定期采樣,在數字步進范圍內,每個采樣被量化至最接近值。決定比特流是否忠實原模擬信號的是PCM比特流的兩個基本屬性:采樣率,即每秒采樣次數;位寬,即每個采樣包含的二進制數個數;通過降低采樣率(降低十分之一)和提高字長,可以將PDM編碼信號轉成PCM信號,PDM數據速率與降低十分之一的PCM采樣率的比值被稱為降采樣率。因此,對于N:1降采樣率,只要每N個間隔采樣一次 (不考慮剩余的N-1),即可完成降低十分之一的采樣過程。
3.3 麥克風陣列
從硬件角度看,這款產品基于STM32F407VGT6高性能微控制器,能夠通過8個MEMS麥克風采集信號。STM32F4微控制器基于工作頻率最高 168 MHz的高性能ARM? Cortex-M4 32 RISC處理器內核,集成高速嵌入式存儲器(閃存容量最高1 MB, SRAM容量最高192KB)以及標準和先進的通信接口,例如,I2S全雙工接口、SPI、 USB FS/HS和以太網。
STM32 F4系列是意法半導體首批基于支持FPv4-SP 浮點擴展運算的ARM Cortex-M4F內核的STM32微控制器,這使得該器件適用于重負荷算法,浮點單元完全支持單精度加法、減法、乘法、除法和累加以及均方根運算,還提供定點和浮點數據格式轉換和浮點常數指令,完全兼容ANSI/IEEE Std 754-1985二進制浮點算術標準。為提高ARM架構的數字信號處理和多媒體應用性能,指令集還增加了DSP指令集。新指令是數字信號處理架構常用指令,包括帶符號乘加變化(variations on signed multiply–accumulate)、飽和加減和前導零計數。
麥克風陣列通過RJ45以太風接口或USB OTG FS接口連接其它器件,與其它器件交互是通過可控制基本板設置的DIP開關實現。
如下圖所示,每個MEMS麥克風都是由同一個時鐘源觸發,時鐘源由專用振蕩器驅動,對每個GPIO端口的一個引腳輸出1位PDM 高頻信號。輸出PDM數據頻率與輸入時鐘同步,因此,DMA控制器以同一頻率即音頻捕捉頻率對GPIO端口進行讀操作,然后將1 ms音頻數據(每次)保存在存儲器緩沖電路。這時,該緩沖器包含麥克風交叉信號,然后軟件利用優化的快速解碼函數對數據進行解復用處理。最后,PDM 數據通過數字信號處理環節,再進行PDM轉PCM處理。
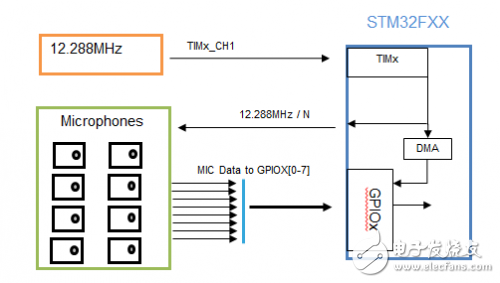
圖 5.每個MEMS麥克風都是由同一個時鐘源觸發,時鐘源由專用振蕩器驅動,對每個GPIO端口的一個引腳輸出1位PDM 高頻信號
麥克風傳來的PDM信號經過過濾和十分之一降采樣率處理,以取得所需頻率和分辨率的信號。麥克風輸出的PDM數據頻率(麥克風的輸入時鐘)必須是系統最終音頻輸出的倍數,濾波器管道輸出是一個16位值,我們將 [-32768, 32767]視為一個單位增益(0 dB)的輸出范圍。
原先濾波管道產生的數字音頻信號在信號調理前被進一步處理。管道第一級是一個高通濾波器,主要用于除掉信號DC失調。為保護信號質量,該濾波級是使用一個截止頻率不在可聽頻率范圍內的 IIR濾波器,管道第二級是一個基于IIR濾波器的低通濾波器。兩個濾波器有啟用和禁用以及配置功能;可通過外部整數變量控制增益。
如上文所述,數據采集有兩個比特流解決方案,通過DP開關選擇使用哪一個方案。當選用 USB且在主機USB插入麥克風陣列時,主機將STM32_MEMS_Microphones視為一個標準的USB音頻設備。因此,主機系統無需安裝驅動軟件。例如, STM32_MEMS_Microphones可直接連接第三方PC音頻采集軟件。當選用以太網時,STM32_MEMS_Microphones發送 RTP數據包。在網絡服務器的以太網設置頁對目的地IP、設備單播地址和采集參數進行配置。
4.結論
音源定位識別是語音識別技術中的一個重要的語音預處理環節,對提高音頻應用和聲控應用性能具有重要意義。音源定位主要用于自動語音識別、音頻模式識別、說話人發現及識別。MEMS技術的問世讓麥克風陣列能夠嵌入在上述應用設計中,執行音頻信號預處理過程,為應用級提供最好的信息。
該嵌入式單個說話人及其語音定位識別方案基于一個集成ARM處理器和一組MEMS麥克風的原型板。初步測試結果證明了這一集成方案的可行性,且系統級模塊可以做語音、音頻識別目標板,滿足人機、人與周圍環境的自然用戶界面的功能要求。
?
TOP3 CMOS電容式微麥克風設計
?
隨著智能手機的興起,對于聲音品質和輕薄短小的需求越來越受到大家的重視,近年來廣泛應用的噪聲抑制及回聲消除技術均是為了提高聲音的品質。相比于傳統的駐極體式麥克風(ECM),電容式微機電麥克風采用硅半導體材料制作,這便于集成模擬放大電路及ADC(∑-ΔADC)電路,實現模擬或數字微機電麥克風元件,以及制造微型化元件,非常適合應用于輕薄短小的便攜式裝置。本文將針對CMOS微機電麥克風的設計與制造進行介紹,并比較純MEMS與CMOS工藝微導入麥克風的差異。
電容式微麥克風原理
MEMS微麥克風是一種微型的傳感器。其原理是利用聲音變化產生的壓力梯度使電容式微麥克風的聲學振膜受聲壓干擾而產生形變,進而改變聲學振膜與硅背極板之間的電容值。該電容值的變化由電容電壓轉換電路轉化為電壓值的輸出變化,再經過放大電路將MEMS傳感器產生得到電壓放大輸出,從而將聲壓信號轉化成電壓信號。在此必須采用一個高阻抗的電阻為MEMS傳感器提供一個偏置電壓VPP,借以在MEMS傳感器上產生固定電荷,最后的輸出電壓將與VPP及振膜的形變Δd成正比。振膜的形變與其剛性有關,剛性越低則形變越大;另一方面,輸出電壓與d(氣隙)成反比,因此氣隙越低,則輸出電壓及靈敏度越優,但這都將受限于MEMS傳感器的吸合電壓,也就是受限于MEMS傳感器靜電場的最大極限值(圖1)。
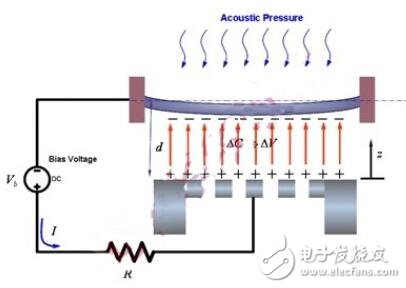
圖1 電容式麥克風原理
CMOS微機電麥克風電路設計
在CMOS微麥克風設計中,電路是一個非常重要的環節,它將影響到微麥克風的操作、感測,以及系統的靈敏度。以圖2為例,駐極式電容微麥克風的感應電荷由駐極體材料本身提供的駐極電荷所產生,而凝縮式電容微麥克風則是采用從CMOS的操作電壓中抽取一個偏置電壓,再通過一個高阻抗電阻提供給微麥克風的聲學振膜來提供固定的電荷源。此時,若聲學振膜受到聲壓驅動而產生位移變化,則電極板(感測端)的電壓將會發生變化。最后,通過電路放大器將信號放大,則可實現模擬麥克風的電路設計;如果再加上一個∑-ΔADC模數轉換電路,便可完成數字麥克風的電路設計(一般數字麥克風的輸出信號為1比特PDM輸出)。
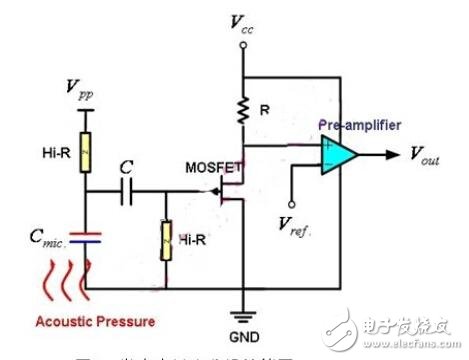
