 電子發(fā)燒友App
電子發(fā)燒友App


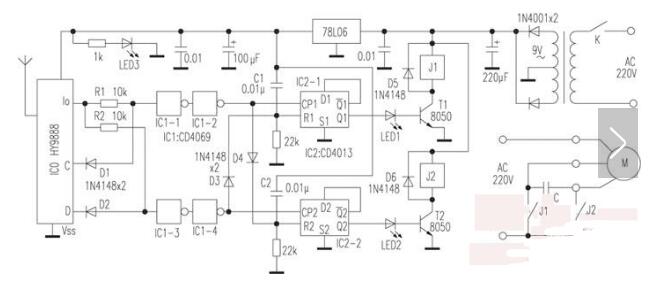
5、步進(jìn)電機驅(qū)動模塊
步進(jìn)電機是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機構(gòu),具有瞬時啟動和急速停止的優(yōu)越特性,通過改變脈沖的順序就可以方便的改變轉(zhuǎn)動的方向,步進(jìn)電機必 須加驅(qū)動才可以運轉(zhuǎn),驅(qū)動信號必須為脈沖信號,沒有脈沖的時候步進(jìn)電機靜止, 當(dāng)步進(jìn)電機驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進(jìn)電機按設(shè)定的方向轉(zhuǎn)動一 個固定的角度(即步進(jìn)角)。轉(zhuǎn)動的速度與脈沖的頻率成正比。可以通過控制脈沖個數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的; 同時可以通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和加速度,從而達(dá)到調(diào)速的目的。
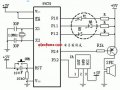
步進(jìn)電機驅(qū)動電路如圖3-11所示。本系統(tǒng)采用的是額定電壓為5V DC,相數(shù)為4相的步進(jìn)電機,驅(qū)動方式為4 相8拍,一共有5根連接線,其中紅色為電源線,采用單極性直流電源供電。由于單片機I/0 口輸出的電流比較弱不能直接驅(qū)動步進(jìn)電機。所以要加一個ULN2003 芯片(步進(jìn)電機驅(qū)動芯片) 來放大電流使之能夠驅(qū)動步進(jìn)電機工作。
ULN2003芯片是高耐壓、大電流,內(nèi)部由七個硅NPN達(dá)林頓管組成的驅(qū)動芯片。經(jīng)常在以下電路中使用,顯示驅(qū)動、繼電器驅(qū)動、照明燈驅(qū)動、伺服電機驅(qū)動、步進(jìn)電機驅(qū)動等電路中。ULN2003 的每一對達(dá)林頓管都串聯(lián)一個2.7K 的基極電阻,在5V 的工作電壓下它能與TTL 和CMOS 電路直接相連。可以直接處理原先需要標(biāo)準(zhǔn)邏輯緩沖器來處理的數(shù)據(jù)。ULN2003工作電壓高,工作電流大,灌電流可達(dá)500mA,并且能夠在關(guān)態(tài)時承受50V的電壓,輸出還可以在高負(fù)載電流并行運行。
