 電子發(fā)燒友App
電子發(fā)燒友App


摘要:介紹了一種基于DSP芯片TMS320F206進(jìn)行數(shù)值計(jì)算和實(shí)施控制的自動(dòng)對(duì)焦系統(tǒng)。給出了系統(tǒng)的硬件構(gòu)成和軟件設(shè)計(jì)。該系統(tǒng)不僅充分發(fā)揮了DSP芯片的數(shù)值計(jì)算優(yōu)勢(shì),而且拓展了其在人機(jī)對(duì)話和電機(jī)控制等輸入輸出方面的應(yīng)用。
現(xiàn)代社會(huì)是一個(gè)高度信息化的社會(huì),多媒體技術(shù)的發(fā)展使圖像信息的獲取及其傳輸手段倍受矚目。自動(dòng)對(duì)焦技術(shù)是計(jì)算機(jī)視覺(jué)和各類成像系統(tǒng)的關(guān)鍵技術(shù)之一, 在照相機(jī)、攝像機(jī)、顯微鏡、內(nèi)窺鏡等成像系統(tǒng)中有著廣泛的用途。傳統(tǒng)的自動(dòng)對(duì)焦技術(shù)較多采用測(cè)距法,即通過(guò)測(cè)出物距,由鏡頭方程求出系統(tǒng)的像距或焦距,來(lái)調(diào)整系統(tǒng)使之處于準(zhǔn)確對(duì)焦的狀態(tài)。隨著現(xiàn)代計(jì)算技術(shù)的發(fā)展和數(shù)字圖像處理理論的日益成熟,自動(dòng)對(duì)焦技術(shù)進(jìn)入一個(gè)新的數(shù)字時(shí)代,越來(lái)越多的自動(dòng)對(duì)焦方法基于圖像處理理論對(duì)圖像有關(guān)信息進(jìn)行分析計(jì)算,然后根據(jù)控制策略驅(qū)動(dòng)電機(jī),調(diào)節(jié)系統(tǒng)使之準(zhǔn)確對(duì)焦。
在照相機(jī)、攝像機(jī)、顯微鏡、內(nèi)窺鏡等成像系統(tǒng)中有著廣泛的用途。傳統(tǒng)的自動(dòng)對(duì)焦技術(shù)較多采用測(cè)距法,即通過(guò)測(cè)出物距,由鏡頭方程求出系統(tǒng)的像距或焦距,來(lái)調(diào)整系統(tǒng)使之處于準(zhǔn)確對(duì)焦的狀態(tài)。隨著現(xiàn)代計(jì)算技術(shù)的發(fā)展和數(shù)字圖像處理理論的日益成熟,自動(dòng)對(duì)焦技術(shù)進(jìn)入一個(gè)新的數(shù)字時(shí)代,越來(lái)越多的自動(dòng)對(duì)焦方法基于圖像處理理論對(duì)圖像有關(guān)信息進(jìn)行分析計(jì)算,然后根據(jù)控制策略驅(qū)動(dòng)電機(jī),調(diào)節(jié)系統(tǒng)使之準(zhǔn)確對(duì)焦。
本文利用數(shù)字式CMOS圖像傳感器作為感像器件,運(yùn)用DSP芯片采集圖像信息并計(jì)算系統(tǒng)的對(duì)焦評(píng)價(jià)函數(shù),根據(jù)優(yōu)化的爬山搜索算法控制驅(qū)動(dòng)步進(jìn)電機(jī),調(diào)節(jié)系統(tǒng)光學(xué)鏡頭組的位置,使系統(tǒng)成像清晰,從而實(shí)現(xiàn)自動(dòng)對(duì)焦。這是一種數(shù)字式的自動(dòng)對(duì)焦方法,其準(zhǔn)確性和實(shí)時(shí)性使其在視頻展示臺(tái)和顯微鏡等設(shè)備中的應(yīng)用具有廣泛的前景。
1 系統(tǒng)的硬件構(gòu)成