圖2 微麥克風電路設計簡圖
CMOS微機電麥克風工藝分類
從微機電麥克風的制造來看,就目前的技術層面而言,集成CMOS電路的MEMS元件可分為三種。Pre-CMOS MEMS工藝:先制作MEMS結構,再制作CMOS元件;Intra-CMOS MEMS工藝:CMOS與MEMS元件工藝混合制造;Post-CMOS MEMS工藝:先實現CMOS元件,再進行MEMS結構制造。一般而言,前兩種方法無法在傳統的晶圓廠進行,而Post-CMOS MEMS則可以在半導體晶圓代工廠進行生產。
圖3簡述了Post-CMOS MEMS的制造方式。在Post-CMOS MEMS工藝中需特別注意,不能讓額外的熱處理或高溫工藝影響到CMOS組件的物理特性及MEMS的應力狀態,以免影響到振膜的初始應力。鑫創科技公司克服了諸多的技術難題,完全采用標準的CMOS工藝來同時制造電路元件及微機電麥克風結構。在CMOS部分完成后,將芯片的背面研磨至適當厚度以符合封裝要求。最后,利用氫氟酸溶液(HF)去除犧牲氧化物來釋放懸浮結構。此外,在設計中還需考慮可完全去除犧牲材料而又不損害麥克風振膜的蝕刻方法,并應避免麥克風振膜與背電極板之間產生粘黏現象。
圖3 Post-CMOS MEMS微麥克風的基本結構及工藝步驟
粘黏現象:由于麥克風振膜與背電極板之間的距離僅為數微米,在該尺寸下,當表面張力、范德華力、靜電力、離子鍵等作用力大于麥克風振膜的回復力時,麥克風振膜將產生永久形變而附著于背電極板上,從而無法產生振動。通常,微機電懸浮結構粘黏現象的主要成因可以分為兩類:第一類發生在麥克風振膜釋放后,麥克風振膜受到表面張力影響,因而被拉近到與背電極板的距離非常靠近,若此時范德華力或氫鍵力等表面力大于麥克風振膜的回復力,則結構將產生粘黏現象而無法回復;第二類是懸浮結構在使用中受到外力沖擊或是靜電力吸引而落入表面力較回復力大的區域,則也會發生粘黏現象。因此,在結構設計上,必須特別考慮麥克風振膜在釋放后的結構變形問題,并在重要的結構部位予以強化,利用特殊設計來減少粘黏現象的發生。
純MEMS與CMOS工藝的差異
多數企業所開發的MEMS微麥克風主要分為兩種形態:第一種是利用專業的MEMS代工廠制造出MEMS IC,再加上一個ASIC放大器,將MEMS IC及ASIC IC用SIP封裝方式封裝成MEMS麥克風芯片。這一部分在IC封裝過程中必須保護振膜不被破壞,其封裝成本相對較高;另一種是先利用CMOS晶圓廠制造出ASIC部分,再利用后工藝來形成MEMS的結構部分。其MEMS工藝技術目前似乎還無法在標準的CMOS晶圓廠完成,這主要是由于振膜需沉積高分子聚合物材料,而高分子聚合物材料還未用于目前的標準半導體IC工藝。另外,在CMOS工藝完成后,需分別在芯片的正面蝕刻出振膜并在其背面蝕刻出腔體及聲學孔。該步驟通過載體晶圓(Carrier Wafer)來完成,在標準的CMOS鑄造廠目前尚未創建出這樣的環境。
目前,最大的課題是如何突破這兩種形態MEMS麥克風的封裝技術。其專利均由美國的微麥克風企業所掌控,因此,MEMS麥克風市場占有率主要分布在少數企業手上。
鑫創科技采取的方式是在CMOS工藝完成后,從芯片的背面形成腔體和聲學孔作為MEMS結構的釋放。這一部分無需使用特殊的機器和材料,可在現有的 CMOS晶圓廠內完成,因而能夠降低開發成本。另外,鑫創科技的產品可直接利用晶圓級封裝技術將CMOS電路與微麥克風集成在同一塊芯片上,同樣可避免在封裝過程中對振膜產生破壞(圖4)。
圖4 微機麥克風掃描電路
MEMS麥克風目前已經取代ECM麥克風被廣泛應用于手機中(尤其是智能手機),其主要原因是MEMS麥克風具有耐候性佳、尺寸小及易于數字化的優點。 MEMS麥克風采用半導體材質,特性穩定,不會受到環境溫濕度的影響而發生改變,因而可以維持穩定的音質。電子產品組裝在過錫爐時的溫度高達260℃,常會破壞ECM麥克風的振膜而必須返工,這將增加額外的成本。采用MEMS麥克風則不會因為錫爐的高溫而影響到材質,適合于SMT的自動組裝。麥克風信號在數字化后,可以對其進行去噪、聲音集束及回聲消除等信號處理,從而能夠提供優異的通話品質。目前已有多款智能手機采用數字化技術,在功能手機中也有加速采用的跡象。此外,筆記本電腦也是目前使用MEMS麥克風的主流,而機頂盒生產企業同樣在積極嘗試將MEMS麥克風應用于開發聲控型機頂盒。
TOP4 MEMS麥克風的聲學設計
前言
以高性能和小尺寸為特色的MEMS麥克風特別適用于平板電腦、筆記本電腦、智能手機等消費電子產品。不過,這些產品的麥克風聲孔通常隱藏在產品內部,因此,設備廠商必須在外界與麥克風之間設計一個聲音路徑,以便將聲音信號傳送到MEMS麥克風振膜。這條聲音路徑的設計對系統總體性能的影響很大。
下圖是一個典型的平板電腦的麥克風聲音路徑:
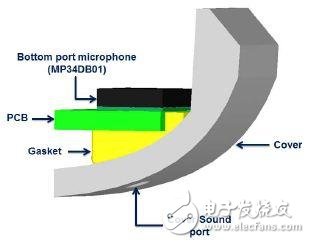
圖1–典型應用示例
外界與麥克風振膜之間的聲音路徑由產品外殼、聲學密封圈、印刷電路板和麥克風組成,這條聲音路徑起到波導作用,構建系統總體頻響。此外,聲音路徑材質的聲阻抗也會影響頻響。若想準確預測聲學設計的性能如何,需要建立聲音路徑模型,使用COMSOL等專業級仿真工具對聲音路徑的頻響特性進行仿真實驗。然而,本文為讀者提供一些優化麥克風聲音路徑的基本原則。
Helmholtz諧振
狹窄的傳聲孔與空心腔室相連構成的結構在受到聲波激勵時會產生聲學諧振。當我們對著空瓶的瓶嘴上方吹氣時,就會發生這種諧振現象。這種結構叫做 Helmholtz諧振器,是以該現象的發明者Hermann von Helmholtz命名的。Helmholtz利用諧振頻率不同的諧振器識別音樂等復雜聲音內的頻率成份。
Helmholtz諧振的中心頻率是由下面的程式確定:

其中c是空氣速度;AH是聲孔的橫截面積;LH是聲孔的長度;VC是空腔的容積。該方程式假設諧振器是一個空腔和一條橫截面均等的管道相連組成的簡單結構。如果麥克風的聲音路徑的橫截面積和材質不同,則描述聲音路徑的聲波特性的方程式要復雜很多。因此,必須對整個聲音路徑進行聲波特性仿真實驗才能精確地預測聲學設計的總體性能。
在本文內,通過改變麥克風密封圈的厚度和內徑、產品外殼聲孔直徑、印刷電路板聲孔直徑、聲音路徑彎折和路徑材質的聲阻抗,我們對不同的聲音路徑進行了頻響仿真實驗。實驗結果讓設計人員能夠預先掌握這些參數變化對聲音路徑總體性能的影響程度。
麥克風的頻響
MEMS麥克風低頻頻響是由以下主要參數決定的:傳感器振膜前側和后側之間通風孔的尺寸;后室的容積。而MEMS麥克風高頻頻響則是由麥克風前室和聲孔產生的Helmholtz諧振決定的。