ULN2003 的封裝采用DIP-16 或S0P-16,ULN2003 可以驅(qū)動7 個繼電器具有高電壓輸出特性,并帶有共陰極的續(xù)流二極管使器件可用于開關(guān)型感性負(fù)載。每對達(dá)林頓管的額定集電極電流是500mA,達(dá)林頓管還可以并聯(lián)使用以達(dá)到更高的電流輸出能力。
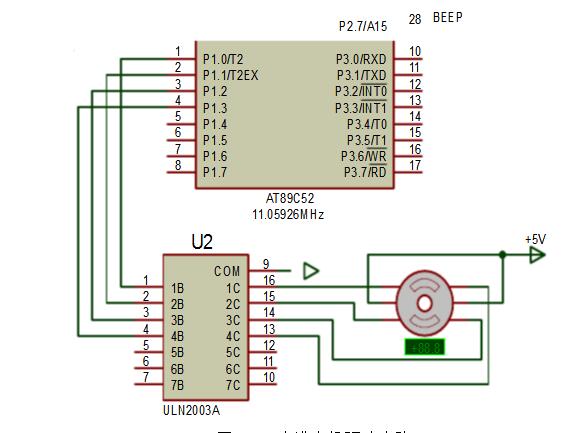
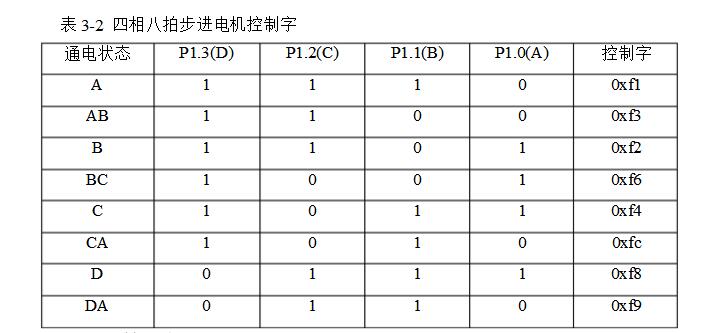
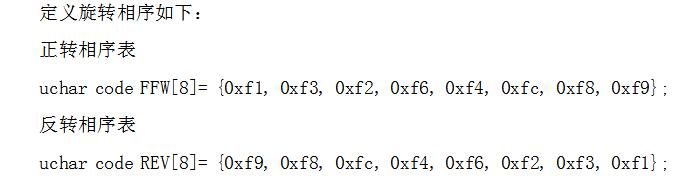
當(dāng)對步進(jìn)電機施加一系列連續(xù)不斷的控制脈沖時,它可以連續(xù)不斷地轉(zhuǎn)動。每一個脈沖信號對應(yīng)步進(jìn)電機的某一相或兩相繞組的通電狀態(tài)改變一次,對應(yīng)轉(zhuǎn) 子也就轉(zhuǎn)過一定的角度(一個步距角), 步距角為對應(yīng)一個脈沖信號, 電機轉(zhuǎn)子 轉(zhuǎn)過的角位移,當(dāng)通電狀態(tài)的改變完成一個循環(huán)時,轉(zhuǎn)子轉(zhuǎn)過一個齒距。由于單片機I/0 口沒有上拉電阻驅(qū)動能力有限,需要通過ULN2003來驅(qū)動步進(jìn)電機”。驅(qū)動端口為P1.0(A), P1.1(B), P1.2(C),P1.3(D)。紅色電線接電源+5V,橙色 電線接P1.3 口,黃色電線接P1.2 口,粉色電線接P1.1口,藍(lán)色電線接P1.0 口。如果P1口輸出的控制信號中,0代表使繞組通電,1代表使繞組斷電。則步進(jìn)電機的控制字見表3-2。
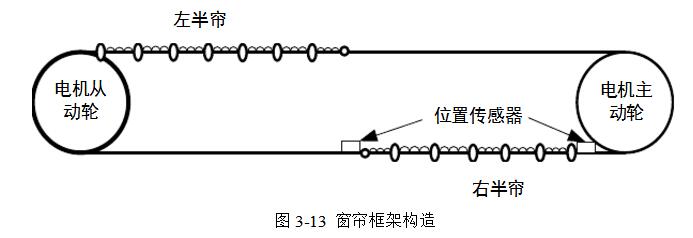
6、窗簾框架構(gòu)造設(shè)計
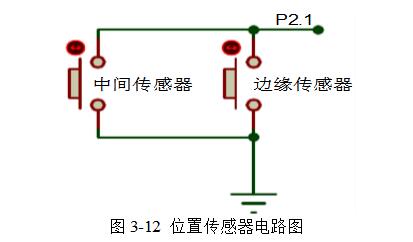
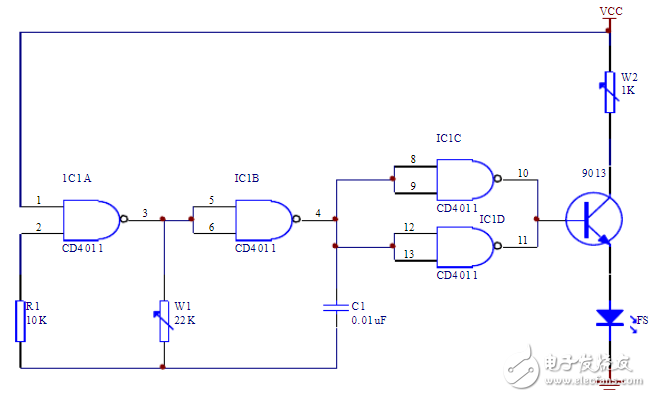
窗簾框架構(gòu)造設(shè)計包括位置傳感器開關(guān)電路和窗簾架結(jié)構(gòu)的設(shè)計。本設(shè)計中采用兩個位置傳感器接在單片機的P2.1引腳上,位置傳感器電路圖如圖3-12所示。位置傳感器固定在窗簾滑桿上,一個安裝在窗簾桿的正中間,另一個安裝 在窗簾桿的最左端或最右端。當(dāng)窗簾完全打開或完全關(guān)閉時,位置傳感器便產(chǎn)生有效信號并送給單片機,通過程序使步進(jìn)電機停轉(zhuǎn),窗簾停止運動,防止在窗簾完全打開(關(guān)閉) 時步進(jìn)電機繼續(xù)運行損壞窗簾。窗簾框架構(gòu)造如圖3-13 所示。














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論