增量光電編碼器基本波形和電路
?
采用旋轉(zhuǎn)式光電編碼器,把它的轉(zhuǎn)軸與重力測量儀中補(bǔ)償旋鈕軸相連。重力測量儀中補(bǔ)償旋鈕的角位移
2009-09-26 17:28:45 5680
5680 增量式光電編碼器原理及其結(jié)構(gòu)
增量式光電編碼器的特點(diǎn)是每產(chǎn)生一個輸出脈沖信號就對應(yīng)于
2010-06-02 22:50:4618420 `8.5020.4551.1024 KUBLER增量編碼器增量型, 標(biāo)準(zhǔn), 光電編碼器 Sendix 5020特征:Sendix 5000 和 5020 系列編碼器采用了 Safety-Lock
2019-12-20 11:57:18
5腳增量式旋轉(zhuǎn)編碼器,想測轉(zhuǎn)角和轉(zhuǎn)數(shù),完全沒有頭緒,接線也有疑問,知道怎么弄的快來!!
2016-08-28 11:53:30
實(shí)驗(yàn)?zāi)康模簞傞_始接觸關(guān)機(jī)電機(jī)檢測領(lǐng)域,準(zhǔn)備探索關(guān)于定時器編碼器的應(yīng)用,用來檢測脈沖數(shù),從而進(jìn)行轉(zhuǎn)速的檢測。使用芯片:STM32F407使用平臺:STM32Cube IDE1、使用編碼器的原理網(wǎng)上介紹
2021-08-19 07:32:06
增量型拉繩編碼器在使用時應(yīng)注意什么?增量型拉繩編碼器在安裝使用過程中會遇到很多問題,如果不注意會造成信號不穩(wěn)定,嚴(yán)重時會損壞拉線繩編碼器內(nèi)部電路,所以在安裝調(diào)試時一定按照使用說明書安裝,那么?在
2018-12-21 11:37:27
`<p>增量型拉繩編碼器在使用時應(yīng)注意什么?增量型拉繩編碼器在安裝使用過程中會遇到很多問題,如果不注意會造成信號不穩(wěn)定,嚴(yán)重時會損壞拉線繩編碼器內(nèi)部電路,所以在安裝調(diào)試
2018-12-19 16:22:43
`<p>增量型拉繩編碼器在安裝及使用中應(yīng)注意的事項增量型拉繩編碼器在安裝時應(yīng)注意三方面的要求:機(jī)械安裝尺寸,包括拉繩傳感器主體、孔位;輸出線出線方式;安裝空間;工作環(huán)境
2018-12-24 10:25:31
本帖最后由 這般緣 于 2016-5-13 11:03 編輯
如題,我現(xiàn)在角度編碼器加電后A,B相用示波器看能看到波形。選的計數(shù)器卡是NI6284的,角度編碼器的A,Z,B與6284ctr0
2016-05-13 10:59:13
增量編碼器回轉(zhuǎn)轉(zhuǎn)速什么意思?我這個回轉(zhuǎn)轉(zhuǎn)速是多少
2022-07-29 09:19:24
增量式編碼器與絕對值式編碼器的區(qū)別是什么?直流電機(jī)和交流電機(jī)的區(qū)別是什么?
2021-10-12 06:17:13
增量式編碼器輸出的脈沖波形信號形式常見的有哪幾種?增量式編碼器倍頻技術(shù)的M法究竟是怎樣測速的?
2021-11-09 07:08:29
增量式編碼器如何使用外部中斷實(shí)現(xiàn)測速?