對于大多數MEMS麥克風,當麥克風的靈敏度降至低頻然后再上升到高頻時,因為Helmholtz諧振的原因,頻響曲線大體相同。但是,不同的MEMS麥克在傳感器設計、封裝尺寸和結構方面差異很大,所以總體頻響特別是高頻頻響的差異很大。意法半導體的多數麥克風將傳感器直接置于聲孔上面,以最大限度地降低前室容積,確保優異的高頻響應。

圖2–意法半導體MP34DT01上置聲孔麥克風及其聲室的X光影像
下面的仿真實驗結果描述了意法半導體MP34DB01 MEMS麥克風本身的頻響,該仿真工具在聲音路徑模型的每個離散點上求解該方程式,在仿真結束后,將在所有有用點采集的數據繪成圖形。
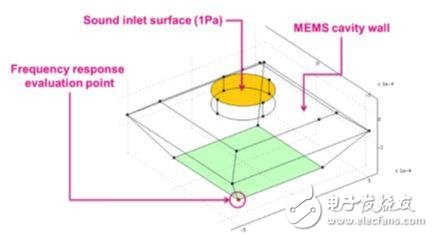
圖3–MP34DB01和MP34DT01 MEMS麥克風的聲室
MP34DB01麥克風仿真結果證明,頻響曲線在高頻部分非常平坦,在20 kHz時,典型靈敏度上升幅度大約+3dB,這是因為Helmholtz諧振的中心頻率很高。該仿真結果非常接近MP34DB01的實際測量頻響。
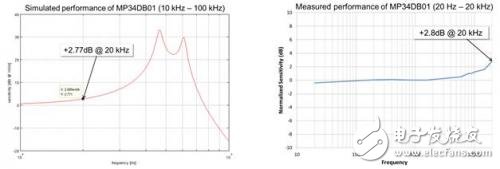
圖4– MP34DB01 MEMS麥克風頻響仿真結果和實際測量結果
密封圈厚度對頻響的影響
麥克風密封圈是在麥克風聲孔與產品外殼聲孔之間起到氣密作用。在安裝一個麥克風密封圈后,聲孔至麥克風前室長度被延長,導致頻響發生變化。下面的仿真實驗是將長度不同但直徑固定(400μm)的圓管置于麥克風聲孔上,評估密封圈厚度對頻響的影響程度。
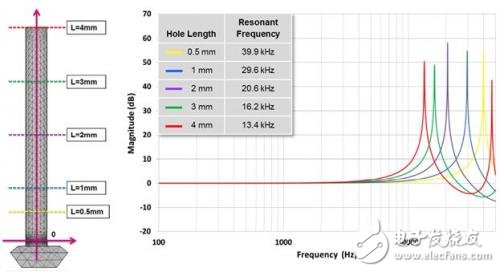
圖5– MP34DT01頻響與密封圈厚度關系
從仿真實驗中不難看出,增加一個密封圈會破壞頻響性能。在增加密封圈(如果是下聲孔麥克風,還要增加一個印刷電路板)后,實際聲孔長度被延長,導致諧振頻率降低,高頻部分的靈敏度提高。更厚的密封圈將會提高諧振器瓶頸長度,導致諧振頻率降低,高頻響應性能變差。
密封圈內徑對頻響的影響
下一個仿真實驗是評估內徑不同但厚度固定(2mm)的密封圈對頻響的影響。圖6所示是使用不同內徑密封圈的仿真實驗結果。
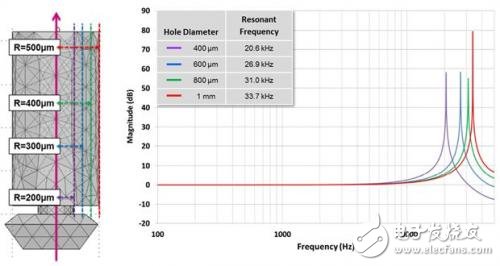
圖6– MP34DT01頻響與密封圈內徑關系
這些仿真數據表明,增加麥克風密封圈內徑可提高諧振頻率,提升總體頻響性能。
聲音路徑形狀對頻響的影響
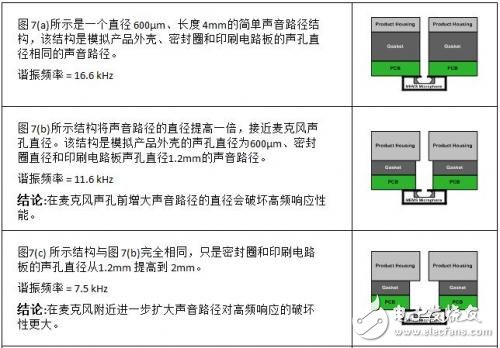
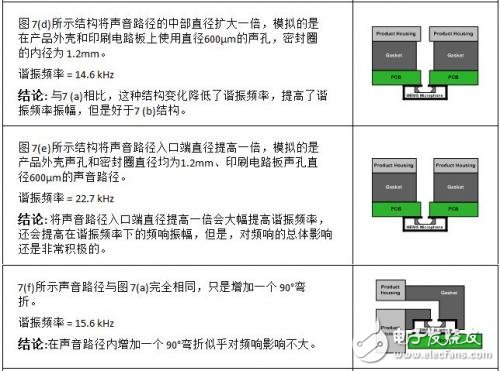
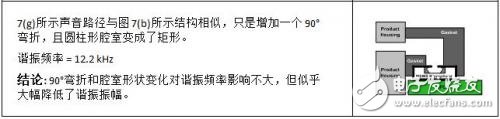
到此,仿真結果符合求解Helmholtz諧振方程式獲得的預測結果。下面的仿真實驗討論聲音路徑形狀變化對頻響的影響,這項預測難度很大。圖7(a)所示結構是一個長4mm、直徑600μm的簡易聲音路徑,其它仿真實驗都以這個簡單結構為基準。為了模擬密封圈、產品外殼聲孔和印刷電路板聲孔的寬度和形狀的變化,仿真實驗增加了長度、半徑和形狀不同的腔體,聲音路徑變得非常復雜。

圖7–聲音路徑形狀變化
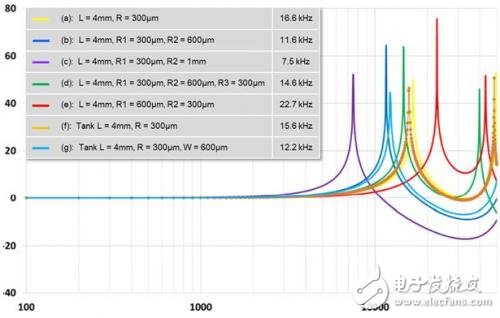
圖8– MP34DB01在不同聲音路徑形狀時的頻響
密封圈材質對頻響的影響
到此為止所做的全部仿真實驗都是集中在聲音路徑形狀對頻響的影響,并在所有路徑表面應用了聲音硬邊界條件。下面的仿真實驗討論密封圈聲阻抗對頻響的影響。如圖9所示,本實驗對聲孔(黃)、傳感器腔體(粉)和傳感器振膜(綠)的表面應用適合的聲阻抗,而藍色表面的聲阻抗是變化的。某一種材質的聲阻抗是指該材質的密度與穿過該材質的聲速的乘積(Z =ρ。c)。密封圈通常由橡膠或其它彈性材料制成,而典型的產品外殼材質通常是塑料、鋁或鋼。
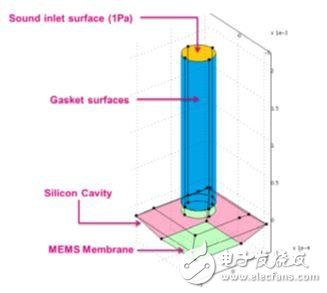
圖9–聲音路徑表面
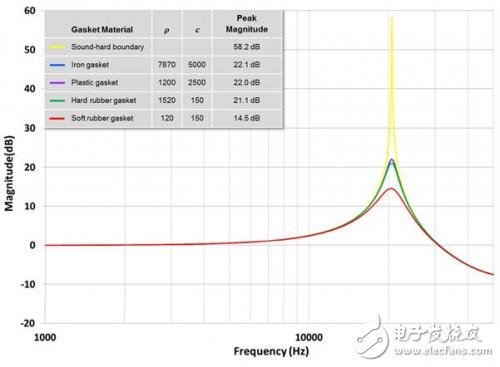
圖10–密封圈材質對諧振峰值振幅的影響
因為諧振頻率是由聲音路徑的形狀決定的,雖然改變密封圈的聲阻抗不會影響諧振頻率,但是會影響諧振Q值。盡管聲音路徑保持連續諧振,但是質地更柔軟的密封圈可減弱諧振,降低其在諧振頻率附近的影響。與采用聲音硬邊界條件的實驗結果相比,采用鐵表面材料的聲孔大幅降低了頻響振幅峰值,這表明,使用聲音硬邊界條件得出的測試結果的嚴峻性不切實際。
案例分析–分析平板電腦下聲孔麥克的整個聲音路徑
圖11所示是一個平板電腦的下聲孔麥克的聲音路徑。在這個示例中,下聲孔麥克裝于印刷電路板上,印刷電路板與產品外殼之間插入一個氣密性軟橡膠密封圈。
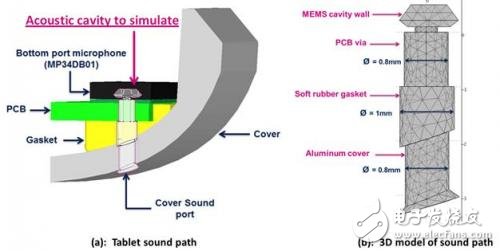
圖11–平板麥克的聲音路徑設計和聲腔3D模型
本仿真實驗對聲音路徑所有組件都設定了適合的聲學特性。圖11(b)所示是11(a)結構的聲音路徑3D模型。本仿真實驗所有材質在消費電子產品中都較為常用:FR4印刷電路板、軟橡膠密封圈、鋁制機身。
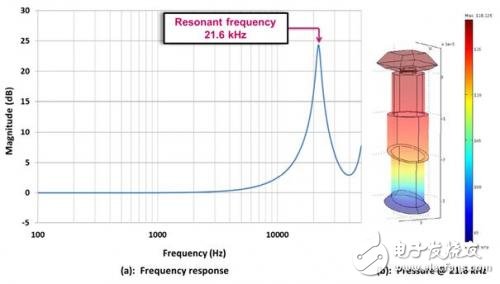
圖12–平板麥克聲音路徑仿真結果
圖12(a)所示是諧振峰值頻率大約21.6 kHz的聲音路徑的頻響曲線,圖12(b)所示是在21.6 kHz諧振頻率下氣壓在聲音路徑內的分布情況。在該諧振頻率下,MEMS振膜承受的氣壓最大。
結論
下面的指導原則有助于麥克風聲音路徑的頻響優化。
●聲音路徑盡量最短、最寬。將聲音路徑外部入口加寬有助于改進頻響,而將聲音路徑的麥克風端加寬,則會降低頻響性能。
●設法不讓聲音路徑內存在任何空腔。假如無法避免,則盡量讓空腔遠離麥克風聲孔。
●聲音路徑彎曲似乎對頻響影響不大。
●質地柔軟的密封圈材料可弱化諧振,提高頻響性能。
TOP5 在雙線式麥克風電路中使用MEMS麥克風
簡介
如今MEMS麥克風正逐漸取代音頻電路中的駐極體電容麥克風(ECM)。ECM和MEMS這兩種麥克風的功能相同,但各自和系統其余部分之間的連接卻不一樣。本應用筆記將會介紹這些區別,并根據一個簡單的基于MEMS麥克風的替換電路提供設計詳情。
音頻電路的ECM連接
ECM有兩根信號引線:輸出和接地。麥克風通過輸出引腳上的直流偏置實現偏置。這種偏置通常通過偏置電阻提供,而且麥克風輸出和前置放大器輸入之間的信號會經過交流耦合。
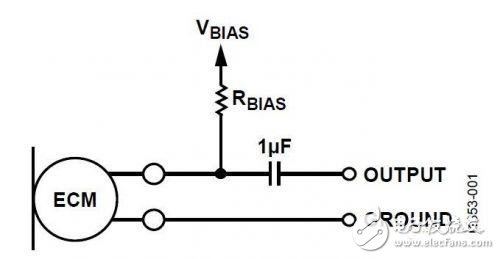
圖1. ECM電路連接
ECM的常見用例是在手機上連接的耳機中用作內聯式語音麥克風。這種情況下,耳機和手機之間的連接器有四個引腳:左側音頻輸出、右側音頻輸出、麥克風信號以及接地。在這種設計中,ECM的輸出信號和直流偏置電壓在同一信號線路中傳輸。偏置電壓源通常約為2.2 V.
