TLE4921-5U - Dynamic Differential Hall Effect Sensor IC - Infineon Technologies AG
2022-11-04 17:22:44
最近在做機(jī)車牽引變流器網(wǎng)側(cè)諧波監(jiān)測(cè)的實(shí)驗(yàn),通過LABVIEW編程分析諧波,但是電壓傳感器不知道如何選擇才能使信號(hào)不失真,手頭有高壓差分探頭,想知道是否能用高壓差分探頭代替電壓傳感器與數(shù)據(jù)采集卡連接采集信號(hào),求高人指點(diǎn)
2016-07-07 17:03:12
利用霍爾傳感器構(gòu)建自動(dòng)測(cè)速控制裝置
2017-05-05 09:33:46
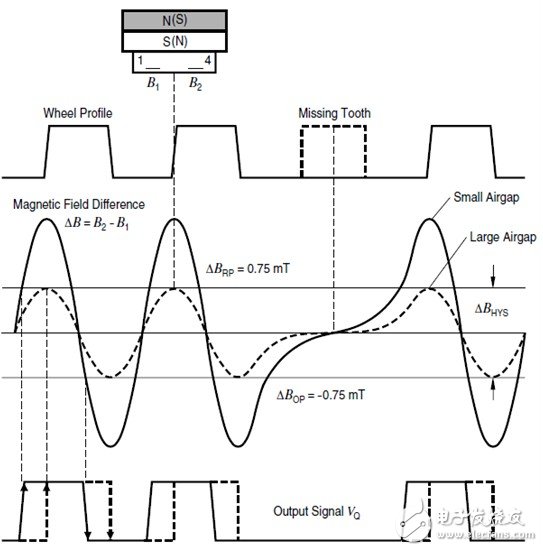
丟失,致使速度脈沖丟失(圖10),導(dǎo)致出現(xiàn)系統(tǒng)錯(cuò)誤或故障。 圖10:跳動(dòng)/擺動(dòng)對(duì)單霍爾效應(yīng)傳感器的影響。 單霍爾效應(yīng)傳感器對(duì)氣隙變化非常敏感。 差分霍爾效應(yīng)傳感器能夠消除偏差,防止基線偏移(圖11
2019-10-08 13:56:28
霍爾傳感器的工作原理是基于霍爾效應(yīng)。霍爾效應(yīng):如圖4.42所示,在半導(dǎo)體薄片上垂直加磁場(chǎng)B,并在半導(dǎo)體的兩端(1,2)通以電流IC,此時(shí)移動(dòng)著的載流子在磁場(chǎng)作用下將受到洛倫茲力fB 的作用。洛倫茲力
2018-01-02 16:28:03
霍爾傳感器,7.4 霍爾傳感器的應(yīng)用7.4.1 霍爾壓力傳感器7.4.2 霍爾加速度傳感器7.4.3 霍爾轉(zhuǎn)速傳感器7.4.4 霍爾計(jì)數(shù)器7.4.5 霍爾無觸點(diǎn)開關(guān)7.5 霍爾傳感器實(shí)際
2021-07-07 07:39:26
如圖4-93所示。 2.霍爾傳感器的工作原理 霍爾傳感器是利用霍爾效應(yīng)工作的傳感器。霍爾效應(yīng)是指置于磁場(chǎng)中的靜止載流導(dǎo)體,當(dāng)電流方向與磁場(chǎng)方向垂直時(shí),在垂直于電流和磁場(chǎng)方向上的兩個(gè)面之間產(chǎn)生電動(dòng)勢(shì)
2017-05-23 09:27:12
霍爾傳感器U18中文數(shù)據(jù)手冊(cè)
2013-04-13 12:25:55
。UGN-3501T(或HP5O3的結(jié)構(gòu)框圖、圖形符號(hào)及外形如圖1所示。3501有兩種后綴,T型厚度為2.03mm,U型為1.54mm。線性霍爾傳感器尺寸小、頻響寬、動(dòng)態(tài)特性好,而且在±0.15T范圍內(nèi)
2018-12-04 15:03:22
霍爾傳感器分類有哪些?原理是什么?
