超聲波模塊的工作原理是什么?怎樣去設(shè)計(jì)一種基于超聲波模塊的智能避障小車呢?
2021-11-17 06:56:02
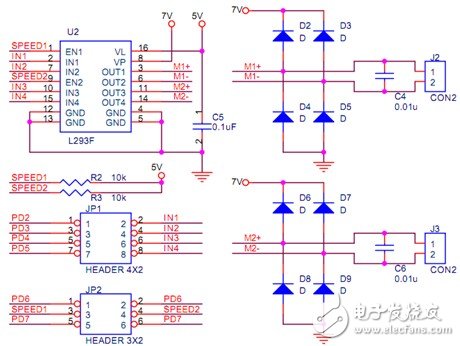
STM32智能壁障小車源程序和原理圖,感興趣的小伙伴們可以看看。
2016-07-26 10:26:39 190
190 基于單片機(jī)藍(lán)牙控制的智能避障小車控制系統(tǒng)
2021-11-12 15:51:0125 基于stm32的智能小車作品(循跡避障藍(lán)牙)(下)五、避障小車制作1.超聲波模塊接線2.工作原理3. 超聲波避障程序六、藍(lán)牙遙控小車制作1.模塊介紹+接線3.藍(lán)牙遙控小車程序4.藍(lán)牙串口APP總結(jié)
2021-12-28 19:03:1772 慧晶電子 Arduino 智能小車源代碼,基本的 超聲波壁障 循跡 藍(lán)牙控制等
2015-12-16 16:53:4160 基于DSP的智能小車避障系統(tǒng)設(shè)計(jì),感興趣的小伙伴們可以看看。
2016-08-09 15:45:559 基于DSP的智能小車避障系統(tǒng)設(shè)計(jì)_閆晶
2017-01-12 18:09:581 尋跡和避障智能小車系統(tǒng)設(shè)計(jì)_李志宜
2017-01-19 21:54:153 該項(xiàng)目的主要內(nèi)容是:在智能尋跡避障小車尋跡系統(tǒng)上擴(kuò)展避障、報(bào)警等電路模塊,然后運(yùn)用C語言對這些功能模塊電路進(jìn)行編程,使智能尋跡避障小車在行進(jìn)過程中,能對正前方的障礙物自動完成避障功能,并且遇障礙能夠
2019-04-16 08:00:0015 基于STM32的智能循跡往返小車電路設(shè)計(jì)
2017-04-10 09:30:5659 STM32f10xc8t6L智能小車藍(lán)牙避障完整PWM控制程序
2021-12-23 17:06:057 智能循跡避障小車設(shè)計(jì)與實(shí)現(xiàn)
2017-06-06 08:48:15300 基于紅外避障的智能小車的設(shè)計(jì)_強(qiáng)彥
2017-01-21 12:16:5127 本文檔的主要內(nèi)容介紹的是基于AT89C52的智能小車,包括超聲波和紅外自動避障以及尋跡,藍(lán)牙和紅外遙控控制小車4種智能小車的介紹和設(shè)計(jì)程序詳細(xì)概述
2018-06-05 08:00:0072 智能循跡避障小車程序,紅外循跡
2017-12-11 16:37:4154 基于單片機(jī)C51智能尋跡避障小車,包括元件清單 分立模塊 原理圖 PCB 程序
2016-07-21 16:35:2833 紅外避障小車設(shè)計(jì)論文紅外避障小車設(shè)計(jì)論文紅外避障小車設(shè)計(jì)論文
2015-11-13 15:57:49103 單片機(jī)的智能尋跡避障小車設(shè)計(jì)整理過的智能小車畢業(yè)論文
2016-03-14 15:50:1126 基于stm32的智能小車作品(循跡避障藍(lán)牙)(上)前言一、材料準(zhǔn)備二、AD畫板+焊接1.原理圖2.pcb圖3.裸板成品4.焊好后成品三、讓輪子動起來并實(shí)現(xiàn)pwm調(diào)速1.接線2.實(shí)現(xiàn)pwm調(diào)速四、循跡
2022-01-14 11:53:0153 基于51單片機(jī)的多功能藍(lán)牙循跡避障測距小車設(shè)計(jì)方法。
2021-05-27 14:42:5465 本文設(shè)計(jì)了一款基于 STC89C52 型單片機(jī)控制的智能小車,該小車可以在提前規(guī)劃好的路線上行駛,同時可以實(shí)現(xiàn)自動避障的功能
2022-05-16 11:26:0631 尋跡避障一體小車尋跡避障一體小車尋跡避障一體小車尋跡避障一體小車