MEMS麥克風區別
模擬MEMS麥克風的信號引腳上不使用輸入偏置電壓。但是,它是一種三端器件,有不同的引腳分別用于電源、接地和輸出。VDD引腳的供電電壓一般為1.8 至3.3 V.MEMS麥克風的信號輸出通過直流電壓實現偏置,一般等于或接近0.8 V.在設計中,該輸出信號通常會經過交流耦合。
相對于ECM,使用MEMS麥克風的關鍵優勢在于它的電源抑制(PSR)性能更強。MEMS麥克風的PSR通常至少為70 dBV,ECM卻根本沒有電源抑制能力,因為偏置電壓直接通過電阻連接至麥克風。
用MEMS麥克風取代ECM時需要進行的電路更改
對于原本圍繞ECM設計的系統,改用MEMS麥克風時面臨的基本難題是,電源和麥克風輸出沒有單獨的信號,例如使用耳機式麥克風時。如果對電路進行一些小的更改,就可以在此類設計中使用MEMS麥克風。首先,必須將信號鏈中直流偏置提供的下游信號與麥克風的輸出信號隔離。其次,必須將此直流偏置用于為 MEMS麥克風供電,而且不能讓麥克風的輸出信號干擾電源。直流偏置的隔離可通過交流耦合電容實現,MEMS麥克風的電源可通過仔細設計的電路提供,該電路充當分壓器和低通濾波器。以下設計中使用了ADMP504 MEMS麥克風作為示例。其中用到了一個2.2 k偏置電阻。
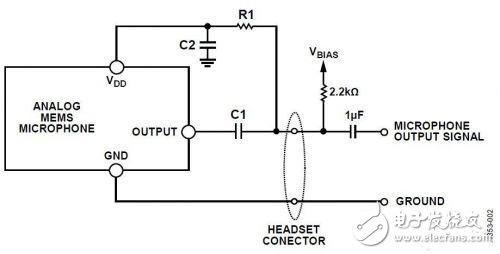
圖2.將一根線用于電源和輸出信號的MEMS麥克風
圖2顯示了一個實現上述功能的設計示例。在耳機的設計中,耳機連接器左側的電路部分將會在實際耳機中,2.2 k偏置電阻和1 F交流耦合電容則在源設備(例如智能手機)中。電阻R1和R偏置形成分壓器,MEMS麥克風將V偏置電壓降至VDD引腳的供電電壓。根據V偏置、R偏置和所需VDD電壓的值,電阻R1可能需要非常小,如下例所示。要計算所需的串聯電阻(R偏置+ R1),可將麥克風建模為一個電阻,將有固定電流從中流過。VDD = 1.8 V時,ADMP504的典型供電電流為180 A.根據歐姆定律,VDD上的電壓為1.8 V時,該麥克風可建模為一個10 k的電阻。要求解合適的電阻R1值,所用的分壓器公式為:
[麥克風VDD]=[偏置電壓]×(10 k /(10 k + R1 + R偏置))
根據此公式可以算出,一個2.2 k的R偏置電阻和一個499的R1電阻會從2.2 V偏置電壓分出1.73 V到麥克風的VDD上。在選擇R1值時,需要進行權衡取舍;如下所示,此值太大會導致VDD過小,但為了防止C2過大,又不能讓此值太小。如今MEMS麥克風正逐漸取代音頻電路中的駐極體電容麥克風(ECM)。ECM和MEMS這兩種麥克風的功能相同,但各自和系統其余部分之間的連接卻不一樣。本應用筆記將會介紹這些區別,并根據一個簡單的基于MEMS麥克風的替換電路提供設計詳情。關鍵詞:MEMSADI
圖3顯示了該分壓器的兩種不同模型。左側,ADMP504麥克風建模為180 A電流源;右側,麥克風則建模為具有1.8 V VDD的10 k電阻。
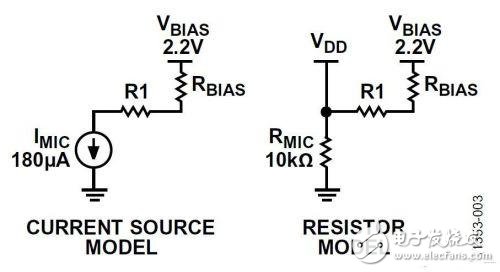
圖3.分壓器模型
電容C2和電阻R1形成低通濾波器,用于對電壓供電信號中輸出的麥克風音頻進行濾波。這種濾波器轉折頻率應該遠低于麥克風本身的濾波器較低轉折頻率。將低通濾波器設計為至少低于麥克風較低轉折頻率的兩個倍頻程,這會是一個好的開端。對于ADMP504,此轉折頻率為100 Hz.10 F的電容和499的R1電阻可實現轉折頻率為31 Hz的濾波器。較大的電容或電阻會進一步降低此轉折頻率,但是該濾波器的電阻大小必須與它對分壓器的貢獻保持平衡,其中,分壓器會向麥克風提供VDD.低通濾波器的?3 dB點的計算公式如下:
f-3 dB = 1/(2π×R1×C2)
其中:
R1為分壓器中的電阻。
C2為低通濾波器電容。
電容C1對麥克風輸出進行交流耦合,這樣它的偏置輸出就會與通過手機提供的麥克風偏置電壓隔離。在給定的VDD條件下,憑借R偏置、R1和麥克風的等效電阻,該電容還會形成高通濾波器。計算高通濾波器轉折頻率時要考慮的總電阻為與R偏置并聯的RMIC和R1的串聯電阻。此電阻的計算公式為
R總=((RMIC + R1)×R偏置)/(RMIC + R1 + R偏置)
對于此處的示例,R總= 1810.高通濾波器轉折頻率為:
f-3 dB = 1/(2π(R總×C1)
要讓濾波器轉折頻率至少低于ADMP504低頻滾降頻率100 Hz一個倍頻程的濾波器轉折頻率為100 Hz,C1至少應該為1.8 F.
圖4顯示了一套完整的耳機電路,其中采用了ADMP504MEMS麥克風以及合適的電阻和電容值,并以我們處理的V偏置和R偏置值為依據。
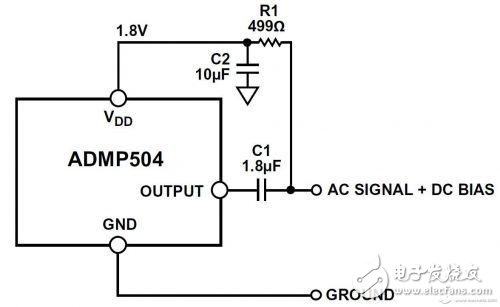
圖4.采用ADMP504 MEMS麥克風的電路
結論
通過本文介紹的電路,可以實現在沒有單獨的電源和麥克風輸出信號的設計中使用MEMS麥克風。該電路只使用兩個電容和一個電阻,即可讓MEMS麥克風用于雙線式麥克風電路中。
TOP6 選擇適合MEMS麥克風前置放大應用的運算放大器
簡介
麥克風前置放大器電路用于放大麥克風的輸出信號來匹配信號鏈路中后續設備的輸入電平。將麥克風信號電平的峰值與ADC的滿量程輸入電壓匹配能夠最大程度地使用ADC的動態范圍,降低后續處理可能帶來的信號噪聲。
單個運算放大器可以簡單地作為MEMS麥克風輸出的前置放大器應用于電路中。MEMS麥克風是一個單端輸出設備,因此單個運算放大器級可用于為麥克風信號增加增益或僅用于緩沖輸出。
該應用筆記包含了設計前置放大器時需要考慮的有關運算放大器規格的關鍵內容,展示了部分基礎電路,還提供了適合用于前置放大器設計中的ADI公司的運算放大器產品表格。此應用筆記采用ADMP504 MEMS麥克風為例,闡述了不同的設計選擇。該麥克風為模擬麥克風,信噪比(SNR)為65dB。采用不同的麥克風設計時,要求可能與該應用筆記中所述不同,需要根據麥克風的噪聲、敏感度、最大聲學輸入和其他規格進行調整。
運算放大器規格
運算放大器有許多不同的規格和性能曲線,因此從中找出與您應用相關的規格可能是件非常繁瑣的任務。對于麥克風前置放大器設計來說,部分規格比其他更重要;該應用筆記簡述了此部分規格。
噪聲
運算放大器的噪聲值分為電壓噪聲和電流噪聲。通常,在前置放大器的設計中您僅需要考慮運算放大器的電壓噪聲。只有在使用高值(即高噪聲)電阻時,設計中才需要考慮電流噪聲。為了將電路的整體噪聲維持在低水平,通常采用低于10 kΩ的電阻。
運算放大器的電壓噪聲采用噪聲密度單位nV/√Hz定義。與電路帶寬相關的器件噪聲,您需要將此噪聲密度乘上帶寬的平方根。請注意該簡易公式僅適用于在頻率范圍內統一的噪聲頻譜,如圖1所示。
對于20kHz的帶寬,該乘數因子為141。舉ADA4075-2為例,其噪聲密度為2.8 nV/√Hz乘以141,因此噪聲電平為0.395μV或-128 dBV。運算放大器的噪聲密度通常在數據手冊的典型特性部分的表格中顯示,且通常顯示其整個頻率范圍內的曲線。該圖表可用于查看在何頻率下運算放大器噪聲將取決于1/f噪聲。對于許多運算放大器來說,這個點通常低于音頻頻帶(20Hz)低端,但是噪聲密度的曲線仍然值得一看,且不能僅參考噪聲密度指數來完全描述噪聲性能。圖1為ADA4075-2數據手冊中的噪聲密度圖實例。請注意圖1中1/f轉折點約為10Hz,遠低于MEMS麥克風前置放大器電路的目標頻帶。
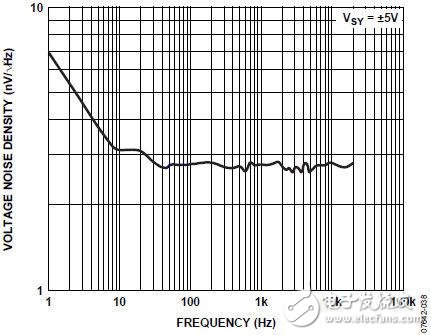
圖1. ADA4075-2電壓噪聲密度
ADMP504模擬MEMS麥克風的SNR(A加權)為65 dB ,敏感度為-38 dBV。因此,在20 kHz帶寬內本底噪聲為-103 dBV。這相當于50 nV/√Hz的噪聲密度,約與150 kΩ電阻的熱噪聲相同。
對于運算放大器來說,比麥克風更加低噪非常重要,因此從噪聲方面考慮,前置放大器電路要盡量的透明性。一個非常好的做法是運算放大器的噪聲比麥克風本身低至少10dB,以將其對于全局噪聲的影響最小化。為了使用ADMP504前置放大器實現該目的,運算放大器的最高本底噪聲為-113 dBV或15.9 nV/√Hz。表1中的大部分運算放大器都遠低于該限值,其中不低于該限值的運算放大器仍被列出因為它們具有其他可能在某些特殊設計中非常重要的參數,例如用于低功耗設計的工作電流。請注意電路的總輸出噪聲電平將受所施加增益和電路中電阻的影響,而不僅僅取決于運算放大器。可以通過選擇足夠小的電阻來使其對總電路噪聲的影響最小。
壓擺率
運算放大器的壓擺率指其輸出電壓從一個電壓值到另一個值的改變(或擺動)速度有多快。該參數的單位通常為V/μs。前置放大器電路必須支持的最高壓擺率為