2021-11-26 07:46:03
霍爾傳感器原理錫導(dǎo)電板A、B兩邊接上電源,則會(huì)有電子流過。此時(shí)C、D兩端的電壓差為0當(dāng)外加一個(gè)磁場(chǎng)時(shí),由于洛倫茲力的作用(磁感線穿過左手手心,四指指向正電荷運(yùn)動(dòng)方向,大拇指就是洛倫茲力的方向
2022-03-02 06:04:17
原副邊不失真?zhèn)鬟f,同時(shí)又能實(shí)現(xiàn)主電路回路和電子控制電路的隔離,霍爾傳感器的輸出可直接與單片機(jī)接口。 因此霍爾傳感器已廣泛應(yīng)用于微機(jī)測(cè)控系統(tǒng)及智能儀表中,是替代互感器的新一代產(chǎn)品。在此提出了利用霍爾
2018-11-15 16:23:00
偏離集成片,霍爾電壓消失。這樣,霍爾集成電路的輸出電壓的變化,就能表示出葉輪驅(qū)動(dòng)軸的某一位置,利用這一工作原理,可將霍爾集成電路片用作用點(diǎn)火正時(shí)傳感器。 霍爾效應(yīng)傳感器屬于被動(dòng)型傳感器,它要有外加電源才能工作,這一特點(diǎn)使它能檢測(cè)轉(zhuǎn)速低的運(yùn)轉(zhuǎn)情況。
2020-06-16 09:22:59
)2、膝上型電腦3、數(shù)碼攝像機(jī)4、玩具、游戲機(jī)5、家用電器產(chǎn)品6、流量傳感器7、電動(dòng)車及汽車8、加油機(jī)9、手電筒等 標(biāo)準(zhǔn)電路 SII備有使用CMOS技術(shù)開發(fā)的高靈敏度、低消耗電流的霍爾IC。通過與磁石的組合,可以檢測(cè)到各種機(jī)器設(shè)備的開關(guān)。
2013-08-21 10:53:53
霍爾傳感器輸出的都是脈沖信號(hào),
這里你需要注意的是,你是用的是正交方式的是霍爾傳感器還是 還是單脈沖的霍爾傳感器。
不論你用的是那種,最后都需要將你的脈沖給定時(shí)器,詳情你可以看看硬石開發(fā)板的資料。
2023-10-30 07:40:48
和信息技術(shù)等領(lǐng)域得到廣泛的應(yīng)用。(三)霍爾傳感器由于霍爾元件產(chǎn)生的電勢(shì)差很小,故通常將霍爾元件與放大器電路、溫度補(bǔ)償電路及穩(wěn)壓電源電路等集成在一個(gè)芯片上,稱之為霍爾傳感器。霍爾傳感器也稱為霍爾集成電路
2016-02-01 17:17:58
效應(yīng)比金屬?gòu)?qiáng)得多,利用這現(xiàn)象制成的各種霍爾元件,廣泛地應(yīng)用于工業(yè)自動(dòng)化技術(shù)、檢測(cè)技術(shù)及信息處理等方面。關(guān)鍵詞:傳感器 霍爾傳感器霍爾效應(yīng)的原理 霍爾效應(yīng)是磁電效應(yīng)的一種,這一現(xiàn)象是霍爾
2014-08-06 20:27:56
霍爾傳感器是一種基于霍爾效應(yīng)的器件,它能實(shí)現(xiàn)磁電轉(zhuǎn)換,可用于檢測(cè)磁場(chǎng)及其變化。
2019-08-20 06:21:33
霍爾器件是一種采用半導(dǎo)體材料制成的磁電轉(zhuǎn)換器件,霍爾電流傳感器包括開環(huán)式和閉環(huán)式兩種,高精度的霍爾電流傳感器大多屬于閉環(huán)式,閉環(huán)式霍爾電流傳感器基于磁平衡式霍爾原理,即閉環(huán)原理。今天小編就來為大家介紹一下霍爾電流傳感器工作原理、測(cè)量方法及應(yīng)用。
2020-07-30 06:38:26
(2V),電橋、霍爾傳感器、差動(dòng)放大器、電壓表、振動(dòng)圓盤、環(huán)形砝碼。5、 實(shí)驗(yàn)步驟①按圖(7)接線,開啟電源,調(diào)節(jié)測(cè)微頭和電橋WD,使差放輸出為零。上、下移動(dòng)振動(dòng)臺(tái),使差放正負(fù)電壓輸出對(duì)稱。系統(tǒng)靈敏度