2021-11-16 08:25:38
大神們!增量式編碼器是怎樣使用的
2015-08-02 08:23:42
編碼器的使用1.1 增量式編碼器倍頻計數(shù)增量式編碼器的脈沖波形型號形式常見的有兩種:一種是占空比為50%的方波,通道A和B相位差為90°;另外一種是正弦波這類模擬信號,通道A和B相位差也是90
2021-09-01 06:58:40
增量式編碼器增量式編碼器也成為正交編碼器,是通過兩個信號線的脈沖輸出來進(jìn)行數(shù)據(jù)處理,一個輸出脈沖信號就對應(yīng)于一個增量位移,編碼器每轉(zhuǎn)動固定的位移,就會產(chǎn)生一個脈沖信號 通過讀取單位時間脈沖信號的數(shù)量
2022-01-10 06:08:32
增量式光電編碼器結(jié)構(gòu)和原理增量式光電編碼器結(jié)構(gòu)如圖1所示。在它的編碼盤邊緣等間隔地制出n個透光槽。發(fā)光二極管(LED)發(fā)出的光透過槽孔被光敏二極管所接收。當(dāng)碼盤轉(zhuǎn)過1/n圈時,光敏二極管即發(fā)出一個
2016-09-12 13:43:01
請問有沒有了解增量式旋轉(zhuǎn)編碼器的高手,幫我解決一下一直困擾我問題:1.關(guān)于編碼器內(nèi)部的內(nèi)插細(xì)分 有的碼器的內(nèi)插細(xì)分值有1,2,4,6,10,16等,每一個旋轉(zhuǎn)編碼器有一個固定的內(nèi)插細(xì)分值還是有多個
2011-10-16 14:30:25
增量式旋轉(zhuǎn)編碼器怎么用的??怎么把它和減速步進(jìn)電機(jī)用51單片機(jī)聯(lián)系起來啊??
2015-07-30 21:12:59
閱讀目錄一、增量式旋轉(zhuǎn)編碼器二、硬件設(shè)計三、軟件設(shè)計Development kit:MDK5.14IDE:UV4MCU:STM32F103C8T6回到頂部一、增量式旋轉(zhuǎn)編碼器1、簡介編碼器
2021-12-01 07:57:34
A、B相是4分頻的,增量編碼器是相對編碼方式,Z相作為參考位置。對編碼器脈沖進(jìn)行計數(shù)。得到的計數(shù)值可以通過公式自己轉(zhuǎn)換成旋轉(zhuǎn)角度值,程序里面沒有給出。
2013-09-11 14:26:11
1.編碼器簡介編碼器分類: 按工作原理:光電式、磁電式和觸點(diǎn)電刷式 按碼盤的刻孔方式:增量式和絕對式兩類 由于博主接觸面還不是很廣,一共就用過兩個種類的編碼器,都是屬于光電的差分編碼器:一般由8根線
2021-08-19 08:28:28
的應(yīng)用 增量型編碼器與絕對型編碼器區(qū)別 1、角度測量 汽車駕駛模擬器,對方向盤旋轉(zhuǎn)角度的測量選用光電編碼器作為傳感器。重力測量儀,采用光電編碼器,把他的轉(zhuǎn)軸與重力測量儀中補(bǔ)償旋鈕軸相連,扭轉(zhuǎn)角度儀,利用
2017-11-24 19:00:47
增量型編碼器,AB相,如何檢測脈沖和正反轉(zhuǎn)
2023-11-06 07:39:14
。BiliBili視頻****硬件接口示意圖使用增量型旋轉(zhuǎn)編碼器接線參考增量型旋轉(zhuǎn)編碼器BPI-PicoW-S3GNDGND+VBUSSWDTGP0CLKGP1增量型旋轉(zhuǎn)編碼器外觀粗看與一些常見的旋轉(zhuǎn)
2022-11-30 08:56:57
空心軸增量式編碼器 軸增量式編碼器輪轂軸增量式編碼器無軸承增量式編碼器套件/模塊化增量式編碼器光學(xué)增量式編碼器磁增量式編碼器危險等級遞增編碼器軸絕對編碼器輪轂軸絕對編碼器空心軸絕對編碼器光學(xué)絕對編碼器磁絕對編碼器微型旋轉(zhuǎn)編碼器非接觸式旋轉(zhuǎn)編碼器
2020-07-17 09:54:48
請問FM350-2可以帶8路增量式編碼器采集速度嗎? FM350-2是8 通道智能計數(shù)器模塊,我想用來采集8路增量式編碼器,采用速度測量模式來得到轉(zhuǎn)速信號,請問各位高手,可以實(shí)現(xiàn)嗎?