一個(gè)典型的自動(dòng)對(duì)焦系統(tǒng)應(yīng)具備以下幾個(gè)單元:成像光學(xué)鏡頭組、成像器件、自動(dòng)對(duì)焦單元、鏡頭驅(qū)動(dòng)單元。在本系統(tǒng)中,成像光學(xué)鏡頭組包括光學(xué)濾波器、變焦透鏡組和對(duì)焦透鏡組;成像器件是CMOS數(shù)字式圖像傳感器,輸出圖像信息的數(shù)字量;自動(dòng)對(duì)焦單元由DSP芯片作為核心器件,圖像信息的采集、計(jì)算、控制策略的選擇和控制信號(hào)的產(chǎn)生都在這個(gè)單元中進(jìn)行;鏡頭驅(qū)動(dòng)單元包括步進(jìn)電機(jī)及其驅(qū)動(dòng)電路,該單元接受自動(dòng)對(duì)焦單元的控制,驅(qū)動(dòng)成像光學(xué)鏡頭組中的變焦透鏡組和對(duì)焦透鏡組進(jìn)行位置調(diào)節(jié),最終使圖像傳感器輸出準(zhǔn)確對(duì)焦的圖像。系統(tǒng)的硬件結(jié)構(gòu)如圖1所示。
1.1 數(shù)字式CMOS圖像傳感器
圖像傳感器是把光信號(hào)轉(zhuǎn)換成電信號(hào)的裝置。本系統(tǒng)采用1/3英寸數(shù)字式CMOS圖像傳感器OV7620,總有效像素單元為664(水平方向)x492(垂直方向)像素;內(nèi)置10位雙通道A/D轉(zhuǎn)換器,輸出8位圖像數(shù)據(jù);具有自動(dòng)增益和自動(dòng)白平衡控制,能進(jìn)行亮度、對(duì)比度、飽和度、γ校正等多種調(diào)節(jié)功能;其視頻時(shí)序產(chǎn)生電路可產(chǎn)生行同步、場(chǎng)同步、混合視頻同步等多種同步信號(hào)和像素時(shí)鐘等多種時(shí)序信號(hào);5V電源供電,工作時(shí)功耗<120mW,待機(jī)時(shí)功耗<10μW。
OV7620工作時(shí)序圖如圖2所示。其中,PCLK是圖像傳感器的像素時(shí)鐘,HREF是行同步信號(hào),Y和UV是圖像數(shù)據(jù)信號(hào),VSYNC是幀同步信號(hào),F(xiàn)ODD是奇偶場(chǎng)信號(hào)。
1.2 DSP控制系統(tǒng)
DSP芯片也稱數(shù)字信號(hào)處理器,是一種特別適合于進(jìn)行數(shù)字信號(hào)處理的微處理器,其主要應(yīng)用是實(shí)時(shí)快速地實(shí)現(xiàn)各種數(shù)字信號(hào)處理算法。本系統(tǒng)采用TI公司的DSP芯片TMS320F206進(jìn)行數(shù)值計(jì)算和實(shí)施控制,采用40MHz有源晶振,經(jīng)過(guò)分頻后獲得50ns的系統(tǒng)時(shí)鐘周期。該芯片支持硬件等待狀態(tài),當(dāng)BEADY引腳電平為低時(shí),TMS320F206等待一個(gè)CLOCK1周期并再次檢查READY,在READY被驅(qū)動(dòng)至高電子以前,TMS320F206將不再繼續(xù)執(zhí)行。TMS320F206的工作時(shí)序圖如圖3所示。
1.3 系統(tǒng)的硬件電路
系統(tǒng)的硬件電路如圖4所示。圖像數(shù)據(jù)Y0~Y7通過(guò)74LS245輸入到DSP的數(shù)據(jù)端口D0~D7;行同步信號(hào)HREF、幀同步信號(hào)VSYNC、時(shí)鐘信號(hào)CLOCK、像素時(shí)鐘PCLK分別接至相應(yīng)引腳配合數(shù)據(jù)采集;鍵盤輸入用來(lái)手動(dòng)控制變焦倍率;DSP通過(guò)數(shù)據(jù)端口送出步進(jìn)電機(jī)運(yùn)轉(zhuǎn)所需的三相六拍脈沖時(shí)序,經(jīng)過(guò)74S245緩沖和MC1413功率放大后,驅(qū)動(dòng)步進(jìn)電機(jī)工作。