2009-03-17 10:05:55
本帖最后由 eehome 于 2013-1-5 10:01 編輯
霍爾傳感器是根據(jù)霍爾效應(yīng)制作的一種磁場(chǎng)傳感器,它的特性參數(shù)有以下幾個(gè):(1)輸入電阻R霍爾傳感器元件兩激勵(lì)電流端的直流電阻稱為
2012-05-29 10:06:36
霍爾傳感器霍爾式傳感器是利用霍爾效應(yīng)制成的一種磁敏傳感器。自二十世紀(jì)六十年代德國(guó)西門子公司制成第一個(gè)實(shí)用的敏感元件以來,霍爾式傳感器已從一般型發(fā)展成薄膜型、微型、集成、多功能、多用途,并具有高可靠性
2008-06-04 11:12:13
輸入端或輸出端的保護(hù)電路要有足夠的能力來抵抗浪涌電壓或浪涌電流,這會(huì)增加芯片的成本。5、挑選好了合適的霍爾傳感器芯片,廠家還要注意讓操作員工正確焊接,焊接溫度不能太高,時(shí)間不能過長(zhǎng)。霍爾傳感器芯片安裝
2018-09-05 16:29:01
霍爾效應(yīng)為基礎(chǔ)的磁傳感器,已發(fā)展成為種類繁多的磁傳感器系列產(chǎn)品,應(yīng)用十分廣泛。利用它們可以探測(cè)磁場(chǎng)及其變化,并可用于各種磁場(chǎng)相關(guān)的場(chǎng)合。霍爾裝置的工作基礎(chǔ)是霍爾效應(yīng)。霍爾器件有很多優(yōu)點(diǎn),結(jié)構(gòu)牢固,體積小
2021-02-20 14:20:40
霍爾式曲軸位置傳感器是利用霍爾效應(yīng)原理,產(chǎn)生與曲軸轉(zhuǎn)角相對(duì)的電脈沖信號(hào)制成的,它有觸發(fā)葉片式 和觸發(fā)輪齒式兩種曲軸位置傳感器。 霍爾效應(yīng)就是在磁場(chǎng)中,運(yùn)動(dòng)電荷的偏移稱為霍爾效應(yīng),如圖1所示。當(dāng)
2018-10-29 15:06:47
繼電器;11-減速度傳感器圖7 博世輪速傳感器1、6、14、20-傳感器轉(zhuǎn)子;2、7輪速傳感器;3轉(zhuǎn)向節(jié)軸;4轉(zhuǎn)向軸;5懸架構(gòu)件;8軸;9、15-電纜10、16-永磁體;11、17-外殼;12、18-
2018-11-16 11:11:24
霍爾效應(yīng)傳感器的工作原理用于磁場(chǎng)測(cè)量的儀器級(jí)傳感器霍爾效應(yīng)傳感器歷史
2021-03-18 06:17:34
傳感器和電路相連,從而允許設(shè)備以數(shù)位(開/關(guān))模式操作,在這種情況下可以被稱為開關(guān)所以霍爾效應(yīng)傳感器也可稱為霍爾開關(guān)[5]。工業(yè)中常見的設(shè)備,例如氣缸,也被用于日常設(shè)備中;如一些打印機(jī)使用他們來監(jiān)測(cè)缺紙
2014-03-28 16:03:11
霍爾效應(yīng)芯片,每個(gè)通過紅色(北極)段,并通過每個(gè)通過的白色(南極)段停用它,從而產(chǎn)生非常精確的速度信號(hào)。數(shù)字霍爾效應(yīng)傳感器特別適用于汽車安全應(yīng)用,如安全帶扣夾緊檢測(cè)和傳動(dòng)齒輪速度傳感。圖2:霍爾效應(yīng)速度
2018-12-14 15:39:31
霍爾電流傳感器工作原理是什么?霍爾電流傳感器測(cè)量方法是什么?霍爾電流傳感器有哪些應(yīng)用?
2021-06-10 07:30:34
霍爾電流傳感器分交流和直流的,兩線型和多線型。
2020-04-01 09:02:27
什么是霍爾傳感器?霍爾效應(yīng)又是什么?霍爾電流傳感器分為哪幾種?霍爾電流傳感器的主要特性參數(shù)有哪些?