2023-12-20 08:19:17
本帖最后由 美麗時光2017 于 2017-6-7 11:35 編輯
自己寫的小模塊,不足之處敬請指教!/*編碼器輸入模塊(增量型A,B,Z)*/module ENCODER(input
2017-06-07 11:35:25
剛剛學(xué)習(xí)fpga方面的知識,fpga如何測量一個增量式編碼器,消除抖動的話是否也是在上升沿和下降沿都進(jìn)行計數(shù)處理,這樣的話怎樣設(shè)定可以保障計數(shù)器可以同時在兩個always 下進(jìn)行計數(shù),可以給一下大概的例程最好
2016-01-11 18:27:47
我想問一下,TI的PMSM的例程庫里,增量編碼器永磁同步電機(jī),初始位置是通過什么方式實(shí)現(xiàn)的。在例程的那個位置,謝謝
2018-10-30 15:58:42
Ⅰ 關(guān)于編碼器編碼器的種類有很多,什么增量式編碼器、絕對值編碼器,有軸或者無軸編碼器,電壓輸出、推拉輸出、集電極開路輸出等等。但不管什么類型的編碼器,其目的都類似,得到轉(zhuǎn)動的角度,角速度、位移等
2020-05-28 08:00:00
baumer增量式編碼器HOG10DN1024I LR現(xiàn)貨促銷baumer增量式編碼器功能分辨率為 18 位/圈,精確度為 ±0,01°憑借非接觸多圈設(shè)計,抗沖擊強(qiáng)度可達(dá) 200 gbaumer增量
2018-07-22 17:51:03
` 本帖最后由 YSHL2016 于 2016-9-28 08:44 編輯
在simulink中的matlab function寫的增量式編碼器仿真模型。模型輸入為電機(jī)模型輸出的機(jī)械角度thet
2016-09-28 08:34:22
stm32 的Encoder 使用增量式編碼器在實(shí)際應(yīng)用中還是很常見。stm32的定時器帶的也有編碼器模式。所用的編碼器是有ABZ三相,其中ab相是用來計數(shù),z相輸出零點(diǎn)信號。AB相根據(jù)旋轉(zhuǎn)的方向
2021-08-04 08:11:00
本帖最后由 松山歸人 于 2021-5-28 10:58 編輯
大家好!特邀趙云老師為大家講解增量型編碼器與絕對型編碼器的原理與分類希望對大家學(xué)習(xí)有所幫助,請持續(xù)關(guān)注,我們會繼續(xù)更新!配套講解文本見附件:
2021-05-28 10:52:37
電路上使輸出脈沖數(shù)增加到槽數(shù)的2倍,4倍)。2、分辨率分辨率表示旋轉(zhuǎn)編碼器的主軸旋轉(zhuǎn)一周,讀出位置數(shù)據(jù)的最大等分?jǐn)?shù)。絕對值型不以脈沖形式輸出,而已代碼形式表示當(dāng)前主軸位置(角度)。與增量型不同,相當(dāng)于
2021-05-17 13:20:52
光柵編碼器可分為兩大類,一是旋轉(zhuǎn)編碼器,用于轉(zhuǎn)角、轉(zhuǎn)速的測量;二是直尺型編碼器,用于直線位移、運(yùn)動速度的測量。在旋轉(zhuǎn)編碼器中,又可分為絕對式編碼器和增量式編碼器。
2019-10-18 09:03:30
利用Arduino、增量式光電編碼器測量速度、方向、位移。材料:Arduino mega 2560分辨率256ABZ相增量式編碼器pc編碼器...