SR = 2 ×π× fMAX×VP
其中fMAX為前置放大器需要支持的最高頻率(音頻通常為20kHz),VP為運算放大器輸出的峰值電壓電平。如果峰值輸出電壓為+12V (8.5VRMS),則運算放大器的壓擺率最低為1.5V/μs。
事實上,大部分音頻信號在高頻率區不會達到滿程電壓,但是設計前置放大器時還是應該考慮到此種可能性。通常電路設計中壓擺率指數不應該設計過高。在設計中您可以使用一個壓擺率足夠快的運算放大器來處理最高目標頻率,但是無需高出該限值太多。
總諧波失真加噪聲(THD + N)
關于運算放大器電路中總諧波失真加噪聲(THD + N)的討論很容易變成一個復雜的討論。許多原因都可能導致失真,包括壓擺率限制、輸出負載以及運算放大器的內部失真特性。THD通常定義為一個比例,表示為一個百分比或者用dB值表示。該比例為信函諧波失真部分的幅度與輸入基頻幅度的比值,因此數值越小(小百分比值或負dB值)表示其THD + N性能越好。
THD + N參數為指定帶寬噪聲與THD之和。并非所有運算放大器數據手冊的規格表格中都會包含該值,即便沒有改值,通常數據手冊中會包含一張THD(或THD+N)與頻率的曲線圖。圖2顯示了ADA4075-2數據手冊中該值的實例。
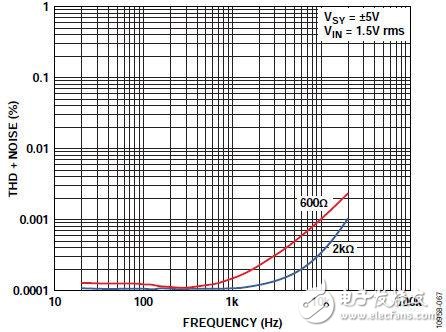
圖2. ADA4075-2 THD + N與頻率的關系
電源電壓
運算放大器的電壓通常表示為一個范圍,例如3V至30V,這標示了V+和V-電壓引腳之間最小值和最大值的區別。運算放大器可以采用單電源將V-接地或者采用雙極性電源將V+和V-分別設置為等值的正負值(例如±15V)。
需要選擇合適的電源電壓以保證運算放大器的輸出不對給定的電源軌削波。有些運算放大器以軌到軌方式工作,這表示輸入或輸出電壓(取決于具體的參數)可以在不削波的情況下可以一直調到軌電壓。如果運算放大器不是軌到軌方式,數據表中將標示最大輸入和輸出電壓;請注意正負電壓最大值可能不同。
信號的峰值輸出電壓顯然與前置放大器電路提供的增益有關。ADMP504的峰值輸出電壓為0.25Vrms。當ADMP504連接至增益為20 dB(10×增益)的前置放大器,其峰值輸出電壓為2.5Vrms,即7.0VP-P。因此,該電路需要至少7.0V電源電壓或±3.5的軌到軌輸出運算放大器。如果運算放大器輸出不是軌到軌,則電源電壓需要更高值。
模擬MEMS麥克風工作電壓為1.5V至3.3V。表1中列出的部分運算放大器最低電源電壓為2.7V,因此在低功耗單電源電路中麥克風的電源電壓VDD必須介于2.7和3.3V之間。
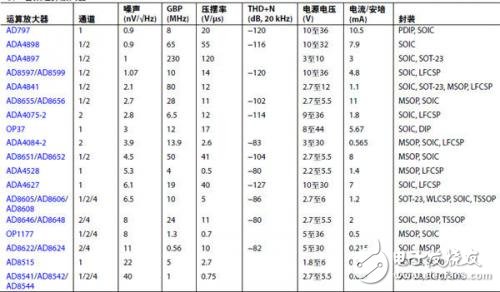
表1. 音頻運算放大器
增益帶寬積
增益帶寬積(GBP)正如其名,是放大器帶寬(采用低通-3 dB轉折)和加于輸入信號上的增益的乘積。大部分針對MEMS麥克風的前置放大器設計不需要附加大于40 dB的增益,即因子為100。設計帶寬至少為50 kHz的前置放大器應該提供部分余量保證運算放大器的帶寬限制不會影響更高的音頻頻率。帶6.5 MHz GBP的運算放大器,例如ADA4075-2,在一個增益為40 dB的電路中將在信號開始滾降之前的通帶最高為65 kHz。
數據手冊中典型性能特性部分繪制的規格曲線為增益與頻率的關系。這張ADA4075-2數據手冊中的圖(見圖3)顯示了運算放大器的開環增益與頻率的關系。
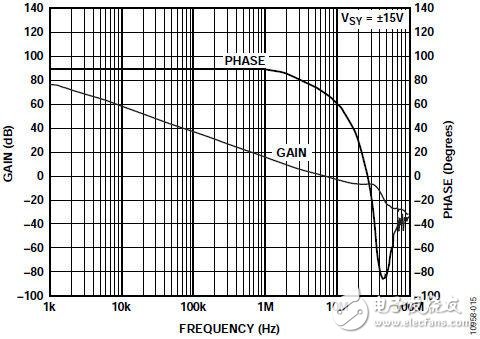
圖3. ADA4075-2開環增益和相位與頻率的關系
其他規格
此外根據電路具體的用處,還需要考慮其他規格。例如,如果前置放大器需要驅動低阻抗負載,例如耳機,您將需要選擇具有高驅動能力的運算放大器。
運算放大器的電源電流通常指放大器的空載電流。低功耗電路設計顯然采用低電源電流的運算放大器最合適。運算放大器的噪聲和電源電流通常成反比,因此需要在音頻性能和功耗之間進行取舍。
最后,也有些其他規格您不需要考慮。失調電壓通常被認為是運算放大器的一個重要規格,但對于ac耦合的前置放大器應用并不重要。
電路
基本的前置放大器電路有兩種設置:反相和同相。該部分描述了這兩種設置的使用和優點。
此類電路不顯示電源或旁通電容。雖然電源盒旁通電路對于電路性能非常重要,但是顯示這兩個規格對于描述前置運算功能并不重要。大部分運算放大器的數據手冊和AN-202應用筆記:IC放大器耦合、接地以及隨機應變中都包含您設計需要的更多有關去耦電容和接地技術的信息。您還可以在運算放大器數據手冊中獲得更多其它更專業的音頻電路。
同相
同相前置放大器電路的輸出和其輸入極性相同。在信號極性需要保持不反相的應用中此類電路非常適合。圖4顯示的配置中同相運算放大器電路的增益為G = (R1 + R2)/R1。
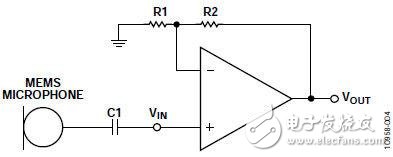
圖4.同相前置放大器電路
該配置具有非常高的輸入阻抗,因為麥克風信號直接與運算放大器的同相輸入直接相連。C1是由于MEMS麥克風輸出偏置在0.8V而采用的一個隔直電容。該電容在該配置中不需要非常大,因為運算放大器的輸入阻抗非常高。
相對于反相拓撲而言,同相拓撲電路更需要考慮共模抑制規格。在同相電路中,共模電壓能導致輸出信號的失真。運算放大器的數據手冊通常會顯示共模抑制比 (CMRR)與頻率的關系供您參考,用于決定音頻頻帶中某個具體器件的性能。這對于反相電路則不是問題,因為反相電路沒有動態共模電壓;兩個輸入都保持為接地或虛擬接地。
反相
圖5顯示了一個反相運算放大器的電路。該電路的輸出極性與輸入反相,增益為G =-R2/R1。

圖5. 反相前置運算電路
反相電路的輸入阻抗等于R1。該電阻成了MEMS麥克風輸出的電壓分壓器,因此需要選擇足夠高的電阻值不加載麥克風的輸出,但也不能太大,為電路增加不必要的噪聲。模擬MEMS麥克風通常具有200Ω的輸出阻抗。如果R1選為2.0 kΩ,則電壓分頻器會將麥克風的輸出信號電平降低9%。
VOUT= (2.0 kΩ + 200Ω)/2.0 kΩ ×VIN= 0.91 ×VIN
直隔電容C1和R1會形成一個高通濾波器,因此C1應選擇足夠大的值以確保該濾波器不會干擾麥克風的輸入信號。ADMP504的低頻轉折點為100 Hz。如果R1再次選擇2.0 kΩ,則2.2μF電容將形成一個頻率為40 Hz的-3 dB高通濾波器,遠低于麥克風的轉折頻率。
選擇至少比麥克風低一個頻程的截止頻率也是一項經驗法則,除非需要實現一項具體的高通特性。
電壓跟隨器
如果反饋環路中沒有使用分壓電路,同相放大器也可用作電壓跟隨器。該電路非常適合在無法直接驅動較長的走線或者電纜時緩沖麥克風的輸出,可能不需要為信號增加額外的增益。
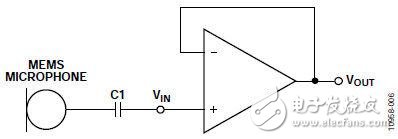
圖6. 電壓跟隨器
電壓跟隨器可在反相極前端用作緩沖器。可能需要改配置以確保能在反相電路中使用更低值的電阻。在無緩沖的情況下,反相極的輸入阻抗可能需要采用更低值以實現目標噪聲性能。在保證緩沖和第一個運算放大器的低輸出阻抗(與MEMS麥克風相比)的情況下,電阻R1和R2能選擇較低值以避免給電路造成額外的噪聲。
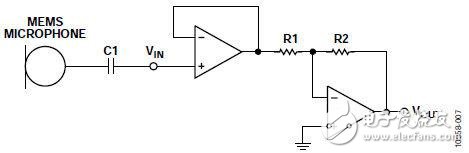
圖7.帶反相放大器的電壓跟隨器緩沖器
差分輸出
MEMS麥克風的單端輸出可用兩個運算放大器和兩個反相電路級(見圖8)以簡單的串聯結合轉換為一個差分信號。每級的輸出轉換為彼此反相,作為差分對。圖 8顯示的電路中信號的放大發生在第一級,由R1和R2設置。電阻R3和R4值應相等,為第二級提供單位增益。為了實現最佳性能,應該采用1%電阻(或更好)來使兩級之間的誤差最小化。
該配置的一個缺點是一個輸出僅由一個放大器產生噪聲和失真,而第二級輸出則有兩個放大器產生噪聲和失真。第二個小問題是每個放大器之間存在一個非零延遲,因此差分輸出的兩側并非完全對齊。然而,這可能對差分信號的性能影響極小。
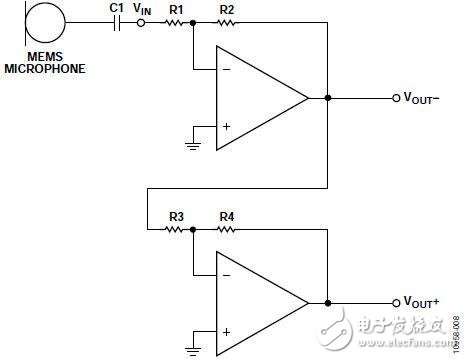
圖8. 差分輸出電路
圖7顯示的電壓跟隨器和反相放大器電路還可用于實現一個增益為1的差分信號。同相輸出可以從電壓跟隨器放大器輸出提取,反相輸出可以從反相放大器的輸出提取。在該配置中,R1和R2的值應保持相同以達到統一的增益。
差分放大器,例如AD8273,也可用于實現單端至差分電路,從前文提到的問題方面考慮也可能具有更出色的性能。
圖9顯示了AD8273配置為單端至差分放大器。每個放大器配置為G=2,因此差分增益為4×。