2021-08-20 06:06:01
,同樣,本電流表也可用于交流電流的測(cè)量,將DVM換成交流電壓表即可,十分方便。3開關(guān)型霍爾傳感器的原理及應(yīng)用 開關(guān)型霍爾傳感器可分為單穩(wěn)態(tài)和雙穩(wěn)態(tài),內(nèi)部均有5個(gè)部分,即由穩(wěn)壓源、霍爾電勢(shì)發(fā)生器
2018-10-26 16:55:18
霍爾式轉(zhuǎn)速傳感器是利用霍爾效應(yīng)的原理制成的。霍爾效應(yīng)是指在一個(gè)矩形半導(dǎo)體薄片上有一電流通過,此時(shí)如有一磁場(chǎng)也作用于該半導(dǎo)體材料上,則在垂直于電流方向的半導(dǎo)體兩端,會(huì)產(chǎn)生一個(gè)很小的電壓,該電壓就稱為霍爾電壓。
2019-10-15 09:00:07
MH248霍爾效應(yīng)傳感器產(chǎn)品特點(diǎn)及其優(yōu)點(diǎn)MH248霍爾效應(yīng)傳感器的應(yīng)用
2020-12-28 06:53:32
如何去編寫PMSM有霍爾傳感器的程序?如何去編寫PMSM無霍爾傳感器的程序?PMSM有霍爾傳感器與PMSM無霍爾傳感器的程序有何區(qū)別?
2021-08-06 09:14:14
哪位大神幫忙看看,霍爾S41傳感器,測(cè)試電機(jī)速度送入DSP的電路這樣搭可以嗎
2018-03-14 15:37:56
本帖最后由 松山歸人 于 2021-5-12 10:40 編輯
講解人:趙云老師(張飛電子學(xué)院高級(jí)工程師)霍爾傳感器是一種磁傳感器。用它可以檢測(cè)磁場(chǎng)及其變化,可在各種與磁場(chǎng)有關(guān)的場(chǎng)合中使
2021-05-12 10:39:18
移動(dòng)。這個(gè)力是載流子速度和磁場(chǎng)強(qiáng)度的一個(gè)系數(shù)。最終在寬度為 w 的材料的觸點(diǎn) VH(+)和 VH(-)之間測(cè)到的霍爾電壓正比于磁場(chǎng)的通量密度。儀器配置霍爾效應(yīng)傳感器的支持設(shè)備包括用于提供電流 Ic
2020-05-09 14:30:55
,帶有兩個(gè)等距的磁鐵,傳感器上的電壓在一個(gè)周期內(nèi)將兩次達(dá)到峰值。通常被用于計(jì)量車輪和軸的速度,例如在內(nèi)燃機(jī)點(diǎn)火定時(shí)(正時(shí))或轉(zhuǎn)速表上。其在無刷直流電動(dòng)機(jī)的使用,用來檢測(cè)永磁鐵的位置。霍爾傳感器廣泛應(yīng)用
2018-11-09 16:26:02
采用霍爾傳感器測(cè)量電機(jī)轉(zhuǎn)速為什么測(cè)量顯示的速度比實(shí)際速度大十倍左右??求大神答疑解惑,感謝感謝
2019-10-30 21:20:48
在磁性傳感器中,利用霍爾效應(yīng)的傳感器稱為霍爾傳感器。霍爾傳感器包括幾個(gè)部分。首先,它包含一個(gè)霍爾元件,該霍爾元件輸出通過霍爾效應(yīng)產(chǎn)生的霍爾電壓(HV)。其次,它包含一個(gè)霍爾IC,該霍爾IC使霍爾輸出
2020-08-27 09:32:51
霍爾傳感器,也稱為轉(zhuǎn)子位置傳感器(RPS),是洗衣機(jī)自動(dòng)化系統(tǒng)的一部分。它有助于控制板確保一切正常運(yùn)行。基本上,霍爾傳感器會(huì)密切關(guān)注洗衣機(jī)的電機(jī),以確保它在洗滌過程中正確且正確地工作。霍爾傳感器位于
2019-01-07 14:45:58
和計(jì)數(shù)它檢測(cè)的次數(shù)。這是一個(gè)非常簡(jiǎn)單的Arduino代碼,它利用Arduino的中斷引腳0(數(shù)字引腳2)。每當(dāng)霍爾效應(yīng)傳感器檢測(cè)到磁鐵時(shí),它會(huì)向其Vout引腳輸出高(5V)電壓。連接到Vout
2018-12-04 15:35:55
最近在選擇霍爾電流傳感器,但是遇到挺多疑問的。希望請(qǐng)教一下大家。測(cè)量的是交流側(cè),希望傳感器輸出也是交流電流。但是找到的很多霍爾元件都是直流輸出,請(qǐng)問交流輸出的要怎么選型,有沒有推薦的型號(hào),交流側(cè)額定電流30A。
2016-03-14 11:27:56
由于傳感器應(yīng)用十分廣泛,類型多種多樣,在各行各業(yè)都有應(yīng)用。因此,在這里主要介紹用于振動(dòng)測(cè)試的振動(dòng)傳感器的選型。按測(cè)量振動(dòng)參量分類可分為三大類:位移傳感器、速度傳感器和加速度傳感器(也稱為加速度
2020-08-11 07:49:37
商業(yè)硅霍爾傳感器與量子阱霍爾傳感器生成的區(qū)別在哪?