2021-09-03 06:02:43
增量式編碼器工作原理是什么?增量式編碼器的結(jié)構(gòu)是由哪些部分組成的?光電旋轉(zhuǎn)編碼器使用方法是什么?單片機(jī)讀取光柵編碼器角度的方法是什么?
2021-06-30 07:29:18
。增量型編碼器可提供關(guān)于增量位置或角度變化的信息。上電后它們不提供絕對位置,但仍然有可能在一次機(jī)械旋轉(zhuǎn)之后通過索引信號獲得。絕對型編碼器則可始終提供絕對機(jī)械位置。 增量型編碼器可顯示三種差分信號:A
2018-09-05 16:07:42
的Rep-Avago的48mm的6通道增量式編碼器在智控型紡織機(jī)的應(yīng)用。智控型紡織機(jī)的紡織機(jī)構(gòu)的平衡對提高部件工作的可靠性,降低振動,特別是降低紡織生產(chǎn)中的噪音具有重要意義。在紡織機(jī)中除了應(yīng)用與一般機(jī)械制造業(yè)上
2019-06-14 05:00:01
增量型編碼器的工作原理是什么?誤碼脈沖產(chǎn)生的原因及其濾除方法是什么?
2021-04-29 06:09:49
傳統(tǒng)型編碼器測速方案編碼器,經(jīng)常被用來測量速度或者顯示電機(jī)位置,大致分為絕對值式編碼器和增量式編碼器,顧名思義,相對應(yīng)的是產(chǎn)生增量或者絕對信號。增量信號不表示特定位置,只表示位置已經(jīng)更改;絕對信號
2022-02-23 07:16:13
CUI 關(guān)于 PPR 的博客文章,了解有關(guān)此主題的更多信息。通過仔細(xì)觀察圖 2,您會發(fā)現(xiàn)其中只有四個不同的重復(fù)輸出狀態(tài)。因此,增量編碼器必須以已知的固定位置為參考,才能提供有意義的位置信息。這個
2018-12-20 16:31:09
1、工作方式不同:增量型編碼器斷電后需要回原點(diǎn),它無法輸出軸轉(zhuǎn)動的絕對位置信息,存在零點(diǎn)累計誤差,抗干擾較差,接收設(shè)備的停機(jī)需斷電記憶,開機(jī)應(yīng)找零或參考位。絕對編碼器不需要回原點(diǎn),它由機(jī)械位置確定編碼
2023-04-20 16:19:54
信號轉(zhuǎn)換為電信號,查表得到轉(zhuǎn)子于所處信號周期內(nèi)的相對偏移量。在離線狀態(tài)下,用高分辨率的增量式光電軸角編碼器進(jìn)行校準(zhǔn),對其A/B相脈沖輸出和磁電式軸角編碼器的霍爾信號同時采樣并上傳到計算機(jī)進(jìn)行高精度信號
2010-06-02 10:04:24
那個增量式編碼器輸出的信號然后怎么通過無線模塊發(fā)射出去
2012-04-17 23:31:38
產(chǎn)品介紹:RCI058C是precilec雷恩品牌下的增量式編碼器系列,該系列采用標(biāo)準(zhǔn)58外徑,整個產(chǎn)品在外形上采用緊湊型設(shè)計,小巧,方便安裝在狹小的空間, 該系列編碼器的原理采用的是磁電式
2022-01-19 09:54:19
產(chǎn)品介紹:rci90p系列是precilec品牌下的外徑90mm增量型編碼器,通孔孔徑可達(dá)30mm,其他尺寸可定制,在設(shè)計上,應(yīng)用高精度的光電原理,使測量更加精準(zhǔn),結(jié)合抗老化工藝處理,使編碼器抗干擾