圖3和圖4
2 系統(tǒng)的軟件設(shè)計(jì)
系統(tǒng)軟件包括數(shù)據(jù)采集及處理、優(yōu)化搜索算法、步進(jìn)電機(jī)驅(qū)動(dòng)和變焦跟蹤等功能模塊。系統(tǒng)軟件流程圖見(jiàn)圖5。
2.1 數(shù)據(jù)采集和計(jì)算
系統(tǒng)上電復(fù)位后,先對(duì)系統(tǒng)初始化,包括對(duì)DSP芯片TMS320F206內(nèi)的RAM區(qū)進(jìn)行功能劃分、定義程序中的變量、驅(qū)動(dòng)聚焦鏡頭的電機(jī)復(fù)位、設(shè)置DSP芯片TMS320F206的輸入輸出端口、設(shè)置TMS320F206的等待狀態(tài)等。
初始化工作完成后,系統(tǒng)進(jìn)入數(shù)據(jù)采集和計(jì)算階段,根據(jù)數(shù)字圖像傳感器提供的場(chǎng)同步、行同步和像素時(shí)鐘等時(shí)序信號(hào),可以方便地選取不同的對(duì)焦窗口采集數(shù)據(jù)。采集完成后,馬上計(jì)算相鄰像素的亮度差值的平方和,并保存到TMS320F206的RAM中。由于TMS320F206提供的重復(fù)執(zhí)行指令極大地節(jié)約了運(yùn)算時(shí)間,因此一行數(shù)據(jù)的差值運(yùn)算根據(jù)采集窗口的不同可在一至兩行的時(shí)間內(nèi)完成。一幀圖像的數(shù)據(jù)采集都完成后,將每一行像素的亮度差值平方和累加,就得到這一楨圖像的調(diào)焦評(píng)價(jià)函數(shù)。將調(diào)焦評(píng)價(jià)函數(shù)的最大值及此時(shí)的步進(jìn)電機(jī)行程記錄下來(lái)。一幀圖像的數(shù)據(jù)采集和計(jì)算處理結(jié)束后,步進(jìn)電機(jī)以一個(gè)較大的步長(zhǎng)定向前進(jìn),重復(fù)數(shù)據(jù)采集和計(jì)算的過(guò)程,直到步進(jìn)電機(jī)走完規(guī)定的行程。
2.2 優(yōu)化的搜索算法
本系統(tǒng)采用了一種優(yōu)化的爬山搜索算法。控制策略為:先根據(jù)整個(gè)行程的調(diào)焦評(píng)價(jià)函數(shù)值,獲得調(diào)焦評(píng)價(jià)函數(shù)與步進(jìn)電機(jī)行程的關(guān)系曲線,從曲線上可以判斷選擇最大的步進(jìn)電機(jī)步長(zhǎng)。在判斷選擇時(shí),既要保證不會(huì)錯(cuò)過(guò)調(diào)焦評(píng)價(jià)函數(shù)的最大值區(qū)域,同時(shí)又要滿足以最少的步數(shù)走完全程。在獲得全程最大調(diào)焦評(píng)價(jià)函數(shù)區(qū)域后,將步進(jìn)電機(jī)步長(zhǎng)減小,在最大值區(qū)域內(nèi)進(jìn)一步搜索更精確的對(duì)焦位置。采用這一策略,既不會(huì)發(fā)生誤判或找不到對(duì)焦點(diǎn)的情況,又能以較快的速度進(jìn)行對(duì)焦。軟件設(shè)計(jì)為:電機(jī)驅(qū)動(dòng)鏡頭從起始位置出發(fā),先以等步長(zhǎng)走一遍全程,記錄下調(diào)焦評(píng)價(jià)函數(shù)最大值時(shí)的鏡頭位置,然后鏡頭回到調(diào)焦評(píng)價(jià)函數(shù)最大值位置的前一站,換用小步長(zhǎng),從調(diào)焦評(píng)價(jià)函數(shù)最大值位置的前一站走到最大值位置的后一站,記錄下這一全程的調(diào)焦評(píng)價(jià)函數(shù)最大值時(shí)的鏡頭位置,如此反復(fù)搜索,最后鏡頭停止在調(diào)焦評(píng)價(jià)函數(shù)最大值處,使系統(tǒng)實(shí)現(xiàn)正確對(duì)焦。采用這一方法,既可以避免電機(jī)盲目反轉(zhuǎn),又能確保系統(tǒng)找到正確的對(duì)焦點(diǎn),而且搜索歷程短,有利于快速對(duì)焦。