2022-02-22 08:03:43
與單片機(jī)接口。因此霍爾傳感器已廣泛應(yīng)用于微機(jī)測(cè)控系統(tǒng)及智能儀表中,是替代互感器的新一代產(chǎn)品。在此提出了利用霍爾傳感器對(duì)電參量特別是對(duì)高電壓、大電流的參數(shù)的測(cè)量。 1 測(cè)量原理 1.1 霍爾效應(yīng)
2018-11-15 14:42:49
傳感器主要分單極接近型和雙極鎖存型,其基本原理和應(yīng)用不再闡述,以下介紹幾種在位置傳感和旋轉(zhuǎn)測(cè)量中的特殊用法。 1 雙極性開關(guān)型霍爾效應(yīng)傳感器 成品霍爾傳感器在芯片封裝時(shí)無統(tǒng)一標(biāo)準(zhǔn),或用磁體的S極觸發(fā)
2018-10-30 17:02:21
如何利用BLDC的3個(gè)霍爾傳感器測(cè)量速度呢?
2023-04-18 17:38:17
如何利用TMS2407和霍爾傳感器測(cè)電機(jī)轉(zhuǎn)速并控制,求教編程思想...
2014-05-04 20:31:15
如何利用ds1302和霍爾傳感器進(jìn)行測(cè)速?
2016-04-11 13:36:01
我正在使用 MC Workbench 工具來驅(qū)動(dòng)帶有霍爾傳感器的三相 BLDC 電機(jī)。我在工作臺(tái)中啟用了霍爾傳感器,下載了代碼并刷新了我的電路板。如何實(shí)際使用霍爾傳感器來控制速度?無論我設(shè)置什么速度,電機(jī)總是會(huì)達(dá)到最大值。
2023-01-03 09:11:29
霍爾效應(yīng)傳感器根據(jù)磁場(chǎng)改變其輸出電壓。霍爾效應(yīng)器件被用作接近傳感器,用于檢測(cè)定位、速度和電流,它們廣泛應(yīng)用于電機(jī)控制系統(tǒng)中。因?yàn)闄C(jī)械部件不會(huì)著時(shí)間而磨損,所以霍爾效應(yīng)傳感器是長(zhǎng)期的解決方案。集成
2021-03-11 07:29:55
線性霍爾傳感器的好壞可以按圖1搭一個(gè)測(cè)試電路,以三端管腳的3503U(電動(dòng)自行車上調(diào)速用)為例。 圖2測(cè)試線性霍爾傳感器好壞的電路 圖2中,電源電壓為直流6V,測(cè)試電表為UT60E數(shù)字萬用表(撥在
2018-12-04 14:56:33
幾個(gè)問題:
應(yīng)選擇雙Hall速度傳感器還是角度傳感器進(jìn)行檢測(cè)?
如角度傳感器輸出為sin+/sin-/cos+/cos-的模擬信號(hào),能否與TLE9853適配?
如使用速度傳感器,能否實(shí)現(xiàn)輸出角度檢測(cè)?
什么情況下應(yīng)使用速度傳感器?
什么情況下應(yīng)使用角度傳感器?