2022-01-24 15:28:46
產(chǎn)品介紹:rci115d系列是precilec品牌下的外徑115mm重載型增量型編碼器,產(chǎn)品采用實(shí)心軸設(shè)計,軸徑10mm、11mm、12mm可選,其他尺寸可定制,在設(shè)計上,應(yīng)用高精度的光電原理,使
2022-01-26 11:05:22
增量 型 編 碼器是一種角位移和角速度測量元件,可以直接將角位移或角速度變成相應(yīng)的脈沖序列信號,在檢測物體的位移和角度等方面有著廣泛的應(yīng)用。增量型編碼器有A,B,Z三相
2008-10-19 16:49:21 45
45 ;其中RCI58B開頭的型號,說明了是增量型,外徑尺寸58mm,盲孔;RCI58B法國雷恩Precilec增量編碼器主要是用來精確測量轉(zhuǎn)軸的速度,位置在工業(yè)環(huán)境中,比
2022-06-13 09:17:26
針對絕對式光電軸角編碼器在采用CAN 總線通信方式控制系統(tǒng)中的應(yīng)用,提出編碼器數(shù)據(jù)傳輸接口的一種新方法,即通過CAN 總線接口實(shí)現(xiàn)在帶有多傳感器、多分系統(tǒng)的控制系統(tǒng)中數(shù)據(jù)
2009-06-25 14:53:1628 如果要在增量型編碼器后方安裝額外的部件,就可以使用RHI 74產(chǎn)品線系列的增量型編碼器.為此,該旋轉(zhuǎn)編碼器使用一個安全穿過本體的空心軸套.該增量型旋轉(zhuǎn)編碼器直接安裝
2010-10-08 07:49:5545 增量編碼器是一種將旋轉(zhuǎn)位移轉(zhuǎn)換為一連串?dāng)?shù)字脈沖信號的旋轉(zhuǎn)式傳感器。這些脈沖用來控制角位移,如果編碼器與齒輪齒條或螺旋絲杠結(jié)合在一起,也可以用來測量直線位
2010-10-19 16:54:5425 SPMC75增量編碼器接口應(yīng)用
增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90o,從而可方便地判斷出旋轉(zhuǎn)方向,而Z相為每轉(zhuǎn)一
2009-09-19 10:30:071119 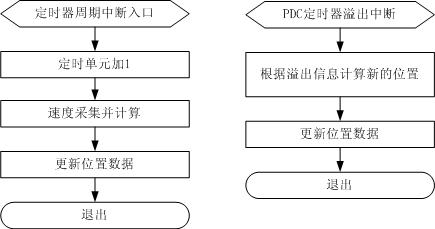
如何使用增量編碼器
1,增量型旋轉(zhuǎn)編碼器有分辨率的差異,使用每圈產(chǎn)生的脈沖數(shù)來計量,數(shù)目從6到5400或更高,脈沖數(shù)越多,分辨
2009-09-26 17:35:044056 增量型編碼器與絕對型編碼器的區(qū)別
編碼器如以信號原理來分,有增量型編碼器,絕對型編碼器。 增 量 型 編 碼 器 (旋轉(zhuǎn)
2009-09-26 17:36:292348 增量光電編碼器基本波形和電路圖
增量編碼器是以脈沖形式輸出的傳感器,其碼盤比絕對編碼器碼盤要簡單得多
2009-10-29 22:55:062244 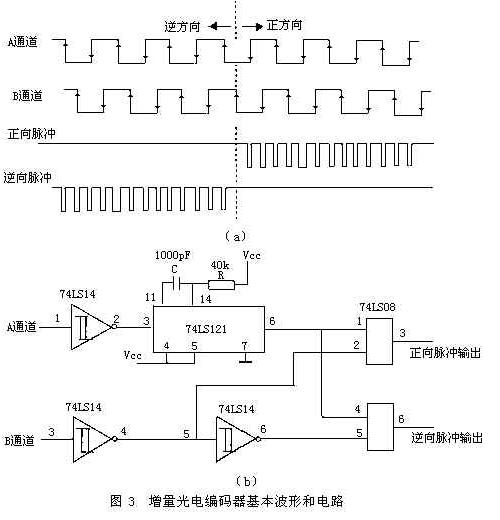
增量編碼器
增量編碼器又稱脈沖編碼器,其結(jié)構(gòu)簡單,一般只有三個碼道,不能直接產(chǎn)生幾位編碼輸出,如圖12.3.2所示。它是一個被劃分成若干個交替透明和
2009-10-29 23:05:144374 絕對式光電軸角編碼器CAN總線接口