3 自動(dòng)對(duì)焦實(shí)驗(yàn)結(jié)果
在優(yōu)化的爬山搜索算法中,選取最大步長(zhǎng)要以調(diào)焦評(píng)價(jià)函數(shù)的變化趨勢(shì)為依據(jù)。在本系統(tǒng)中選擇最大步長(zhǎng)為30H,這樣總能測(cè)到一個(gè)最大值或兩個(gè)次大值中的一個(gè)數(shù)據(jù),在第二次搜索時(shí)就一定能找到調(diào)焦評(píng)價(jià)函數(shù)的最大值。
- 對(duì)焦系統(tǒng)(6404)


聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。 舉報(bào)投訴
相關(guān)推薦
Summit微電子SMB274,讓自動(dòng)對(duì)焦成為手機(jī)攝像頭標(biāo)配
 950
9500.4S極速自動(dòng)對(duì)焦|高德智感PS系列高性能紅外熱像儀,全球首發(fā)
1926DSP NSAT-2000自動(dòng)化測(cè)試系統(tǒng)
自動(dòng)對(duì)焦在智能手機(jī)的應(yīng)用
自動(dòng)對(duì)焦(AF)馬達(dá)
Aigtek功率放大器應(yīng)用案例—液晶透鏡爬山自動(dòng)對(duì)焦算法研究
FPGA自動(dòng)調(diào)焦過(guò)程怎么實(shí)現(xiàn)?
labviEW相機(jī)的控制、自動(dòng)對(duì)焦與圖像采集技術(shù)的畢業(yè)論文
labview視覺(jué)自動(dòng)對(duì)焦
lv調(diào)用halcon自動(dòng)對(duì)焦
【NXP LPC54110試用申請(qǐng)】紅外相機(jī)自動(dòng)對(duì)焦鏡頭控制板
【TL6748 DSP申請(qǐng)】自動(dòng)倒車系統(tǒng)
【TL6748 DSP申請(qǐng)】基于DSP的太陽(yáng)自動(dòng)跟蹤控制系統(tǒng)
兩種常見(jiàn)的對(duì)焦基本原理
光學(xué)鏡頭上的自動(dòng)對(duì)焦馬達(dá)
分享一款不錯(cuò)的基于DSP的小型直流風(fēng)扇自動(dòng)化測(cè)試系統(tǒng)
如何提高嵌入式DSP系統(tǒng)設(shè)計(jì)與自動(dòng)化程度?
安捷倫數(shù)碼相機(jī)自動(dòng)對(duì)焦LED亮度達(dá)18堪
怎么能同時(shí)與cyu***3065接口OV5640改變自動(dòng)對(duì)焦步長(zhǎng)
急求一款有1394接口的DSP開(kāi)發(fā)板
我的三星S5830不能自動(dòng)對(duì)焦了,我朋友的卻可以??
手機(jī)是如何實(shí)現(xiàn)自動(dòng)對(duì)焦的?
最近要做一個(gè)項(xiàng)目。基于溫度補(bǔ)償?shù)溺R頭自動(dòng)對(duì)焦
有沒(méi)有人了解自動(dòng)對(duì)焦的音圈馬達(dá)驅(qū)動(dòng)呢?
有沒(méi)有使用AN41908 進(jìn)行AF自動(dòng)對(duì)焦?