2015-11-13 15:53:5438 藍(lán)牙遙控是依靠單片機(jī)的串口通訊來實(shí)現(xiàn)的功能。這周我主要學(xué)習(xí)的內(nèi)容是串口通訊。在完成學(xué)習(xí)后我用之前買避障小車時順便買的藍(lán)牙模塊做了一個升級版智能小車,它可以通過藍(lán)牙模塊實(shí)現(xiàn)避障模式與藍(lán)牙遙控模式的切換
2021-11-23 17:21:0513 本文為實(shí)現(xiàn)智能小車的避障要求,設(shè)計(jì)了一套超聲波傳感器測距系統(tǒng)。首先介紹了超聲波傳感器工作原理和應(yīng)用電路設(shè)計(jì),并詳細(xì)說明了使用CD4051的簡單電路實(shí)現(xiàn)多路超聲波信號的循環(huán)發(fā)射與接收電路以及接收芯片CX20106的使用情況,最后給出了如何提高精度的方法,從而增強(qiáng)了系統(tǒng)的可靠性。
2017-12-07 16:50:38 12402
12402 
此書介紹了循跡壁障智能小車,內(nèi)容詳細(xì),解讀明確,值得品讀。
2015-12-09 17:13:168 本文檔的主要內(nèi)容詳細(xì)介紹的是使用Arduino設(shè)計(jì)的智能小車自動避障的接線說明。
2019-11-22 08:00:0018 集合幾十篇整理過的智能小車畢業(yè)論文(包括循跡避障智能小車論文等)
2016-03-14 15:52:04230 基于STM32的智能尋跡避障小車(完整版) 使用舵機(jī)+超聲波多個方向避障 ,ST188尋跡,OLED顯示工作模式。
2017-03-15 16:51:33185 自動避障小車
arduino版的自動避障小車,自己寫的程序
2015-11-24 15:24:0055 介紹一種基于MSP430F2274單片機(jī)為核心的智能小車,小車采用超聲波測距技術(shù)實(shí)現(xiàn)自動避障,同時通過語音模塊來播報(bào)出小車與障礙物的距離。
2015-08-06 10:57:2510605 本項(xiàng)目是在 PVCBOT-A型 基礎(chǔ)平臺車——BEAM小車的基礎(chǔ)上,加裝了避障傳感器以及控制電路,組成了一臺具體有避障功能的小車。而這個所謂避障小車,實(shí)際上就是和 PVCBOT-1號 機(jī)器人類似的避
2018-09-18 09:35:0018002 基于單片機(jī)尋跡巡線避障智能小車系統(tǒng)設(shè)計(jì)資料(畢設(shè)課設(shè)資料)
2021-11-12 16:36:0035 設(shè)計(jì)簡介:本設(shè)計(jì)是基于單片機(jī)的紅外避障、循跡小車,主要實(shí)現(xiàn)以下功能:小車可通過手機(jī)控制 實(shí)現(xiàn)紅外避障與循跡功能標(biāo)簽:STM32單片機(jī)、紅外避障、循跡、小車題目擴(kuò)展:循跡小車、避障小車、小車資料預(yù)覽
2021-11-19 09:21:08226 最近學(xué)校舉辦了一個智能小車比賽,比賽內(nèi)容為用手機(jī)藍(lán)牙控制小車擁有5個功能,分別是超聲波舵機(jī)避障,測距(顯示在LCD1602上),紅外跟隨,循跡還有藍(lán)牙控制小車前進(jìn)后退左轉(zhuǎn)又轉(zhuǎn)以及停止。文章目錄藍(lán)牙
2021-11-11 17:36:0142 **51單片機(jī)智能小車(舵機(jī)云臺超聲波避障+循跡+藍(lán)牙+紅外跟隨+遙控+TFT液晶顯示屏)本人由于使用的液晶顯示屏,程序大于8K,所以更換為STC12C5A60S2芯片,與51芯片兼容。功能比較
2021-11-12 14:21:0247
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論