1 引 言絕對式光電軸角編碼器是一種數(shù)字測角裝置,實(shí)時測量轉(zhuǎn)軸所處的角位置及角速度,它把軸角信息轉(zhuǎn)換成度、分、
2009-11-04 09:28:111160 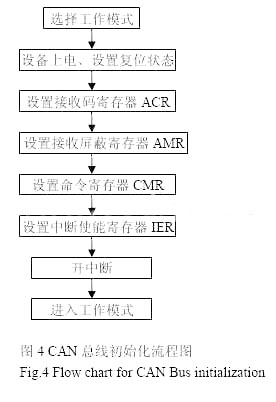
光電軸角編碼器的細(xì)分誤差快速測量系統(tǒng)
引 言
光電軸角編碼器,又稱光電角位置傳感器,是一種集光、機(jī)、電為一體的精密數(shù)字測角裝置,它把軸角信息轉(zhuǎn)換
2009-12-19 10:42:49796 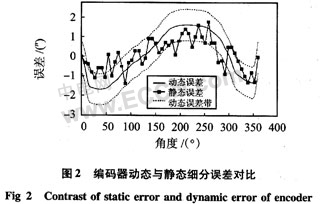
分析機(jī)械式增量型編碼器的毛刺產(chǎn)生機(jī)理,結(jié)合編碼器有效旋轉(zhuǎn)波形和幾種毛刺波形的特點(diǎn),提出一種新的去毛刺算法,在編碼器的相位超前輸出端的下降沿,判斷一次相位滯后端的輸
2011-09-07 14:59:5480 分析了光電編碼器4倍頻原理,提出了一種基于可編程邏輯器件FPGA對光電增量式編碼器輸出信號4倍頻、鑒相、計數(shù)的具體方法,它對提高編碼器分辨率與實(shí)現(xiàn)高精度、高穩(wěn)定性的信號檢測
2011-11-03 15:13:1675 增量型編碼器就是每轉(zhuǎn)過單位的角度就發(fā)出一個脈沖信號(也有發(fā)正余弦信號,然后對其進(jìn)行細(xì)分,斬波出頻率更高的脈沖),通常為A相、B相、Z相輸出,A相、B相為相互延遲1/4周期的脈沖輸出,根據(jù)延遲關(guān)系可以
2017-10-23 10:31:563 編碼器把角位移或直線位移轉(zhuǎn)換成電信號,前者稱為碼盤,后者稱為碼尺。按照讀出方式編碼器可以分為接觸式和非接觸式兩種;按照工作原理編碼器可分為增量式和絕對式兩類。
2018-02-05 09:38:4532077 光電編碼器主要有增量式編碼器、絕對式編碼器、混合式絕對值編碼器、旋轉(zhuǎn)變壓器、正余弦伺服電機(jī)編碼器等,其中增量式編碼器、絕對式編碼器、混合式絕對值編碼器屬于數(shù)字量編碼器,旋轉(zhuǎn)變壓器、正余弦伺服電機(jī)編碼器屬于模擬量編碼器。
2018-10-21 10:32:2914395 本文主要闡述了增量式編碼器與絕對式編碼器的區(qū)別。
2019-11-06 14:56:4060888 首先在增量式編碼器安裝設(shè)備之前需要的是要對周邊環(huán)境做一個系統(tǒng)的清潔,設(shè)備周圍的環(huán)境都需注意做好相對應(yīng)的清潔措施。這樣可以更好保證編碼器的工作運(yùn)行。常用的增量式編碼器與一般的設(shè)備的電機(jī)軸有兩種的安裝
2019-11-06 15:20:556989 絕對編碼器這是能將電動機(jī)一轉(zhuǎn)內(nèi)的角度數(shù)據(jù)輸出到外部目標(biāo)的檢測器。絕對編碼器一般能夠以8到12位輸出360 °絕對值編碼器與增量編碼器工作原理非常相似。
2019-12-04 11:06:1826364 )或數(shù)據(jù)進(jìn)行編制、轉(zhuǎn)換為可用以通訊、傳輸和存儲的信號形式的設(shè)備。編碼器把角位移或直線位移轉(zhuǎn)換成電信號,前者稱為碼盤,后者稱為碼尺。按照讀出方式編碼器可以分為接觸式和非接觸式兩種;按照工作原理編碼器可分為增量