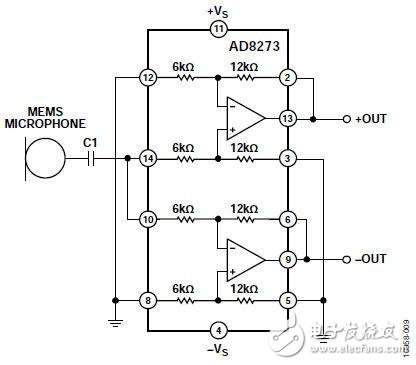
圖9. AD8273單端轉差分配置,G = 4
運算放大器的選擇
ADI提供大量適合麥克風前置放大應用的各種運算放大器產品。圖1顯示了部分此類元件的規格,根據電壓噪聲進行分類。不管您的應用旨在實現最佳性能還是您需要設計一個性價比高的電路,總有一款應用放大器能夠滿足您的需要。
性能仿真
ADI提供了用于仿真模擬電路的工具。NI Multisim器件評估板的ADI版本可用于快速建立一個電路并顯示其性能規格,包括頻率響應和噪聲電平。該Multisim版本包含了大部分該庫中討論的大部分運算放大器,可以無需從不同源下載和管理SPICE模型就實現快速仿真。不同器件,包括運算放大器,可置入電路或取出以比較不同器件的性能。
TOP7 麥克風陣列信號采集系統的設計
作為傳統的語音拾取工具,單個孤立麥克風在噪聲處理、聲源定位和跟蹤,語音提取和分離等方面存在不足,嚴重影響了語音通信質量。如果使用多個麥克風組成陣列,在時頻域的基礎上增加一個空間域,對來自空間不同方向的信號進行實時處理,就可以彌補上述不足。現在已有的麥克風陣列采集處理系統中,大多采用4路麥克風陣列,這類系統雖然在一定程度上能解決語音增強、噪音抑制、聲源定位和回聲抵消等問題,但由于4個麥克風個數較少,只能組成一字線陣,十字陣等幾種特定的陣列形狀,三維空間的方向及距離判斷有較大的誤差。設計的16通道麥克風采集系統能夠組成麥克風面陣,彌補了上述不足,較好地解決了三維空間信號位置判斷的問題。
一、硬件系統設計
該硬件系統主要包括16路麥克風構成的陣列、A/D采樣模塊、DSP數據處理模塊、PC機,如圖1所示。

1.1 麥克風陣列
該系統中,麥克風陣列選用聲望公司的MPA416傳聲器。MPA416傳聲器的靈敏度可達50 mV/Pa;擁有低本底噪聲;頻率響應范圍20 Hz~20 kHz;當其用于陣列時,MPA416的相位差能控制在3°~5°,能滿足系統對精確度和穩定性的要求。
1.2 A/D采樣模塊
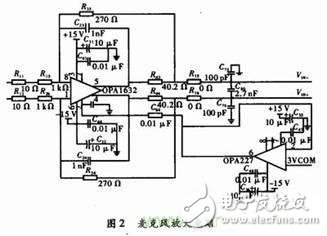
A/D采樣模塊由4片PCM4204以及其外圍電路組成。PCM4204內置了4個同步采樣通道,支持音頻串口和DSD數據口。音頻串口模式時,輸出24 位線性PCM碼,有主、被動兩種工作模式,支持左、右對齊,I2S和TDM數據格式,動態范圍為118 dB,最高采樣頻率216 kHz。系統選用1片PCM4204采用主動工作模式,其余3片PCM4204采用被動工作模式。通過音頻串口將外部采集的模擬聲音信號轉化為24位 I2S格式數字信號。由于前端麥克風陣列的輸出信號不是差分信號,而PCM4204要求輸入信號為差分信號,同時要求輸入差分信號幅值在-0.3~- 0.3+VccV之間,因此其每路信號的前端都應有一個緩沖電路,用來將所接收的麥克風信號轉換為差分信號并對幅值進行調整。緩沖電路主要由 OPA1632和OPA22組成,OPA1632和OPA227是高精度、音頻差分放大器,緩沖電路如圖2所示。
1.3 DSP數據處理模塊
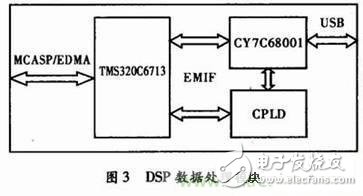
設計中數據處理模塊選擇TI公司浮點DSP芯片TMS320C6713作為模塊核心。TMS320C6713為高性能32位浮點DSP,適用于專業音頻信號處理,其主頻可達300 MHz,處理速度高達2 400 MIPS/1 800 MFLOPS。其內部采用改進的哈佛結構;具有256 kB的片內存儲空間;豐富的外設包括兩個多通道緩沖串口(McBSP)、兩個多通道音頻串口(McASP)、SPI和I2C等;增強的直接存儲器訪問 (EDMA)控制器,可控制16個獨立通道完成不受CPU干預的數據傳輸;32 bit的外部存儲器接口(EMIF),能與SRAM、ERPOM、Flash、SBSRAM和SDRAM無縫連接。DSP數據處理模塊框圖如圖3所示。 其中,TMS320C6713通過McASP與前端的A/D采樣模塊相連,并利用EDMA數據傳輸速度快、傳輸量大,且不占用CPU時鐘周期的特點,將采集數據轉存至TMS320C6713的片內存儲空間。TMS320C6713外接CPLD控制EMIF接口,通過對EMIF接口上CE3空間的控制,控制 USB芯片CY7C680 01,完成TMS320C6713與PC機平臺間的USB數據傳輸。
1.4 A/D采樣模塊與DSP數據處理模塊接口設計
4片PCM4204芯片與TMS320C6713的McASP1相連接,其連接示意圖如圖4所示。
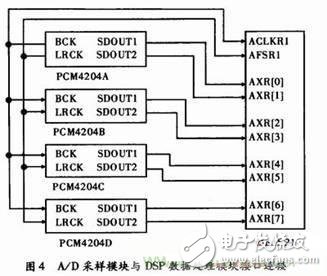
圖4中,PCM4204 A采用主動工作模式,PCM4204B、PCM4204C和PCM4204D采用被動工作模式。系統采用I2S數據格式,PCM4204A的SDOUT1 輸出的是1和2通道的數據,SDOUT2輸出的是3和4通道的數據;PCM4204B的SDOUT1輸出的是5和6通道的數據,SDOUT2輸出的是7和 8通道的數據;PCM4204C的SDOUT1輸出的是9和10通道的數據,SDOUT2輸出的是11和12通道的數據;PCM4204D的SDOUT1 輸出的是13和14通道的數據,SDOUT2輸出的是15和16通道的數據。
通過配置芯片引腳S/M、FMT2、FMT1、FMT0、FS2、FS1和:FS0對PCM4204進行設置。
1.5 DSP數據處理模塊USB接口設計
TMS320C6713通過EMIF的CE3存儲空間可以外擴USB2.0接口,因此在對外擴USB進行讀/寫訪問前,需要通過EMIF的 CE3控制寄存器CE3C-TL來配置CE3空間存儲器接口的類型、存儲器寬度及讀寫時序。CY7C68001采用并行異步存儲器接口通過可編程邏輯芯片 CPLD與TMS320C6713相連,其原理框圖如圖5所示。
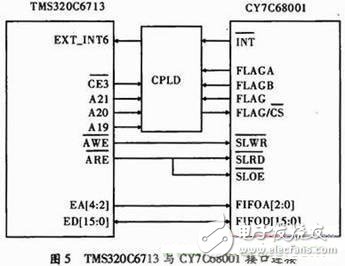
CY7C68001除了存儲器接口外,還有1個中斷信號![]() 和4個狀態信號
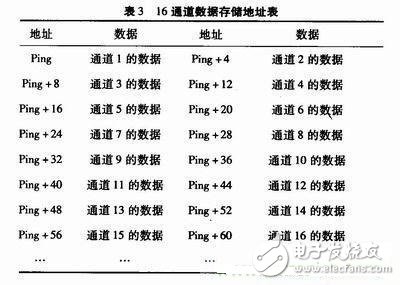
和4個狀態信號![]() 。中斷信號 采用TMS320C6713的外部中斷EXT_INT6。TMS320C6713使用CY7C68001作為從設備。在這種模式下,DSP可以像讀/寫普通FIFO一樣對CY7C68001內部的FIFO進行讀/寫。PC主機發出命令的同時也由CY7C68001 的引腳提供中斷觸發信號給DSP的EXT_INT6。其上升沿被檢測到后,DSP就進入相應中斷服務程序,開始處理USB的傳輸。DSP通過 EA[4:2]連接FIFOA[2:0]對CY7C68001內部FIFO或命令口進行選擇。讀/寫數據通過ED[15:0]與FIFO[15:0]連接進行。FIFO和命令口的選擇和地址分配如表1所示。
。中斷信號 采用TMS320C6713的外部中斷EXT_INT6。TMS320C6713使用CY7C68001作為從設備。在這種模式下,DSP可以像讀/寫普通FIFO一樣對CY7C68001內部的FIFO進行讀/寫。PC主機發出命令的同時也由CY7C68001 的引腳提供中斷觸發信號給DSP的EXT_INT6。其上升沿被檢測到后,DSP就進入相應中斷服務程序,開始處理USB的傳輸。DSP通過 EA[4:2]連接FIFOA[2:0]對CY7C68001內部FIFO或命令口進行選擇。讀/寫數據通過ED[15:0]與FIFO[15:0]連接進行。FIFO和命令口的選擇和地址分配如表1所示。

經實驗驗證,USB異步傳輸速率可達3 Mbit?s-1,滿足系統需求。
1.6 PC機平臺
DSP數據處理模塊通過USB接口與PC機相連,通過CY7C68001芯片,將前端采集的數據傳輸到PC機,方便對數據的進一步處理。
二、 程序設計
2.1 McASP接口程序設計
定義了4個寄存器組:全局寄存器組globalRegs、發送寄存器組xmtRegs、接收寄存器組mvRegs和串行化器控制寄存器組 srctlRegs。通過這4個寄存器組,對McASP1的PFUNC,PDIR,SRCTL,RFMT,AFSRCTL,ACLKRCTL及 AHCLKRCTL等寄存器進行設置。各寄存器組所包含的主要寄存器情況如表2所示。

依據PCM4204的I2S數據格式,將接收幀同步信號的寬度定為32 bit,接收延遲設置為1個delay;AXR[0]~AXR[7]設置為接收模式。
2.2 EDMA傳輸程序設計
為保證數據的完整性,選用Ping-Pong模式對EDMA傳輸進行配置,Ping緩存存放如表3所示,Pong緩存與Ping緩存結構相同。