求助,esp32 camera源碼的ov5640支持自動(dòng)對(duì)焦嗎?
用DSP調(diào)試sensor出來(lái)的圖像可以選擇哪一款芯片?
精工Precision自動(dòng)對(duì)焦功能的手機(jī)用CMOS Sensor
請(qǐng)問(wèn)論壇里有人研究過(guò)佳能自動(dòng)對(duì)焦鏡頭的電路和協(xié)議嗎
超聲電機(jī)—鏡頭自動(dòng)變焦、自動(dòng)對(duì)焦的應(yīng)用
基于DSP控制的變頻自動(dòng)恒壓供水系統(tǒng)設(shè)計(jì)
 32
32斑梨電子 樹(shù)莓派攝像頭自動(dòng)對(duì)焦1600萬(wàn)像素IMX519高清攝像頭模塊
斑梨電子樹(shù)莓派原裝攝像頭 1200萬(wàn)像素高清 自動(dòng)對(duì)焦IMX708攝像頭模塊
尼康自動(dòng)對(duì)焦閃光燈 SB-600數(shù)碼相機(jī)使用說(shuō)明書(用戶手冊(cè)
132尼康自動(dòng)對(duì)焦閃光燈 SB-400數(shù)碼相機(jī)使用說(shuō)明書(日語(yǔ)用戶
29尼康自動(dòng)對(duì)焦閃光燈 SB-900數(shù)碼相機(jī)使用說(shuō)明書(日語(yǔ)用戶
52尼康SB-800自動(dòng)對(duì)焦閃光燈數(shù)碼相機(jī)用戶手冊(cè)(使用說(shuō)明書)
107眼底照相系統(tǒng)自動(dòng)對(duì)焦的研究與設(shè)計(jì)
13基于DSP裂紋自動(dòng)磁粉探傷系統(tǒng)的研究
9基于ARM-linux的顯微鏡自動(dòng)對(duì)焦系統(tǒng)研究
34供應(yīng)數(shù)碼顯微鏡 普密斯自動(dòng)對(duì)焦視頻顯微鏡
基于DSP控制的變頻自動(dòng)恒壓供水系統(tǒng)設(shè)計(jì)
22普密斯PMS-LFS系列激光自動(dòng)對(duì)焦傳感器 顯微觀測(cè)傳感器
普密斯APO激光自動(dòng)對(duì)焦模組PMS-LF0411 激光對(duì)焦傳感器
基于DSP的自動(dòng)包裝機(jī)控制系統(tǒng)的軟件設(shè)計(jì)
34業(yè)內(nèi)尺寸最小的液體鏡頭驅(qū)動(dòng)器,用于自動(dòng)對(duì)焦的微型相機(jī)模塊-M
1224TMS320C6701 DSP自動(dòng)加載研究
2730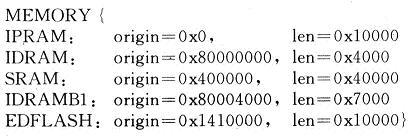
數(shù)碼相機(jī)對(duì)焦方式
404數(shù)碼攝像機(jī)對(duì)焦系統(tǒng)
636安華高科技發(fā)布新加強(qiáng)型超薄自動(dòng)對(duì)焦LED
846自動(dòng)對(duì)焦 省時(shí)省力:臺(tái)電高清攝像頭新品上市!
855DSP與基于標(biāo)準(zhǔn)總線的DSP系統(tǒng)
42DSP并行引導(dǎo)方法在氫鐘自動(dòng)調(diào)諧系統(tǒng)中的應(yīng)用
21TI發(fā)布超薄封裝自動(dòng)對(duì)焦驅(qū)動(dòng)器
1298DigitalOptics公司推出MEMS自動(dòng)對(duì)焦攝像頭模塊mems|cam
1821安森美半導(dǎo)體展示能在微光使用的快速自動(dòng)對(duì)焦技術(shù)
928雙核對(duì)焦是什么意思 相比傳統(tǒng)對(duì)焦方式區(qū)別
6326
可自動(dòng)對(duì)焦的電動(dòng)顯微成像系統(tǒng)_王文歡
7索尼大法A9終于發(fā)布:693個(gè)自動(dòng)對(duì)焦點(diǎn)+每秒60次自動(dòng)對(duì)焦恐怖!