2020-07-10 10:34:133127 增量式編碼器 增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90度,從而可方便的判斷出旋轉(zhuǎn)方向,而Z相為每轉(zhuǎn)一個脈沖,用于基準(zhǔn)點(diǎn)定位。
2020-10-15 11:14:087796 閱讀目錄一、增量式旋轉(zhuǎn)編碼器二、硬件設(shè)計三、軟件設(shè)計Development kit:MDK5.14IDE:UV4MCU:STM32F103C8T6回到頂部一、增量式旋轉(zhuǎn)編碼器1、簡介編碼器
2021-11-22 20:06:0344 根據(jù)檢測原理,編碼器可分為光學(xué)式、磁式、感應(yīng)式和電容式,根據(jù)其刻度方法及信號輸出形式,可分為增量式、絕對式以及混合式三種。
2022-12-15 14:17:143907 增量式編碼器是能夠依據(jù)旋轉(zhuǎn)運(yùn)動形成信號的編碼器,其刻度方式為每一個脈沖都進(jìn)行增量測算,因此得名。是能夠依據(jù)旋轉(zhuǎn)運(yùn)動形成信號的編碼器,其刻度方式為每一個脈沖都進(jìn)行增量測算,因此得名。
2023-02-16 17:37:403858 增量式編碼器和絕對值編碼器哪個好? 編碼器是伺服系統(tǒng)上的重要組成部分,可以發(fā)送脈沖給驅(qū)動器,用于運(yùn)動位置的矯正,實(shí)現(xiàn)閉環(huán)控制。目前,常見的伺服編碼器類型有增量式編碼器以及絕對值編碼器兩種,它們哪個
2023-03-19 23:30:032558 隨著工業(yè)4.0發(fā)展需求,工業(yè)機(jī)器人產(chǎn)業(yè)前所未有的崛起,現(xiàn)在在機(jī)器人控制系統(tǒng)中,伺服電機(jī)扮演者重要角色,這樣一來編碼器重要性尤為突出,下面讓我?guī)Т蠹艺J(rèn)識一下絕對編碼器與增量編碼器。
2023-03-28 09:33:31704 隨著工業(yè)4.0發(fā)展需求,工業(yè)機(jī)器人產(chǎn)業(yè)前所未有的崛起,現(xiàn)在在機(jī)器人控制系統(tǒng)中,伺服電機(jī)扮演者重要角色,這樣一來編碼器重要性尤為突出,下面讓我?guī)Т蠹艺J(rèn)識一下絕對編碼器與增量編碼器。
2023-03-28 09:27:19551 有沒有編碼器結(jié)構(gòu)是區(qū)別于伺服系統(tǒng)和普通電機(jī)的第一要素,它可以讓電機(jī)實(shí)現(xiàn)閉環(huán)控制,讓其有更高的控制精度,應(yīng)對更為苛刻的控制項目。目前,最為常見的伺服編碼器主要有增量式和絕對值式兩大類,它們的不同在
2023-04-12 09:05:025850 增量式編碼器一般分為3種類型:單通道增量式編碼器,雙通道增量式編碼器,三通道增量式編碼器。
2023-04-17 09:43:143774 在不同的工作領(lǐng)域和工作中,需要使用對應(yīng)的工具和產(chǎn)品。在處理具有旋轉(zhuǎn)角度編碼器的工作任務(wù)時,了解所需工具的類型是必要的。除了絕對值編碼器外,還有增量式編碼器,二者有什么區(qū)別呢?有什么特征、適合什么樣的應(yīng)用呢?這邊文章給您答案