2024-02-02 08:07:35
當(dāng)主傳感器為 Observer+PLL,輔助傳感器為霍爾傳感器時(shí),會(huì)生成類似的項(xiàng)目。現(xiàn)在嘗試將霍爾傳感器作為主要傳感器,但在構(gòu)建項(xiàng)目時(shí)存在錯(cuò)誤。
2022-12-26 06:29:54
器件的推出標(biāo)志著英飛凌在傳感器產(chǎn)品創(chuàng)新領(lǐng)域又邁出重要一步。 英飛凌科技股份公司作為汽車傳感器市場(chǎng)領(lǐng)導(dǎo)者,其此次推出的TLE4966V,也是一款用于檢測(cè)轉(zhuǎn)動(dòng)方向和速度的垂直雙霍爾傳感器。其主要的優(yōu)勢(shì)
2018-11-13 15:58:22
自從有了霍爾效應(yīng)傳感器以來,它奪得了設(shè)計(jì)師的設(shè)計(jì)想象力,一般認(rèn)為固態(tài)器件比機(jī)械電子器件更為可靠。然而,當(dāng)比較干簧管傳感器技術(shù)與霍爾傳感器技術(shù)時(shí),你可觀察到干簧管傳感器一些值得注意的優(yōu)點(diǎn)。
2020-04-14 07:54:26
干簧管傳感器與霍爾效應(yīng)傳感器的比較對(duì)比分析哪個(gè)好?
2021-06-08 07:03:59
自從有了霍爾效應(yīng)傳感器以來,它奪得了設(shè)計(jì)師的設(shè)計(jì)想象力,一般認(rèn)為固態(tài)器件比機(jī)械電子器件更為可靠。然而,當(dāng)比較干簧管傳感器技術(shù)與霍爾傳感器技術(shù)時(shí),你可觀察到干簧管傳感器一些值得注意的優(yōu)點(diǎn)。
2019-11-05 08:12:22
: 高可靠性 6: 線編程使其具有最佳性能 7: 可靠的 EMC 性能 8: 無旁路電容的穩(wěn)壓器穩(wěn)定 單極霍爾元件廣范用于:1:速度和RPM(轉(zhuǎn)速)傳感器2:電動(dòng)機(jī)和風(fēng)機(jī)控制3:磁編碼4^轉(zhuǎn)速計(jì), 計(jì)數(shù)
2013-06-17 17:02:58
線性霍爾元件的原理是什么?有哪些應(yīng)用?開關(guān)型霍爾傳感器的原理是什么?有哪些應(yīng)用?
2021-06-08 07:04:22
在變頻器輸出電流檢測(cè)中經(jīng)常用到霍爾傳感器,請(qǐng)問怎么判斷霍爾傳感器的好壞以及如何校正?
2024-01-09 16:03:28
霍爾效應(yīng)原理是什么?用霍爾傳感器測(cè)量電參量的原理是什么?怎么實(shí)現(xiàn)基于霍爾傳感器電參量測(cè)量系統(tǒng)的設(shè)計(jì)?
2021-05-18 06:24:25
整體上講,有霍爾傳感器,主要可以檢測(cè)轉(zhuǎn)子的位置,判斷轉(zhuǎn)子位置比較方便。無霍爾傳感器就需要通過檢測(cè)電機(jī)反電動(dòng)勢(shì)的過零,來代替霍爾傳感器的作用。沒有霍爾傳感器可以減小電機(jī)的體積,且無需更換霍爾傳感器
2021-09-06 07:24:05
時(shí)克服磁性轉(zhuǎn)子慣性,使高速旋轉(zhuǎn)的磁性轉(zhuǎn)子快速停止,終止脈沖信號(hào)輸出,控制器接收不到脈沖信號(hào),立即指令燃?xì)忾_關(guān)比例閥關(guān)閥,切斷氣源,有效降低停水溫升。 2、霍爾傳感器是利用霍爾元件的霍爾效應(yīng)原理來直接或
2019-12-13 16:15:55
目前需要在磁場(chǎng)變化的時(shí)候輸出一個(gè)報(bào)警,目前還沒搞明白霍爾傳感器能不能實(shí)現(xiàn)功能線性霍爾傳感器還是用開關(guān)行霍爾傳感器?請(qǐng)大家?guī)兔χv講,或者可以選擇其他傳感器
2012-12-25 15:19:08
