 電子發(fā)燒友App
電子發(fā)燒友App


魚類的游動具有高效性、機(jī)動性以及低噪性等優(yōu)點。因此,仿生機(jī)器魚的研究己成為機(jī)器人研究領(lǐng)域的熱點。隨著仿生機(jī)器魚研究的不斷深入,仿生機(jī)器魚在水下搜救、水質(zhì)檢測以及海洋資源勘探等領(lǐng)域發(fā)揮著重要的作用。近年來,機(jī)器魚也成為國內(nèi)國際高校機(jī)器人比賽項目之一。本文就是針對在國際水中機(jī)器人大賽的大平臺上的三關(guān)節(jié)機(jī)器魚而設(shè)計的一套雙關(guān)節(jié)機(jī)器魚控制系統(tǒng)。本機(jī)器魚控制系統(tǒng)具有體積小、成本低、微功耗等優(yōu)點,可以方便地運(yùn)用到類似的機(jī)器魚產(chǎn)品中。
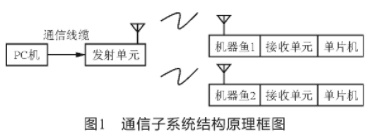
機(jī)器魚控制系統(tǒng)總體結(jié)構(gòu)如圖1所示。系統(tǒng)主要分為指令發(fā)送端和指令執(zhí)行端,兩部分均以CC1110無線單片機(jī)作為核心控制器,負(fù)責(zé)指令的發(fā)送、接收、數(shù)據(jù)處理,進(jìn)而控制機(jī)器魚的相關(guān)執(zhí)行機(jī)構(gòu)工作。指令發(fā)送端的指令來自上位機(jī),USB串口轉(zhuǎn)換電路將USB接口模擬成串口,實現(xiàn)上位機(jī)與CC1110的串口通信。電源模塊完成電壓的變換,為相關(guān)電路提供各種合適的工作電壓。存儲器模塊存儲機(jī)器魚的相關(guān)信息。舵機(jī)驅(qū)動模塊為執(zhí)行機(jī)構(gòu)舵機(jī)提供合適的控制信號。
USB串口轉(zhuǎn)換電路
CH341T是一款USB總線轉(zhuǎn)接芯片,通過簡單的接線即可實現(xiàn)USB接口和串口之間的轉(zhuǎn)換,此時無需改動上位機(jī)與下位機(jī)的程序,通過USB接口即可實現(xiàn)上位機(jī)與下位機(jī)的串行通信。USB串口轉(zhuǎn)換電路原理圖如圖2所示。
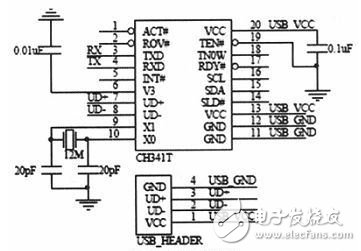
圖2 USB串口轉(zhuǎn)換電路
在本設(shè)計電路中,將CH341T芯片的SDA和SCL引腳懸空,此時芯片功能為USB轉(zhuǎn)異步串口,模擬計算機(jī)串口;CH341T芯片的TXD和RXD兩個引腳分別連接到CC1110無線單片機(jī)的RX(P0.2)和TX(P0.3)兩個引腳;TEN#引腳為串口發(fā)送使能端,接地使CH341T能發(fā)送數(shù)據(jù)。 CH341T芯片的地要和CC1110無線單片機(jī)的地相連。CH341T不需外接電源,直接由上位機(jī)通過USB口提供+5V電源。
DC—DC電壓變換電路
指令發(fā)送端由USB提供5V電壓,指令執(zhí)行端由電池提供5V直流電壓。電池提供的5V直流電壓可以直接為舵機(jī)驅(qū)動芯片以及舵機(jī)供電。而系統(tǒng)內(nèi)部CC1110 無線單片機(jī)正常工作電壓范圍是2.0~3.6V,存儲器芯片24AA01正常工作電壓范圍是1.7~5.5V,這里可以將二者的工作電壓選擇為3.3V。為此,專門設(shè)計了一個DC—DC電壓變換電路,將5V直流電壓變換為3.3V直流電壓后再提供給CC1110無線單片機(jī)和24AA01芯片,以保證系統(tǒng)的正常工作。這里采用AMS公司生產(chǎn)的AMS1117芯片設(shè)計了電壓變換電路,具體的DC-DC電壓變換電路如圖3所示。