2023-05-26 10:51:401705 增量式編碼器是能夠依據(jù)旋轉(zhuǎn)運(yùn)動形成信號的編碼器,其刻度方式為每一個脈沖都進(jìn)行增量測算,因此得名。它常與機(jī)械設(shè)備轉(zhuǎn)換裝置搭配使用(如齒條-齒輪、精確測量輪或心軸搭配使用),用以精確測量直線運(yùn)動。增量式編碼器是把位移轉(zhuǎn)換成周期性的電信號,然后把這個電信號轉(zhuǎn)化成計數(shù)脈沖,用脈沖的個數(shù)表示位移的大小。
2023-04-17 15:39:051618 
增量型編碼器與絕對值型編碼器怎么選擇?在進(jìn)行編碼器選擇時,增量型編碼器和絕對值型編碼器是兩種常見的選擇。增量型編碼器是一種基于脈沖計數(shù)的編碼器,通常由光電編碼器和霍爾編碼器組成。這種編碼器的主要優(yōu)點(diǎn)
2023-05-08 11:28:331341 
編碼器,市場上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價格便宜,抗污染等特點(diǎn),有趕超光電編碼器的趨勢。 本文引用地址: 編碼器類型非常多,最常用的是絕對值編碼器、增量編碼器和旋轉(zhuǎn)變壓器,
2023-06-26 14:01:01900 增量式編碼器和絕對值編碼器有哪些區(qū)別?增量式編碼器通過對變化量進(jìn)行計數(shù)來測量位置變化,而絕對值編碼器可提供實(shí)際位置值。因此,增量式編碼器對于測量無限循環(huán)的運(yùn)動比較有用,因?yàn)樗鼈兛梢允褂糜嫈?shù)器來跟蹤旋轉(zhuǎn)次數(shù)和速度。相比之下,絕對值編碼器適用于任務(wù)需要直接獲得位置信息的情景,如機(jī)器人運(yùn)動。
2023-07-05 13:34:282249 
增量式編碼器的分辨率是以編碼器軸轉(zhuǎn)動一周所產(chǎn)生的輸出信號基本周期數(shù)來表示的,即脈沖數(shù)/轉(zhuǎn)(PPR)。本文主要介紹選擇增量編碼器分辨率的方法以及影響增量式編碼器分辨率的因素。
2023-07-26 09:59:56726 增量型編碼器和絕對值編碼器是兩種常見的位置控制裝置,它們在控制位置方面有著不同的工作原理和特點(diǎn)。雖然它們都可以用于位置控制,但是在某些方面存在差異。首先,增量型編碼器是通過檢測位置變化的增量來確定
2023-08-18 14:43:50477 
使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價格便宜,抗污染等特點(diǎn),有趕超光電編碼器的趨勢。今天講的是:增量型、絕對值型、正余弦伺服電機(jī)編碼器。1
2023-08-25 08:09:031589 
什么是磁電編碼器?它的優(yōu)缺點(diǎn)是什么?適用什么場合? 磁電編碼器是一種將轉(zhuǎn)子的位移或位置轉(zhuǎn)換為電信號的裝置。它由一個磁頭和一個磁性編碼盤組成,磁頭用于偵測和測量轉(zhuǎn)子上的磁場,然后將其轉(zhuǎn)換為數(shù)字或模擬
2023-12-25 14:04:27338
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論