測(cè)磁場(chǎng)變化用開關(guān)型霍爾傳感器好還是線性霍爾傳感器的好
2015-05-08 12:20:49
測(cè)磁場(chǎng)用什么型號(hào)的霍爾傳感器
2015-05-05 12:39:33
的兩個(gè)磁鐵經(jīng)過霍爾效應(yīng)傳感器。圖示中的輪子,帶有兩個(gè)等距的磁鐵,傳感器上的電壓在一個(gè)周期內(nèi)將兩次達(dá)到峰值。通常被用于計(jì)量車輪和軸的速度,例如在內(nèi)燃機(jī)點(diǎn)火定時(shí)(正時(shí))或轉(zhuǎn)速表上。其在無刷直流電動(dòng)機(jī)
2018-10-24 10:16:07
Adaptive c) Hidden Fixed d) Hidden Adaptive 5.以下哪些傳感器是單霍爾傳感器? a) TLE4983C b) TLE4941PlusC c) TLE4953C d
2018-12-18 09:44:47
英飛凌(Infineon)科技股份公司宣布推出兩款全新的可編程線性霍爾傳感器TLE4997和TLE4998。這兩款線性霍爾傳感器具備最高的精度,完全符合汽車行業(yè)要求。此外,TLE4997傳感器
2018-10-29 15:29:16
英飛凌科技股份公司宣布推出兩款全新的可編程線性霍爾傳感器。這兩款傳感器經(jīng)過專門設(shè)計(jì),適用于需要精確角度和位置檢測(cè)的汽車級(jí)產(chǎn)品的苛刻要求。英飛凌新型TLE4997和TLE4998線性霍爾傳感器
2018-10-29 15:13:40
有誰用過霍爾傳感器測(cè)電機(jī)轉(zhuǎn)速?我用霍爾傳感器測(cè)量電機(jī)轉(zhuǎn)速,總是有誤差,希望大神能指導(dǎo)下。謝謝
2019-09-10 02:51:20
誰有霍爾傳感器U18的中文資料
2013-04-13 13:35:05
***it du=P2^6;***it we=P2^7;***it beep=P2^3;***it gd=P2^0;//光電傳感器接口當(dāng)光耦傳感器被遮光時(shí)電壓由0V變?yōu)?b class="flag-6" style="color: red">5V***it hr=P2^1;//霍爾傳感器
2013-05-16 13:01:04
3kHz左右。 B、精度區(qū)別 開環(huán)式霍爾電流傳感器副邊輸出與磁芯氣隙處的磁感應(yīng)強(qiáng)度成正比,而磁芯由高導(dǎo)磁材料制作而成,非線性和磁滯效應(yīng)是所有高導(dǎo)磁材料的固有特點(diǎn),因此,開環(huán)式霍爾電流傳感器一般線性度角差
2014-05-18 16:57:39
或半導(dǎo)體的兩端產(chǎn)生電壓差,這個(gè)電壓差,稱為霍爾電勢(shì)。 普通代替產(chǎn)生的霍爾電勢(shì)非常微弱,不易測(cè)量,因此,直到出現(xiàn)利用半導(dǎo)體材料制作的霍爾元件后,霍爾效應(yīng)才得以廣泛的應(yīng)用。 早期的霍爾電流傳感器是利用
2014-05-30 16:07:46
會(huì)出現(xiàn)一個(gè)電壓(圖中的Vh稱為霍爾電壓)。霍耳效應(yīng)[應(yīng)用]利用霍爾效應(yīng)的磁傳感器產(chǎn)品得到了廣泛應(yīng)用,許多測(cè)量?jī)x器和傳感器產(chǎn)品都是基于霍耳效應(yīng),如磁強(qiáng)計(jì),壓力傳感器、電流傳感器、轉(zhuǎn)速表、計(jì)數(shù)器、接近開關(guān)等
2021-05-28 06:05:41
霍爾速度傳感器的內(nèi)部結(jié)構(gòu)用2.2.2.3 中介紹的差動(dòng)霍爾電路制成的霍爾齒輪傳感器,如圖22 所示,新一代的霍爾齒輪轉(zhuǎn)速傳感器,廣泛用于新一
2009-03-06 10:04:39 4967
4967 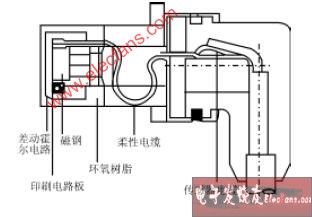