依據Ping、Pong緩存數據格式,對EDMA接收進行配置,即對:EDMA的opt,src,cnt,dst,idx,及rld寄存器分別進行設置。通過opt寄存器設置數據長度為32 bit,源數據和目的數據為一維方式,源地址固定,目的地址采用索引,啟用幀同步等。源地址和目的地址分別寫入src,dst寄存器。cnt寄存器主要用于配置幀計數和單元計數。由于采用I2S的數據格式,所以1幀數據只包含2個單元數據。通過配置idex及rld寄存器,目的數據可以按照設定的索引方式存儲。
2.3 DSP端OSB接口程序設計
首先,通過調用用戶的初始化函數,使能外部中斷并初始化USB寄存器。之后,程序通過數據傳輸函數,完成DSP與PC機的數據傳輸。
USB初始化程序配置如下:
(1)使能外部中斷6(EXT_INT6)。
(2)加載USB描述表,并進行自舉檢測,如自舉不成功,則重新自舉,直到端點0收到設置包為止。
(3)配置USB為異步從FIFO(Asynchronous SlaveFIFO)模式,采用內部48 MHz時鐘源。
(4)讀取FNADDR寄存器,判斷USB工作狀態。
(5)依據USB工作狀態,配置EP2、EP4、EP6、EP8,并設置一次傳送的Byte長度。設置EP2、EP4為BULK OUT,EP6、EP8為BULK IN,其緩沖大小分別為2×512 Byte。
在數據傳輸過程中,PC端通過EP2向DSP發送讀數據命令,DSP通過外部中斷收到讀命令后,使用EP6發送已采集好的數據。在聲音數據采集系統中,每路麥克風以96 kHz進行24位采樣,按照ping-pong方式進行存儲。在傳輸過程中還需進行判斷,當采集數據存儲在ping緩存時,發送pong緩存中的數據,當采集數據存儲在pong緩存時,發送ping緩存的數據。由于TMS320C6713通過EMIF的CE3存儲空間可以外擴USB2.0接口,需對 EMIF接口的CE3寄存器進行配置,將USB接口設為16位異步存儲接口,設定讀/寫的建立時間(Setup)、促發時間(Strobe)、保持時間,使其滿足CY7C68001的讀/寫時序要求。
2.4 PC機平臺應用程序設計
PC端接口程序采用VC++6.0編寫,首先調用OpenDriver()打開USB接口設備,獲得設備的句柄hDevice,之后調用 Sx2SendVendorReq()函數向外設發出命令,讀取USB配置,最后調用Sx2BulkdataTrans()進行數據傳輸,通過調用 CFile類將接收到的數據存放在文本文件中。程序使用多線程技術,使得應用程序將USB數據傳輸在后臺進行處理,應用程序前臺還可進行其他操作。
TOP8 利用麥克風數組抑制背景噪聲
?
概述
隨著手持語音通信設備越來越流行,它們應用在嘈吵環境的機會也越來越高,例如機場、交通繁忙的路段、人多嘈雜的酒吧等。在這種嘈吵的環境下,通話的雙方實在難以聽清對方所說的話。
此外,不少通信系統都是采用計算機運行的語音識別、指令及/或響應系統,這些系統均易受到背景噪聲的影響,假如噪聲過大,便會導致系統出現很大的偏差。因此,有必要改善語音信號對背景聲音噪聲的比率。
本文將解釋利用麥克風數組消除語音通信系統中背景噪聲的基本原理,并引用美國國家半導體的LMV1088麥克風數組放大器作為例子加以說明。
麥克風數組
麥克風數組是指將多個麥克風一個接一個地排列成一個特別的樣式,讓它們一起工作以產生出一個合成輸出信號或多組信號。
每一個麥克風都是一個傳感器或一個空間窗口(spatial window),用于接收(空間采樣)輸入信號。數組的整體響應是數組中每個麥克風的個別響應的迭加,并與所采用的算法相關。
數組中多組麥克風信號所采用的 “數組處理” 算法是根據幾個因素來決定的,包括麥克風的間隔距離及排列樣式、麥克風的數量及類型,以及聲音的傳播原則。
麥克風數組的基本任務是消除語音輸入信號的周圍噪聲,進而改善聽覺輔助系統、語音識別設備和電信產品的語音質量。此外,麥克風數組也可用于方向定位,以及計算聲源與數組之間的距離。
語音通信系統中的麥克風數組的主要功能是提供一個高質量的語音信號,同時降低現場及周圍環境的噪聲。這里所指的質量是指最終的語音信號非常自然真實,當中不存在任何的人工噪音例如是卡嗒聲和砰啪聲、非意愿靜音、頻率失真、回聲或因加強語音信號處理方法所引起的不定期信號電平變化。
基于上述的理由,信/噪比改進(SNRI)并不是選擇背景噪聲抑制解決方案時的唯一參數,而必須考慮其它問題。
聲音信息
聲壓級
聲壓級(SPL)會隨著聲源距離的增加而減少。圖1和圖2分別表示出SPL的消減,該數值以分貝(dB)作單位,并且是聲源距離 “x”的一個函數。當人們說話的時候,一般以距離嘴唇約1cm的位置作為基準參考點,并將該位置的SPL定為96 dB。在這條件下,SPL的公式應為:
dB=96-20 log(x/0.01)
或可寫成
dB=96+20 log(0.01/x)
公式中的 ( 或 )是0.01m的參考值距離,亦即以米作單位時相對于聲源的距離“x” 為1公分。
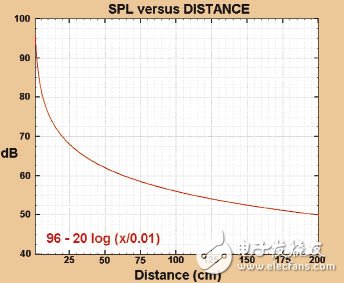
圖1
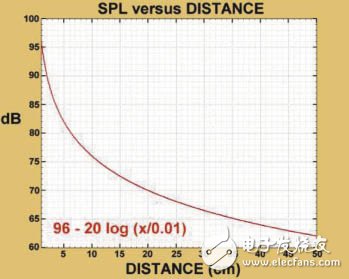
圖2
當距離“x” 增加一倍時,兩條曲線的SPL均下降6dB 。圖1距離聲源200公分,而圖2則是距離聲源50公分的局部放大圖,從圖中可見聲音壓力會因與聲源距離的增加而急速下降,即使距離很短的情況下也一樣。例如,當與聲源的距離為10公分時,SPL便減少了20 dB,即由96dB下降到約76dB。
近場對遠場聲音
聲源的近場是指該位置處于相關最低頻信號的一個波長范圍之內。假設相關語音的最低頻為300Hz,如此波長λ便等于c/f 或 331.1/300 ,又或是 1.104 米,其中c代表聲波于零度攝氏下的水平速度。當頻率為3500Hz時,λ便等于c/f或 331.1/3500,又或是 0.0946米 (9.46公分)。因此,語音信號的典型近場范圍即由聲源距離約9.5公分到1.1米。
超過1米的距離,語音信號便會被考慮成語音聲源的遠場。對于麥克風間隔較近的數組,近場聲源會呈現出一個圓球狀的波陣面,并擁有很強的信號振幅、壓力梯度,以及對應數組中各麥克風與聲源之間的距離而出現的頻率相關差別。
現在假設兩個麥克風的間隔距離為3公分,而最接近聲源的一個麥克風,其與聲源的距離為5公分。圖2表示出第一個麥克風(即最接近聲源的一個),其感受到一個SPL為82dB的音頻信號,而第二個麥克風(即與聲源相距8公分)所感受到的信號為78dB SPL。即使兩者間只有4 dB的差別,但相對于整體的信號級,這差別仍相當大。
從頻譜含量的角度看,麥克風數組內的所有近場語音信號均關系密切。與最接近聲源的麥克風比較,與聲源距離最遠的麥克風信號的振幅將會減少,并且會出現信號由最近麥克風傳送到最遠麥克風的時間延遲。然而,要恢復該個案中的語音信號并不困難。
在麥克風數組語音近場范圍以外的聲源將被看作是遠場聲源,并對數組中排列緊密的麥克風展現出實質平面的波陣面。數組中每一個麥克風均感受到幾乎一樣的聲波能量及隨機相位信號,但該些信號并沒有對應關系,除非麥克風之間的距離非常接近。假如這些信號與麥克風的距離較遠,那麥克風的絕對SPL值便會進一步下降。
現舉出另一個例子,假若將相同的麥克風數組放置到與聲源距離150公分(即1.5米)的位置,最近聲源的麥克風的SPL值便會下降到52.5 dB,而距離聲源153公分的最遠麥克風的SPL值則稍微下降到52.3dB。雖然兩者僅有0.2dB的差距,但從聲源到最近麥克風的整體信號級將出現 30dB的下降。
麥克風輸出之間的不同信號,在進行了適當的處理及濾波后,可將遠場噪聲消除,使兩個麥克風的復合輸出及處理電路能提供高清晰度的語音信號。
聲音噪聲的特質
這里的噪聲場可分為三種,分別是相干噪聲、非相干噪聲及擴散噪聲。
相干噪聲是指當聲波傳到麥克風時,在該過程中沒有因環境中的障礙物而出現任何形式的反射、散射或衰減。
非相干噪聲是指某一位置的噪聲與其它位置的噪聲沒有任何關系,并且被看成空間白噪音。
擴散噪聲是指擁有相同能量的噪聲同時軸射到所有方向。例子包括辦公室內的噪音、機場候機樓及交通噪音等,換句話說就是指所有充滿噪音的環境。
這里所指的聲音噪聲有兩種,分別是穩態噪聲及非穩態噪聲。
穩態噪聲是指噪聲的能量相對地穩定,并具備已知及變化緩慢的頻譜含量,并且是可預知的。例子包括由引擎發出的噪音、空調風扇、隨機或 “白” 噪音等等。噪聲抑制算法能有效抑制這類噪音。
非穩態噪聲是指音量及聲音內容會在短時間內變化,例如高聲說話或叫喊、汽車經過的聲音或拍手等,其發生是不可預知的。假若出現這類噪音,它們可能在被辨識及抑制前便會自動地消失掉,非穩態噪聲一般都包含在穩態噪聲之內。