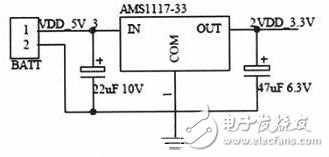
圖3 DC-DC電壓變換電路
在電壓輸入端接有22 μF電解電容及電壓輸出端接有47 μF電解電容,以保證輸出電壓的穩(wěn)定。
CC1110無線收發(fā)電路
在機(jī)器魚控制系統(tǒng)中,機(jī)器魚指令的發(fā)送、接收以及指令解析執(zhí)行是系統(tǒng)的關(guān)鍵部分。而現(xiàn)有的無線收發(fā)系統(tǒng)很多都是采用單片機(jī)和RF收發(fā)模塊組成,這樣整個控制電路的體積較大,將會使機(jī)器魚的體積變大。為了將機(jī)器魚體積做小以及將功耗降低,這里采用TI公司生產(chǎn)的一種低成本、低功耗的CC1110無線單片機(jī)作為指令收發(fā)執(zhí)行的核心器件。CC1110無線收發(fā)電路如圖4所示。

圖4 CC1110無線收發(fā)電路
在無線收發(fā)電路中,電容C1—C6為電源去耦電容;電阻R2和電容C18構(gòu)成上電復(fù)位電路;電容C7、C9以及電感L1、L2構(gòu)成BALUN阻抗匹配電路,將輸出阻抗轉(zhuǎn)換為50 Ω標(biāo)準(zhǔn)天線阻抗;Y1、C13以及C14構(gòu)成CC1110高速時鐘源;Y2、C15以及C16構(gòu)成CC1110低速時鐘源:JATG接口用于在線調(diào)試與下載程序;PWM01(P1.0)和PWM02(P1.1)接舵機(jī)驅(qū)動電路的輸入;RX(P0.2)和TX(P0.3)接USB串口轉(zhuǎn)換電路,用于串口通信;2401_WP(P0.4)、2401_SCL(P0.5)以及2401_SDA(P0.6)接存儲器模塊,控制存儲器的讀寫。
舵機(jī)驅(qū)動電路
在機(jī)器魚控制系統(tǒng)中,我們利用舵機(jī)的擺動來模擬機(jī)器魚的游動。而無線單片機(jī)產(chǎn)生的PWM信號不足以驅(qū)動舵機(jī),為保證舵機(jī)正常工作,要專門設(shè)計一個舵機(jī)驅(qū)動電路。舵機(jī)驅(qū)動電路采用了NXPSemiconductors公司生產(chǎn)的74AHCT1G04芯片,舵機(jī)驅(qū)動電路原理圖如圖5所示。
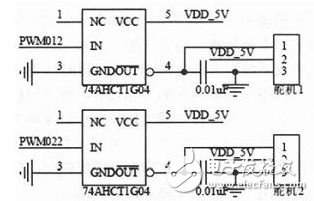
圖5 舵機(jī)驅(qū)動電路
存儲器電路
在機(jī)器魚初始化階段以及在機(jī)器魚控制過程中需要存儲一些參數(shù),因此要有專門的存儲模塊。由于參數(shù)的數(shù)據(jù)量比較小,這里采用Microchip公司生產(chǎn)的I2C接口的24AA01存儲芯片,存儲器電路原理圖如圖6所示。
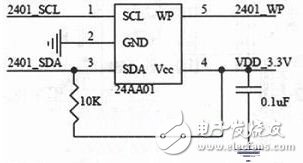
圖6 存儲器電路
本文設(shè)計的機(jī)器魚控制系統(tǒng)通過了下水測試。在機(jī)器魚下水測試階段,利用串口調(diào)試助手對機(jī)器魚進(jìn)行直接發(fā)送控制指令實驗,對機(jī)器魚的調(diào)直數(shù)據(jù)保存、直游以及轉(zhuǎn)彎進(jìn)行了直接控制。測試結(jié)果表明,機(jī)器魚控制系統(tǒng)可以有效地接收上位機(jī)發(fā)送的指令數(shù)據(jù),并執(zhí)行相關(guān)的動作,達(dá)到了較好的控制效果。同時,本文的研究設(shè)計工作為進(jìn)一步研究設(shè)計自主機(jī)器魚以及多魚協(xié)作提供了較好的軟硬件設(shè)計基礎(chǔ)。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論