霍爾加速度傳感器
圖31 示出霍爾加速度傳感器的結(jié)構(gòu)原理和靜態(tài)特性曲線。在盒體的O 點(diǎn)上固定均質(zhì)彈簧片S,片S 的中部U處裝一慣性塊
2009-03-06 10:14:442679 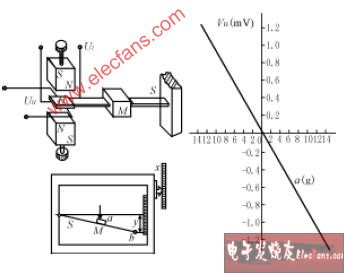
基于VB的霍爾傳感器性能測(cè)試系統(tǒng)設(shè)計(jì)
引言霍爾傳感器是利用霍爾效應(yīng)工作的半導(dǎo)體元件。由于霍爾元件轉(zhuǎn)換效率高、響應(yīng)速度快、動(dòng)態(tài)范圍寬
2010-01-11 10:05:03887 英飛凌科技股份公司(FSE代碼:IFX / OTCQX代碼:IFNNY)推出了針對(duì)要求最高精度、最低能耗和最小空間的汽車和工業(yè)應(yīng)用的霍爾傳感器。全新TLE496x傳感器提供全球最小的霍爾傳感器封裝(SOT23)。
2013-05-03 15:25:411678 2013年12月20日——汽車傳感器市場(chǎng)領(lǐng)導(dǎo)者英飛凌科技股份公司(法蘭克福股票交易所股票代碼:IFX / 美國(guó)柜臺(tái)交易市場(chǎng)股票代碼:IFNNY)今天發(fā)布用于檢測(cè)轉(zhuǎn)動(dòng)方向和速度的垂直雙霍爾傳感器
2013-12-20 18:19:221794 由霍爾開關(guān)集成傳感器和磁性轉(zhuǎn)盤組成,霍爾式轉(zhuǎn)速傳感器的各種不同結(jié)構(gòu)如圖所示。將磁性轉(zhuǎn)盤的輸入軸與被測(cè)轉(zhuǎn)軸相連,當(dāng)被測(cè)轉(zhuǎn)軸轉(zhuǎn)動(dòng)時(shí),磁性轉(zhuǎn)盤便隨之轉(zhuǎn)動(dòng),固定在磁性轉(zhuǎn)盤附近的霍爾開關(guān)集成傳感器便可在每一個(gè)小磁鐵通過時(shí)產(chǎn)生一個(gè)相應(yīng)的脈沖
2017-11-02 15:21:3448342 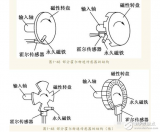
霍爾效應(yīng)傳感器根據(jù)磁場(chǎng)改變其輸出電壓。霍爾效應(yīng)器件用作接近傳感器以及定位、速度和電流檢測(cè)。它們廣泛用于電機(jī)控制系統(tǒng)。霍爾效應(yīng)傳感器是一種持久的解決方案,因?yàn)闆]有機(jī)械部件會(huì)隨著時(shí)間的推移而磨損。
2022-08-09 09:36:021445 
摘要: 霍爾傳感器(霍爾開關(guān),線性霍爾傳感器等)被用于檢測(cè)磁場(chǎng)強(qiáng)度變化的,接近傳感器,位置和速度測(cè)量等應(yīng)用中。它們甚至還用于計(jì)算機(jī)打印機(jī),氣壓缸,計(jì)算機(jī)鍵盤等。
2022-12-23 15:52:107035 
霍爾效應(yīng)傳感器集成電路TLE4941的目的是提供有關(guān)信息轉(zhuǎn)速到現(xiàn)代車輛動(dòng)態(tài)控制系統(tǒng)和ABS 。
2023-01-08 14:56:181683 ?在磁性傳感器中,利用霍爾效應(yīng)的傳感器稱為霍爾傳感器。霍爾傳感器包括幾個(gè)部分。首先,它包含一個(gè)霍爾元件,該霍爾元件輸出通過霍爾效應(yīng)產(chǎn)生的霍爾電壓(HV)。其次,它包含一個(gè)霍爾IC,該霍爾IC使霍爾輸出通過IC工藝變?yōu)楦?低數(shù)字輸出。第三,它包含一個(gè)線性霍爾IC,可放大并線性化霍爾輸出。
2023-07-25 09:38:271002
 電子發(fā)燒友App
電子發(fā)燒友App



 式 4-1
式 4-1







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論