 電子發(fā)燒友App
電子發(fā)燒友App


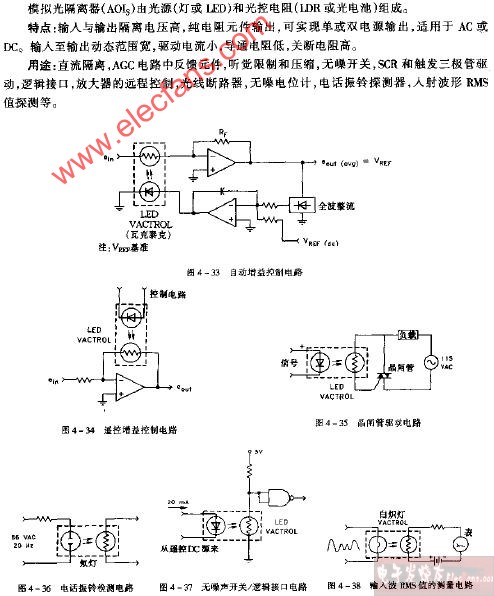
晶閘管調(diào)速電路圖(四)
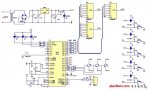
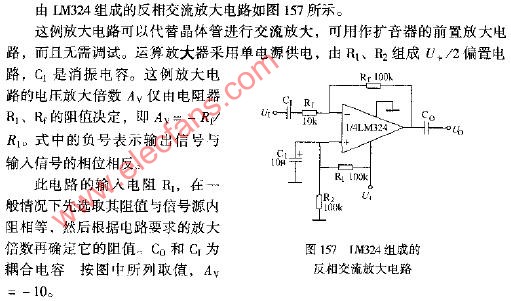
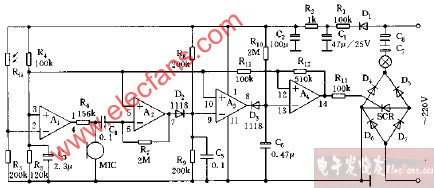
晶閘管調(diào)速器電路如圖9-13所示,是廣泛應(yīng)用于小型直流電動(dòng)機(jī)調(diào)速的控制電路。調(diào)速器電路主要由電壓給定環(huán)節(jié)、觸發(fā)脈沖環(huán)節(jié)、電壓和電流反饋環(huán)節(jié)及主回路和勵(lì)磁部分組成。電路中采用了電流正反饋和電壓負(fù)反饋環(huán)節(jié)來代替測速發(fā)電機(jī)進(jìn)行電樞電壓無級(jí)調(diào)速。
其工作原理如下
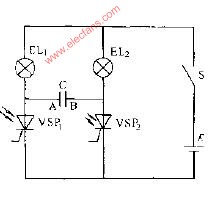
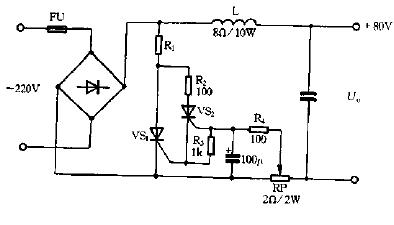
(1)主電路【圖9-13(a)部分】
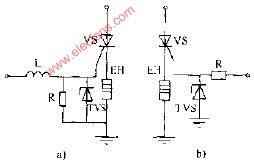
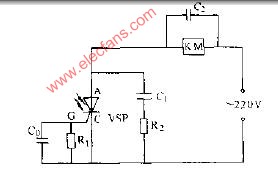
主電路為單相半控橋式全波整流電路,220V交流電源經(jīng)整流后,成為直流電動(dòng)機(jī)調(diào)壓調(diào)速電源。為防止晶閘管在接通和斷開過程中產(chǎn)生過電壓,在晶閘管V16和V17兩端分別并接著由電阻R18和電容C8、R19和C9串聯(lián)組成的阻容保護(hù)裝置;由于主電路中串接電抗器L,使主回路負(fù)載電流連續(xù),并減小了電流脈動(dòng);為保證晶閘管可靠換向而不失控,并接在電動(dòng)機(jī)兩端的續(xù)流二極管V20為電動(dòng)機(jī)提供了放電回路;電阻R16是電動(dòng)機(jī)的能耗制動(dòng)電阻,在電動(dòng)機(jī)正常運(yùn)轉(zhuǎn)時(shí),由于接觸器KM的常閉觸點(diǎn)斷開,R16并沒有接入主電路,只有停車時(shí)接觸器KM斷電,常閉觸點(diǎn)閉合,R16才接入主電路,使電動(dòng)機(jī)進(jìn)行能耗制動(dòng);R13是電流正反饋電阻,R12、R14、RP3組成了電壓負(fù)反饋支路。
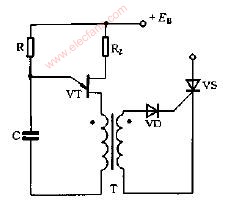
(2)電動(dòng)機(jī)勵(lì)磁【圖9-13(b)部分】
電動(dòng)機(jī)勵(lì)磁繞組電壓是由單相橋式整流電路供電的。為了防止勵(lì)磁電流小而造成飛車,勵(lì)磁回路中串接有零電流檢測繼電器KA,當(dāng)勵(lì)磁電流小到某一值時(shí),KA釋放,其聯(lián)鎖觸點(diǎn)控制主接觸器KM斷電,使電動(dòng)機(jī)M立即停轉(zhuǎn)。