最麻煩的情況是當噪聲源與語音信號擁有相同的出現時間、頻譜及相干特性,這種情況當背景噪聲屬于非穩態,且旁邊有其它人說話時便會出現,如在餐館和酒吧,車站及派對上等。
第二部分
麥克風數組的解決方案
根據選用的方法,麥克風數組解決方案可以成為抑制穩態及非穩態噪聲的一項非常高效的技術。
配合適當的算法,數組中的個別麥克風信號經過濾波后再組合,以便達到波束成形或空間濾波的效果,進而產生一個復雜的麥克風數組極性響應模式,能夠指向或遠離某個聲音位置。因此,可以將某個位置的聲音隔離或加強,又或可將其抑制或拒絕。同樣地,麥克風聲道中的信號相關性可找出主要信號的方向及其正確位置。
視乎數組的復雜度及應用,該數組可經由一個配備了數字信號處理器的模擬電路,再加上適當的計算機軟件和一系列方法去控制。
波束成形
波束成形分為兩種技術:自適應及定向。
在自適應波束成形技術中,可通過數據相關濾波及改變對數據的時間響應去調節波束的方向,在自適應波束成形方面已有幾種方法被開發出來。雖然在信號的處理上比較繁復,但好處是設計靈活度更高,包括麥克風的數量、類型及間隔距離。自適應波束成形一般需要數字信號處理器或計算機軟件來實現。
至于定向波束成形方面,波束的行走方向會按照相關聲源的方位而優化,并且同時排除來自其它方向的噪聲。一般來說,排列緊密兼具備固有方向性的差分式麥克風端射數組都是依靠固定時間延遲或其它方法來改變波束的方向。對于這類應用,任何濾波及信號處理的方法均須對特別的機械設計加以優化。定向波束成形一般需要模擬電路、數字信號處理器或計算機軟件來實現。
對于語音應用來說,采用定向波束成形解決方案會比較好,尤其當應用牽涉到語音辨識。假如以模擬電路來實現,它們便應該:
● 對噪聲輸入有實時的響應
● 容易實現而且無需開發任何的算法程序
● 為抑制穩態及非穩態噪聲提供一個可接受的信/噪比改進(SNRI)值
● 在無語音時表現極低的失真,并且可改善語音質量測試(ITU-T P.835)的整體平均意見分數(mean opinion score)
● 運算復雜度低并具備低信號延遲
● 功耗比其它解決方案小
與定向方案比較,采用數字信號處理器或軟件實現的自適應波束成形的缺點為:
● 當實施及調節抑制算法時,需要時間去重復辨識及收斂噪聲
● 雖然可提供較佳的SNRI值,但通常也會為語音輸出信號帶來較多的問題,包括因噪聲收斂時間所引起的延遲、卡嗒聲和砰啪聲、非意愿靜音、頻率失真、回聲或與子頻帶頻率信號處理方法有關的不定期信號級變化
● 由于需要另行開發演算程序,因此在實現上比較困難
● 需要更大的功耗
所有波束成形解決方案都是采用很小的數組,它們對誤差都非常敏感,包括由麥克風增益與相位失配所引起的誤差,以及由于音頻信號路徑嵌入于產品內而非設于大氣中所導致的路徑偏差。因此,波束解決方案必須具備某種形式的補償,而這種補償可以設于波束成形系統之內,又或是在系統之外加設適合的麥克風和音頻信號路徑。
麥克風間隔
奈奎斯特空間采樣率為相關最高頻率的二分之一個波長(d=λ/2)。為了從空間取得相關頻率的一個波長樣品,兩個傳感器(即麥克風)必須相隔二分之一個波長。
然而,當傳感器的間隔少于二分之一個波長時(d 《 1/2λ),過采樣便會發生,使波長被采樣超過兩次。相反地,如距離大于二分之一個波長(d 》 1/2λ),空間性欠采樣便會發生,這時第一個傳感器在完成一個波長的采樣后,會在第二個傳感器進行采樣之前再重新啟動。空間性欠采樣可將較高頻的信號混迭到相關的頻帶,導致結果出現混亂。為了防止出現假頻,采樣器的頻寬必須限制在最高相關頻率以上。
不少研究指出假如能夠盡量縮少傳感器之間的距離便可打造出高效的麥克風數組,距離可以比奈奎斯特速率的最低要求小很多。現再舉一個例子,其中傳感器的間隔為相關聲波的八分之一個波長。
在一個純語音系統中,頻率范圍為300Hz 到 3500Hz,而最大聲音能量可出現在500Hz 到 2500Hz之間。在此條件下,λ/8的間隔在3500Hz下為1.18公分,而于2500Hz下為1.65公分。
由于波長增加,在3500Hz 及2500Hz頻率以下的音頻信號仍然會被過采樣,因此1.18公分或1.65公分的間隔能有效地取得更多的信號樣品。
另一個計算方法將間隔定為兩公分,如此當頻率為2500Hz時,波長的間隔(λ)/(c/df)便為:
λ/(331.1/0.02*2500)=λ/6.62
假如空間采樣率在最高相關頻率下仍然低于λ/2,則需要調節麥克風的間隔以滿足產品的應用要求。但隨著間隔越來越擠(空間采樣率越來越高),麥克風數組中的遠場信號之間的相干性變大,使得數組在各頻率下均可發揮更佳的整體背景噪聲抑制效能。相反地,假如間隔變得較寬闊,數組的整體抑制能力便會下降,變得難以對較低頻信號作出反應。
一旦決定了傳感器的間隔,便可對應頻率的需求將數組優化。假如采用的是定向波束成形方案,數組的響應模式也需同時被固定。
不論是任何的產品,在設計的過程中必須要作出一些折衷決定,包括在操作頻率范圍與所需噪聲抑制級之間、理論與實際麥克風間隔之間、以及整體的數組系統成本和復雜性之間等。
麥克風數組解決方案的例子
以下采用美國國家半導體的遠場抑制麥克風數組放大器LMV1088作為麥克風數組解決方案的一個例子,它可為語音應用提供高至20 dB的背景噪聲抑制。LMV1088是一個模擬定向波束成形解決方案,適用于采用全指向性麥克風的差分式雙麥克風端射數組。
圖中兩個麥克風分別位于兩條相距約1.5公分至2.5公分的線上,或保持等同的聲波路徑距離。說話者與手機或耳機的麥克風距離最好保持2公分至10公分,通過使用圖1和圖2便可計算出語音信號隨距離變化的損耗。
LMV1088不僅可為兩條聲道上的聲音、麥克風和放大器信號路徑之間的差別提供初始性補償,并且可執行修正濾波令語音輸出更加自然,還可提供頻寬限制濾波功能。
由于內部放大器增益可通過I2C指令調節,因此可使用不同靈敏度的麥克風,并促使LMV1088的輸出信號級能配合模擬輸入信道信號的要求,以針對各式各樣的通信處理器及設備。
LMV1088可支持四種運作模式,并通過I2C命令選擇:
● 預設模式 – 同時使用兩個麥克風進行噪聲抑制
● 獨立模式 – 獨立地使用麥克風1或2(無噪聲抑制)
● 總合模式 – 兩個麥克風的輸出被相加在一起,使麥克風信號得到6dB增益 (無噪聲抑制)
LMV1088的模擬特性可提供一些傳統DSP解決方案沒有的特質:
● 無需因遷就背景噪聲級及其類型而花費額外的時間去進行噪聲收斂運算,進而可為語音信號及背景噪聲提供實時反應,并且可消除令人煩厭的短暫語音消失;
● 由于不采用子頻帶頻率處理算法,因此不會在輸出產生頻率失真、卡嗒聲和砰啪聲或其它的人工假信;
● 可加強現行系統中的單聲道回聲消除處理
不同麥克風數組解決方案的比較和測試
為了準確比較及測量不同背景噪聲抑制方案的效果,所有的測試設置及條件必須一致,以便得到可信的結果。
基于以上理由,特別安排了幾個標準的測試,其中絕大部分采用的是國際電信聯合標準ITU-T Rec. 的P0056e、58e、64e、0830e和ITU-T P835。
ITU-T P835專門用于主觀性測試,能夠有效評估系統中的語音輸出質量包括噪聲抑制的效能。該規格標準清楚說明評估噪聲環境中語音主觀質量的方法,特別適合用來評估噪聲抑制算法。該方法采用獨立的等級標準將測試分為三個獨立部分,分別就單獨的語音信號的主觀質量、單獨的背景噪聲的主觀質量,以及有背景噪聲下的整體語音質量(平均意見分數)進行獨立的評估。
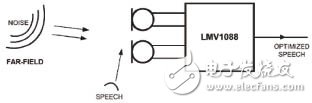
圖3 噪聲、遠場、語音、優化語音
至于IEEE標準方面,可以采用IEEE 1209-1994及IEEE 269_1992兩個標準的測試。前者是專門測量電話手機及耳機的傳送效果,而后者則針對模擬及數字電話機的傳送效果。兩個標準的文件均已被IEEE 269-2002文件所取代。
將上述的標準綜合在一起后便可實現客觀的數值測量,并且可準確地評估不同背景噪聲抑制解決方案的主觀語音質量和電子語音辨識效果。
一般來說,系統的噪聲抑制數據都是由制造商提供的,它們可能是系統所能達到的最佳水平,但對于某些要求高語音質量的應用而言,這些預設水平可能無法滿足應用需求。
因此,在解決方案數據表上標明噪聲抑制數值是很困難的,甚至有時會產生誤導,除非可以明確地說明所有的測試條件。在此方面,一般的數據表都不會提供很詳細的數據,即使提供了也不切實際,因為很難想象客戶應用的條件與數據表上的測試條件完全吻合。
?
?
?
?










 工商網監
工商網監
評論