10517常用自動(dòng)控制系統(tǒng)設(shè)計(jì),DSP嵌入式系統(tǒng)開(kāi)發(fā)典型案例
17DSP嵌入式系統(tǒng)開(kāi)發(fā)典型案例, 第4章 常用自動(dòng)控制系統(tǒng)設(shè)計(jì)
11基于離焦量定性差異量的自動(dòng)對(duì)焦方法
0OpenCV 圖像清晰度評(píng)價(jià)(相機(jī)自動(dòng)對(duì)焦)
15835用于攝像頭自動(dòng)對(duì)焦的音圈電機(jī)驅(qū)動(dòng)器
29安森美推出全功能自動(dòng)對(duì)焦控制器,用于智能手機(jī)相機(jī)模塊
293標(biāo)配自動(dòng)對(duì)焦的激光電視在不遠(yuǎn)的將來(lái)就會(huì)走進(jìn)用戶的視野
1110安森美半導(dǎo)體推出應(yīng)用于智能手機(jī)拍照模塊的低能耗自動(dòng)對(duì)焦控制IC
218盤點(diǎn)一下智能手機(jī)常用的對(duì)焦方式
7368銳爾威視科技自動(dòng)對(duì)焦AF高清USB攝像頭簡(jiǎn)介
3247
官宣:華為nova 6 5G前置“藥丸”形打孔雙攝,支持3200萬(wàn)自動(dòng)對(duì)焦
3089富士正式發(fā)布X系列旗艦無(wú)反相機(jī)“X-T4” 自動(dòng)對(duì)焦速度縮短至前所未有的0.02秒
3172首次Galaxy S20 Ultra更新可改善相機(jī)自動(dòng)對(duì)焦
6450超聲電機(jī)光學(xué)鏡頭自動(dòng)對(duì)焦系統(tǒng)的組成結(jié)構(gòu)以及特點(diǎn)
3321超聲電機(jī)之鏡頭自動(dòng)變焦、自動(dòng)對(duì)焦的應(yīng)用分析
3787
超聲波馬達(dá)已成為了目前鏡頭內(nèi)置自動(dòng)對(duì)焦馬達(dá)的主流技術(shù)
3598光學(xué)鏡頭上的自動(dòng)對(duì)焦馬達(dá)的詳細(xì)介紹
3AF自動(dòng)對(duì)焦基本概念解讀
5499香港希荻微與韓國(guó)動(dòng)運(yùn) 簽署《自動(dòng)對(duì)焦和光學(xué)防抖技術(shù)許可協(xié)議》
477
詳解投影儀自動(dòng)對(duì)焦鏡頭馬達(dá)驅(qū)動(dòng)原理
1277
激光對(duì)焦壓電方案,讓對(duì)焦更高速!
447
相位檢測(cè)自動(dòng)對(duì)焦點(diǎn)是什么意思 相位檢測(cè)自動(dòng)對(duì)焦(PDAF)有哪些優(yōu)勢(shì)
1774人工智能伺服自動(dòng)對(duì)焦是什么意思
1854什么是自動(dòng)對(duì)焦?自動(dòng)對(duì)焦技術(shù)的優(yōu)勢(shì)在哪?
1382Sheba推出革命性的MEMS自動(dòng)對(duì)焦執(zhí)行器
339全自動(dòng)影像儀圖像自動(dòng)匹配對(duì)焦,測(cè)量一致性好
280
全自動(dòng)影像測(cè)量?jī)x圖像自動(dòng)匹配對(duì)焦介紹
254
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:[email protected]
- 內(nèi)容合作
- 黃晶晶:[email protected]
- 內(nèi)容合作(海外)
- 張迎輝:[email protected]
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:[email protected]
- 投資合作
- 曾海銀:[email protected]
- 社區(qū)合作
- 劉勇:[email protected]
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
{kind=link}
評(píng)論