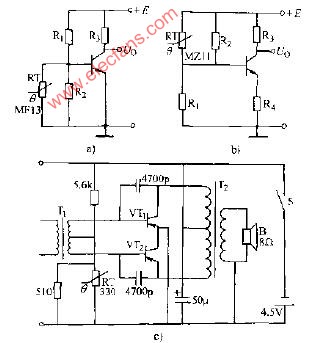
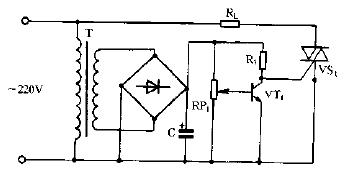
(3)給定回路【圖9-13(c)部分】
變壓器TC二次側(cè)40V電壓、整流橋VC2、給定電位器RP組成了給定電壓回路。通過調(diào)節(jié)RP,可改變給定電壓魄的大小,從而改變電動(dòng)機(jī)M轉(zhuǎn)速的高低。
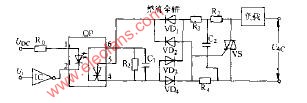
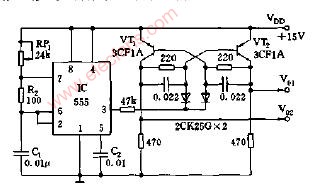
(4)觸發(fā)脈沖電路【圖9-13(d)部分】
該觸發(fā)器采用單結(jié)晶體管構(gòu)成簡單的觸發(fā)電路,由變壓器TC、變壓器TC二次側(cè)70V電壓、整流、削波、放大、RC回路及脈沖形成輸出等環(huán)節(jié)組成。變壓器TC輸出70V電壓經(jīng)VC1整流和穩(wěn)壓管V1限幅削波后,輸出梯形波,作為觸發(fā)電路的同步電壓。梯形波再經(jīng)過電容C5濾波后得到約為11V的放大器直流電源電壓。二極管V5的作用是將一個(gè)電源隔離成兩種電壓。晶體管V10的電路為電流反饋放大器,其射極電阻R10很大,使放大電路獲得較好的線性特性。當(dāng)有正向信號(hào)電壓加到V10的基極時(shí),其集電極電壓隨著信號(hào)的增大而降低,晶體管V7中流過的電流也隨著V10集電極電位的變化而變化,相當(dāng)于V7管集射極之間的等效電阻也在改變,起到了可變電阻的作用,使電容C2的充電速度也相應(yīng)跟隨改變,從而達(dá)到觸發(fā)脈沖移相的目的。當(dāng)C2的充電電壓UC2達(dá)到單結(jié)晶體管V6的峰點(diǎn)電壓UP時(shí),V6導(dǎo)通,電容C2通過電阻R3急速放電,使脈沖功率放大三極管V4導(dǎo)通,其作用是把前級(jí)的尖脈沖放大,由脈沖變壓器TC1輸出一個(gè)具有一定幅值、寬帶和陡度的脈沖到晶閘管控制極,使晶閘管V16和V17觸發(fā)。隨著C2放電,UC2迅速下降到V6的谷點(diǎn)電壓Ur時(shí),V6截止,電容C2又重新充電,重復(fù)上述過程。因此,只要改變輸入信號(hào)電壓Ug的大小,即可改變電容C2充電到UP的時(shí)間,就可改變產(chǎn)生第一個(gè)脈沖的時(shí)間,從而改變晶閘管導(dǎo)通角a的大小,達(dá)到改變電動(dòng)機(jī)電樞電壓調(diào)速的目的。通過上述調(diào)節(jié),電動(dòng)機(jī)能獲得大約12:1的調(diào)速比。V3是保護(hù)V4管的,當(dāng)V4截止時(shí),變壓器TC1的原邊會(huì)產(chǎn)生感應(yīng)電動(dòng)勢,可通過V3進(jìn)行放電,從而防止V4損壞。R2是溫度補(bǔ)償電阻。
系統(tǒng)中采用了電流正反饋和電壓負(fù)反饋環(huán)節(jié),反饋電壓分別從電阻R13和電位器RP3取出后與調(diào)速給定電位器RP及轉(zhuǎn)速下限調(diào)節(jié)電位器RP2上的給定電壓比較后,加到放大器V10的基極。當(dāng)負(fù)載波動(dòng)電流增大時(shí),電動(dòng)機(jī)電樞電壓下降,轉(zhuǎn)速降低,電壓負(fù)反饋減小,而電流正反饋電壓增大,使綜合給定電壓增加,觸發(fā)脈沖前移,晶閘管導(dǎo)通角α增大,電動(dòng)機(jī)電樞電壓上升,并使電動(dòng)機(jī)轉(zhuǎn)速上升,從而保證了電動(dòng)機(jī)轉(zhuǎn)速不因負(fù)載變化而變化,使電動(dòng)機(jī)有足夠的機(jī)械硬特性。
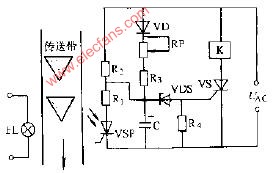
(5)保護(hù)環(huán)節(jié)【圖9-13(e)部分】
為了防止電動(dòng)機(jī)在啟動(dòng)及過載的情況下出現(xiàn)過電流,系統(tǒng)中還設(shè)有電流截止反饋環(huán)節(jié),是由R13、RP4、V9和V8等元件組成的,當(dāng)電動(dòng)機(jī)的電流超過規(guī)定允許值時(shí),從電位器RP4上取出一個(gè)與電動(dòng)機(jī)電流大小成比例的電流信號(hào),經(jīng)穩(wěn)壓管V9加于三極管V8的基極,使V8導(dǎo)通,其集射極間的電阻急劇下降,將電容器C2旁路,使單結(jié)晶體管V6無脈沖輸出,晶閘管在無觸發(fā)脈沖信號(hào)下立即處于關(guān)斷狀態(tài),從而達(dá)到限流的目的。
另外,為了限制電動(dòng)機(jī)啟動(dòng)時(shí)的電流沖擊,在V10的輸入端并聯(lián)有電容C4,可使電動(dòng)機(jī)緩慢肩動(dòng)。為了防止電動(dòng)機(jī)在過渡過程中出現(xiàn)的過電壓,在V10的輸入端還并接有限幅用的二極管V11、V12、V13,防止V10管損壞。
(6)電源進(jìn)線【圖9-13(f)部分】
電源可直接取自220V電網(wǎng),在電源兩端并接著由電阻R17和C7串聯(lián)組成的阻容保護(hù)裝置,防止電源或負(fù)載側(cè)輸入過電壓。熔斷器FU為進(jìn)線電源短路保護(hù)。
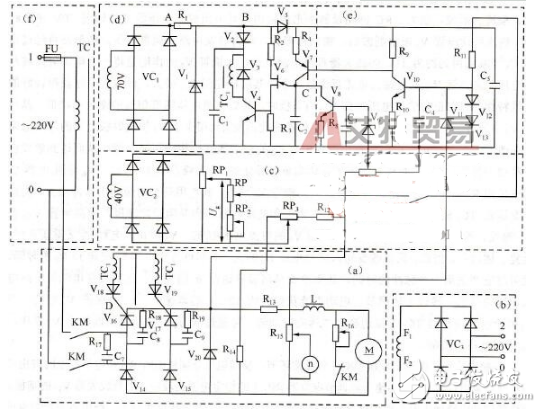
圖9-13晶閘管調(diào)速器電路













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論